. Basta garantir as quatro propriedades relacionadas pelo Galileu. Já conferimos que o conjunto ℳ× das matrizes × com a adição de matrizes e a multiplicação por fator de escala é um espaço vetorial.
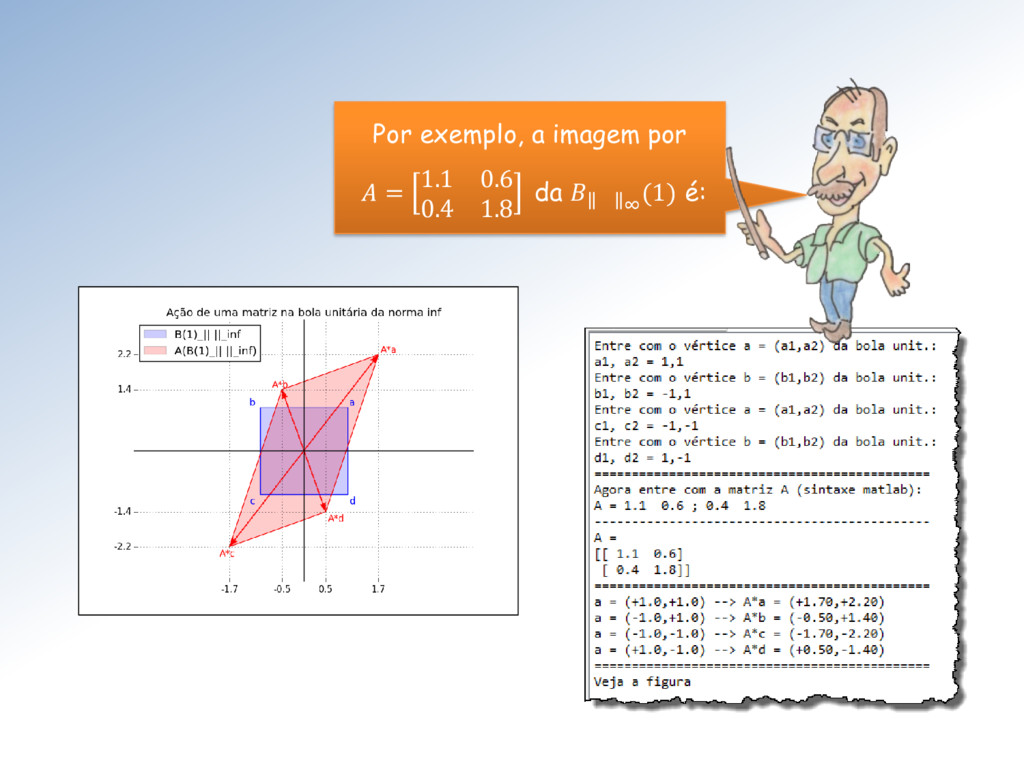
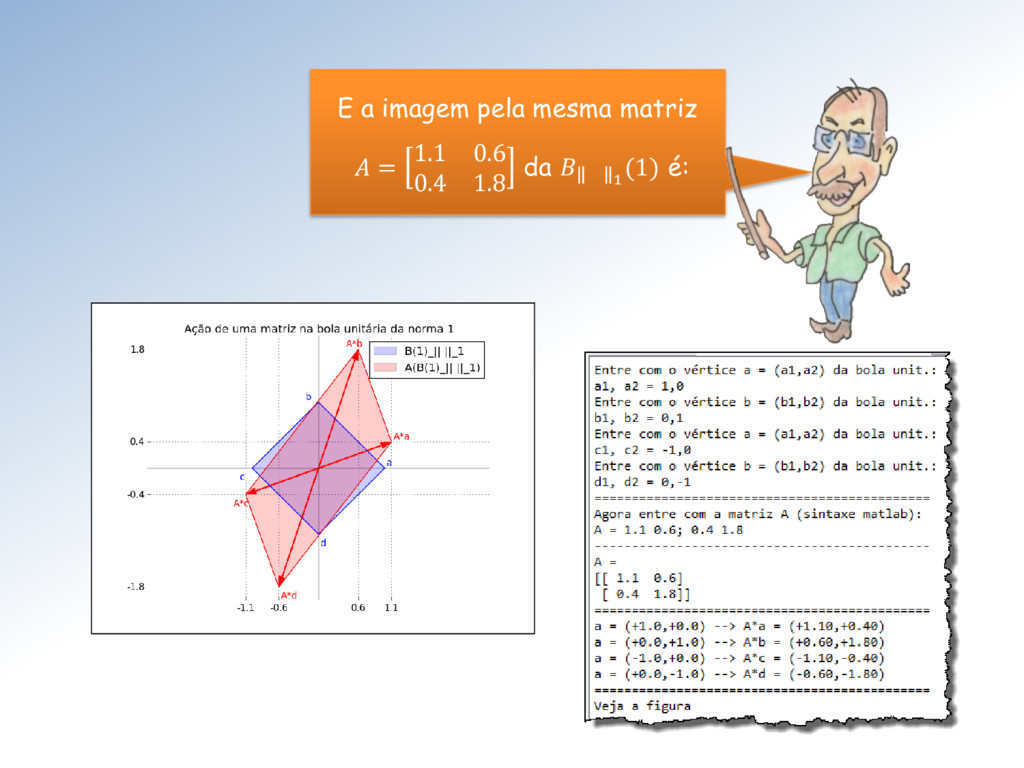
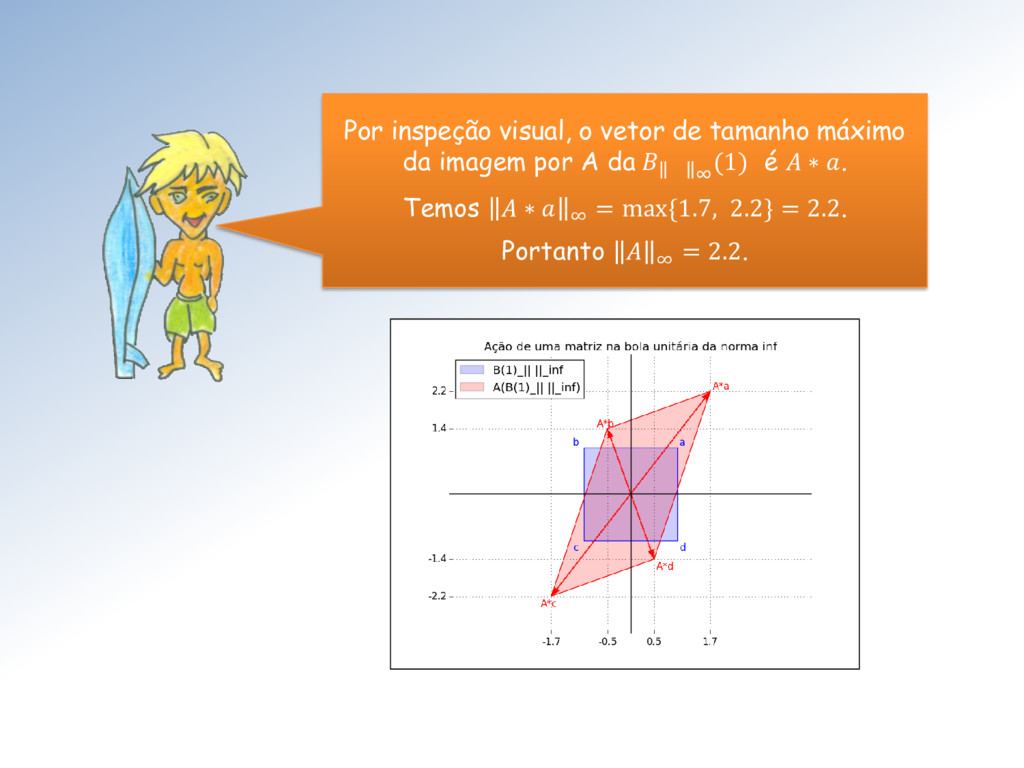
