本資料はSatAI.challengeのサーベイメンバーと共に作成したものです。
SatAI.challengeは、リモートセンシング技術にAIを適用した論文の調査や、
より俯瞰した技術トレンドの調査や国際学会のメタサーベイを行う研究グループです。
speakerdeckではSatAI.challenge内での勉強会で使用した資料をWeb上で共有しています。
https://x.com/sataichallenge
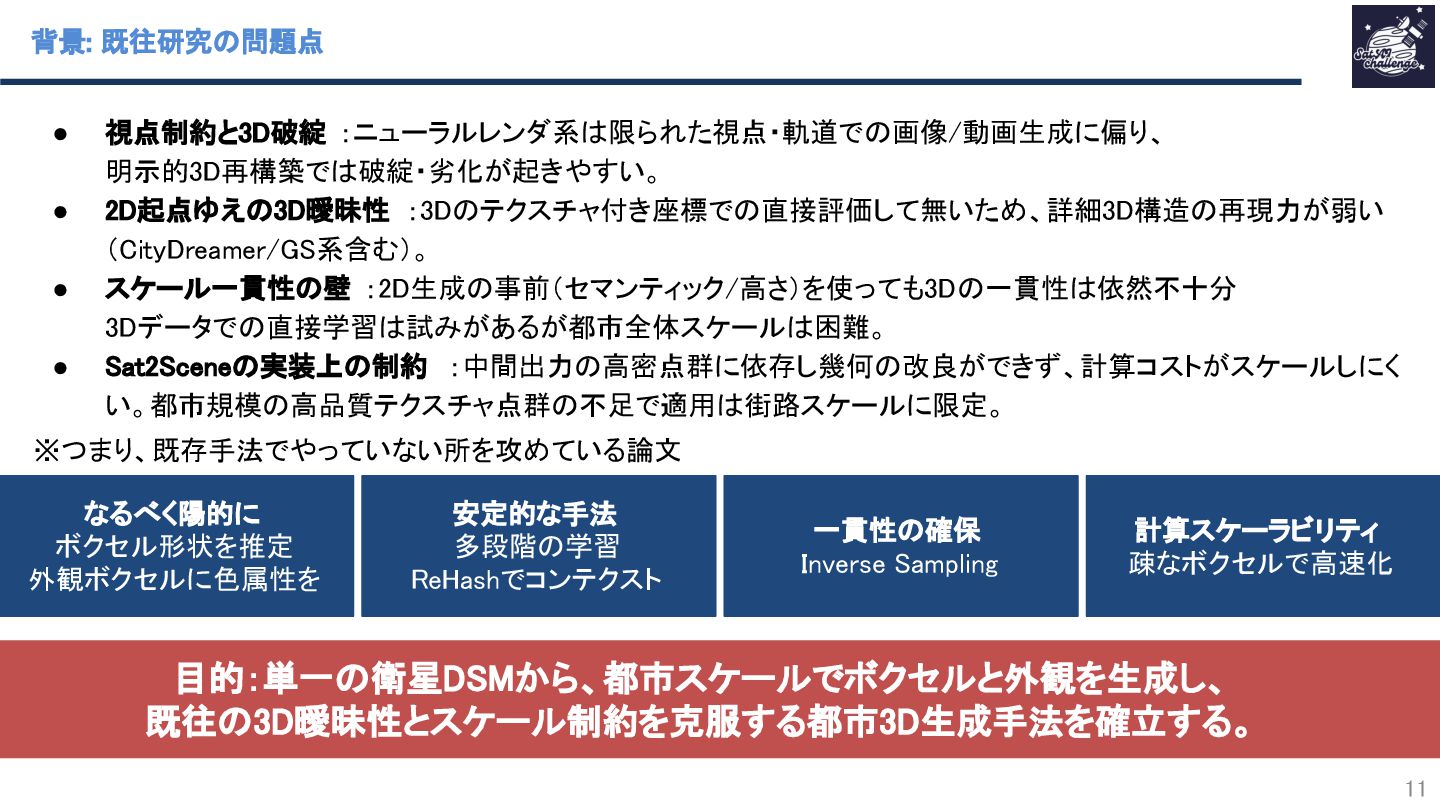
紹介する論文は、「Sat2City:3D City Generation from A Single