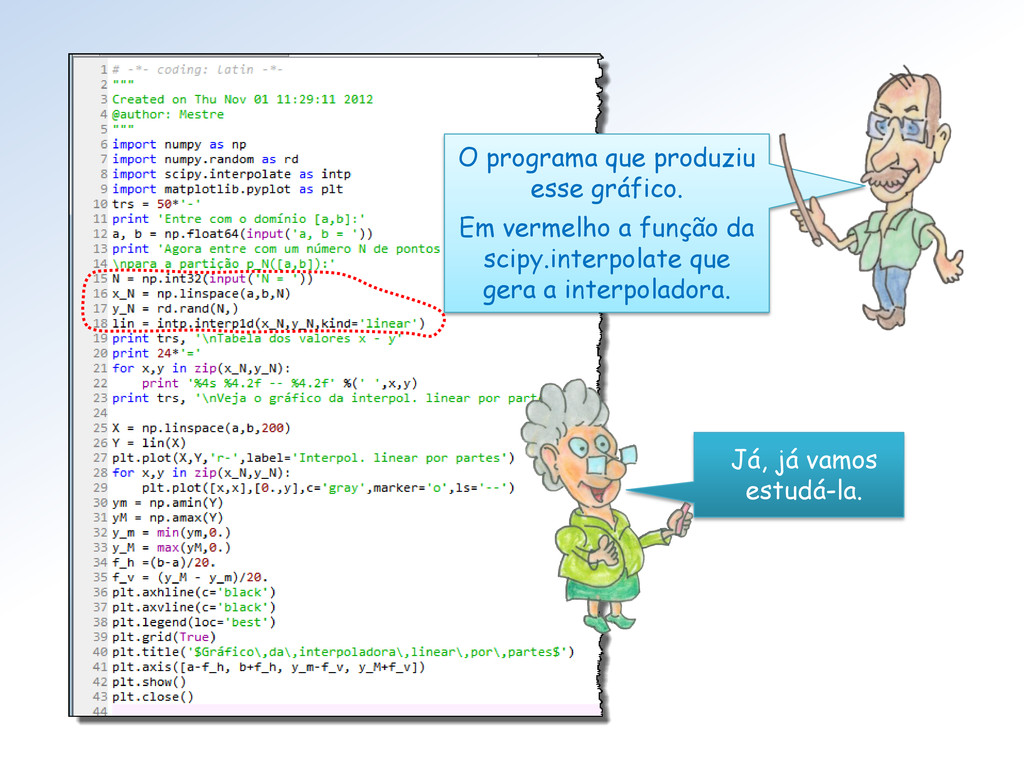
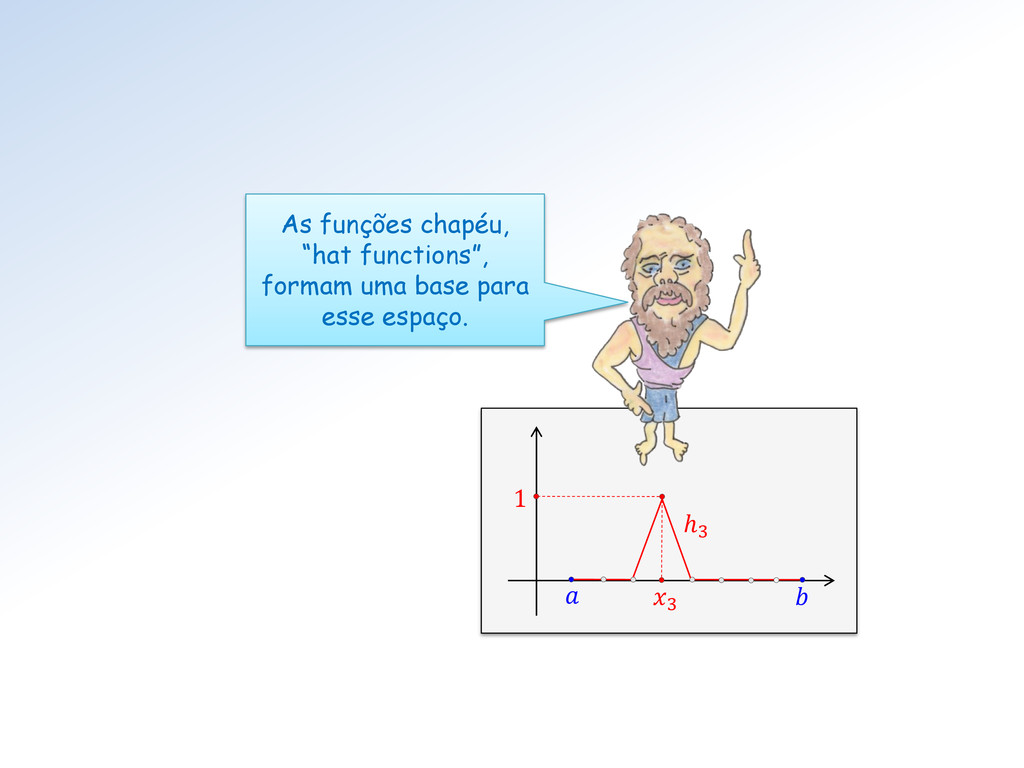
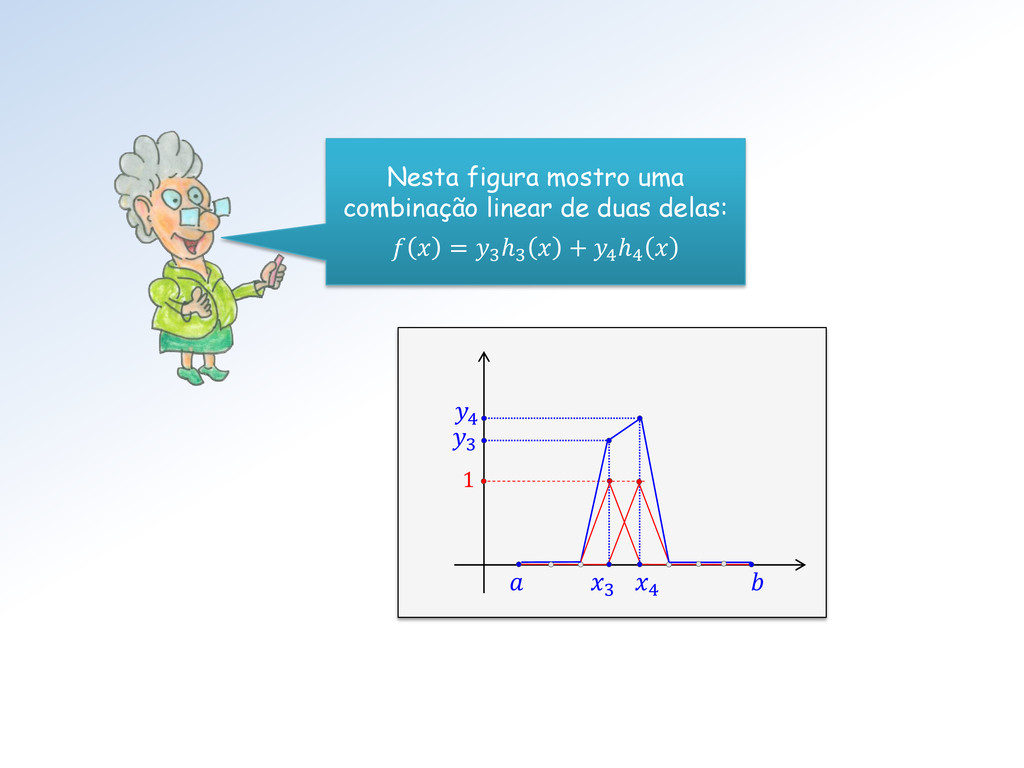
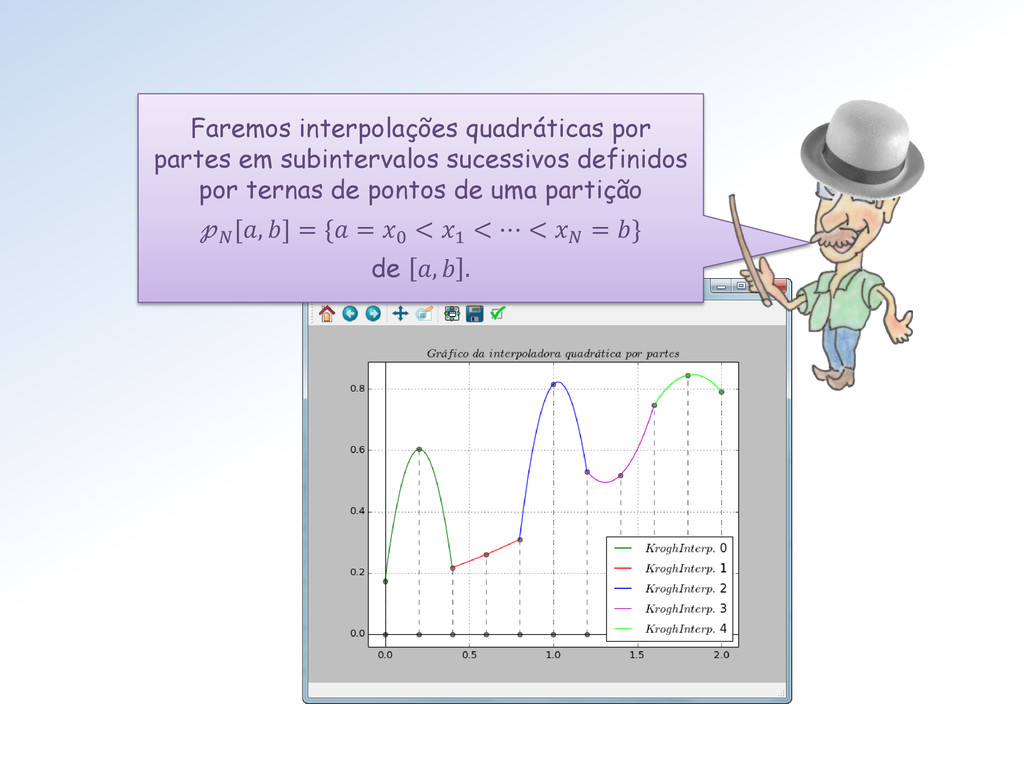
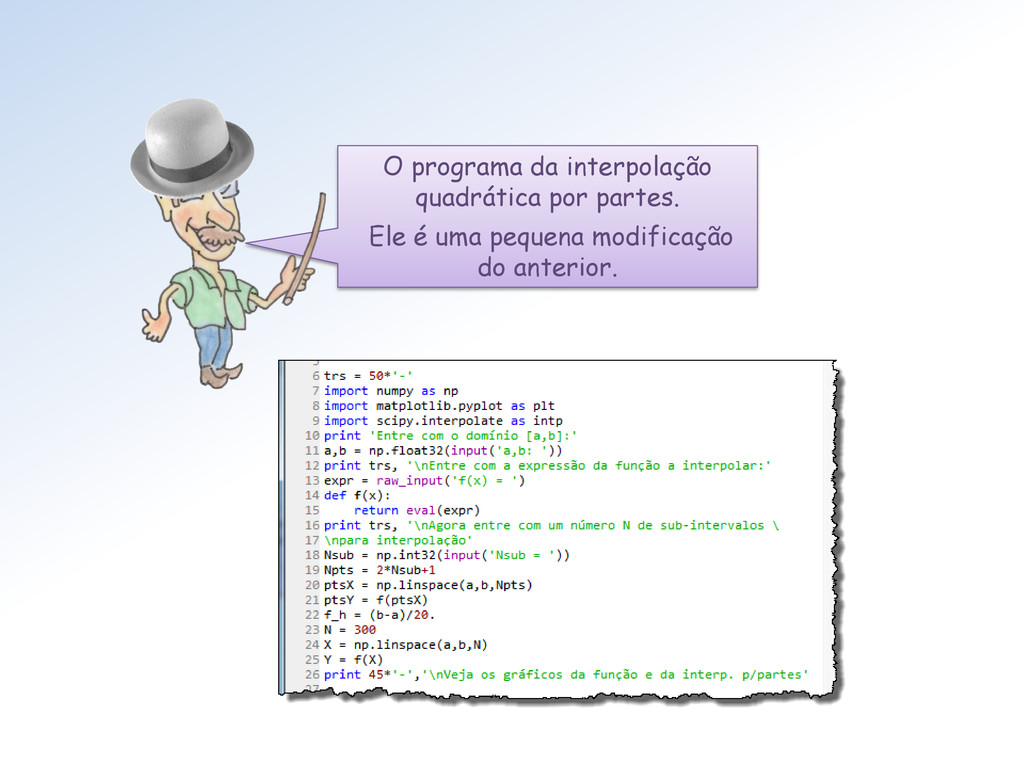