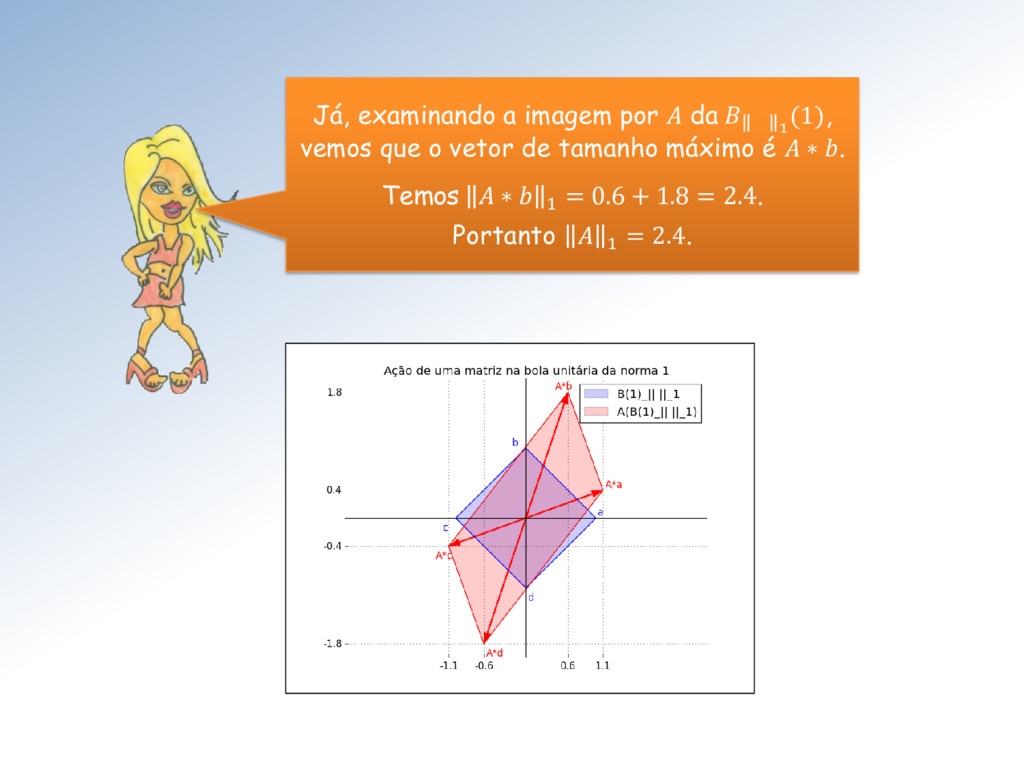
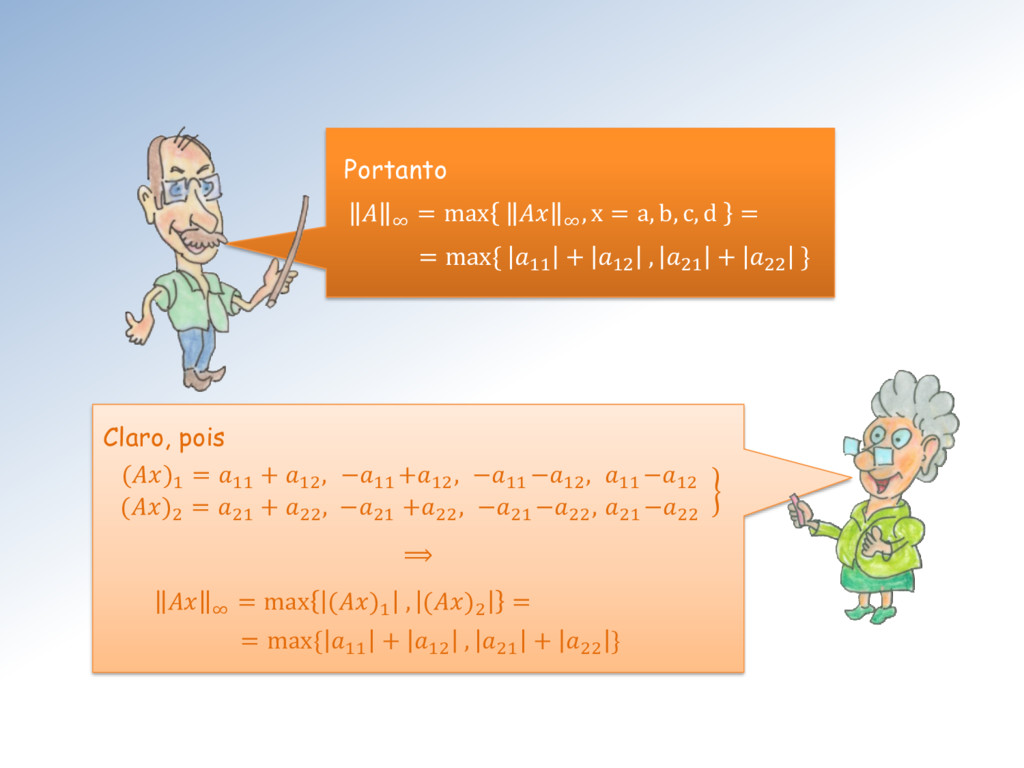
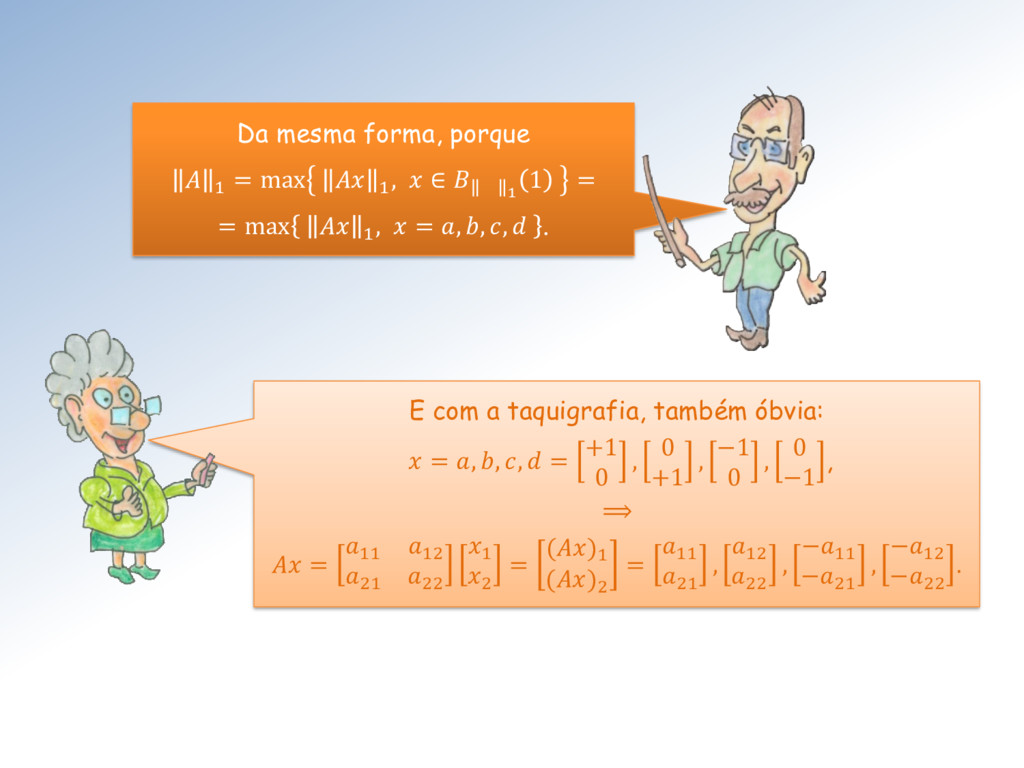
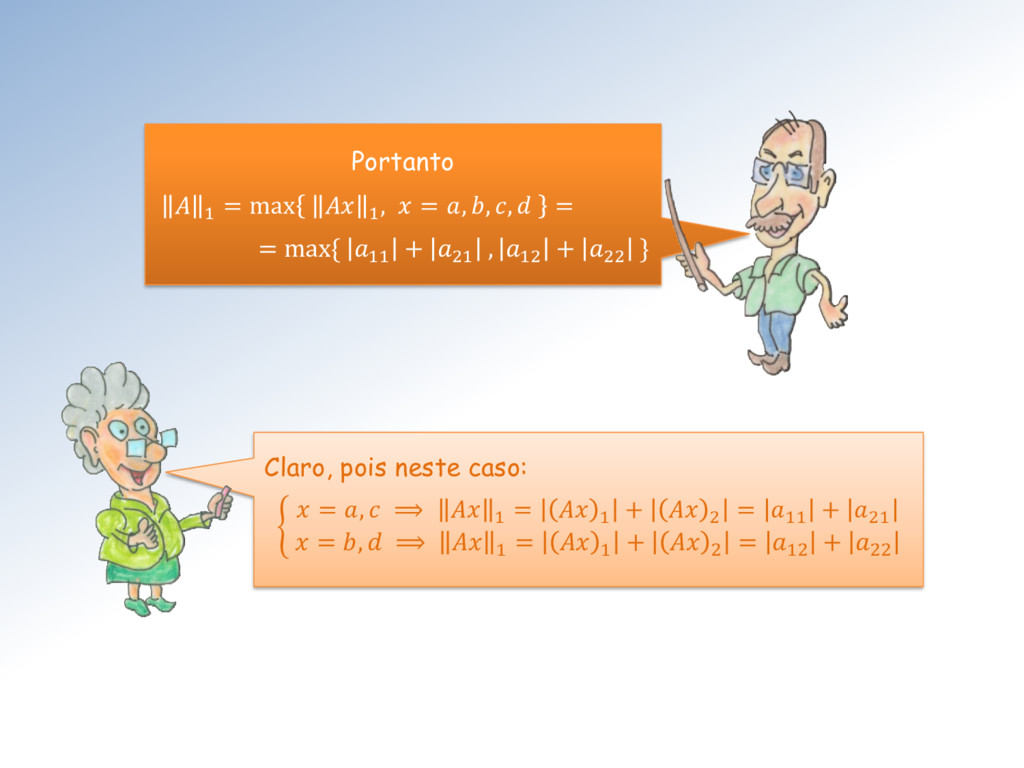
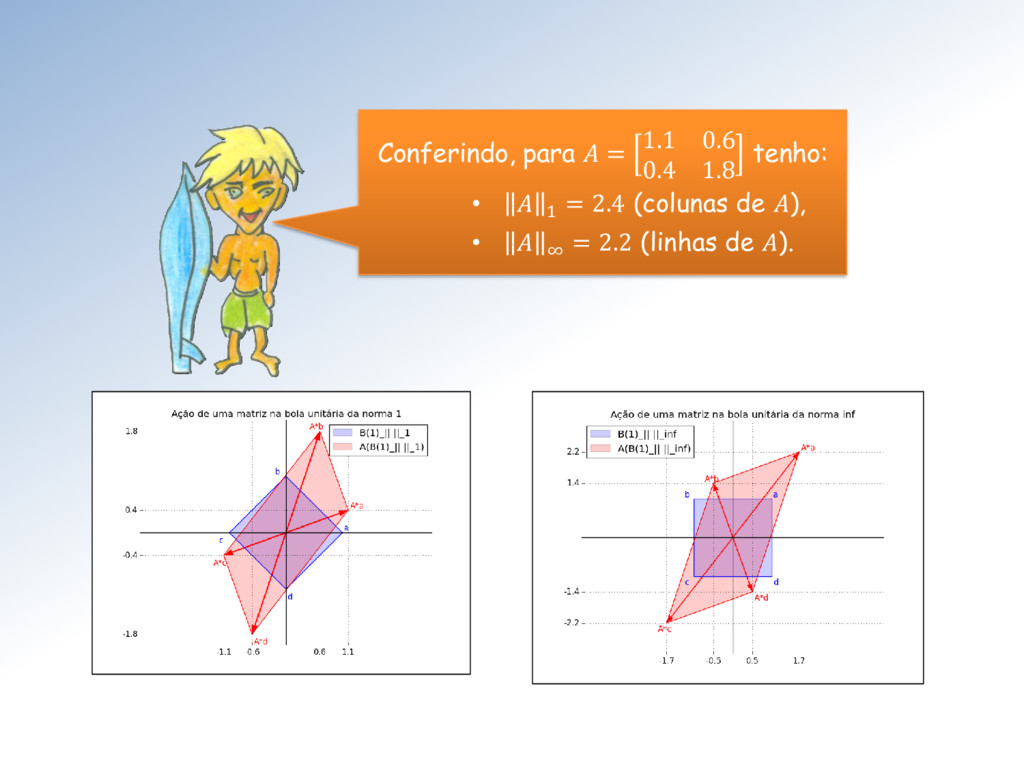
= max{ 11 + 21 , 12 + 22 } • ∞ = max{ 11 + 12 , 21 + 22 } Por esses dois resultados: • 1 é referida como norma (...) das colunas de e • ∞ como