Satellite Image with Cascaded Latent Diffusion」です。
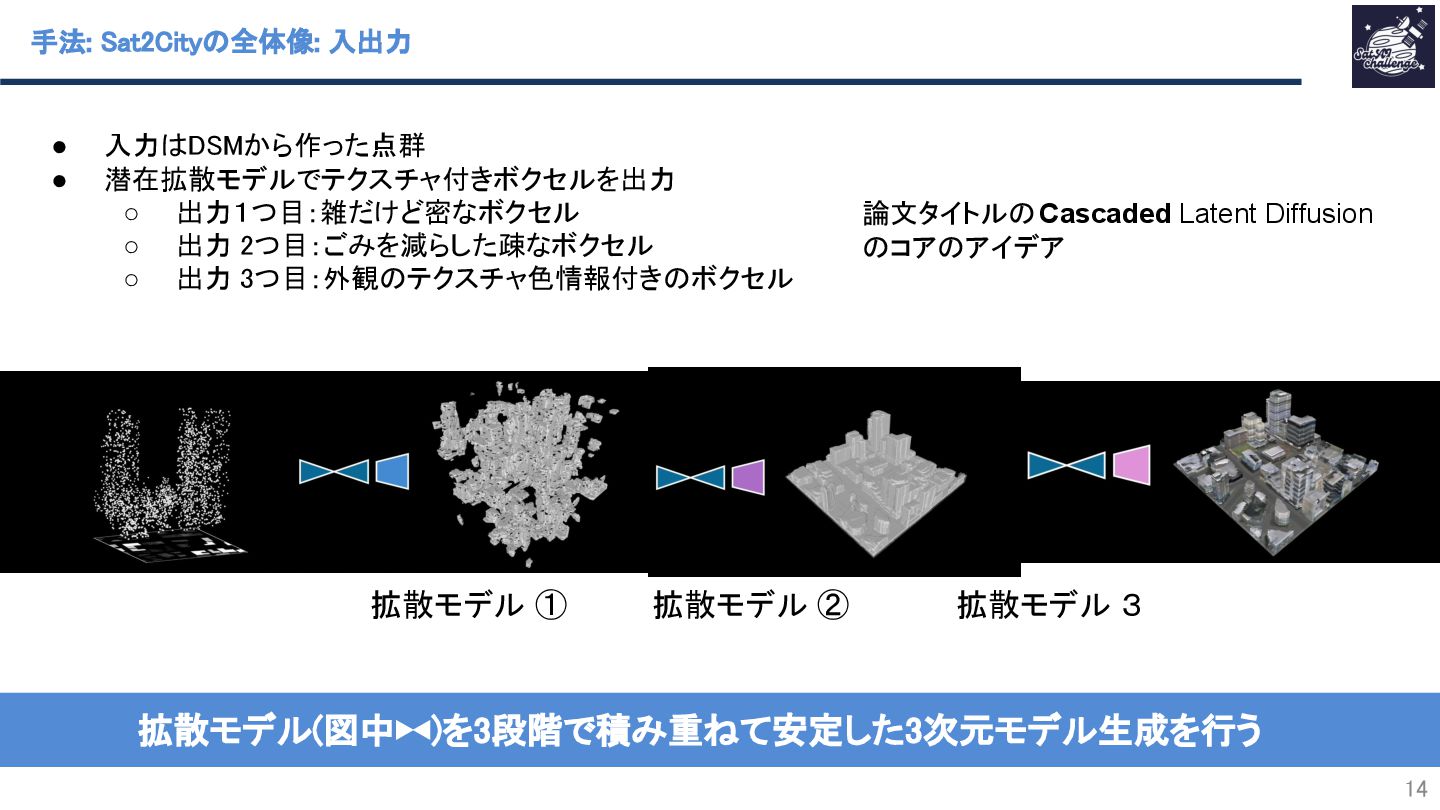