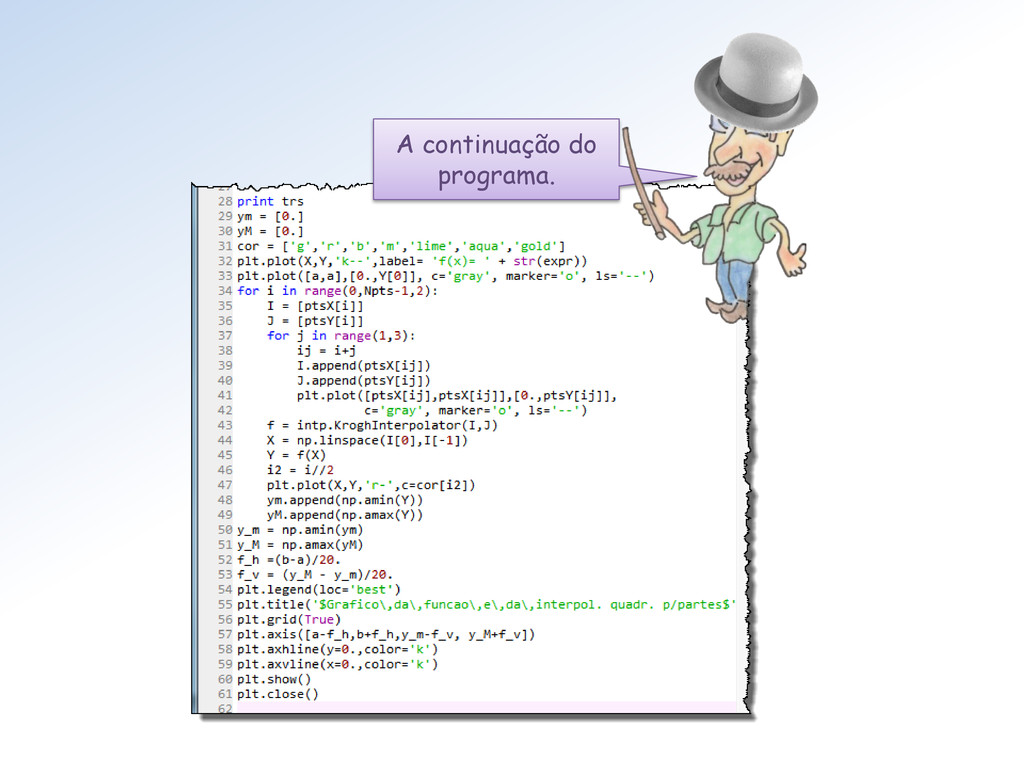
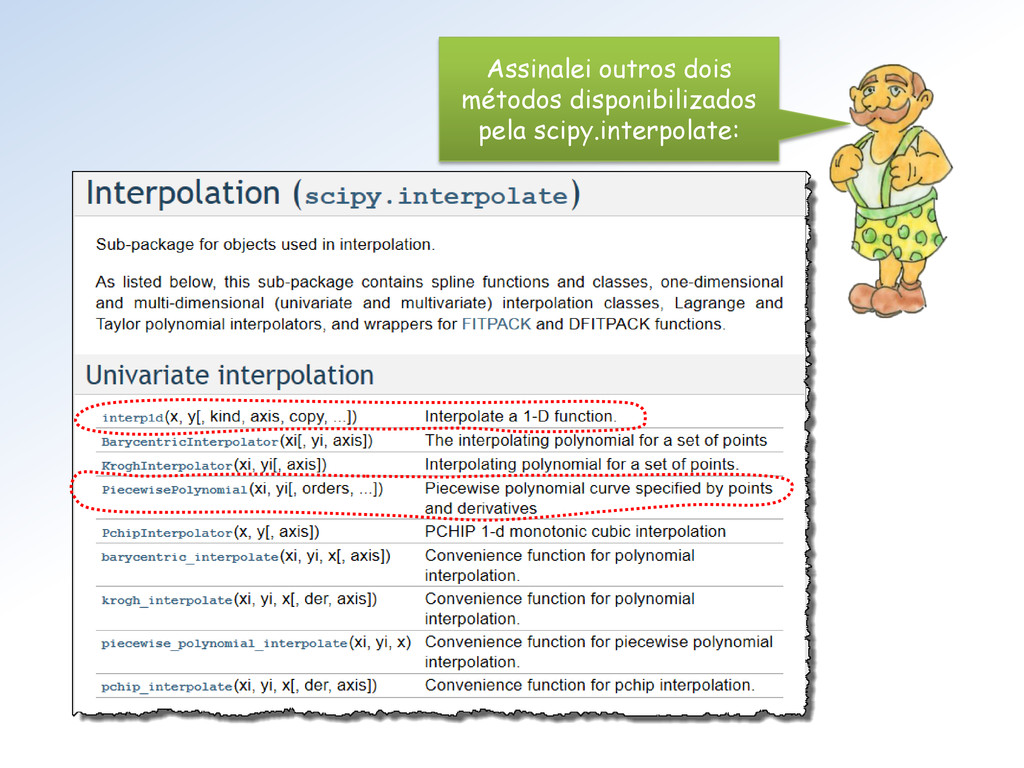
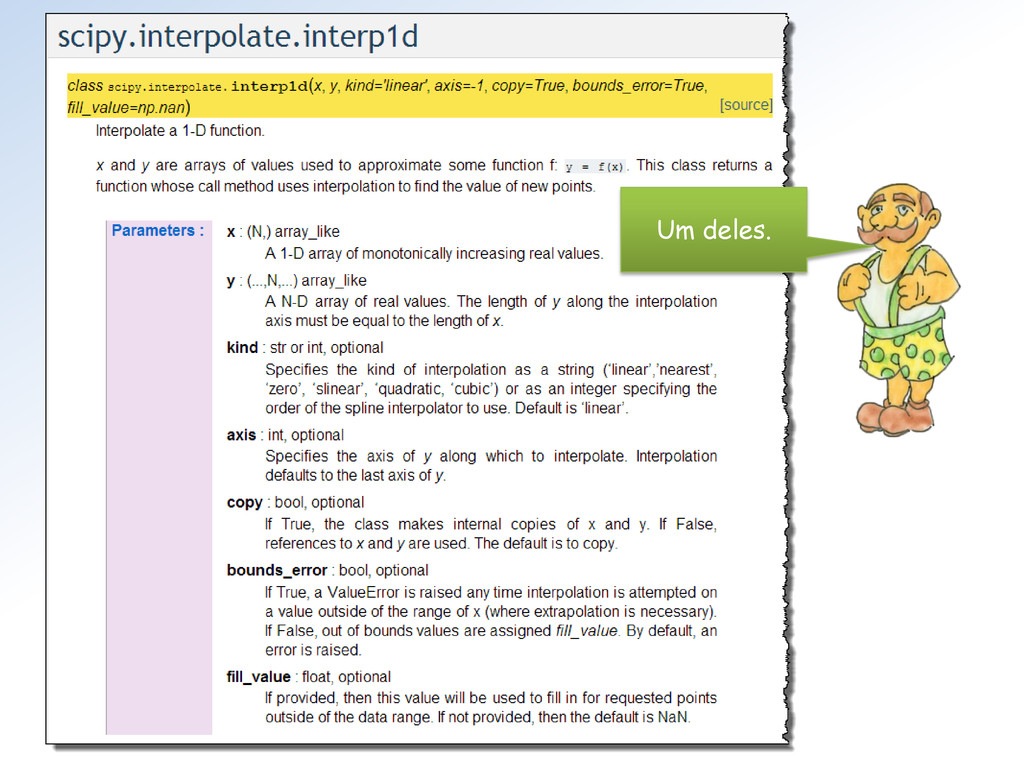
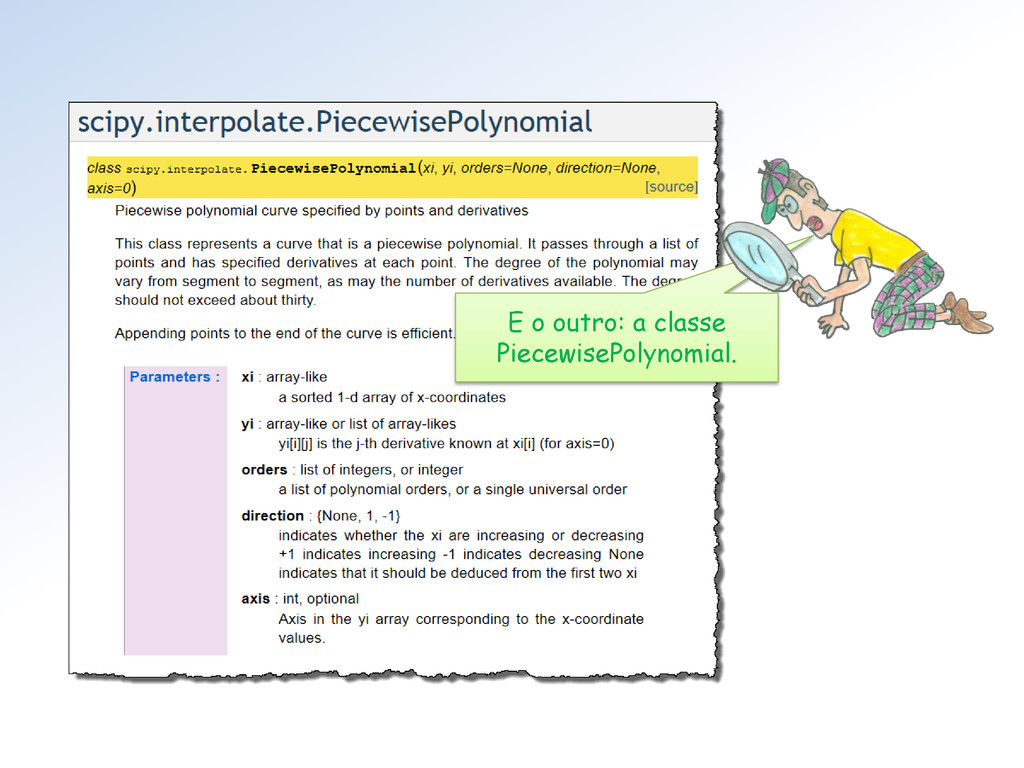
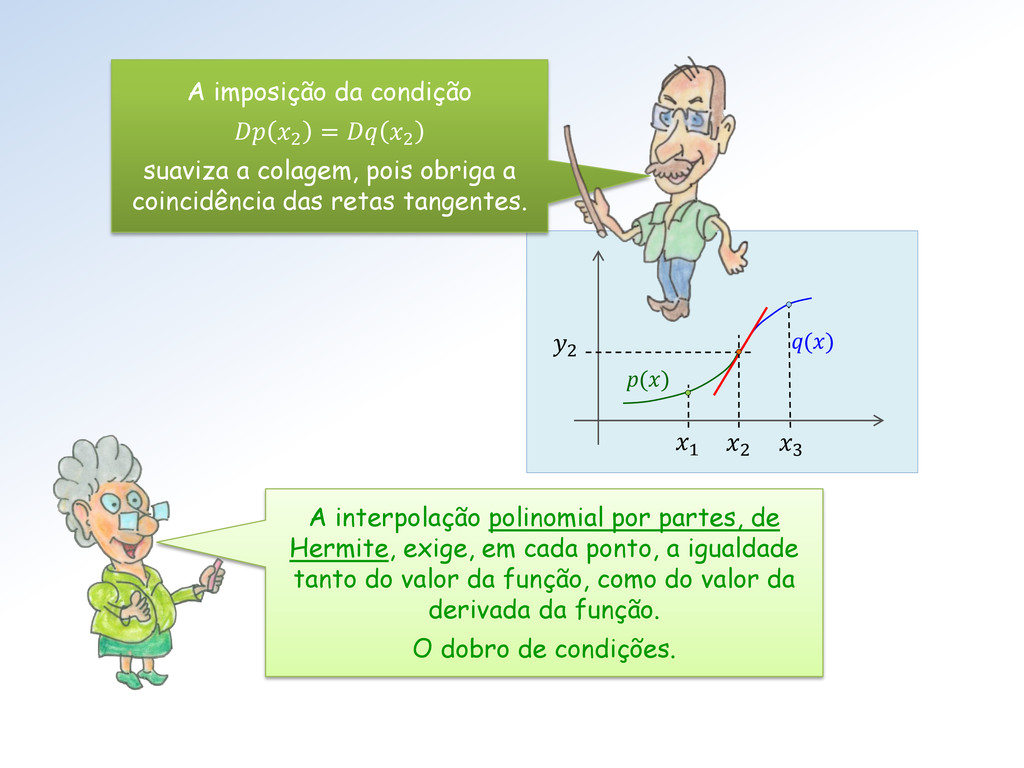