norma (...) das linhas de . (...) = (do máximo da soma dos valores absolutos)
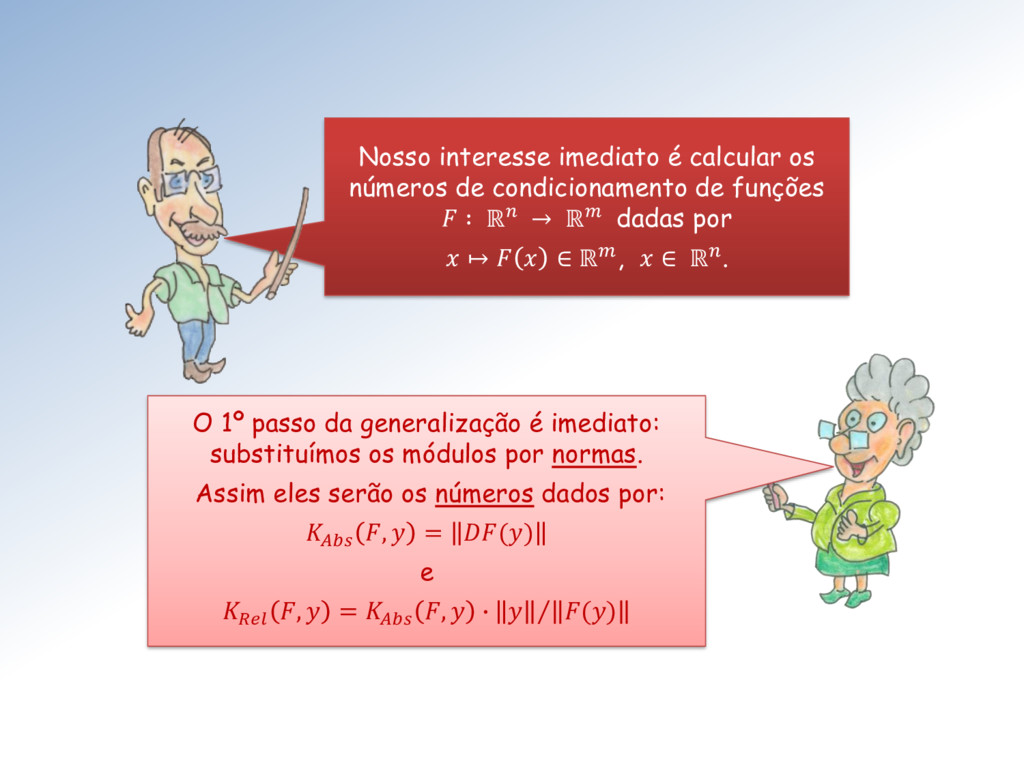
funções ∶ ℝ → ℝ dadas por ↦ ∈ ℝ, ∈ ℝ. O 1º passo da generalização é imediato: substituímos os módulos por normas. Assim eles serão os números dados por: , = () e , = , ∙ Τ ()
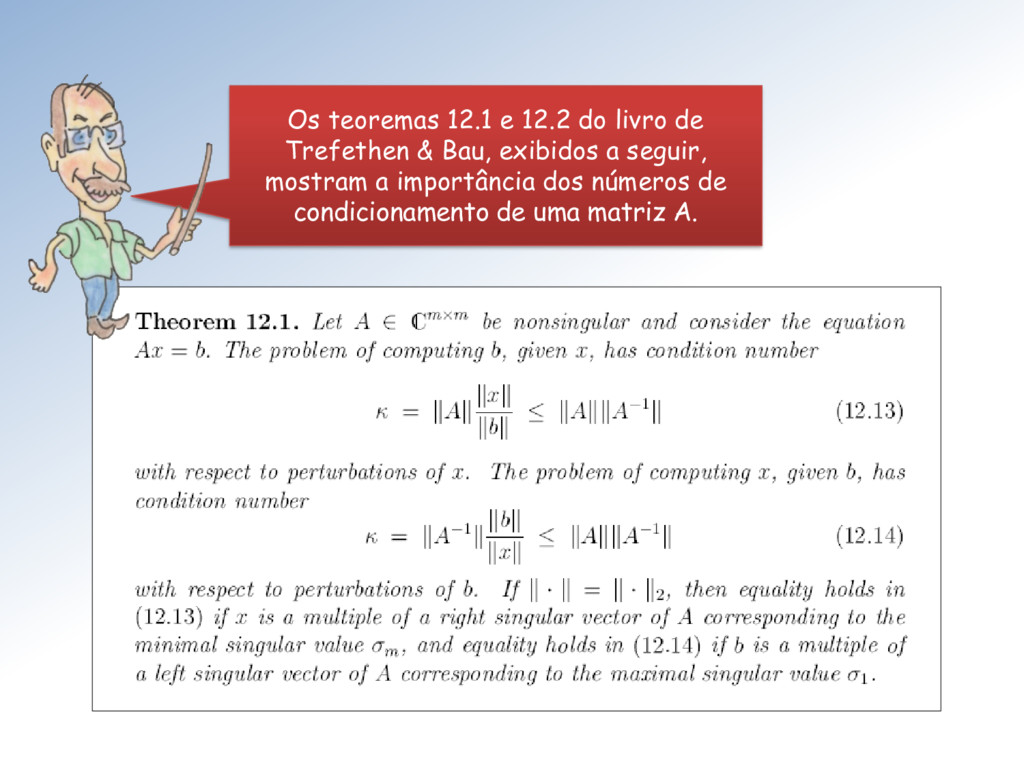
= é dada por = −1. Assim, a função é : ↦ = −1. Brilhante Cabelos de Fogo. O número de condicionamento para o problema da resolução de sistemas lineares é, portanto , = −1 .
= é = , = −1 ∙ Portanto os números de condicionamento absoluto e relativo para sistemas lineares = dependem apenas da matriz (e da −1): • = , = , • = , = ∙ −1 .