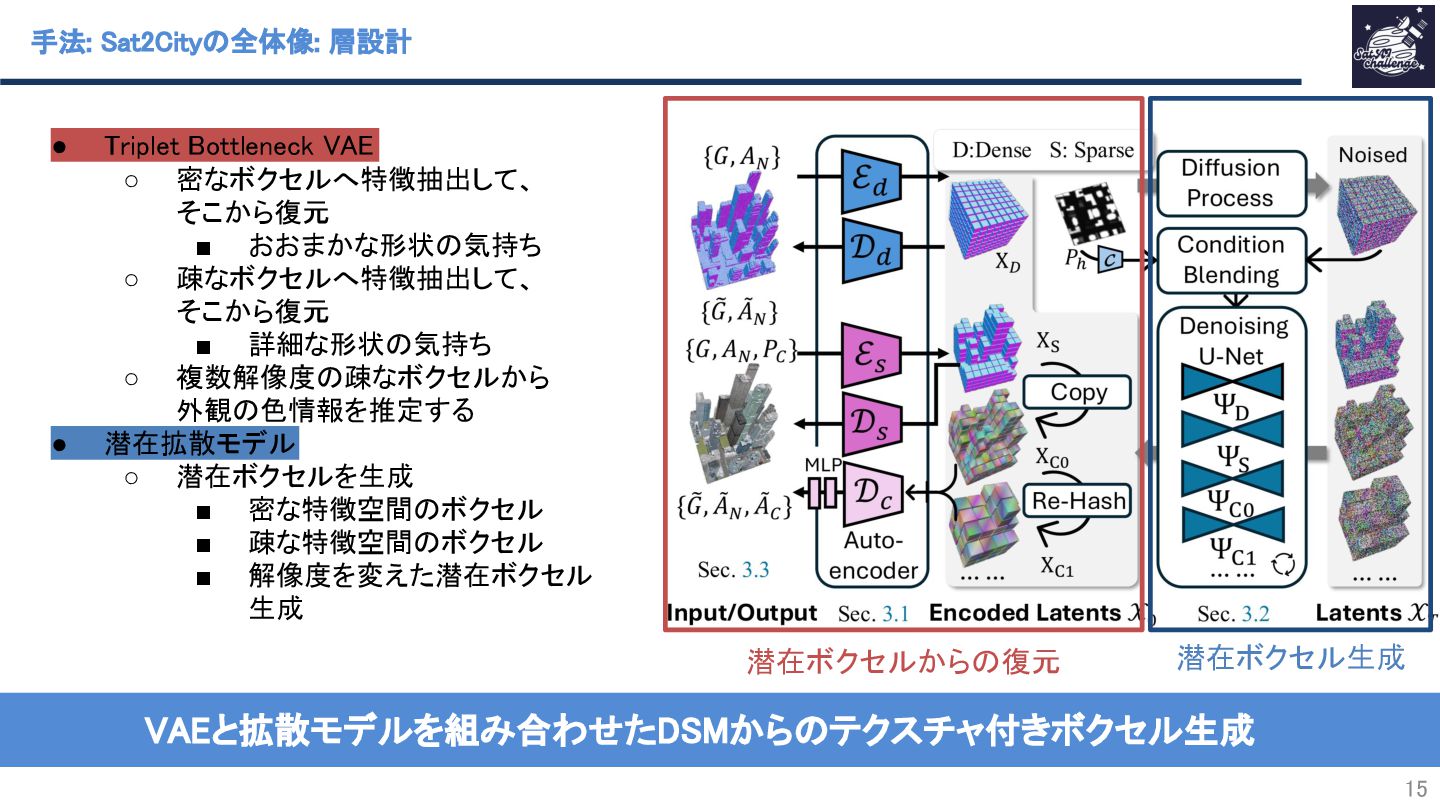
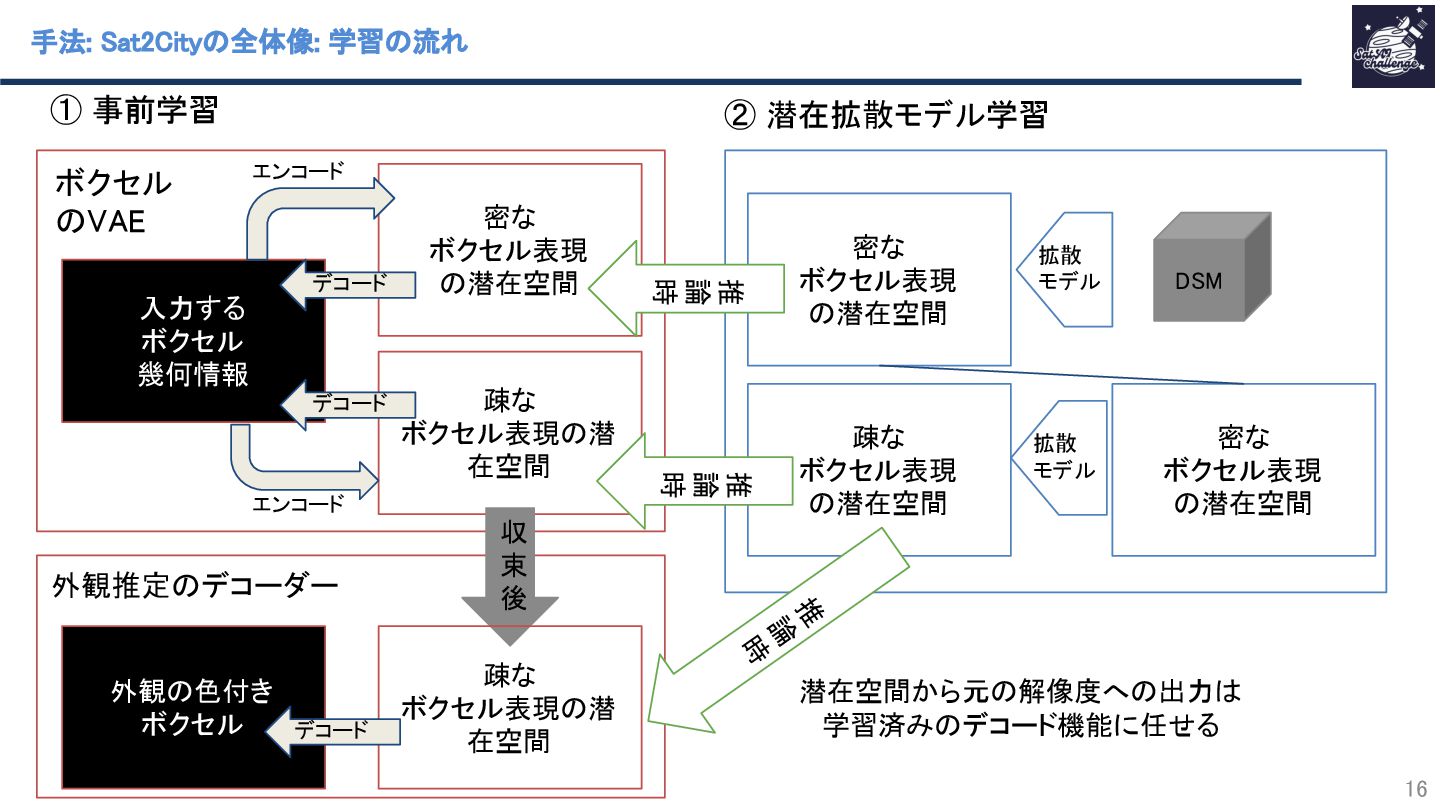
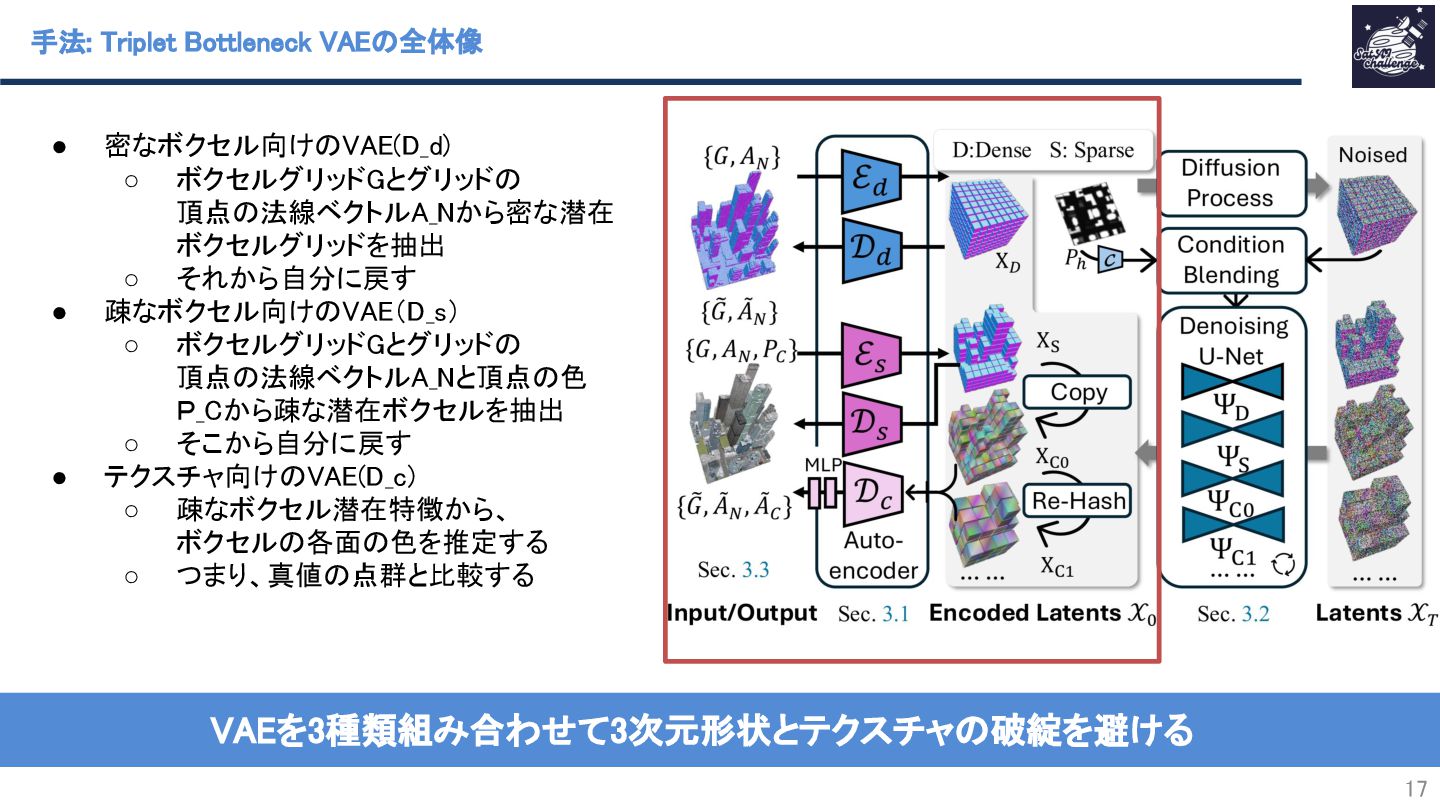