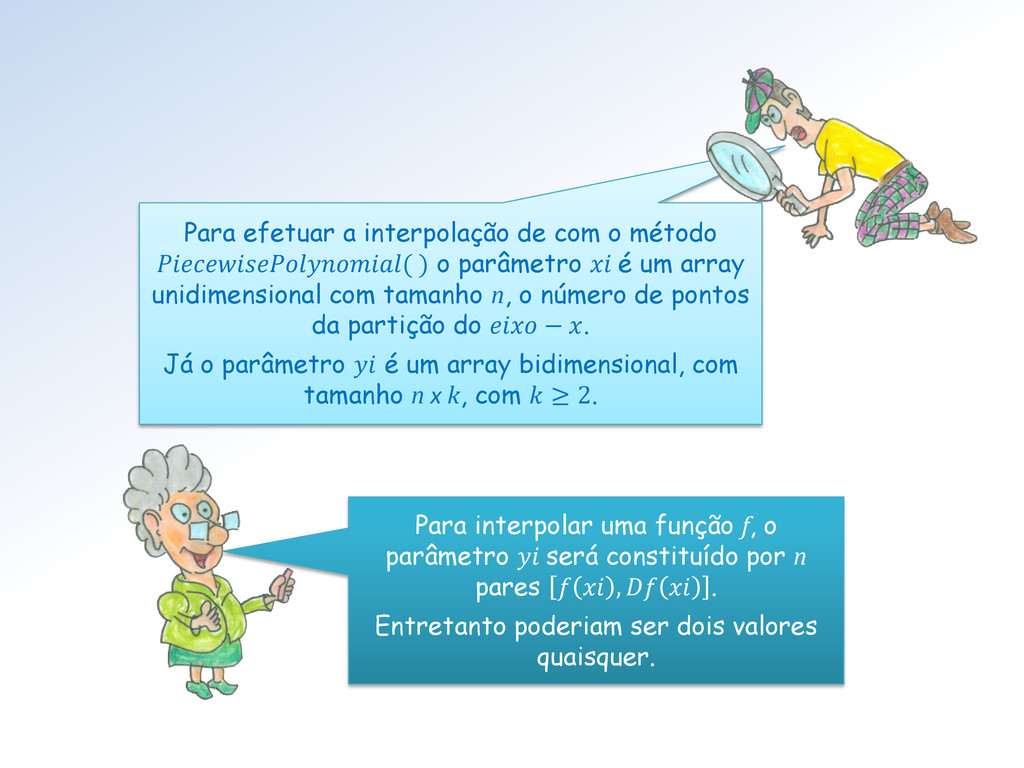
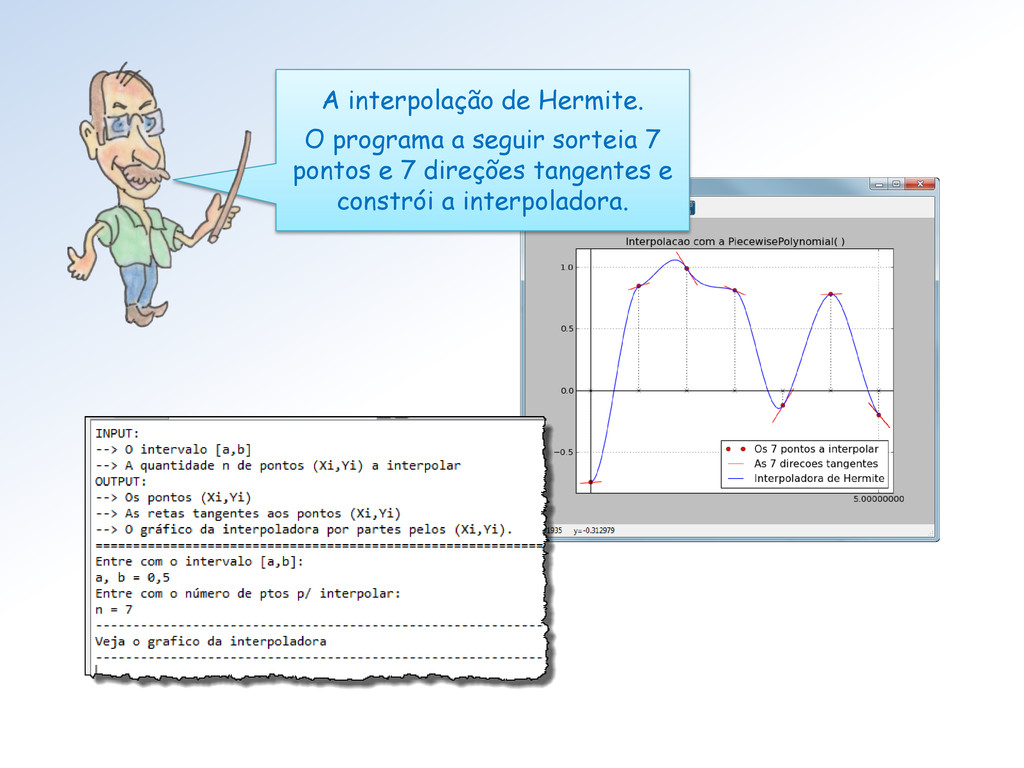
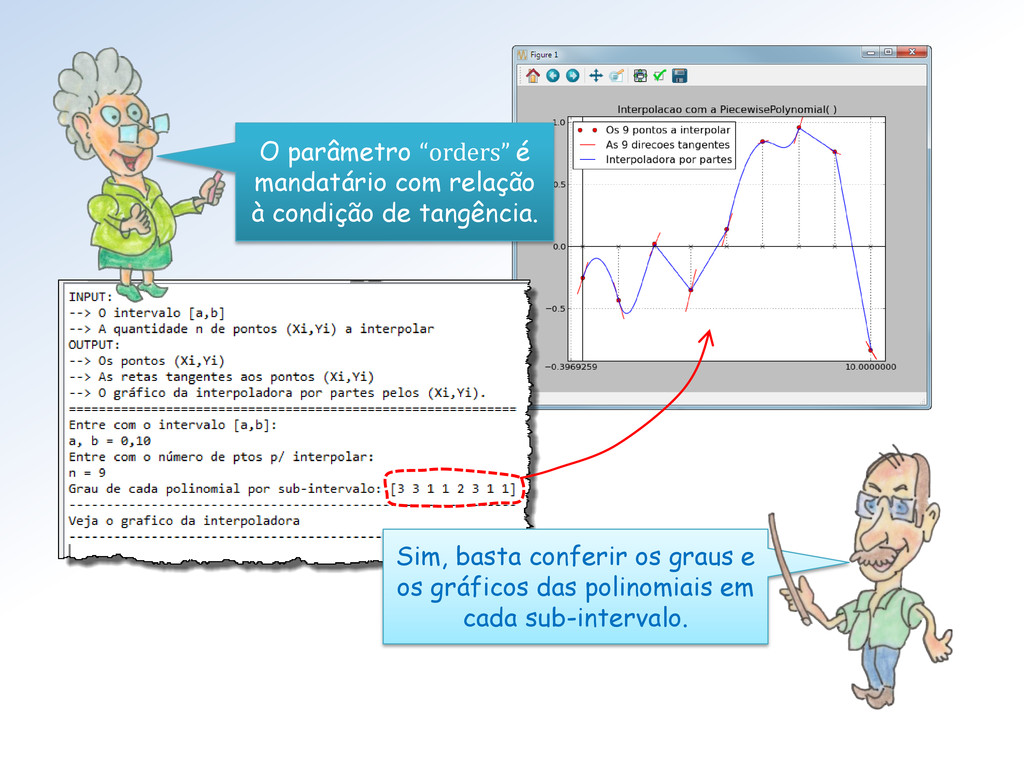
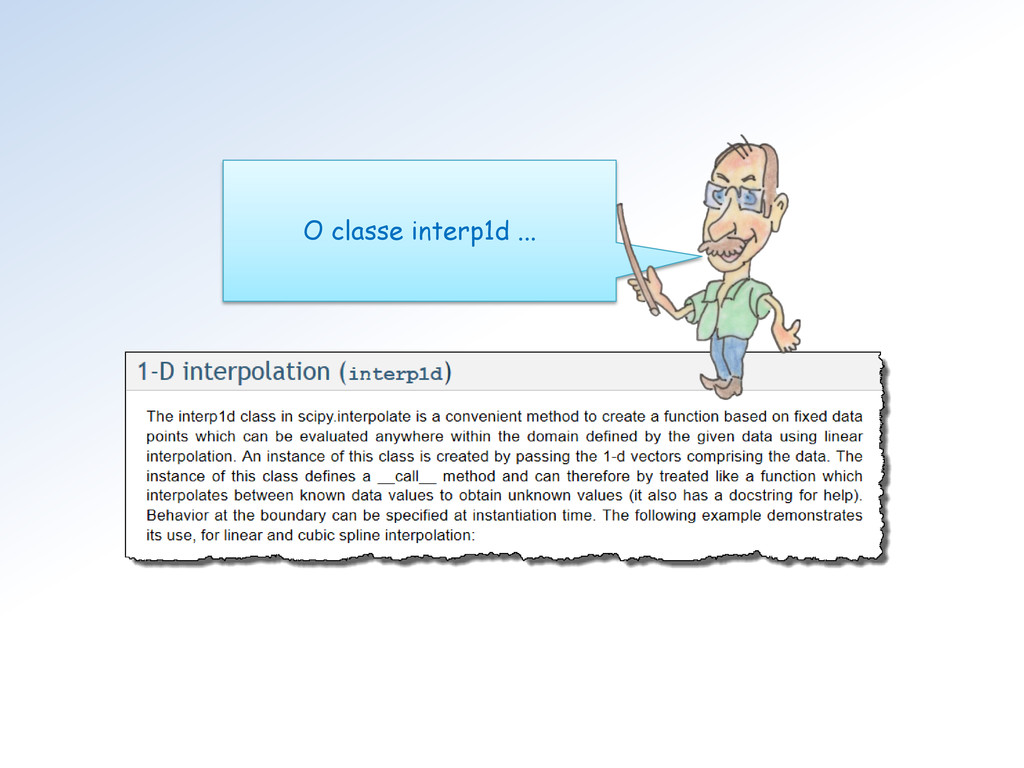
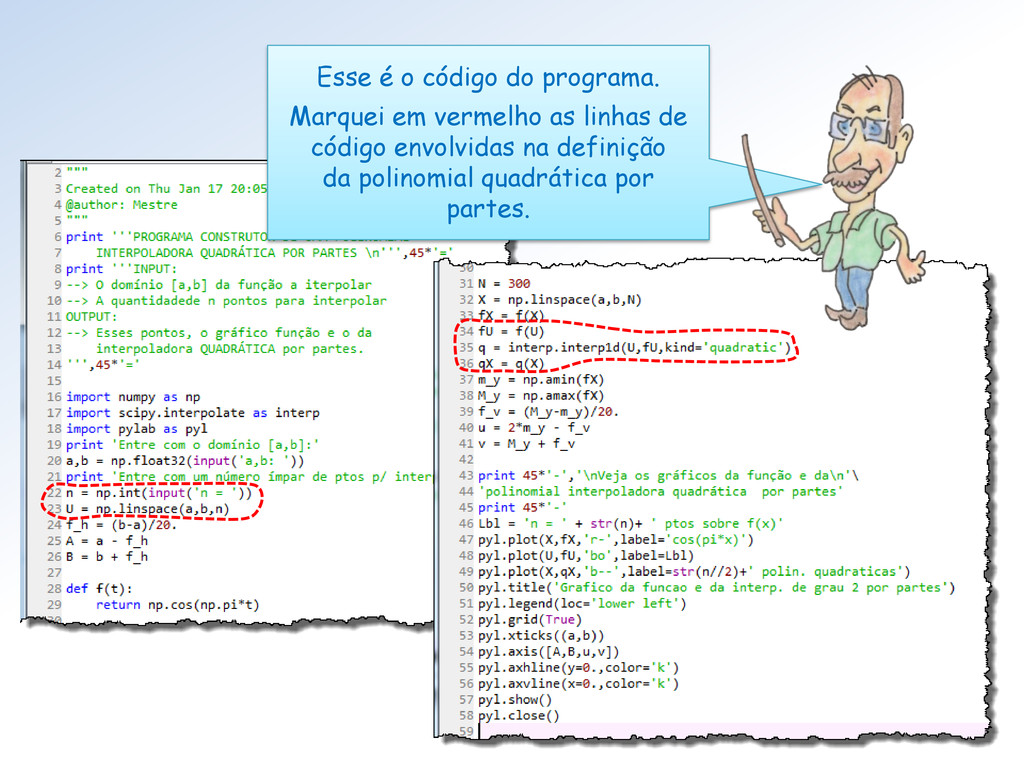
