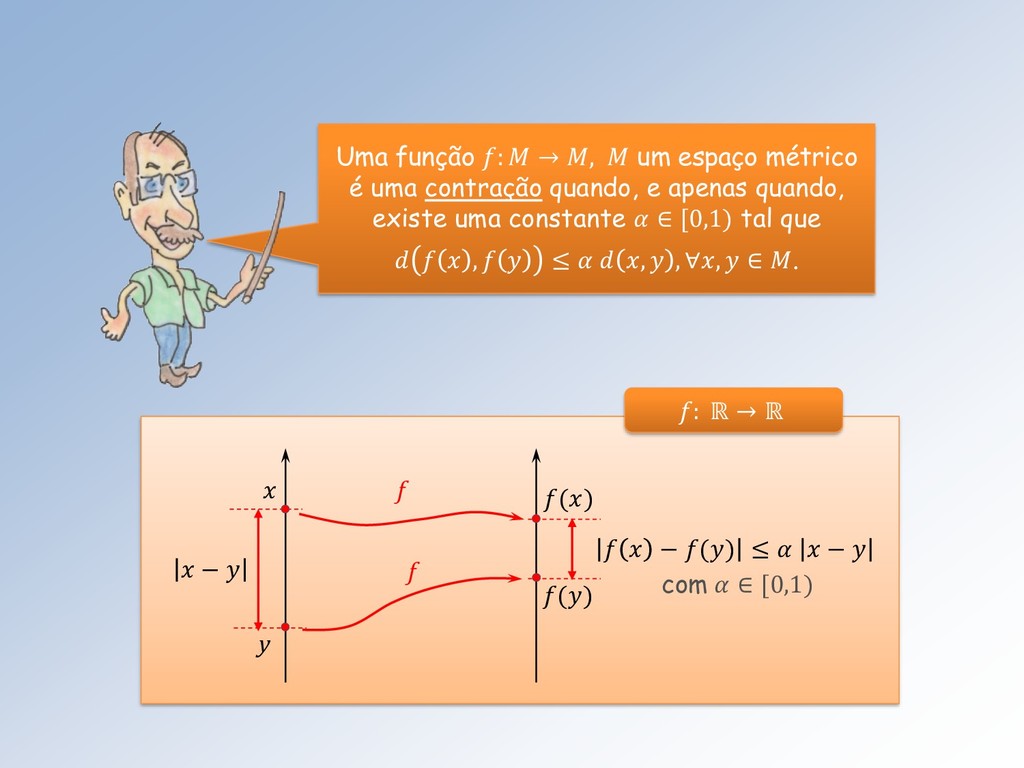
não-negatividade 2. , = 0 ↔ = 3. , = , – simetria 4. , ≤ , + , − desigualdade triangular Um espaço métrico é uma entidade matemática constituída por um conjunto M e uma função : × → ℝ, chamada métrica do espaço, (para medir distâncias) que satisfaz as propriedades óbvias:
figura que − < < + (), i. é, − − + < < − + . Portanto − − < − < ( − ) ou, − () < ( − ), já que = (). Claro que o mesmo vale para ∈ 0,1 , < . E em p temos a igualdade, assim − () ≤ − , ∀ ∈ [0,1].
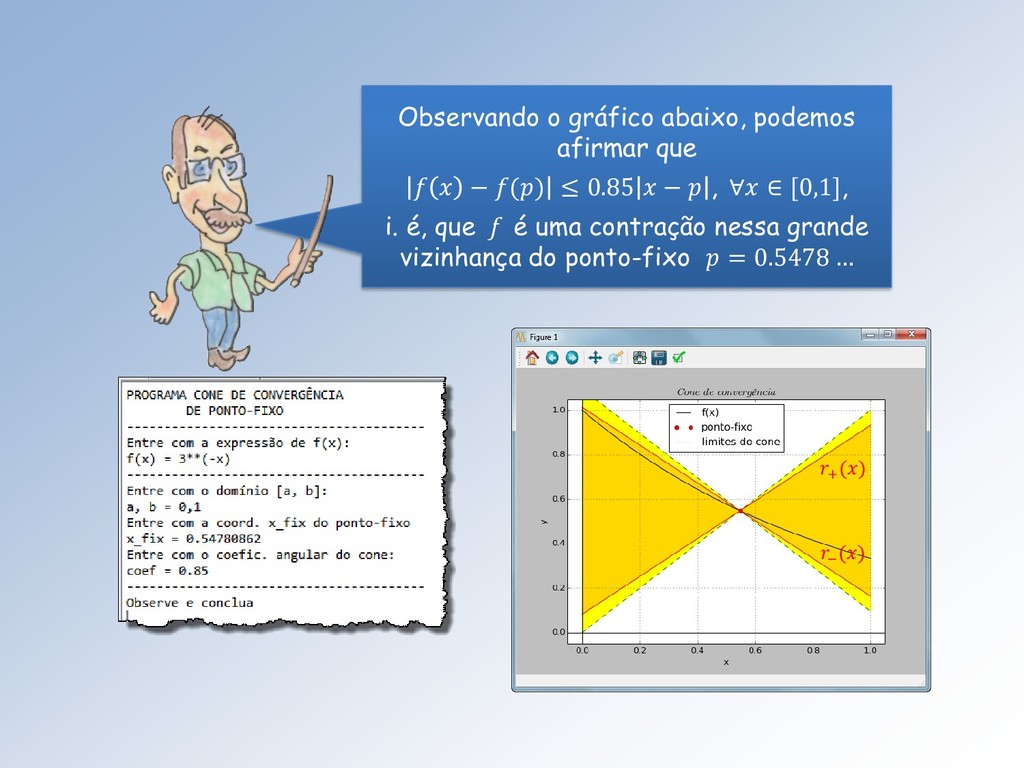
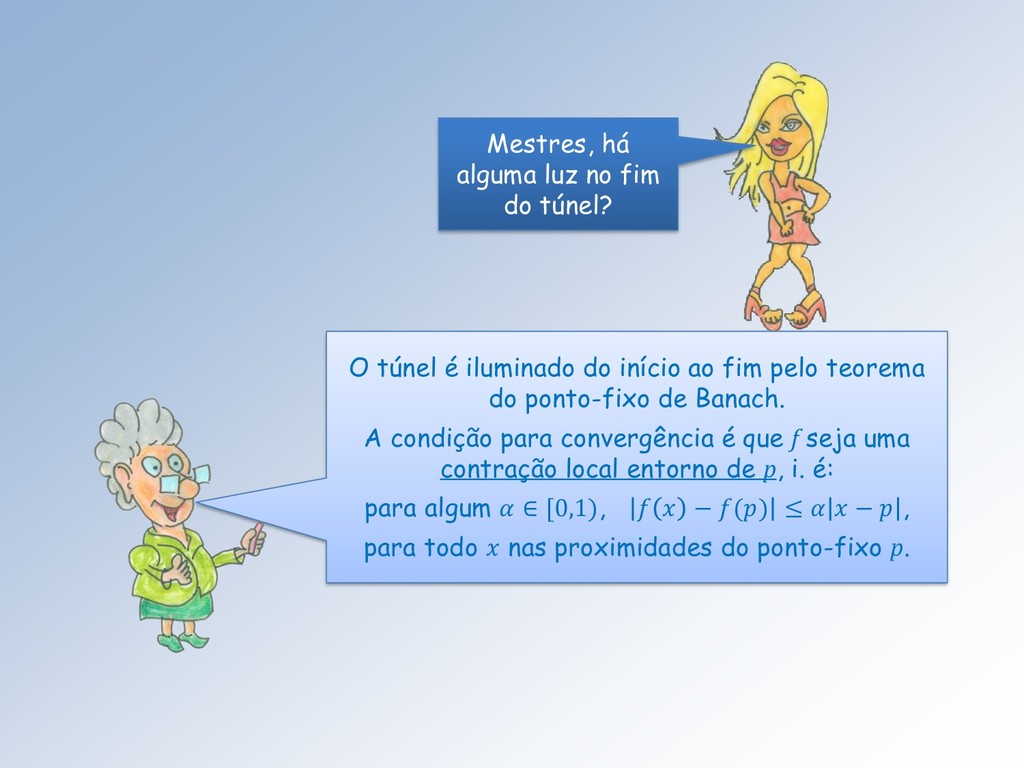
do ponto-fixo de Banach. A condição para convergência é que f seja uma contração local entorno de p, i. é: para algum ∈ [0,1), − () ≤ − , para todo nas proximidades do ponto-fixo p. Mestres, há alguma luz no fim do túnel?
3. f é derivável em (a, b) 4. ∃ ∈ 0, 1 tal que ′() ≤ , ∀ ∈ (, ) então, definindo uma sequência 0 , 1 , … , , … por +1 = ( ), com 0 ∈ [, ] poderemos afirmar que: a. lim →∞ = e p é o único ponto fixo de f em [, ] b. − ≤ 0 − , − 0 c. − ≤ Τ [ (1 − )] 1 − 0 , ∀ > 1. Às páginas 58,59 do Análise Numérica de Burden & Faires, 8ª ed. encontramos uma demonstração do Teorema:
linear = , conhecidos na literatura como métodos estacionários. Como desejamos achar uma “raiz” da equação vetorial () = 0, em que = − , procuraremos por pontos-fixo de alguma função linear = + onde a matriz é obtida através de manipulação algébrica de ().