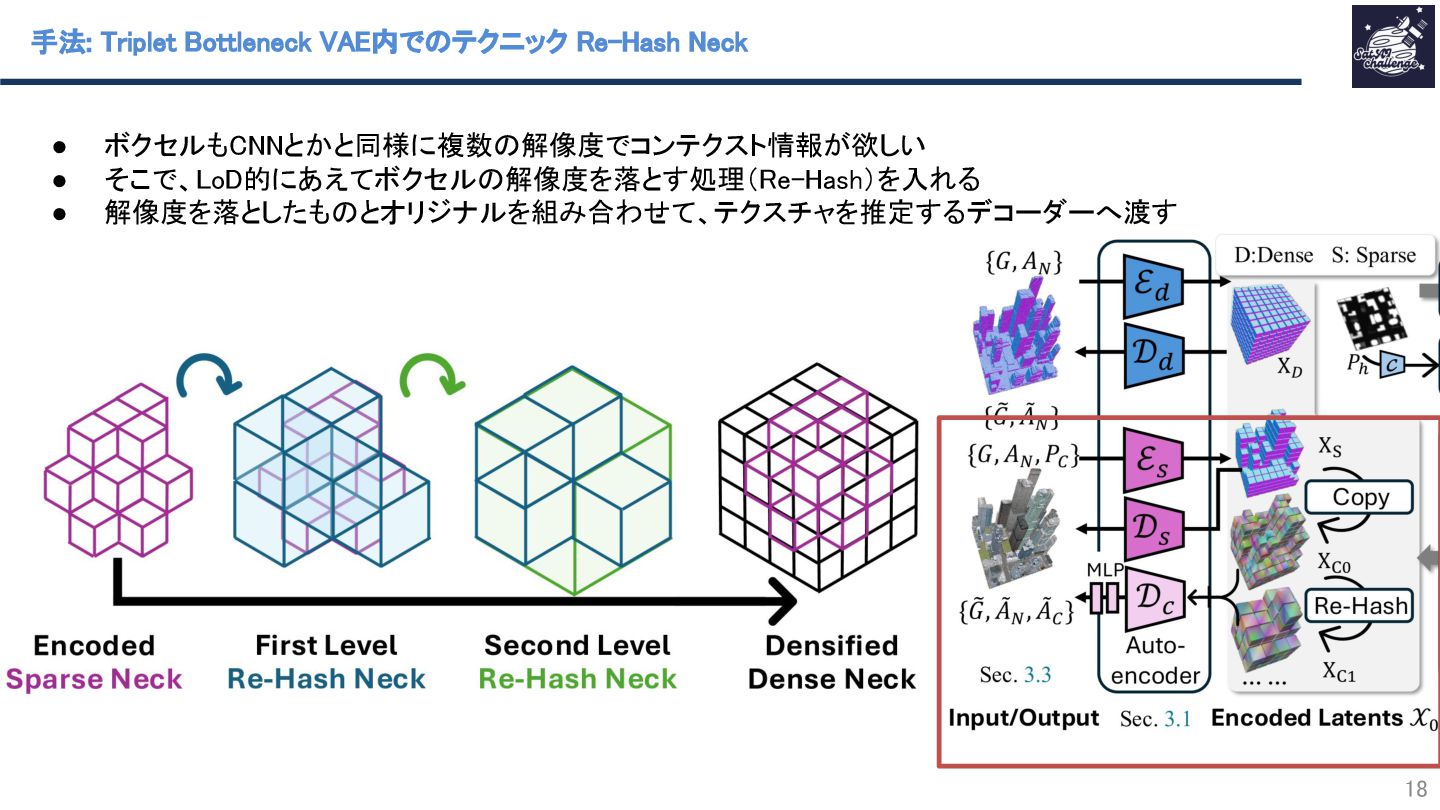
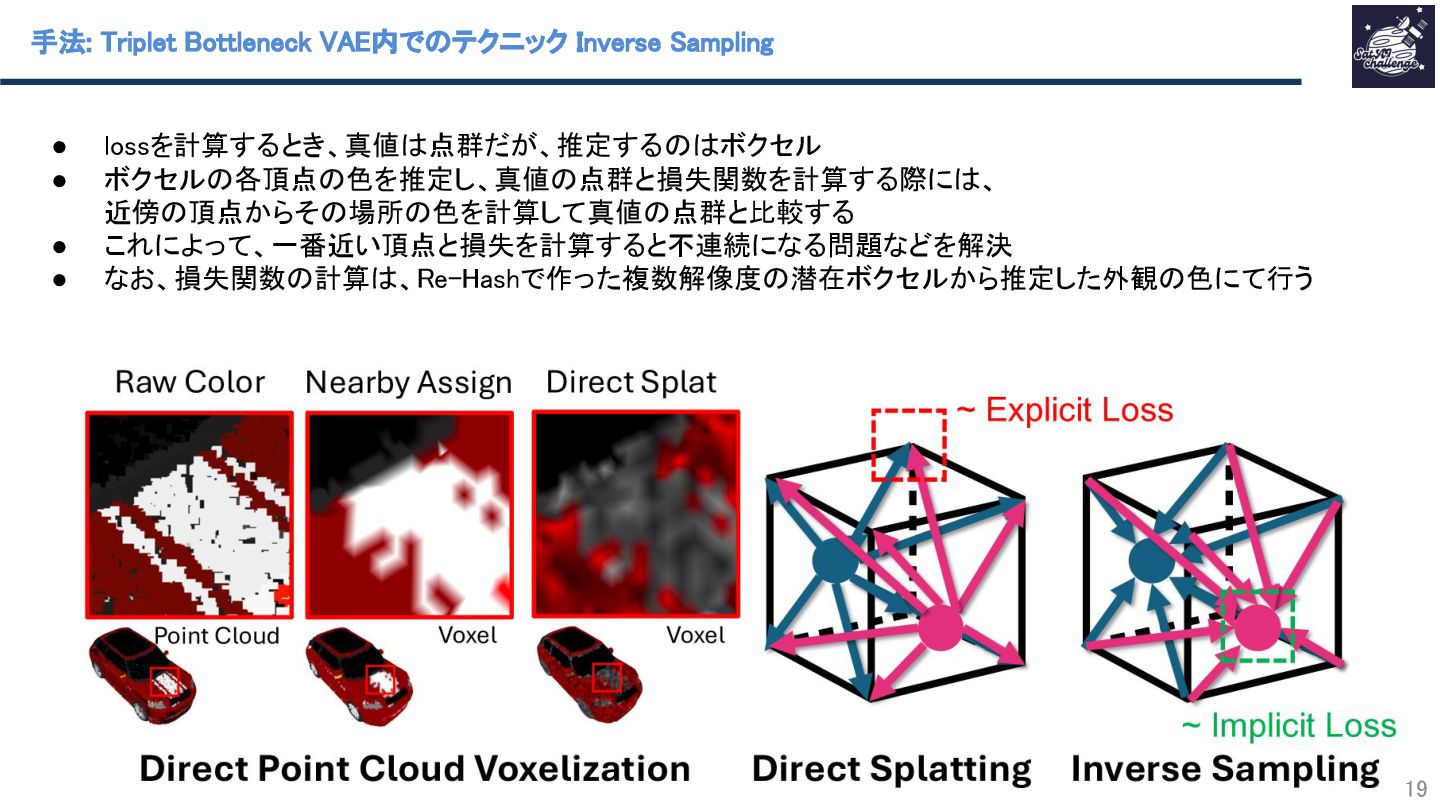