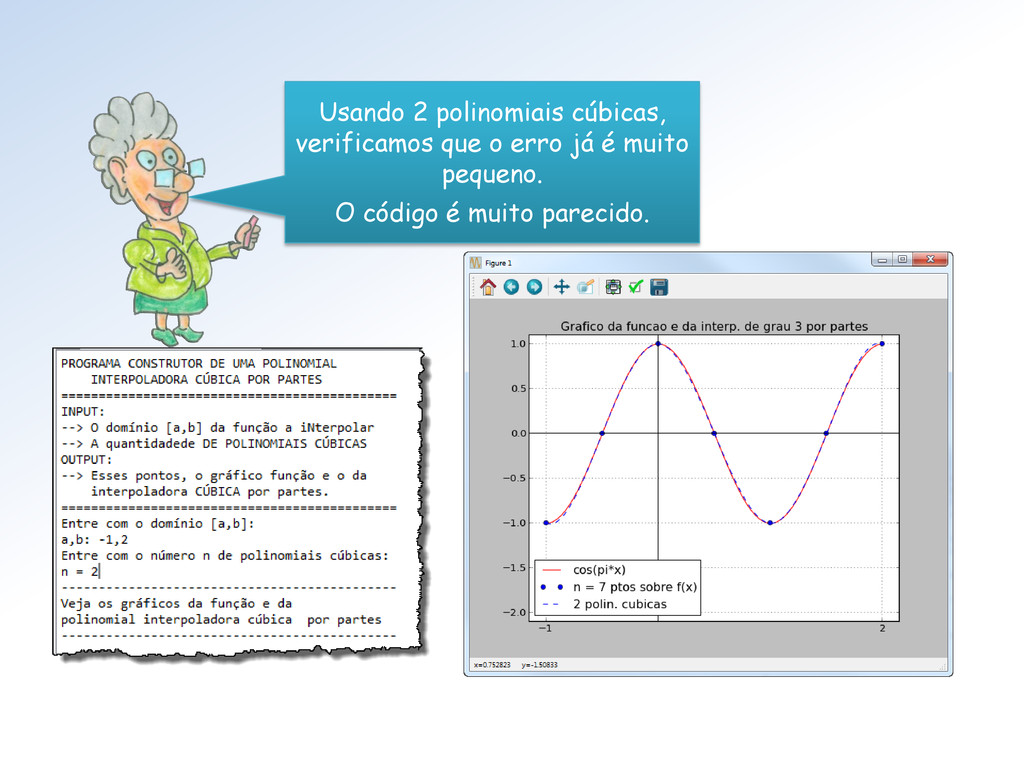
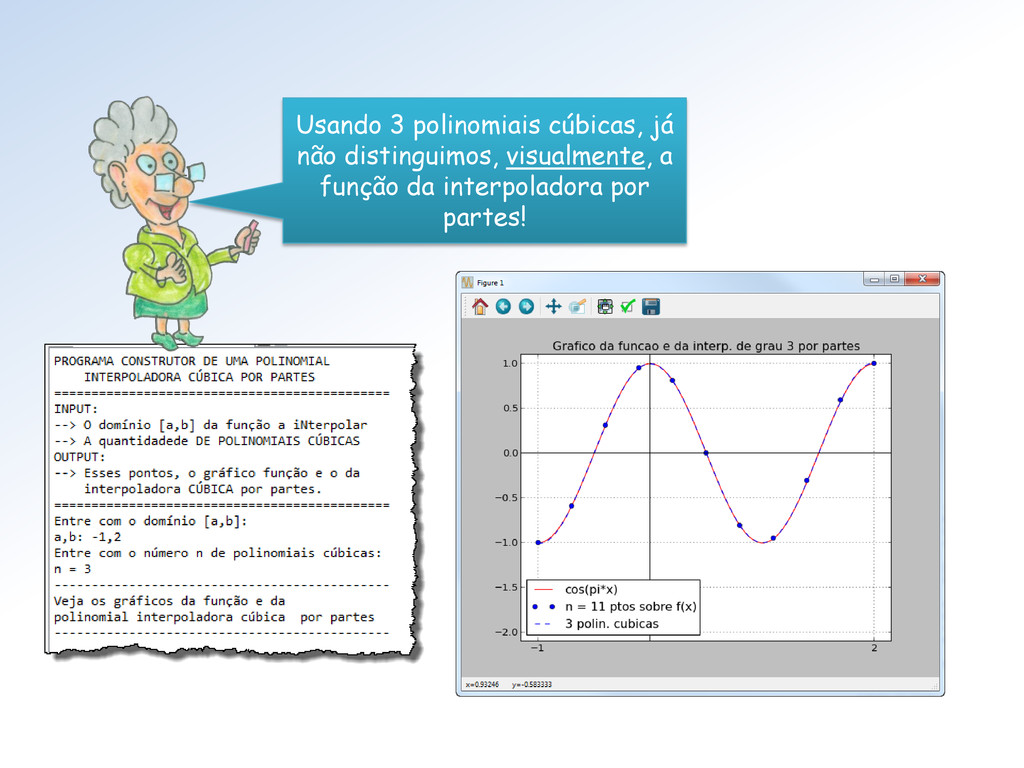
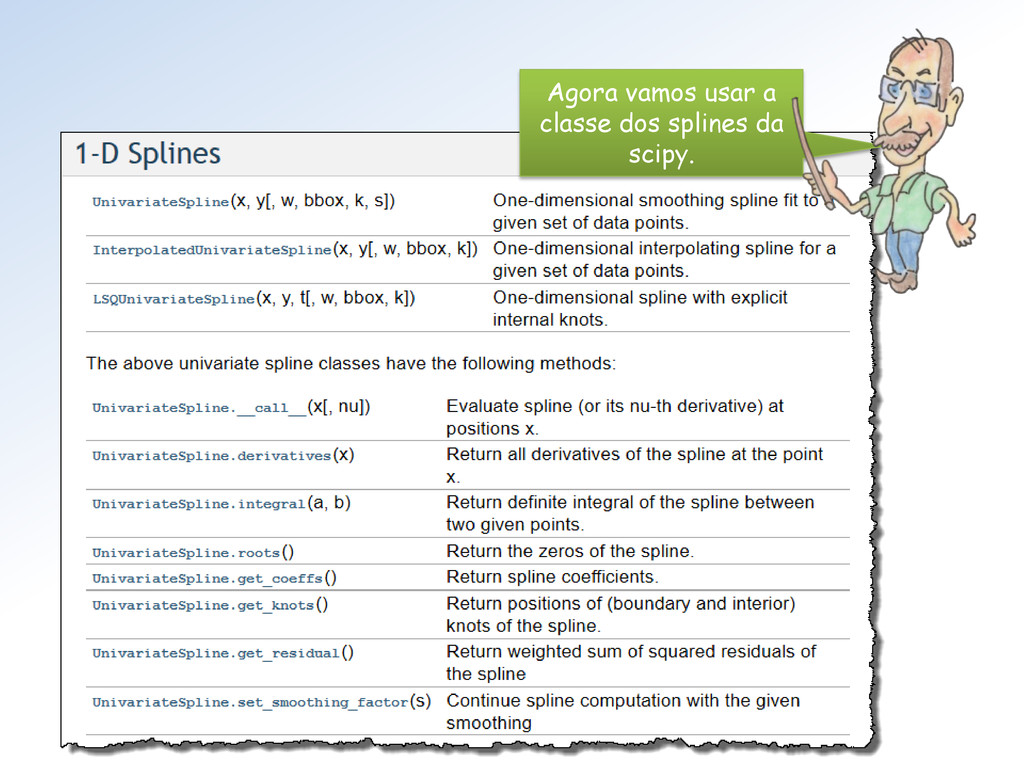
Iniciamos com o espaço das funções contínuas e lineares por partes e a base de funções chapéu (de