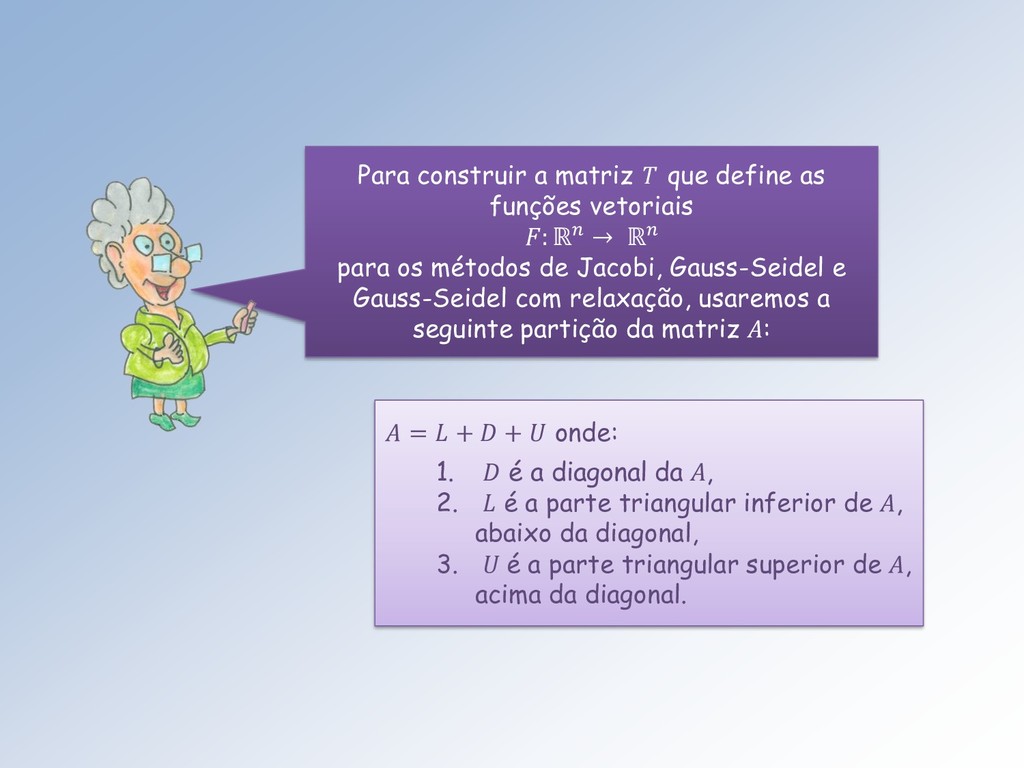
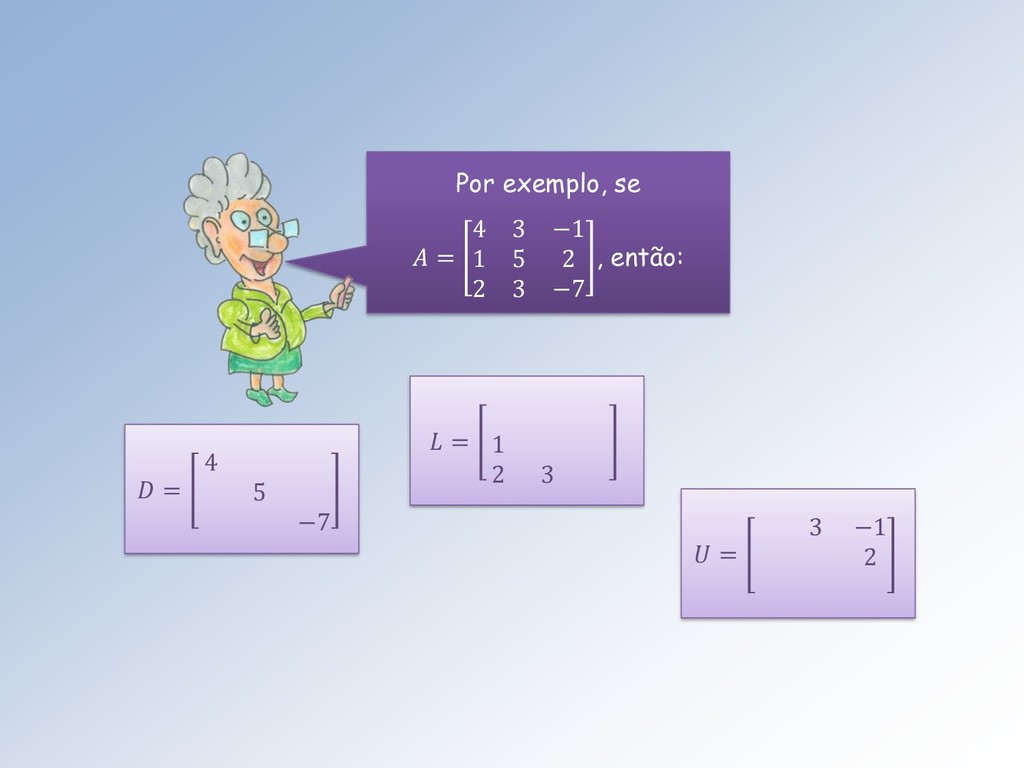
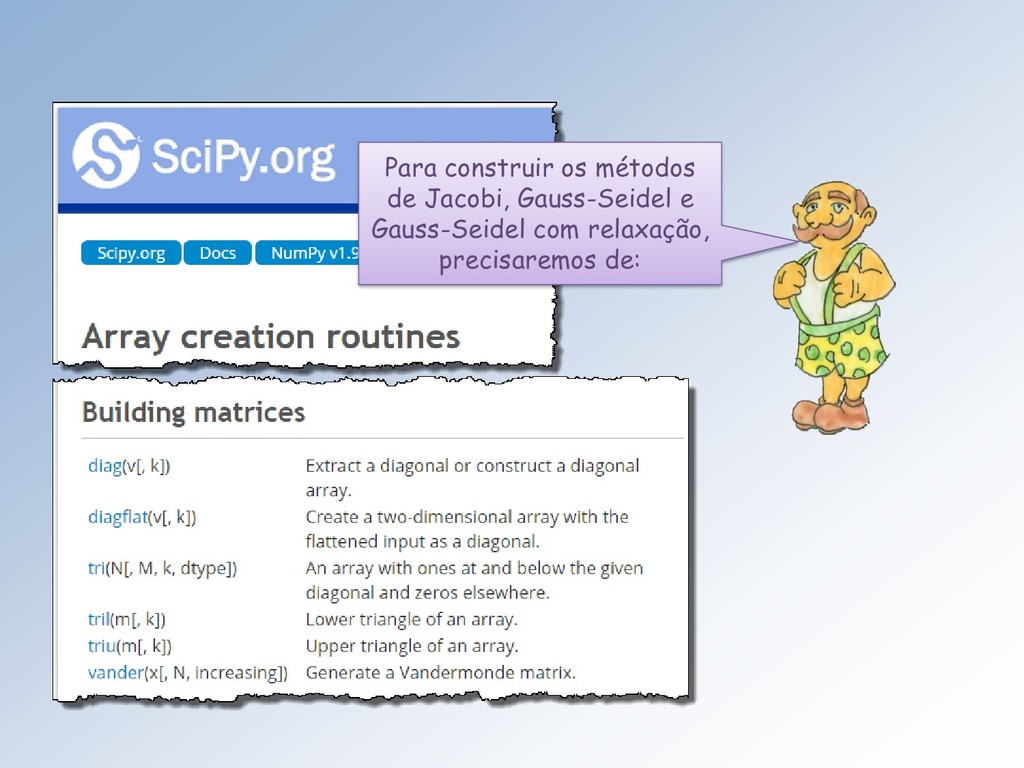
: ℝ → ℝ para os métodos de Jacobi, Gauss-Seidel e Gauss-Seidel com relaxação, usaremos a seguinte partição da matriz A: = + + onde: 1. é a diagonal da A, 2. L é a parte triangular inferior de A, abaixo da diagonal, 3. U é a parte triangular superior de A, acima da diagonal.
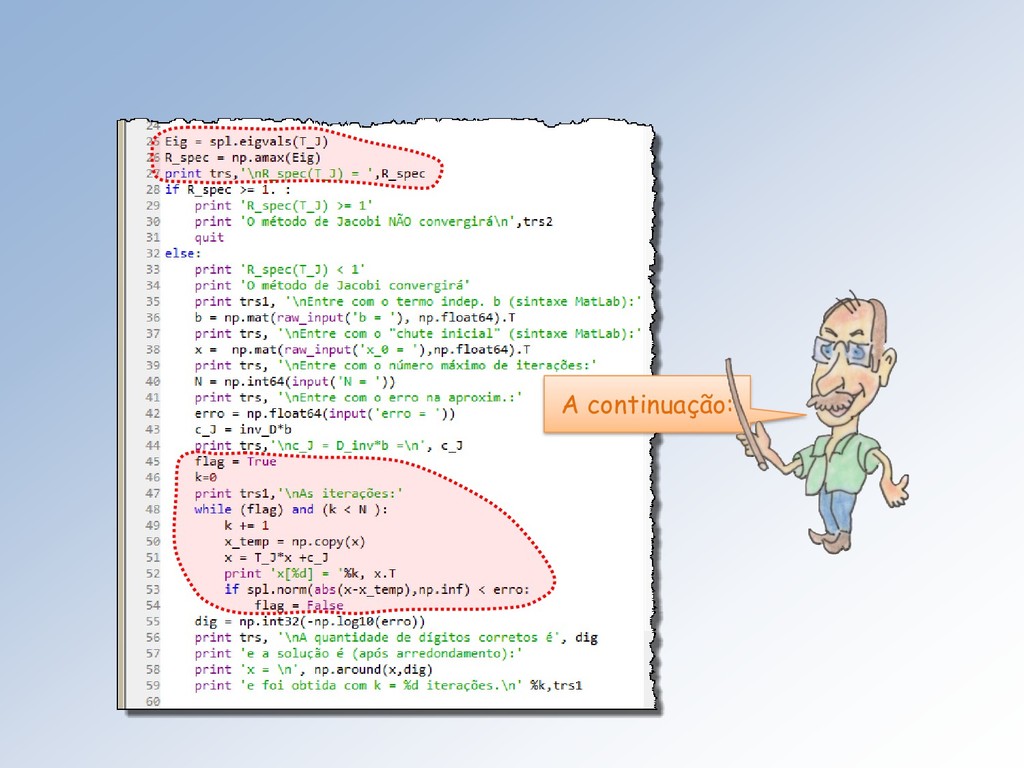
+1 = () para = 0,1,2, … com 0 um vetor qualquer de ℝ. Tanto no caso de Jacobi como no de Gauss-Seidel. Se a : ℝ → ℝ for uma contração essa sequência convergirá. Então, sendo = lim →∞ , teremos que = .
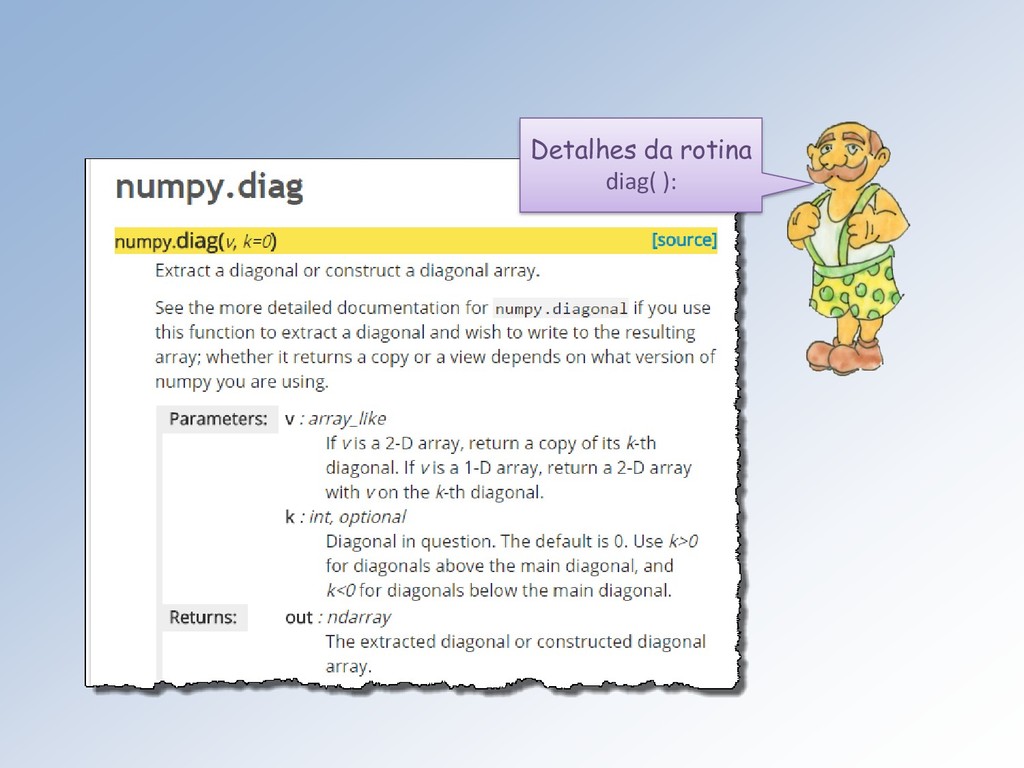
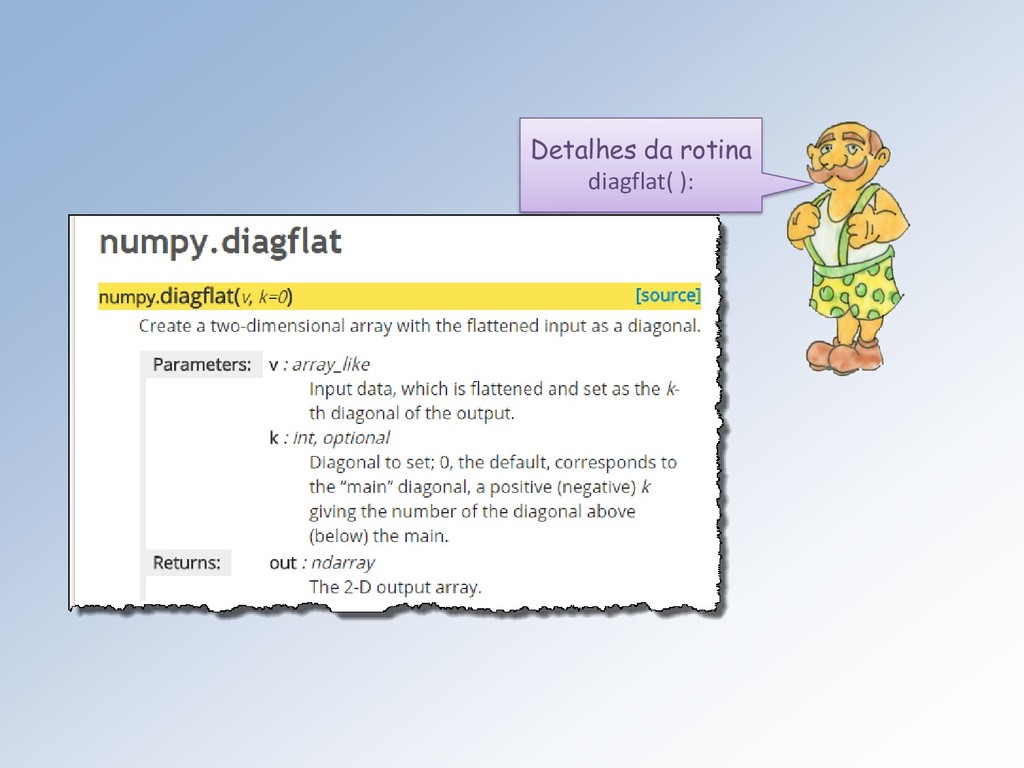
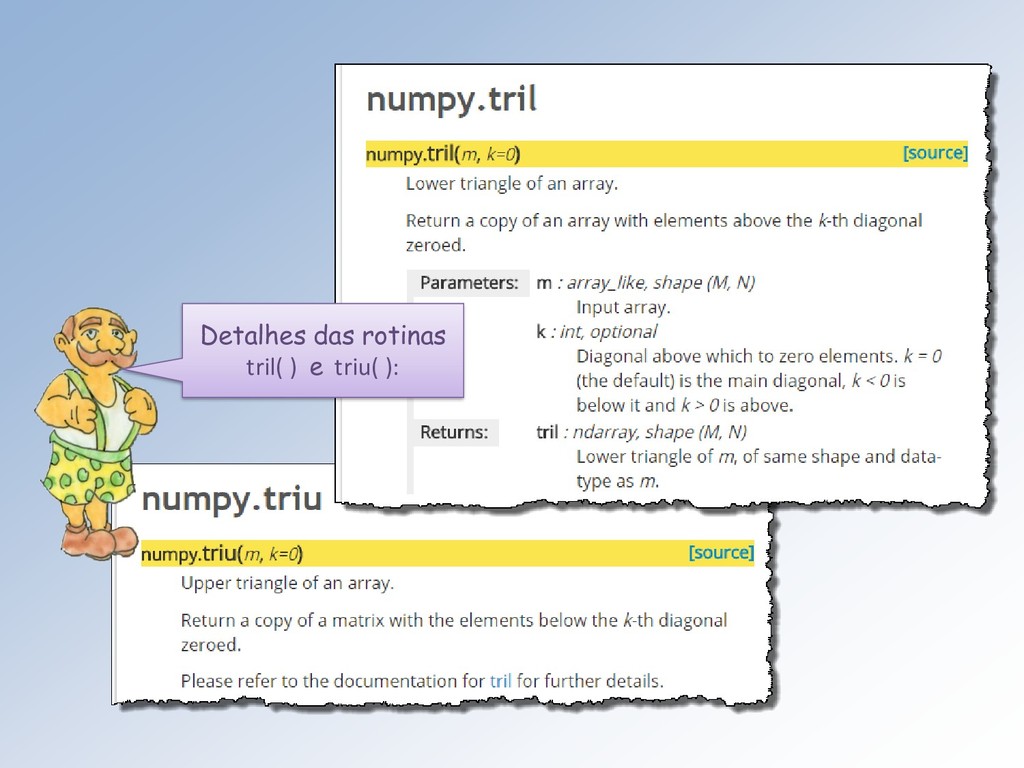
Mestre. A importância dos métodos iterativos reside em utilizar apenas os coeficientes não-nulos da matriz A, o que não acontece com as diag( ), tril( ), triu( ).