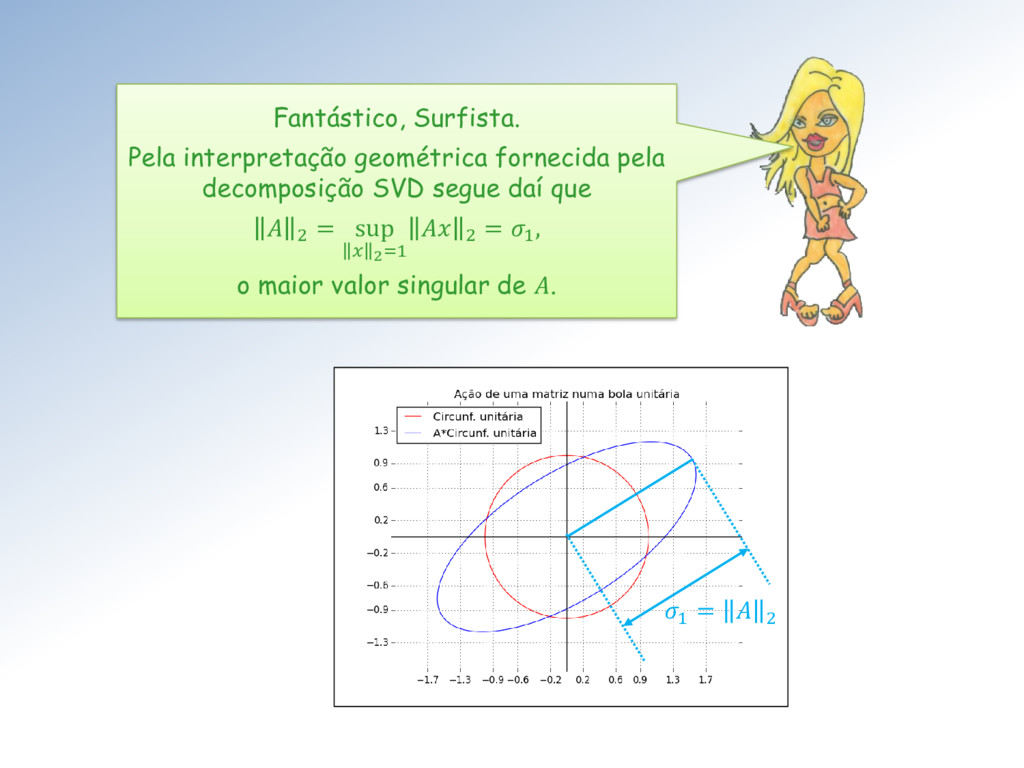
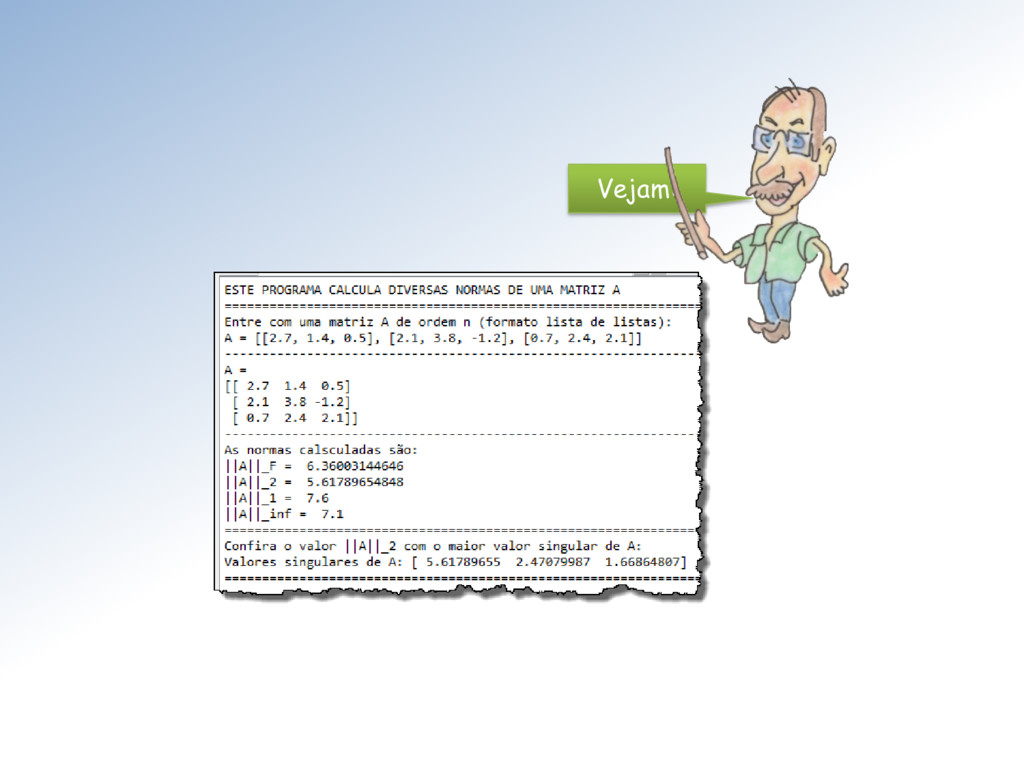
singular de A , • −1 2 = Τ 1 - o menor valor singular de A . Assim = Τ Em outras palavras = Τ , é a excentricidade do hiper-elipse que é a imagem por A da circunferência unitária.
de fatoração LU? Antes do Mestre te responder, jovem, proponho que discuta com seus colegas sobre essa cultura de levar vantagem em tudo. Grande Filósofo!