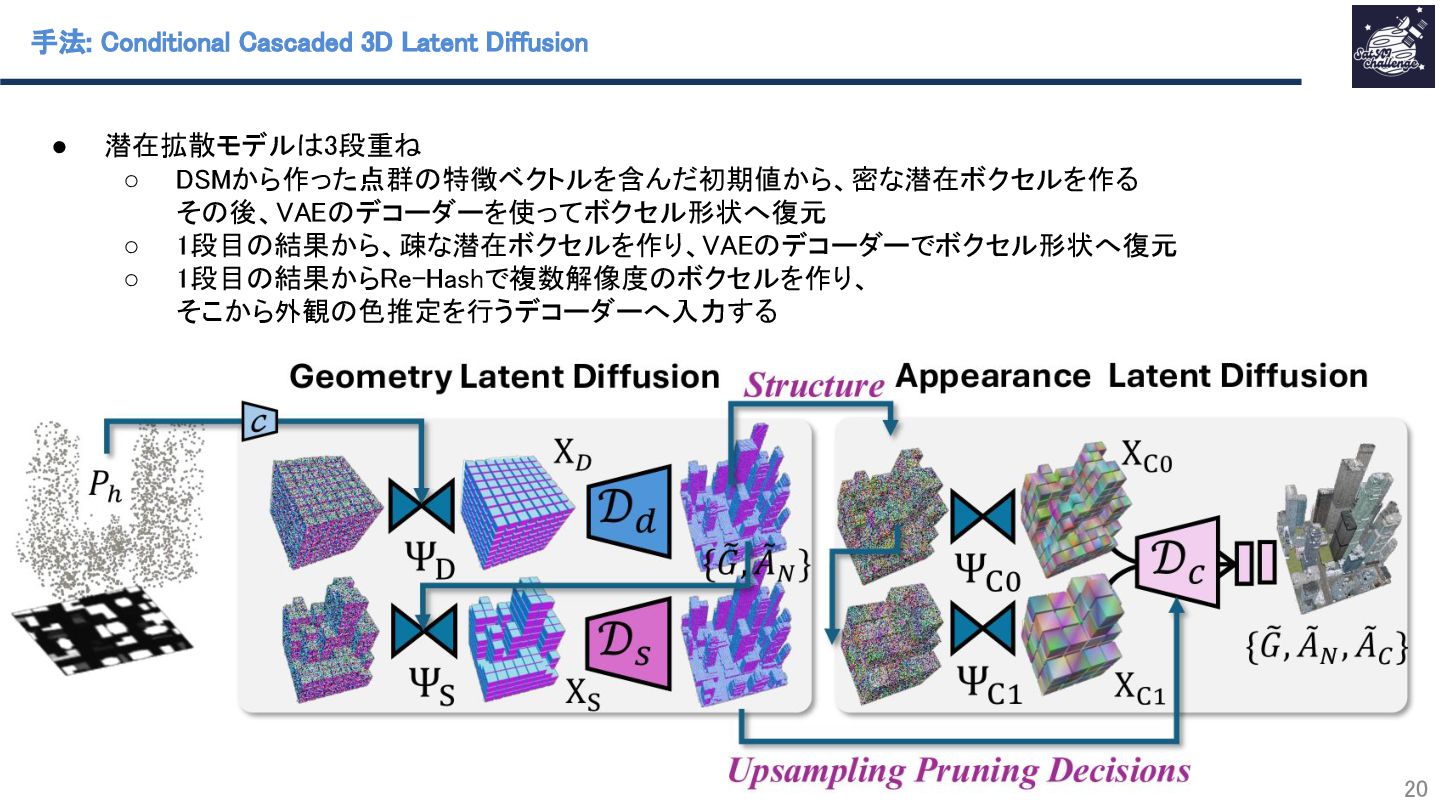
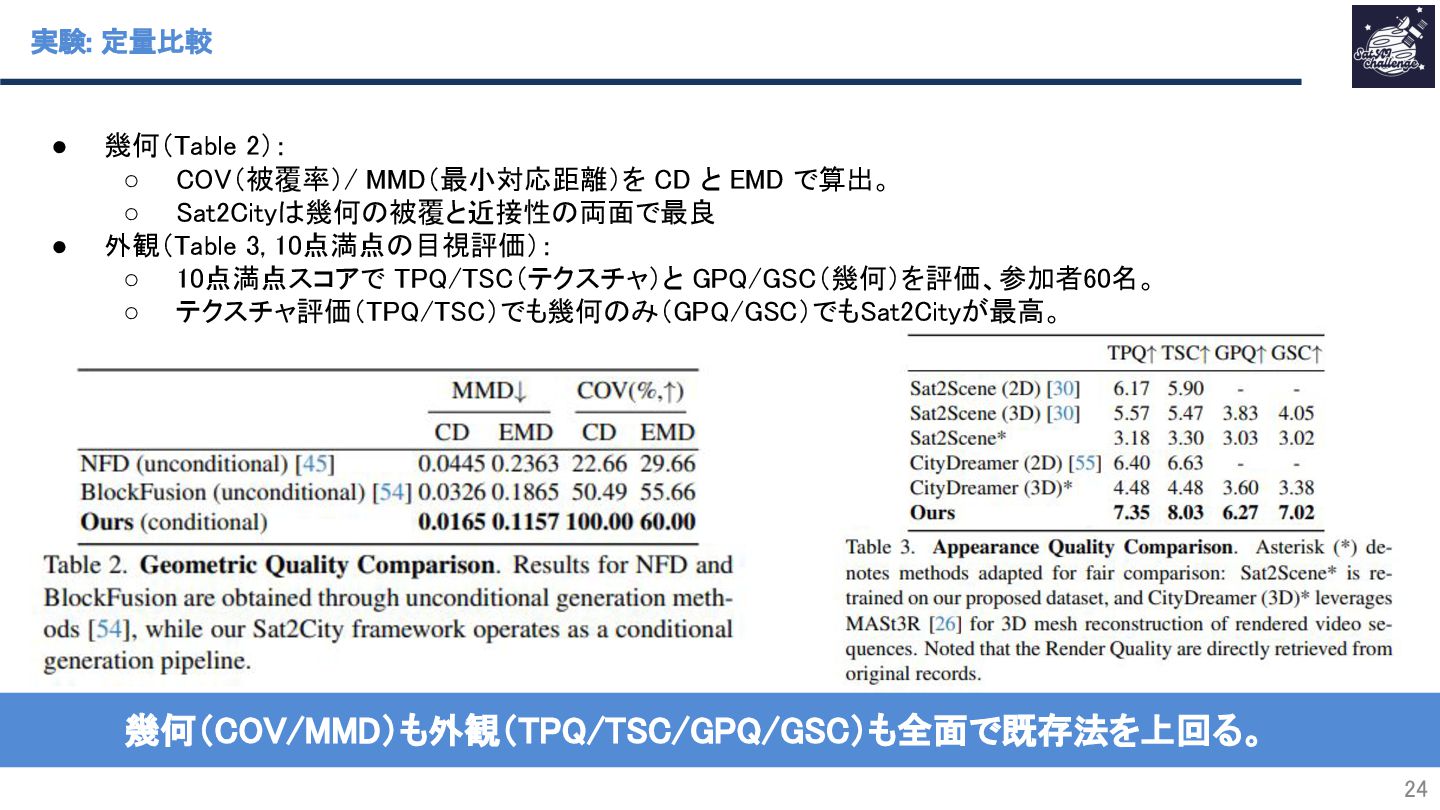
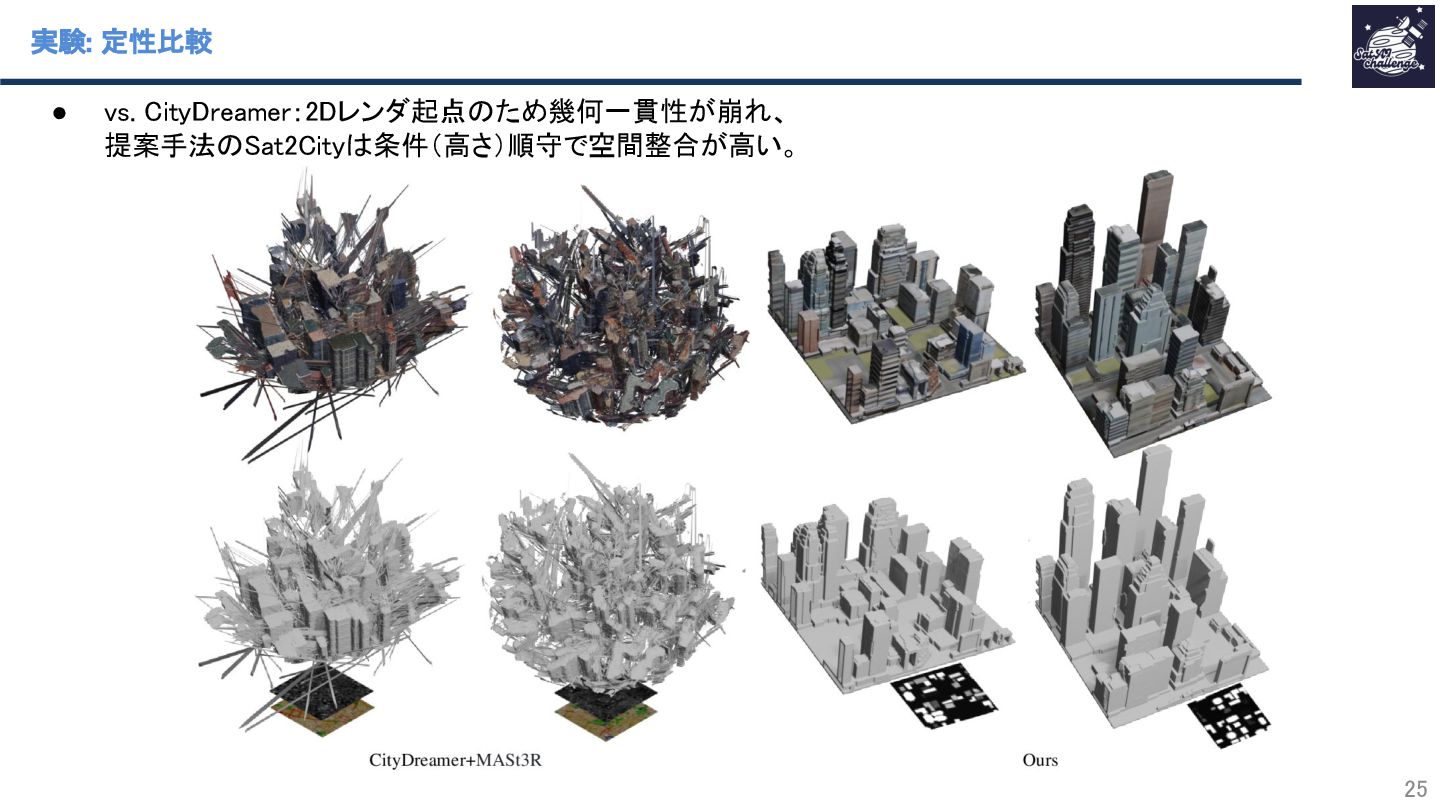