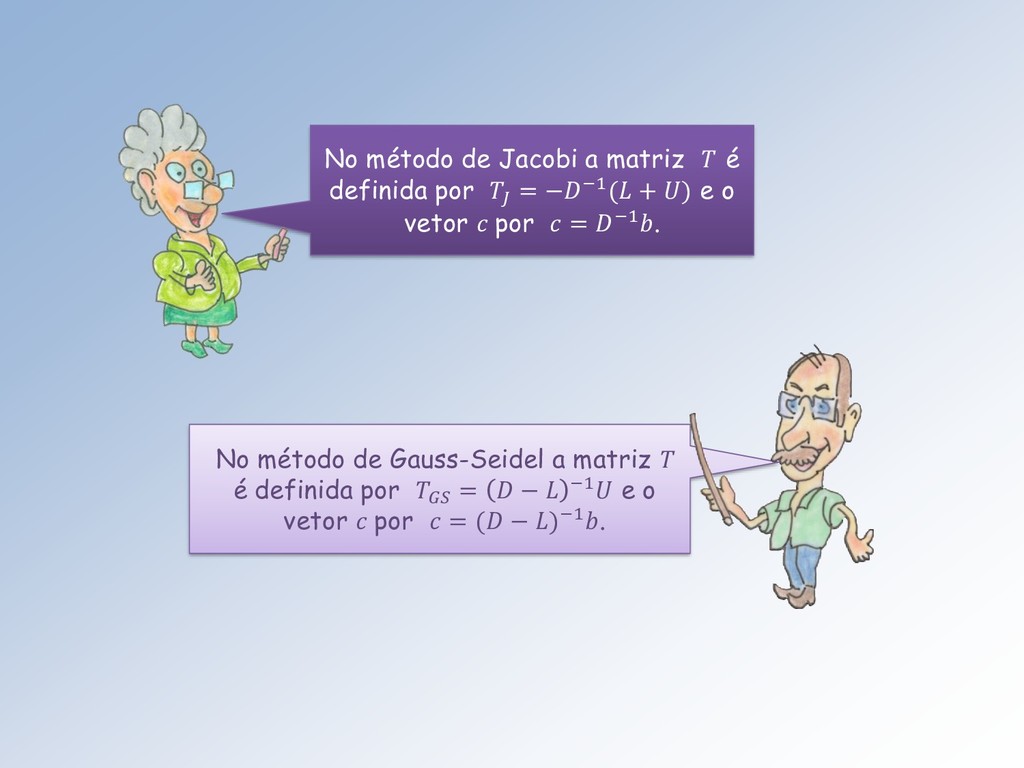
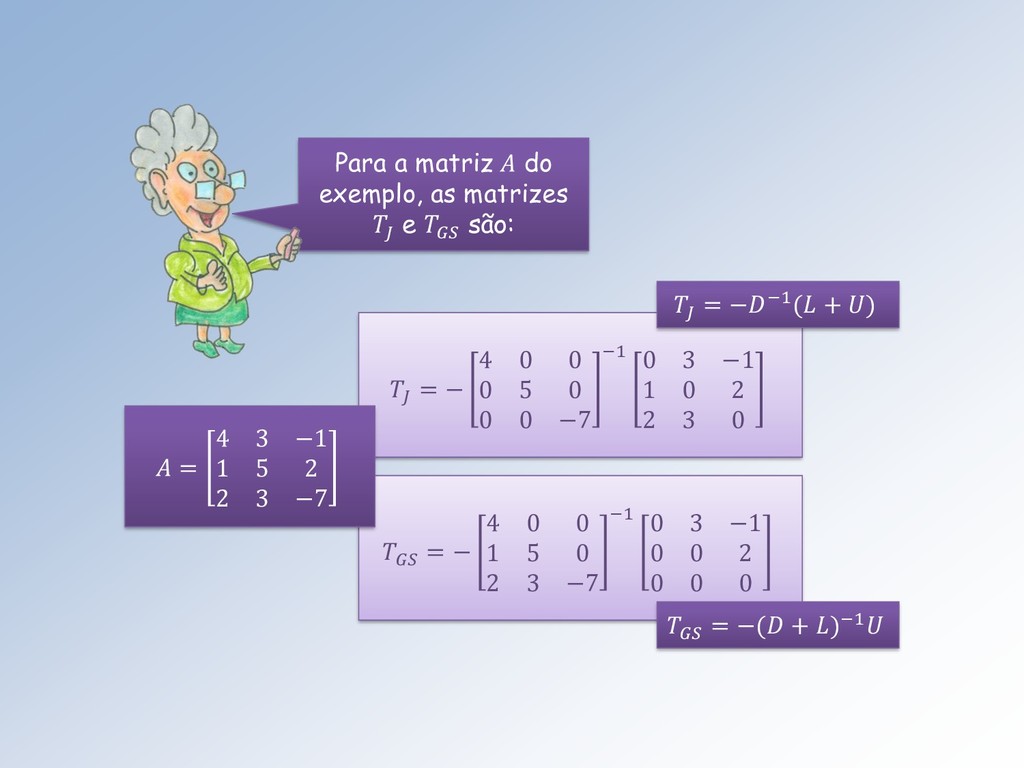
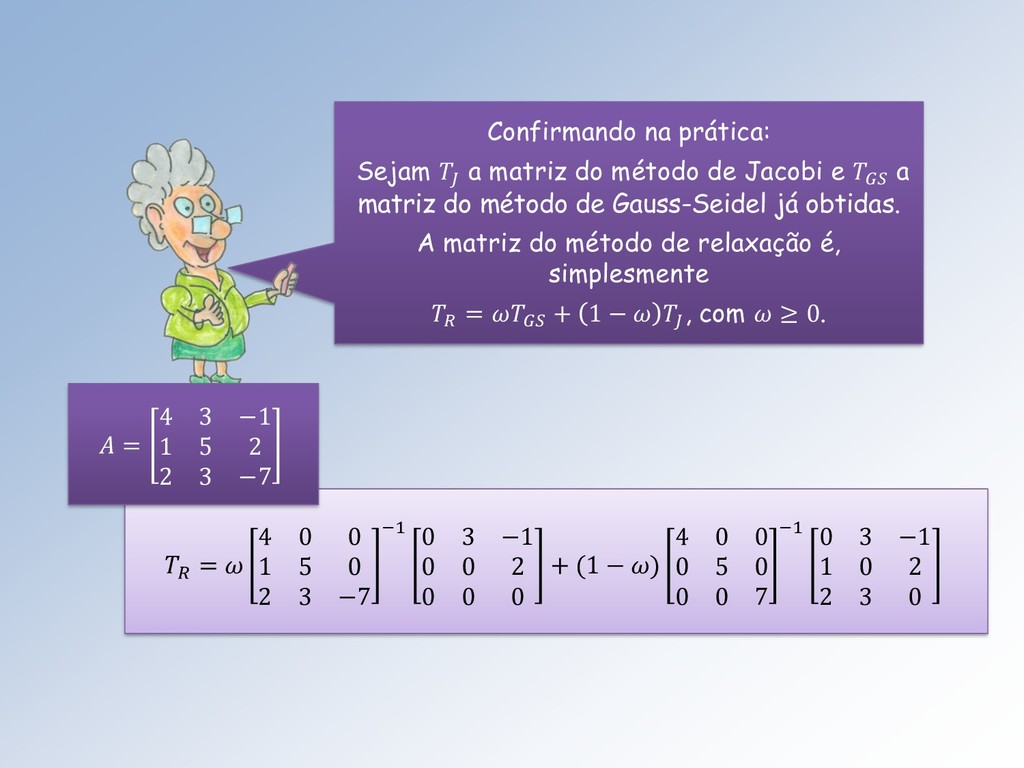
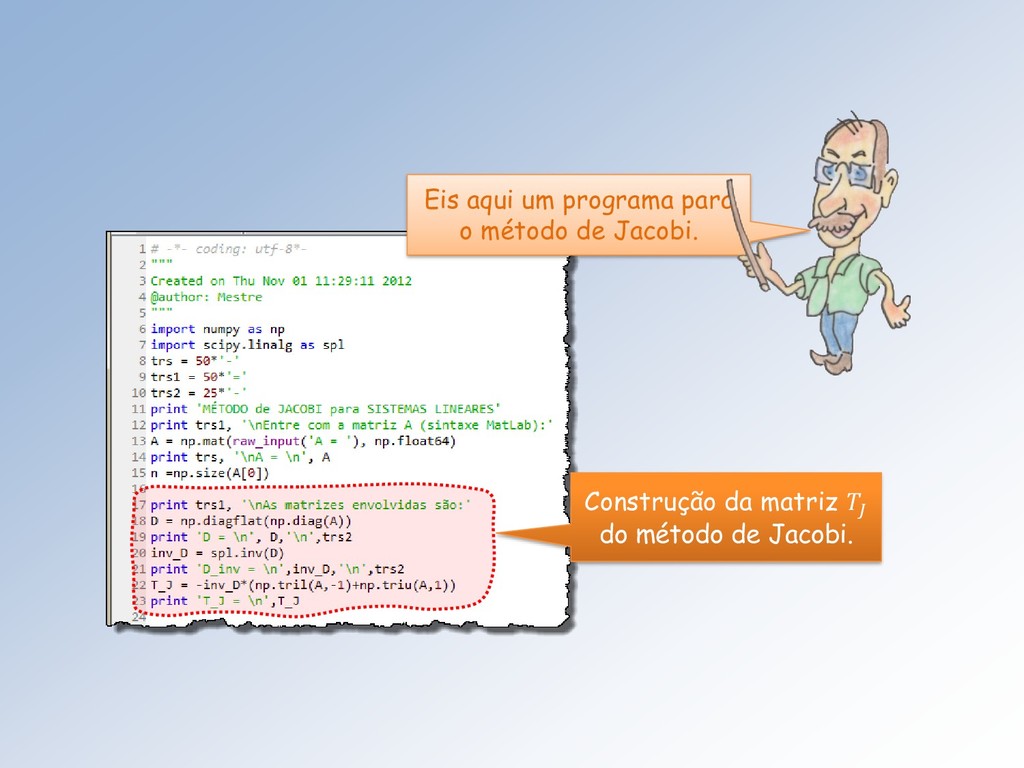
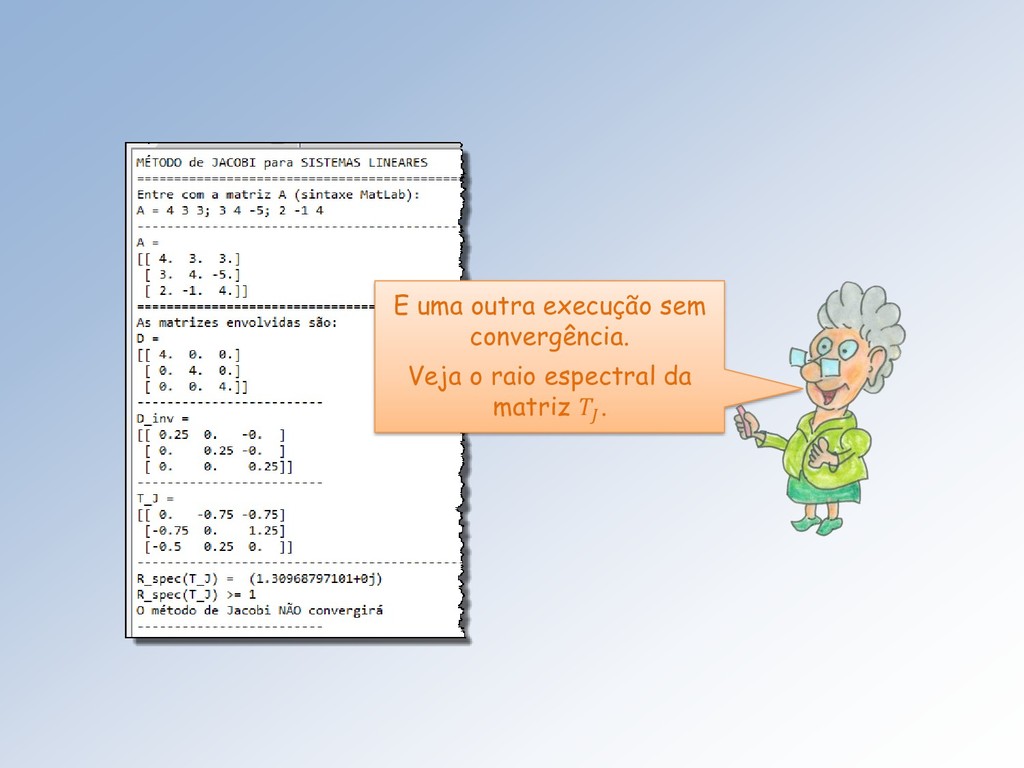
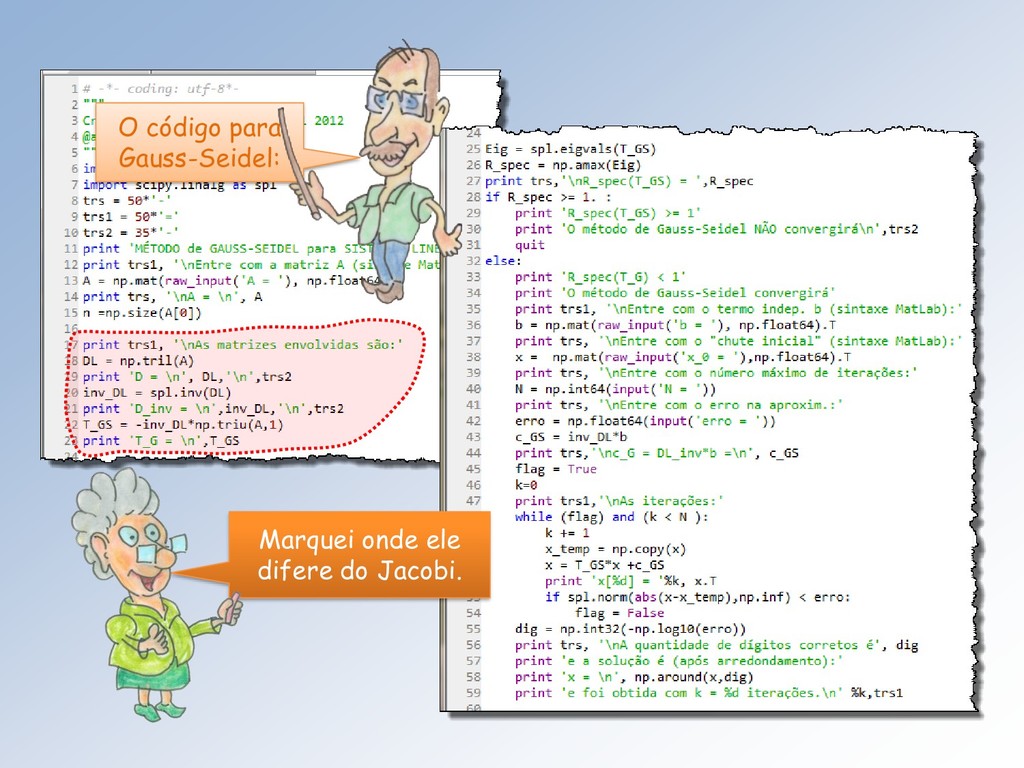
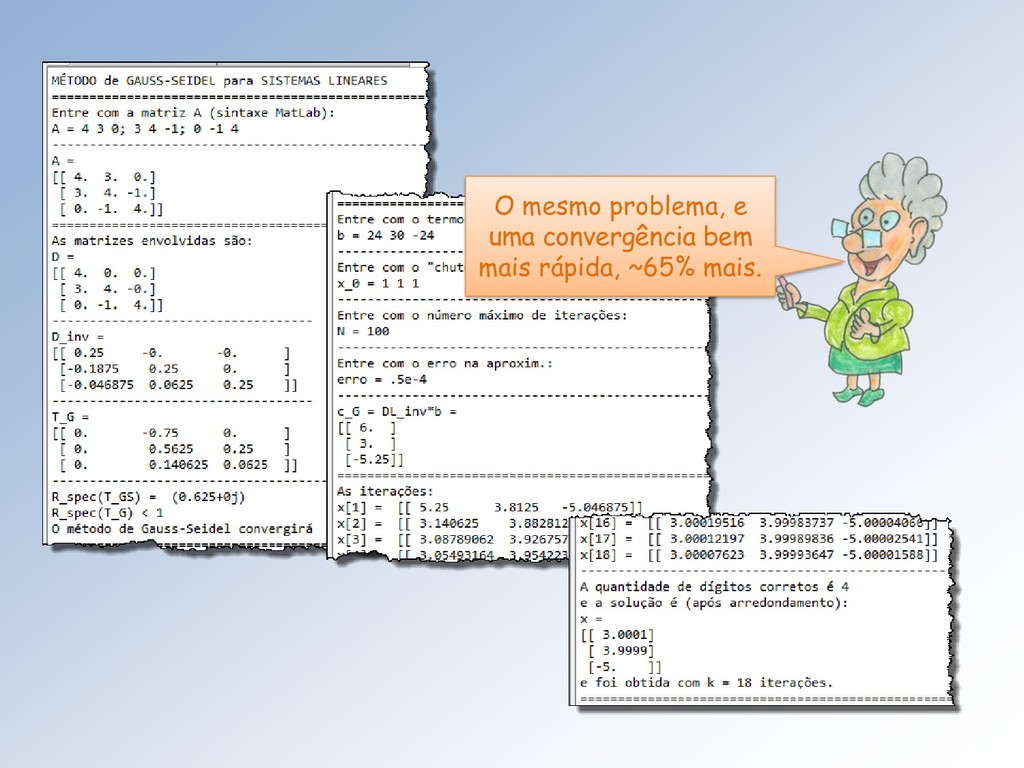