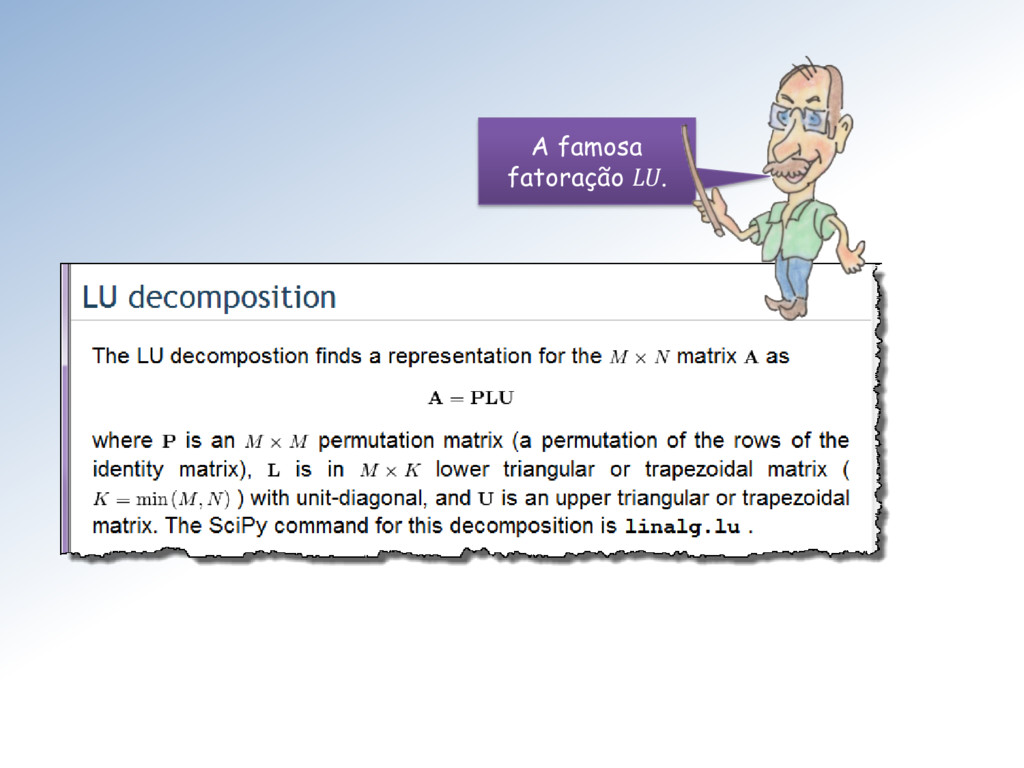
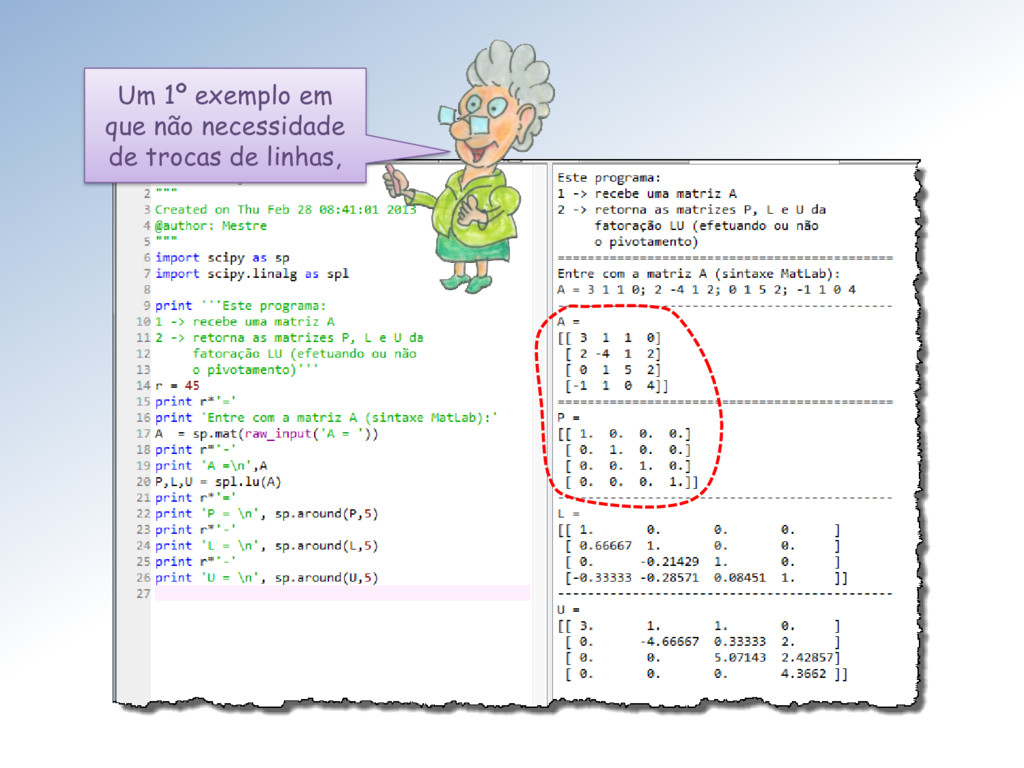
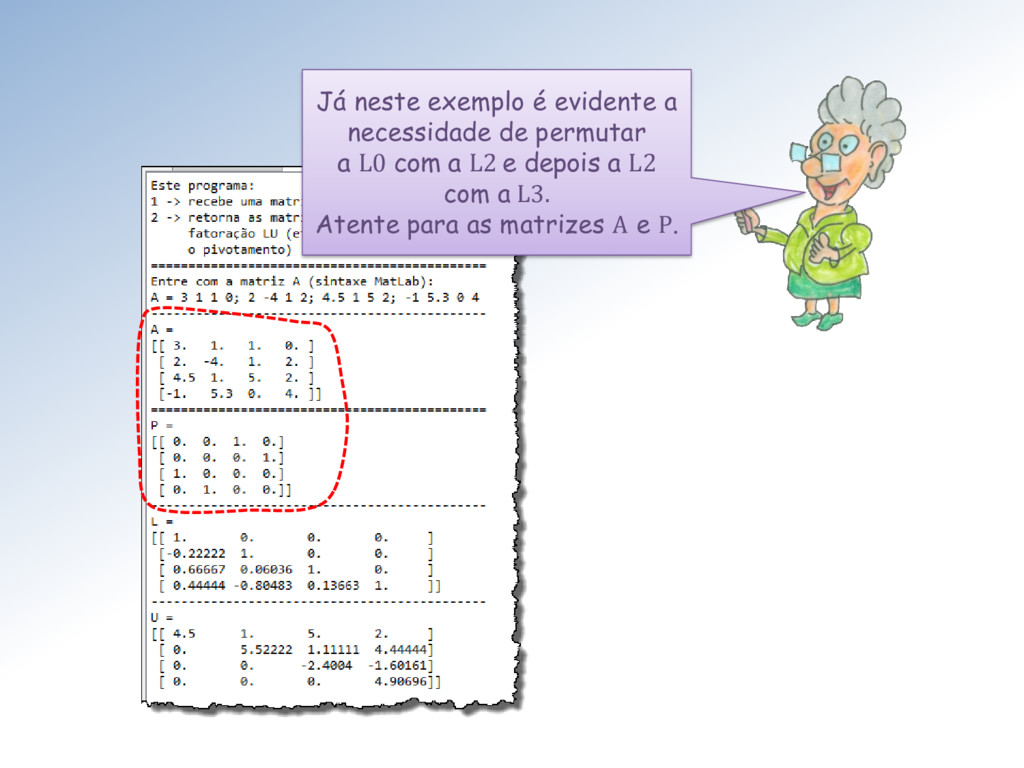
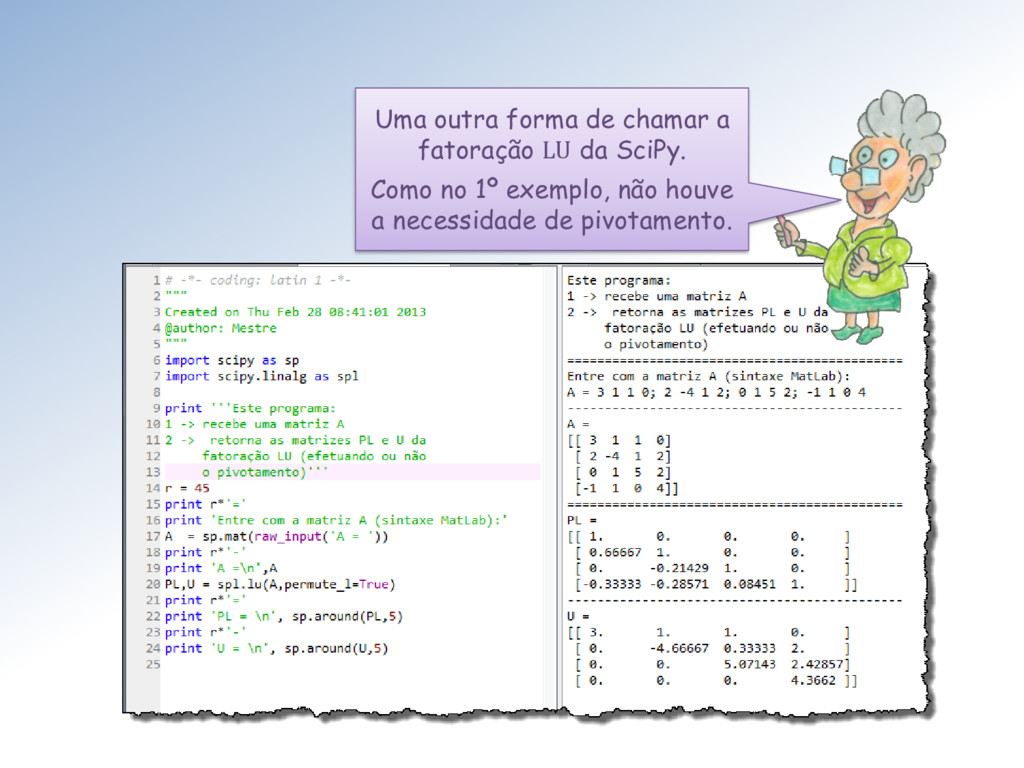
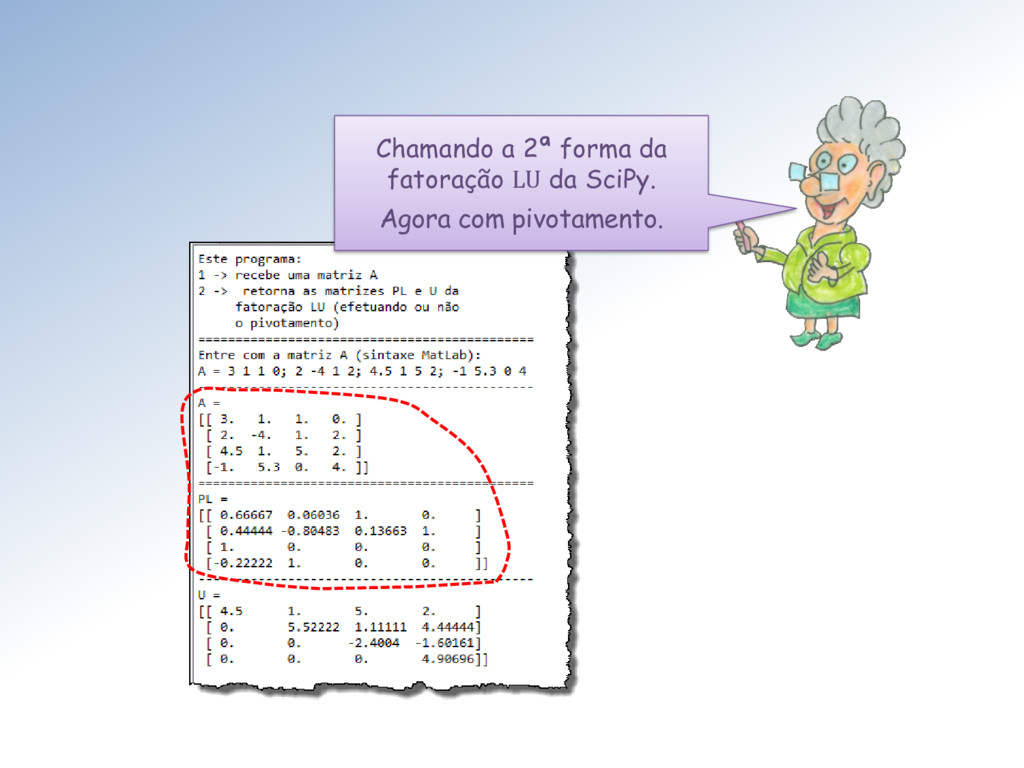
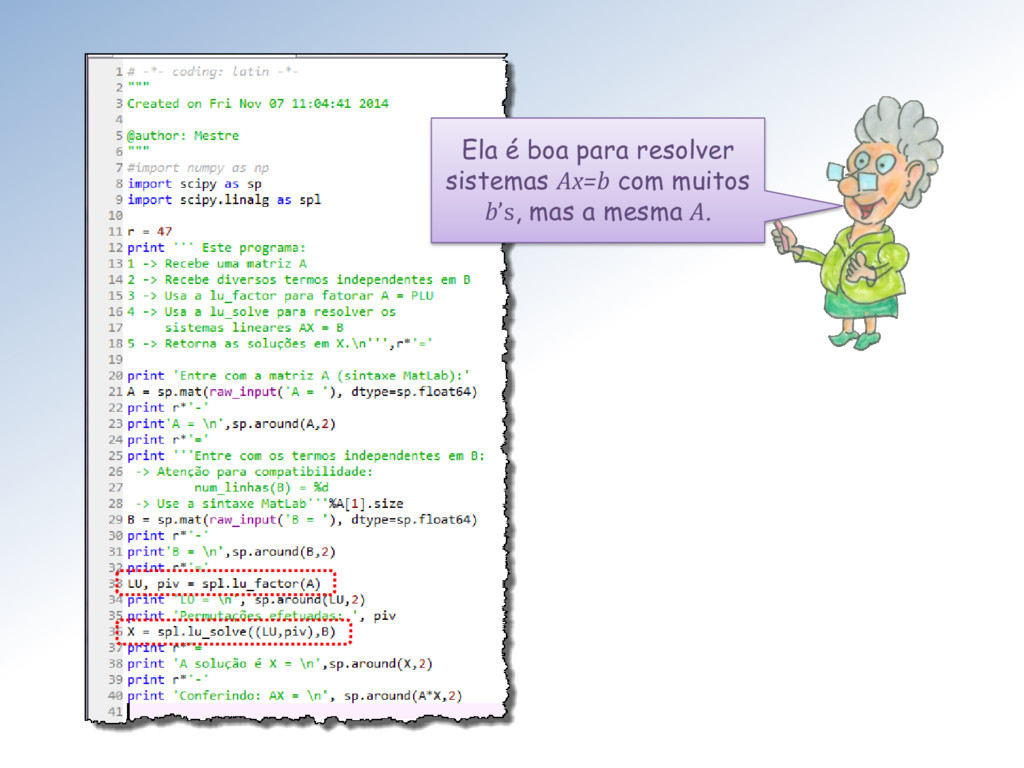
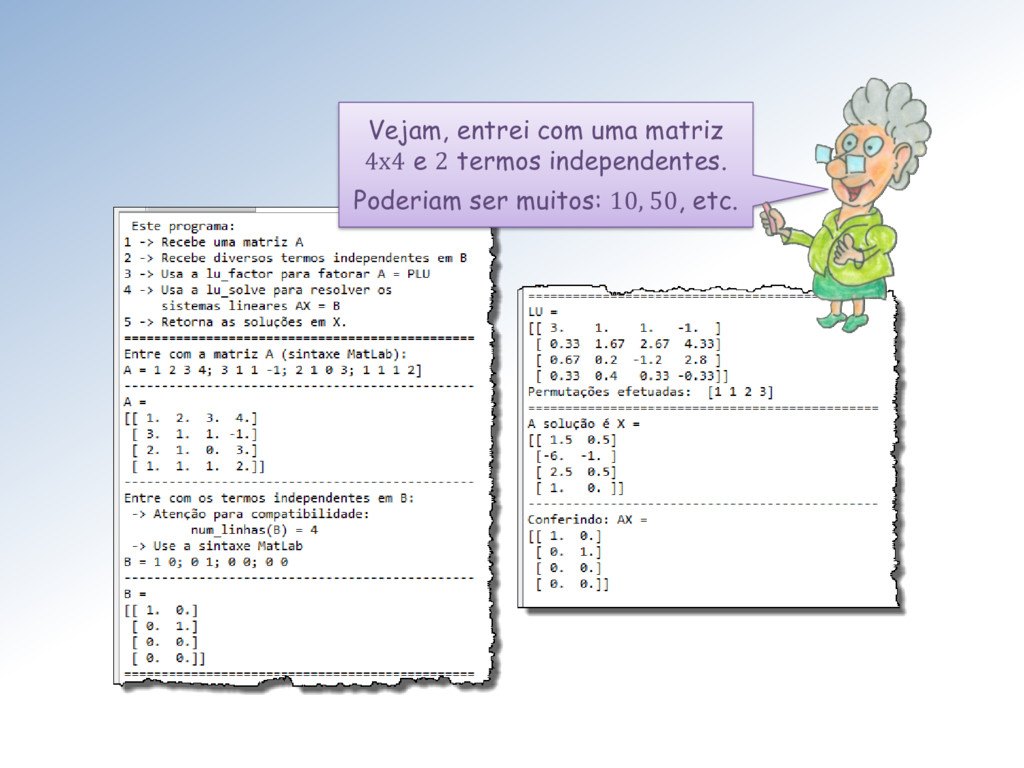
o sistema linear = é equivalente a resolver = . Então resolvemos primeiro o