bruxa). Depois analisamos as funções contínuas e quadráticas por partes, com sua base de funções chapéu coco (de Charlie Chaplin). Em seguida olhamos para interpolação de Hermite e usamos os métodos interp1d( ) e a classe PiecewisePolynomial da scipy.interpolate. Encerramos com splines interpoladores para funções reais a valores reais e curvas no plano.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
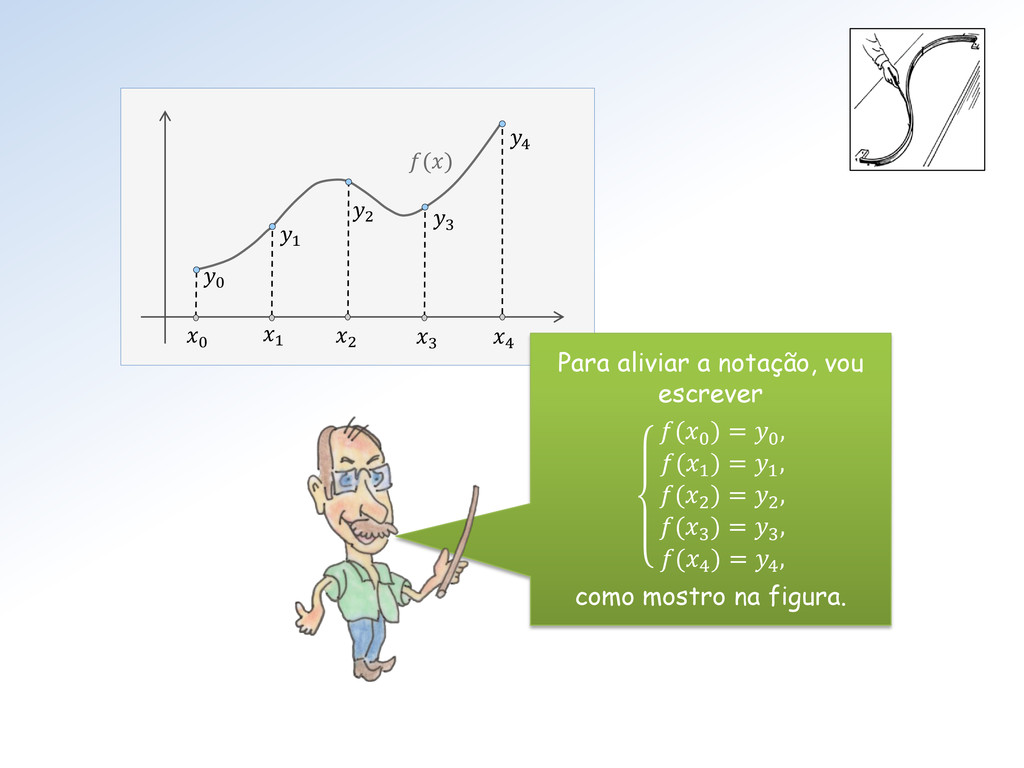
![Seja () uma função definida num intervalo [, ]. Uma](https://files.speakerdeck.com/presentations/af15a9503f5e0131c51976c2ec7c4e6f/slide_59.jpg){kind=link}
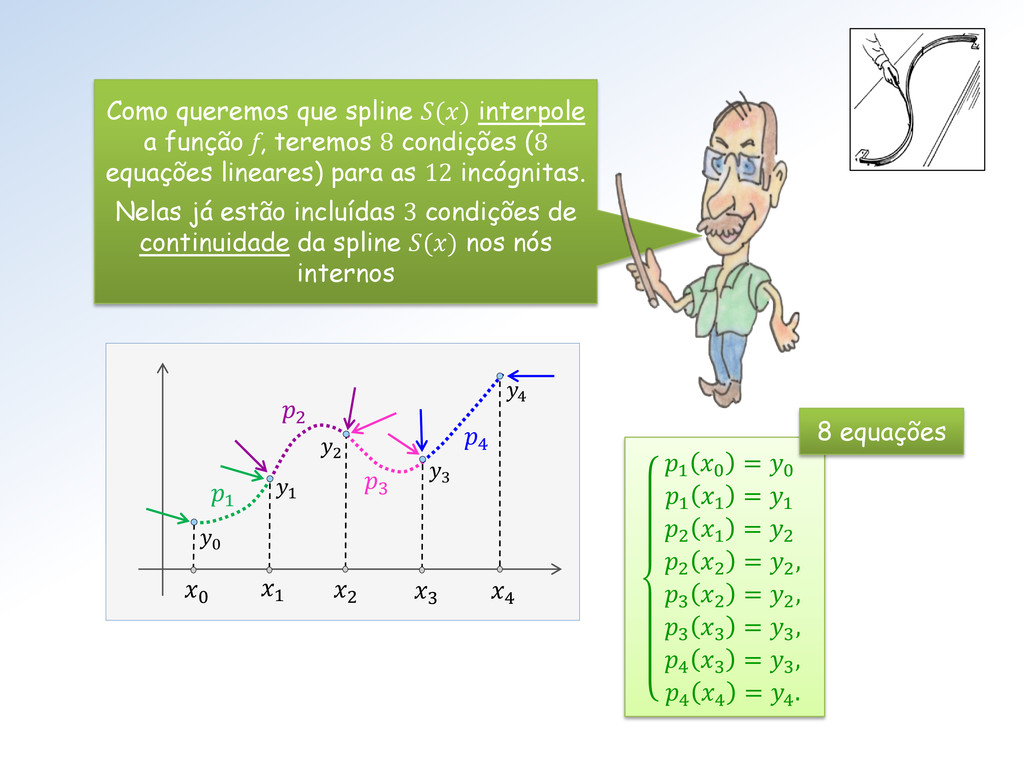
![Uma “spline” cúbica interpolante: É uma função : [, ]](https://files.speakerdeck.com/presentations/af15a9503f5e0131c51976c2ec7c4e6f/slide_60.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}