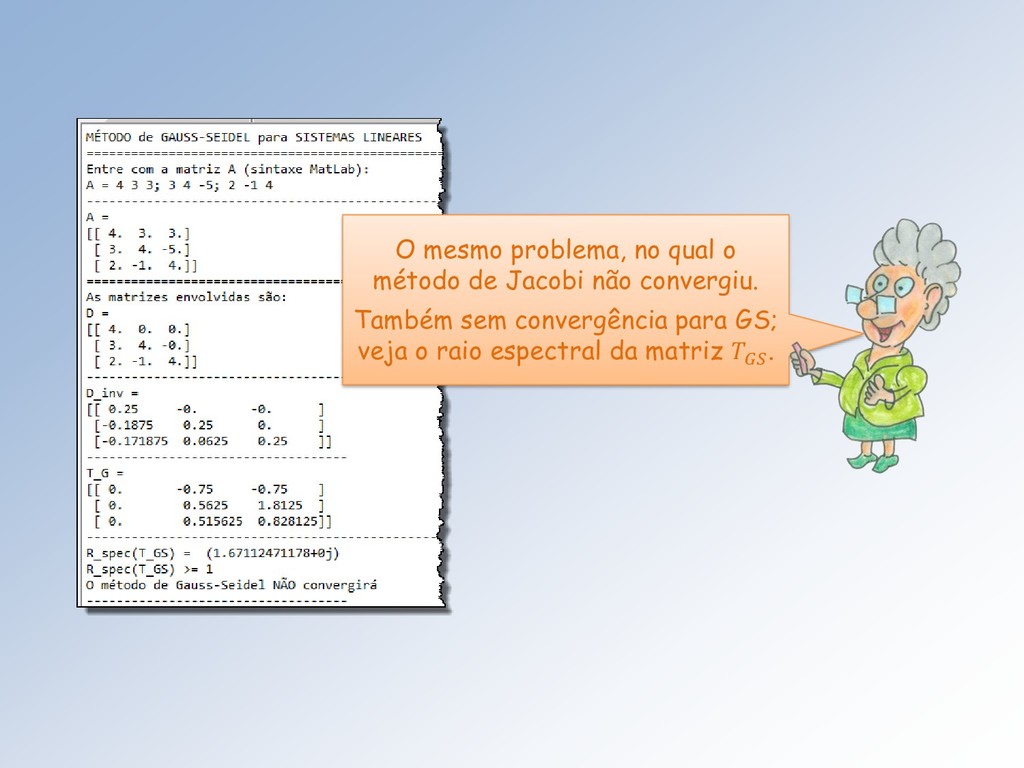
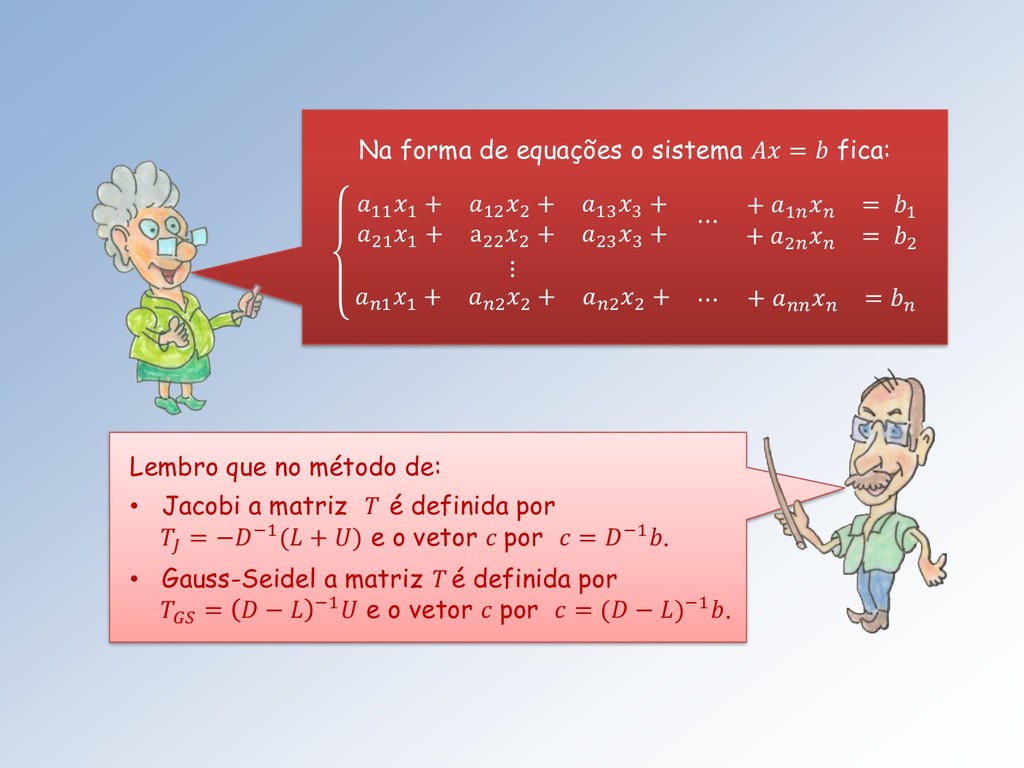
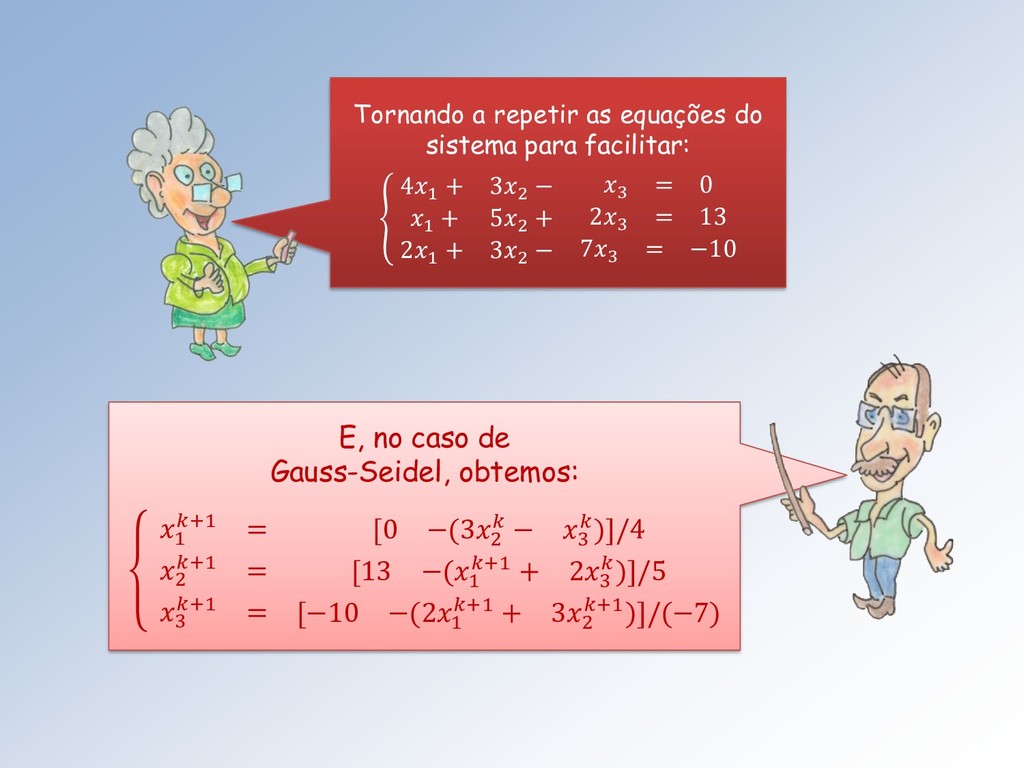
+ 21 1 + 12 2 + a22 2 + 13 3 + 23 3 + ⋯ + 1 = 1 + 2 = 2 ⋮ 1 1 + 2 2 + 2 2 + ⋯ + = Lembro que no método de: • Jacobi a matriz T é definida por = −−1( + ) e o vetor c por = −1. • Gauss-Seidel a matriz T