sistema = e depois o = . Note que esses dois são sistemas triangulares, facílimos de resolver! Conforme já vimos, o maior trabalho reside em fatorar (i.é, efetuar o processo de eliminação).
veja na próxima transparência! Confirmando, se A é simétrica e positiva definida está garantida a existência de uma matriz triangular superior tal que = . É como se U fosse a raiz quadrada de A, Mestre, pois = .
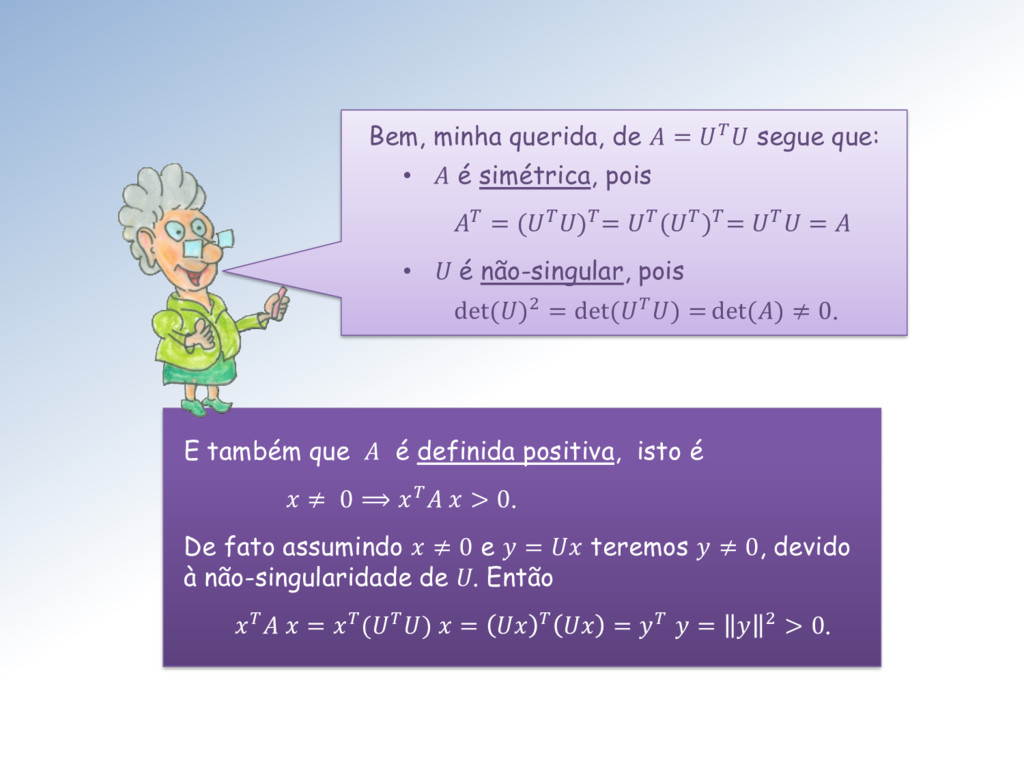
0 ⟹ > 0. De fato assumindo ≠ 0 e = teremos ≠ 0, devido à não-singularidade de U. Então = () = = = 2 > 0. Bem, minha querida, de = segue que: • A é simétrica, pois = ()= ()= = • U é não-singular, pois det()2 = det() = det() ≠ 0.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}