é definida por = − −1 e o vetor c por = ( − )−1.
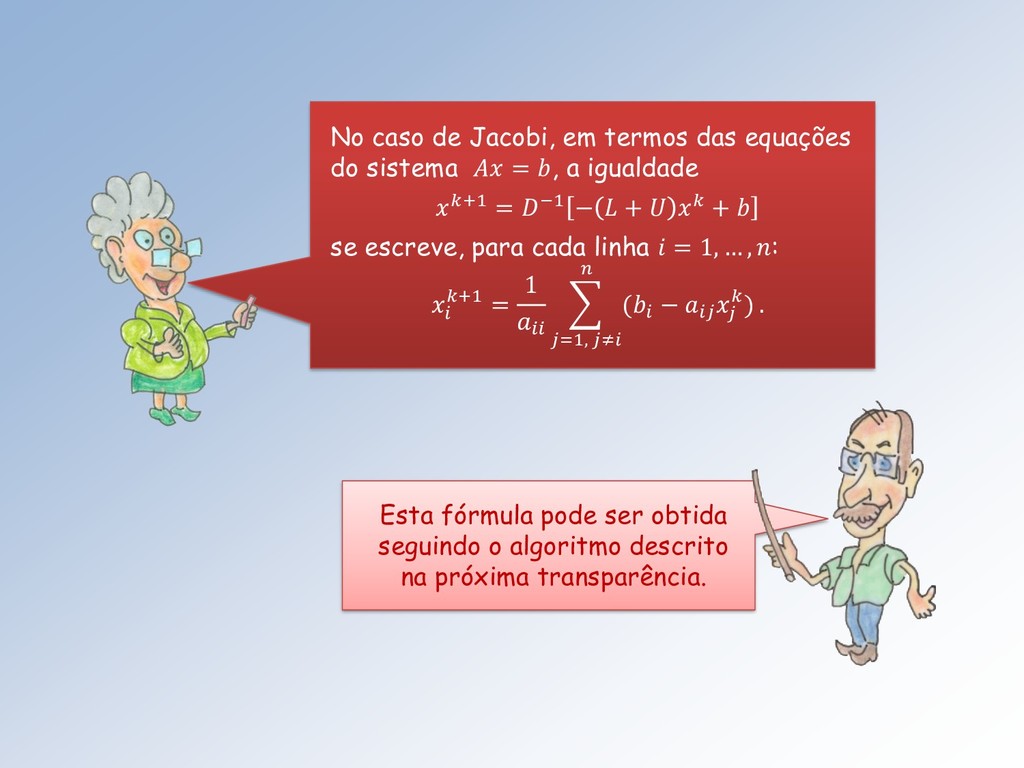
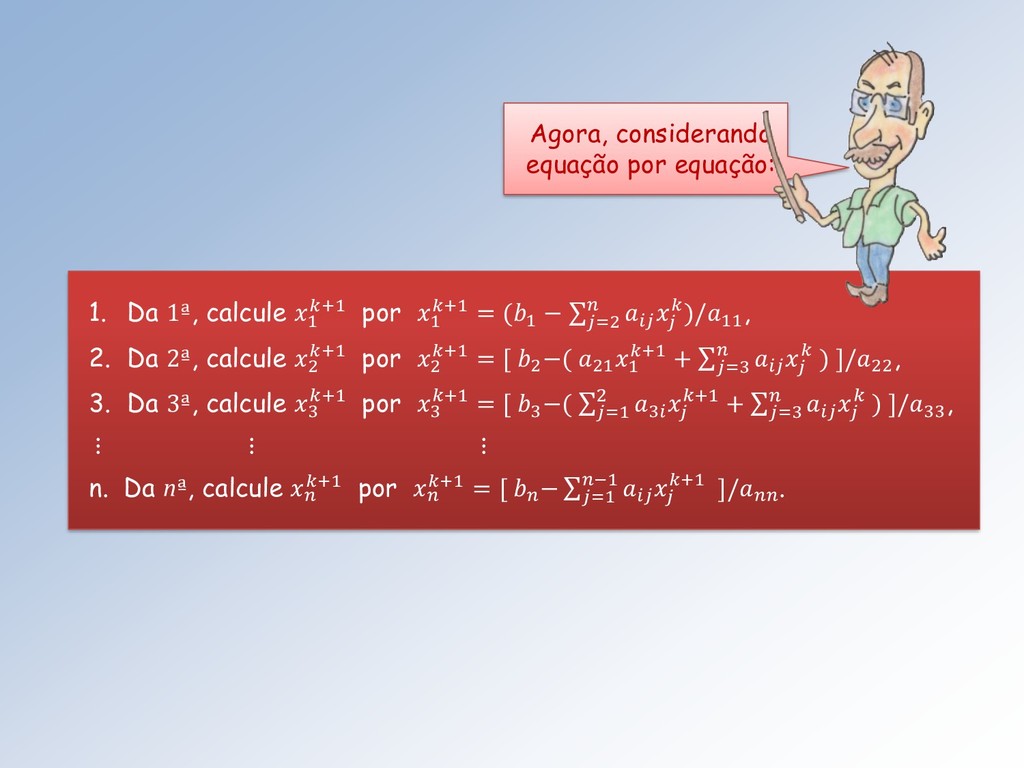
= , a igualdade +1 = −1 − + + se escreve, para cada linha = 1, … , : +1 = 1 =1, ≠ ( − ) . Esta fórmula pode ser obtida seguindo o algoritmo descrito na próxima transparência.
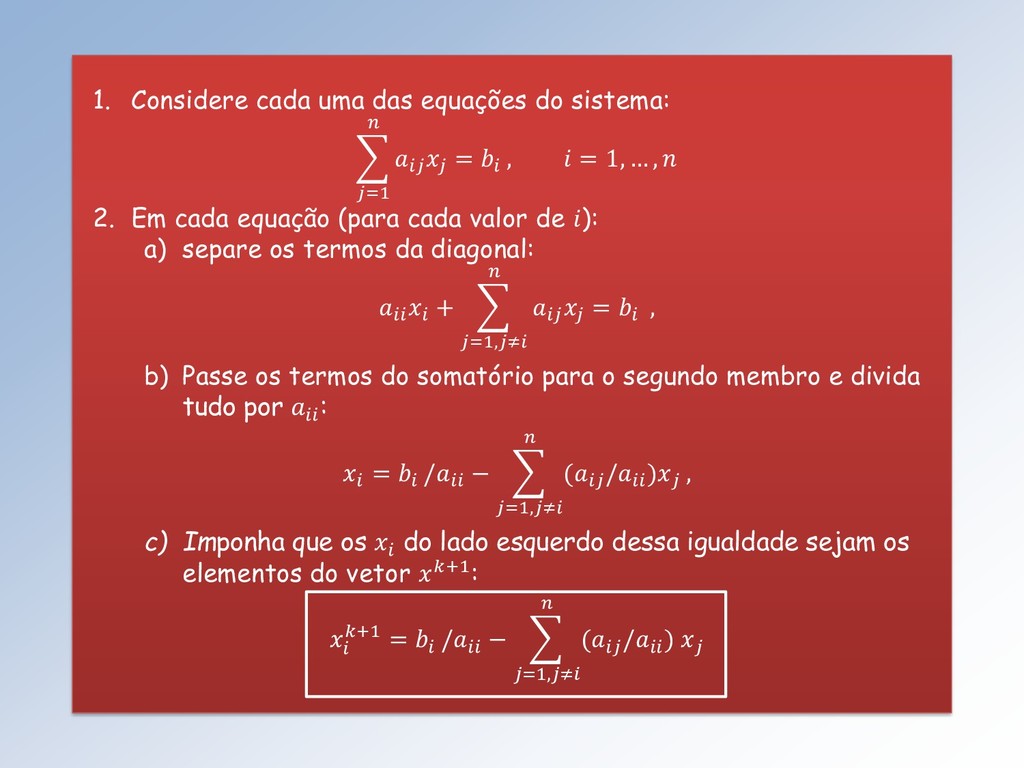
= , = 1, … , 2. Em cada equação (para cada valor de ): a) separe os termos da diagonal: + =1,≠ = , b) Passe os termos do somatório para o segundo membro e divida tudo por : = / − =1,≠ ( / ) , c) Imponha que os do lado esquerdo dessa igualdade sejam os elementos do vetor +1: +1 = / − =1,≠ ( / )
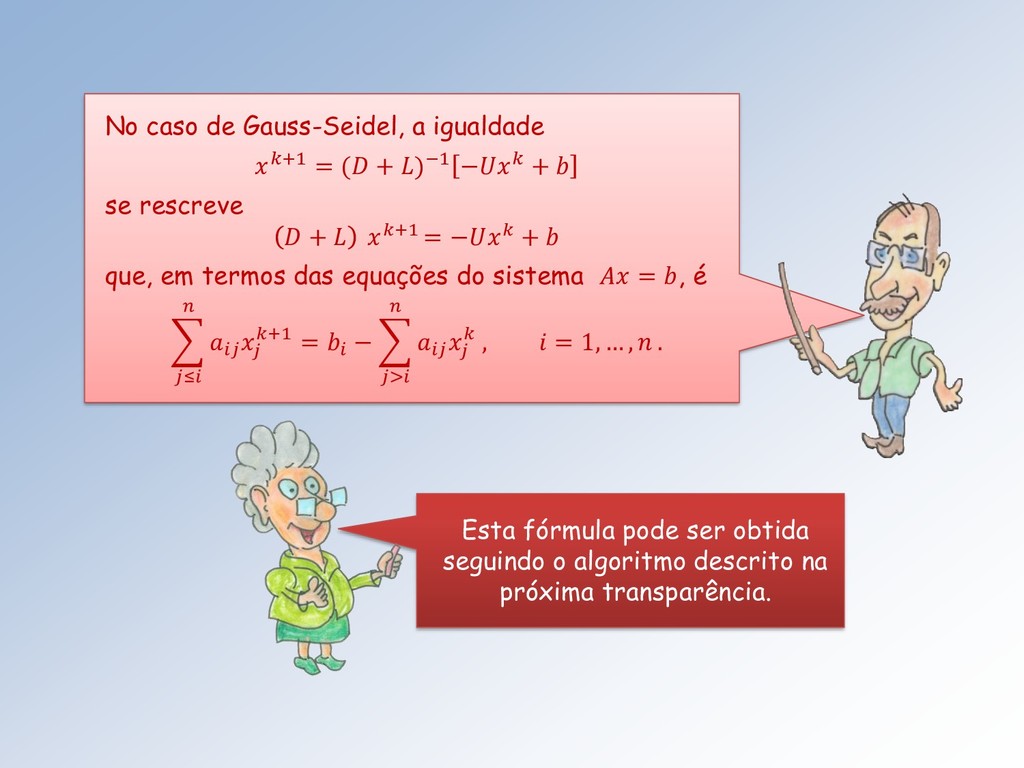
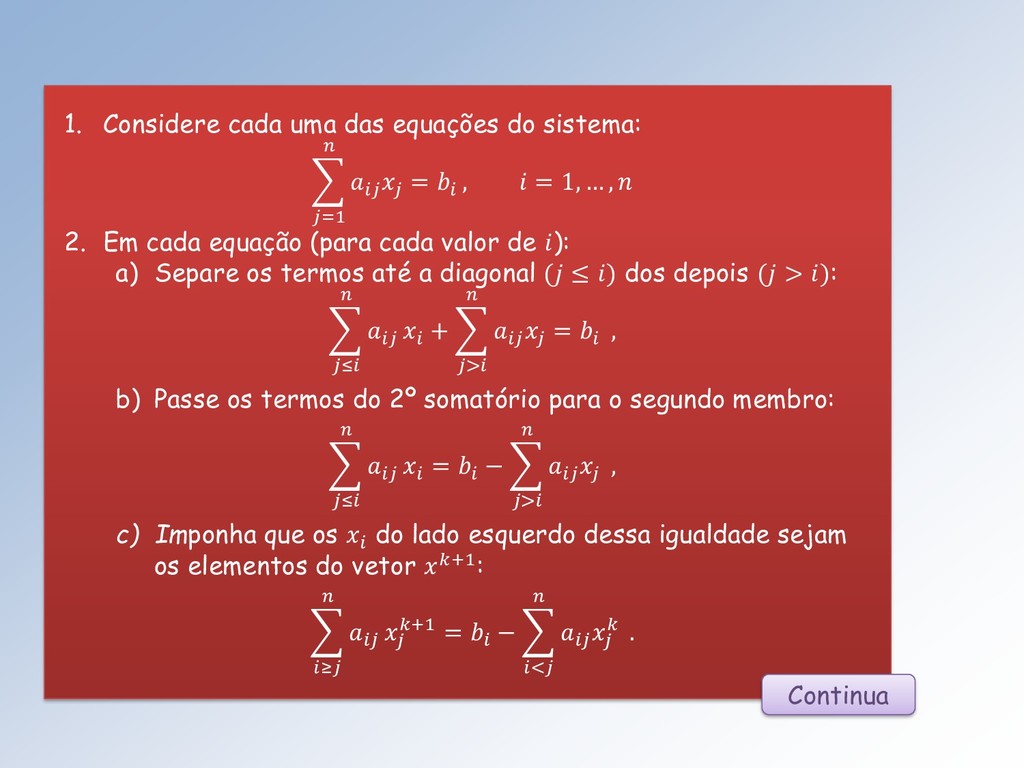
)−1 − + se rescreve + +1 = − + que, em termos das equações do sistema = , é ≤ +1 = − > , = 1, … , . Esta fórmula pode ser obtida seguindo o algoritmo descrito na próxima transparência.
= , = 1, … , 2. Em cada equação (para cada valor de ): a) Separe os termos até a diagonal ( ≤ ) dos depois ( > ): ≤ + > = , b) Passe os termos do 2º somatório para o segundo membro: ≤ = − > , c) Imponha que os do lado esquerdo dessa igualdade sejam os elementos do vetor +1: ≥ +1 = − < . Continua
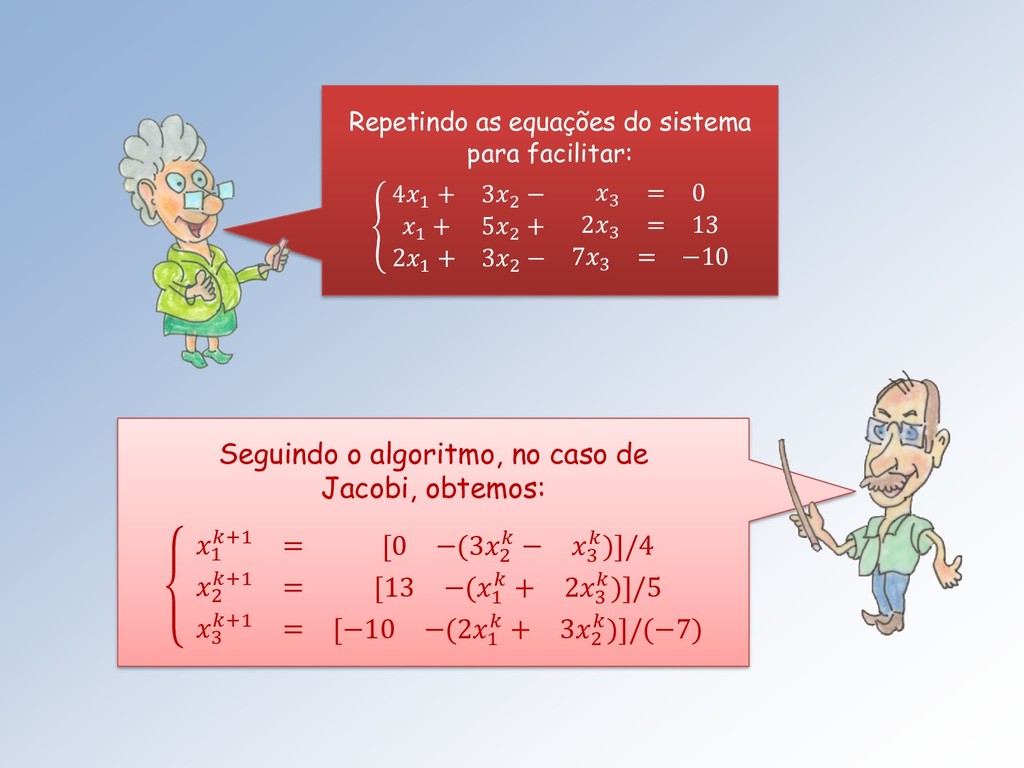
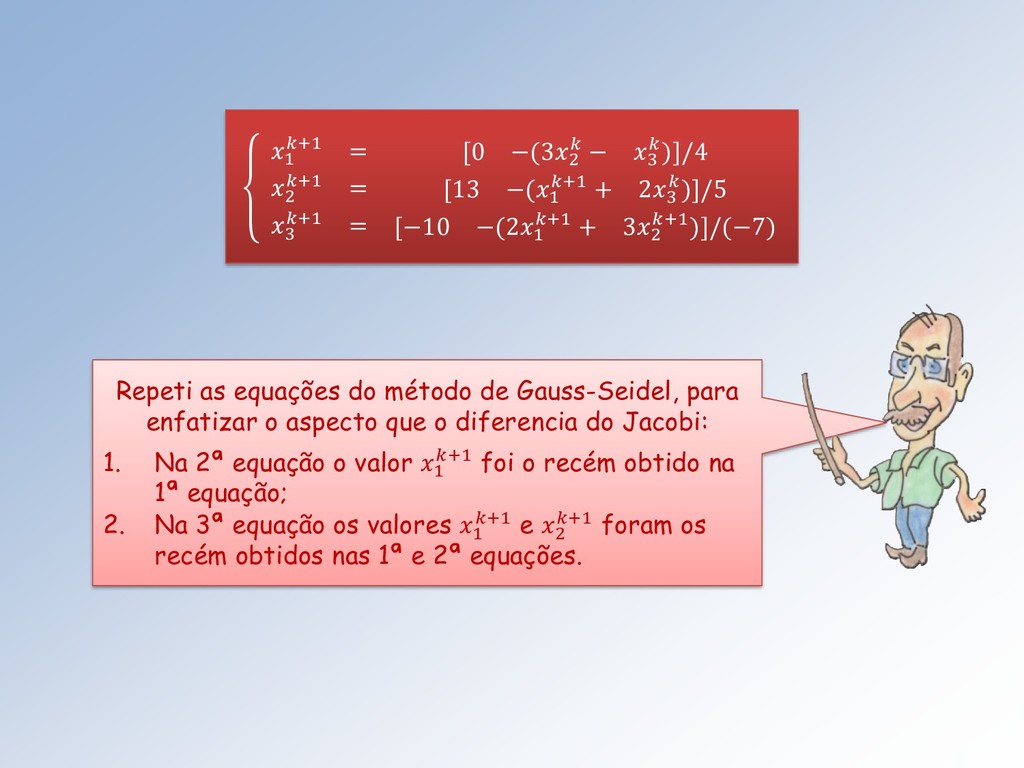
aspecto que o diferencia do Jacobi: 1. Na 2ª equação o valor 1 +1 foi o recém obtido na 1ª equação; 2. Na 3ª equação os valores 1 +1 e 2 +1 foram os recém obtidos nas 1ª e 2ª equações. 1 +1 = [0 −(32 − 3 )]/4 2 +1 = [13 −(1 +1 + 23 )]/5 3 +1 = [−10 −(21 +1 + 32 +1)]/(−7)
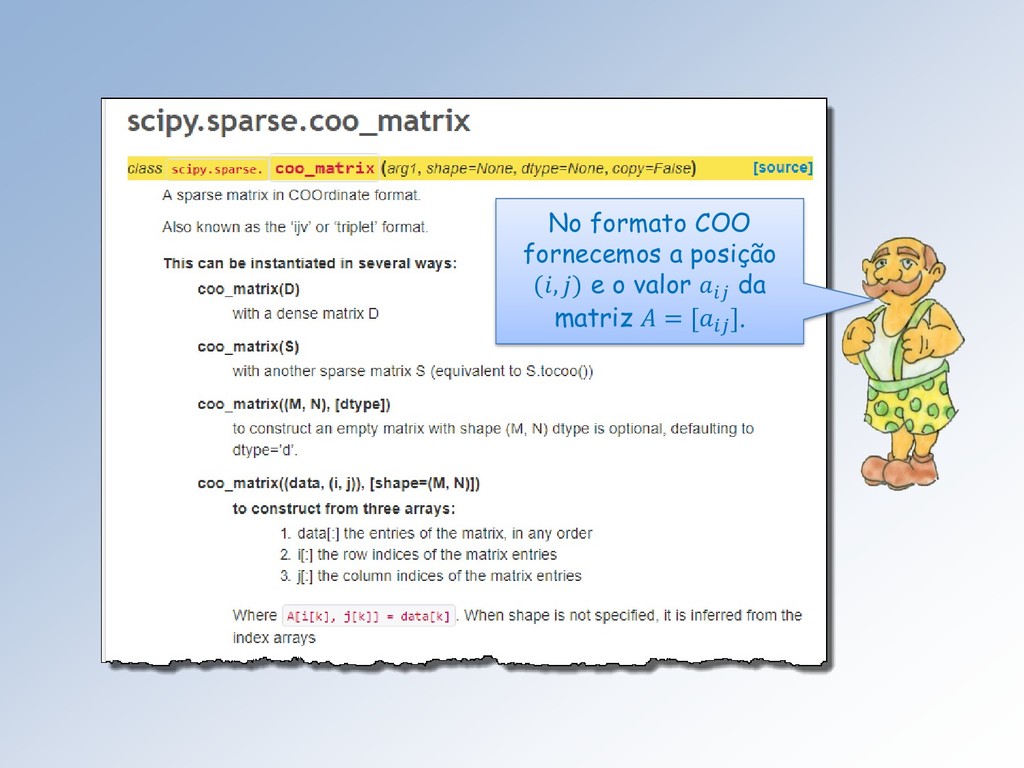
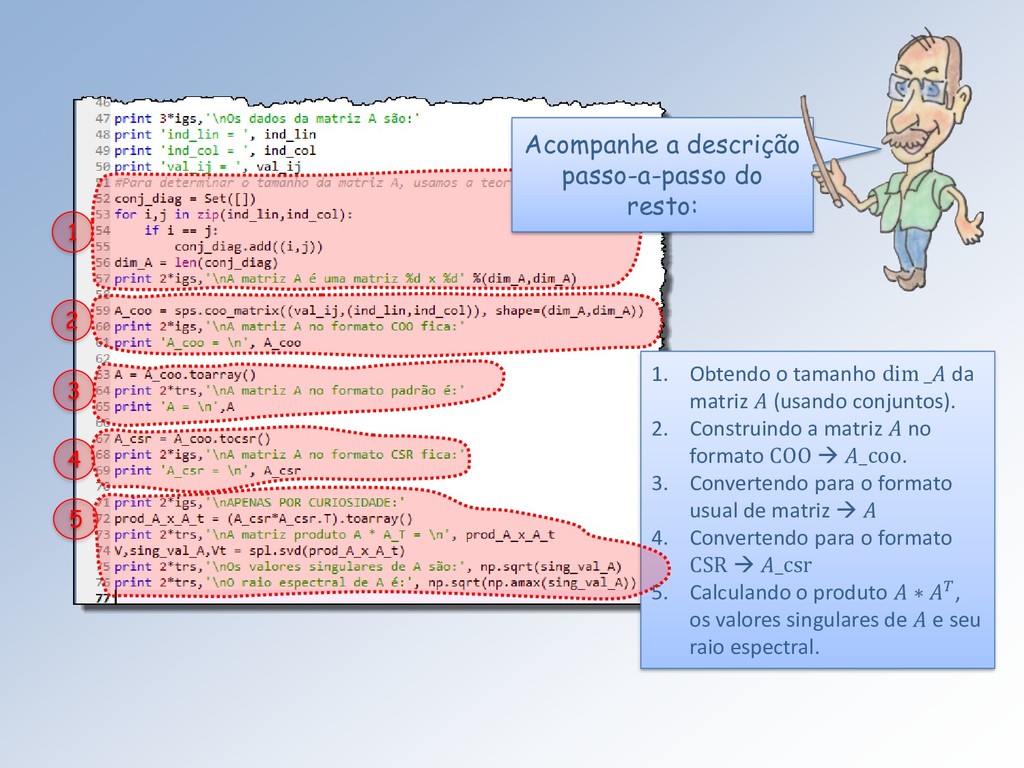
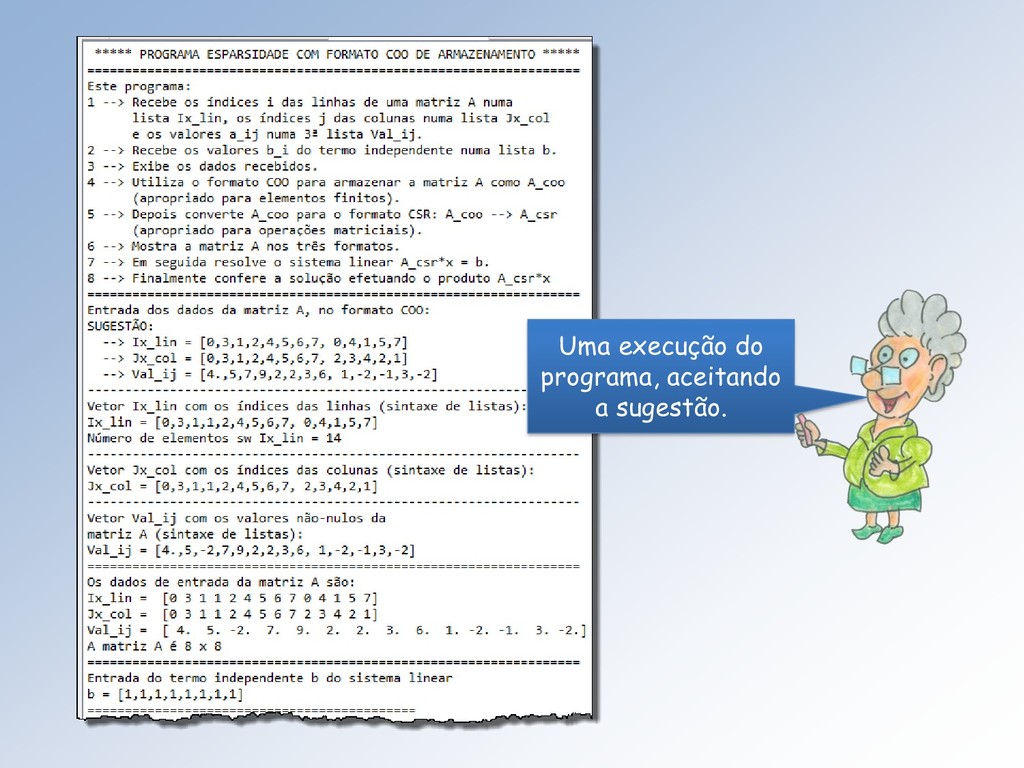
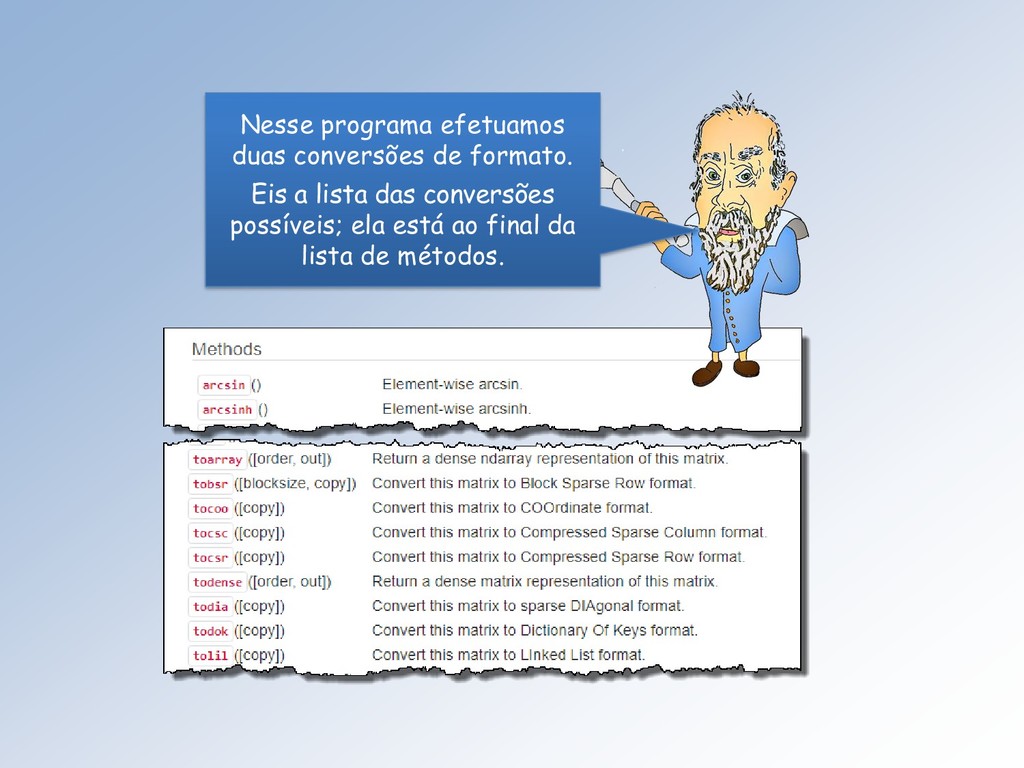
para o formato tradicional como para o CSR, mais apropriado para operações algébricas. Sim Mestre, faça um programa envolvendo a criação de uma matriz já no formato COO.
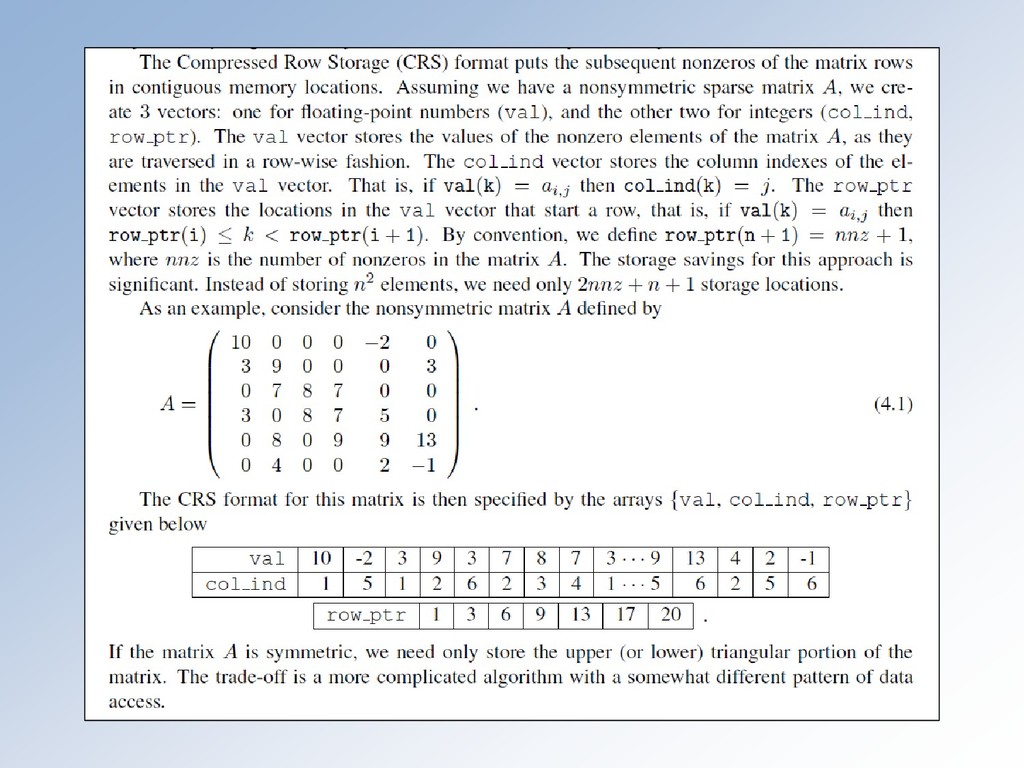
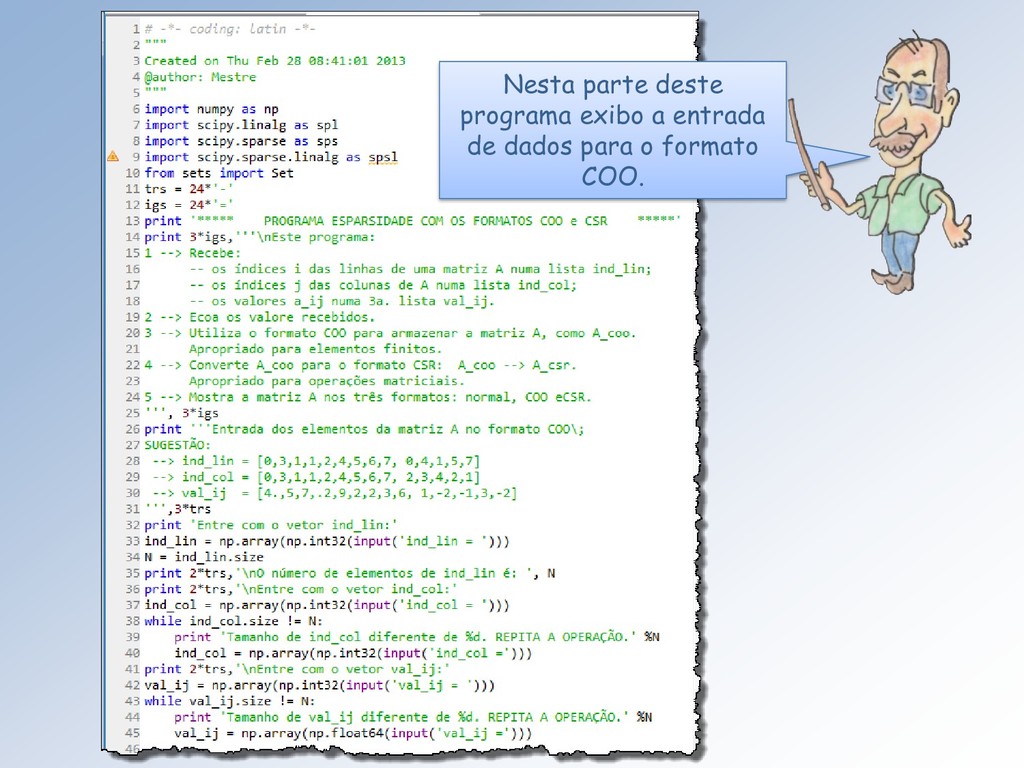
matriz (usando conjuntos). 2. Construindo a matriz no formato COO → _coo. 3. Convertendo para o formato usual de matriz → 4. Convertendo para o formato CSR → _csr 5. Calculando o produto ∗ , os valores singulares de e seu raio espectral. 1 5 Acompanhe a descrição passo-a-passo do resto:
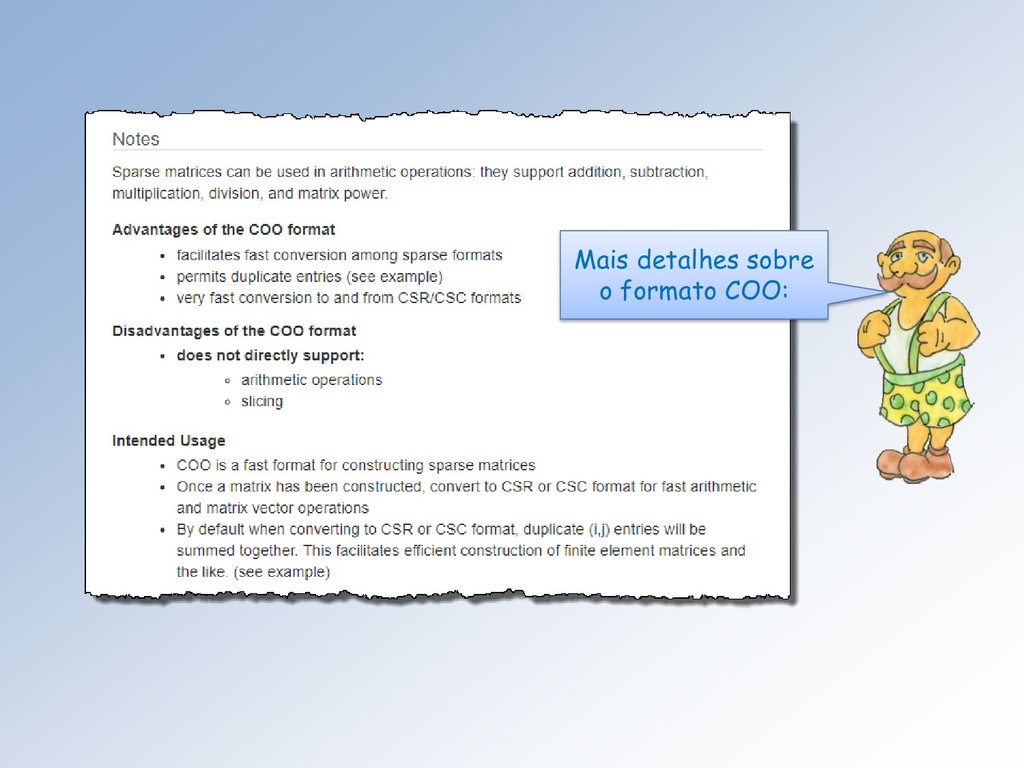
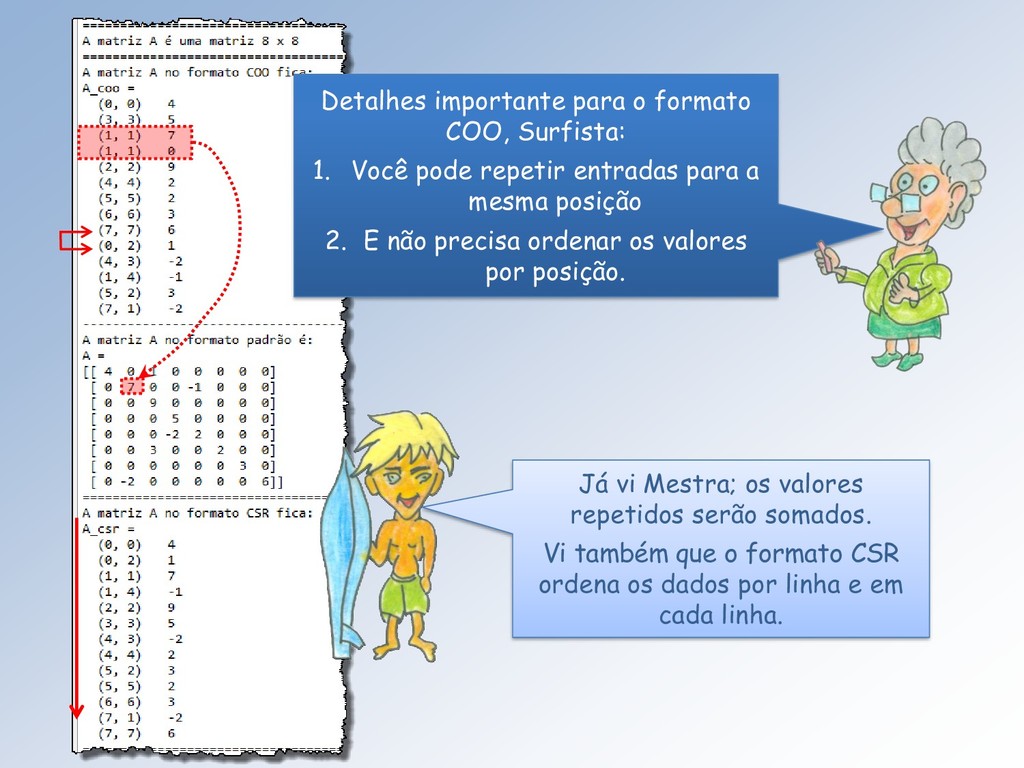
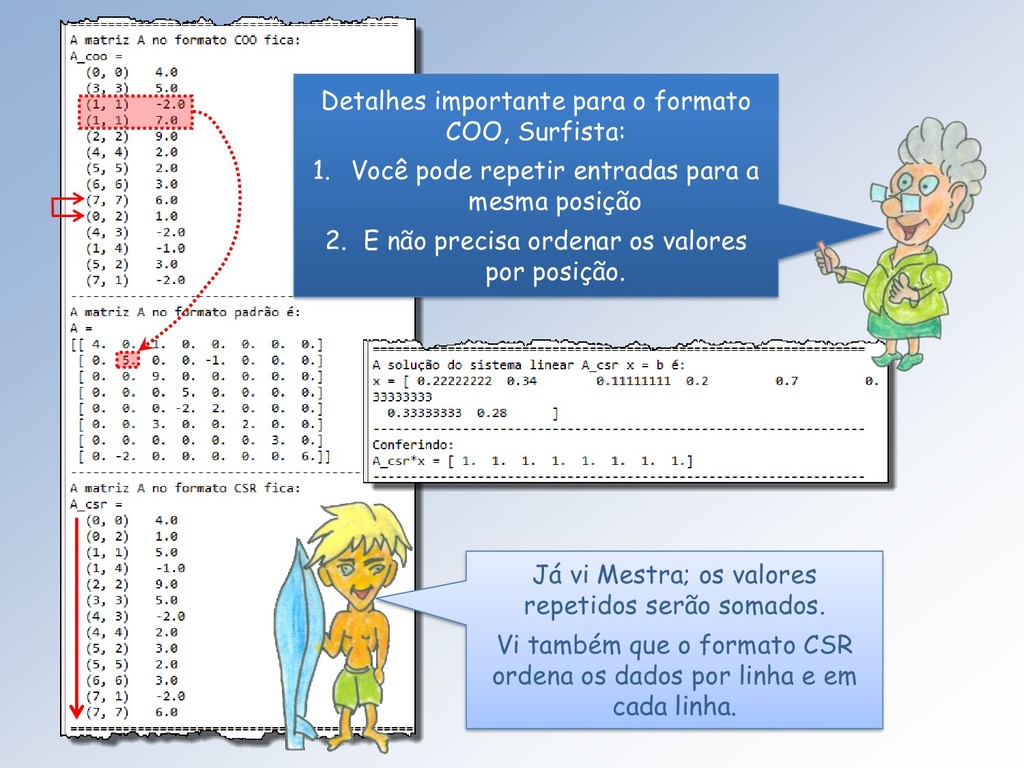
repetir entradas para a mesma posição 2. E não precisa ordenar os valores por posição. Já vi Mestra; os valores repetidos serão somados. Vi também que o formato CSR ordena os dados por linha e em cada linha.
repetir entradas para a mesma posição 2. E não precisa ordenar os valores por posição. Já vi Mestra; os valores repetidos serão somados. Vi também que o formato CSR ordena os dados por linha e em cada linha.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Se: 1. ∈ [, ], 2. , ⊆ [, ],](https://files.speakerdeck.com/presentations/f6e84517cb4547ed87cb0a4eb218475f/slide_26.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}