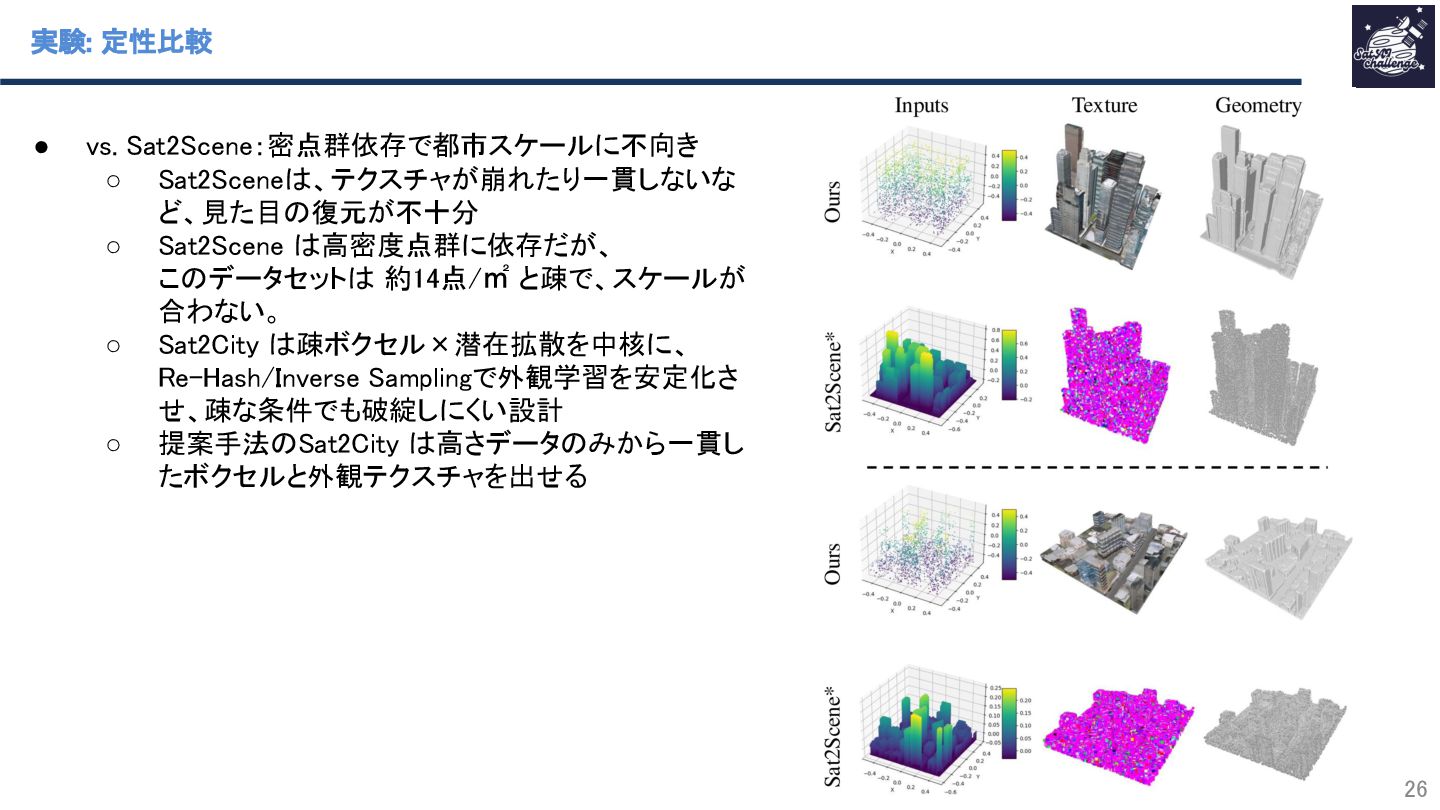
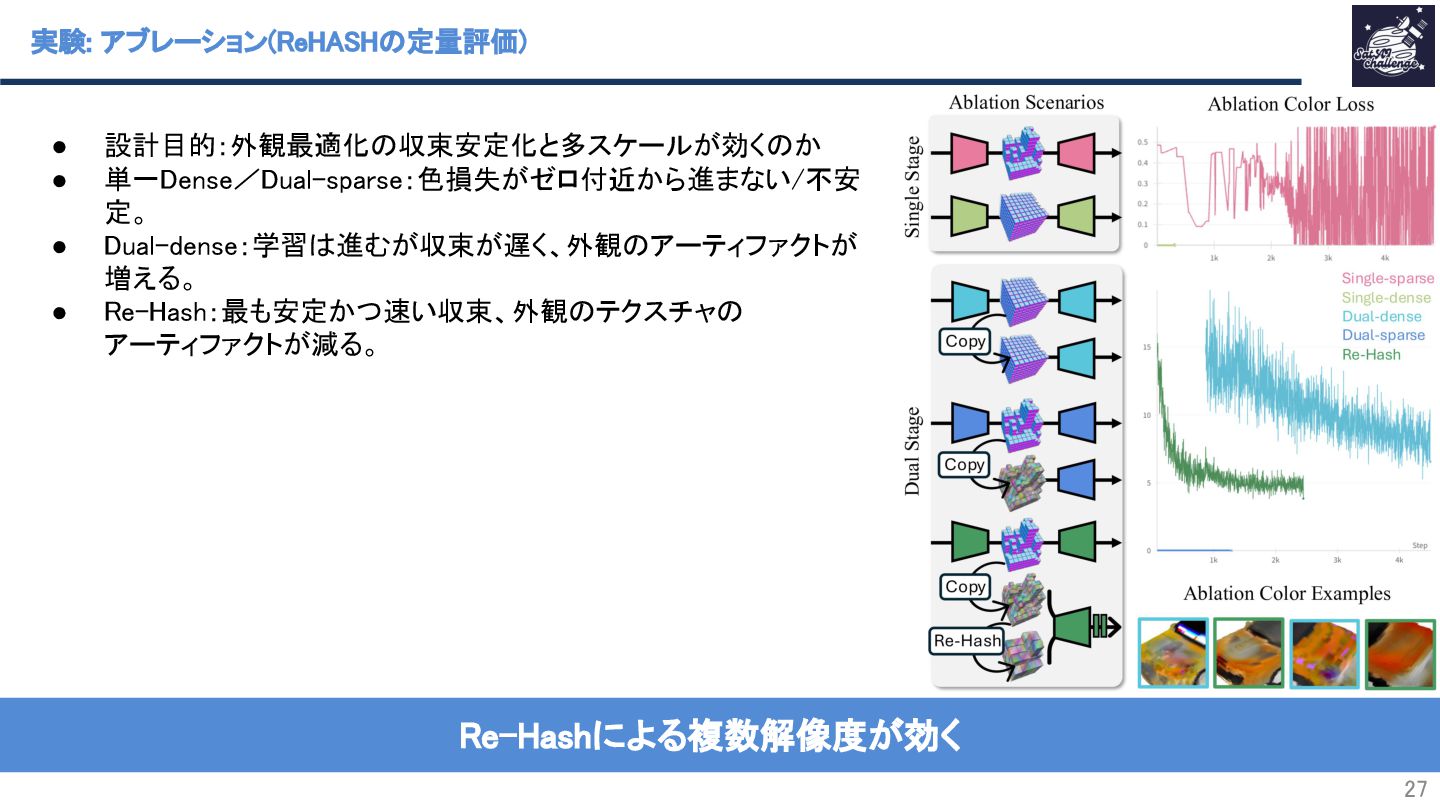
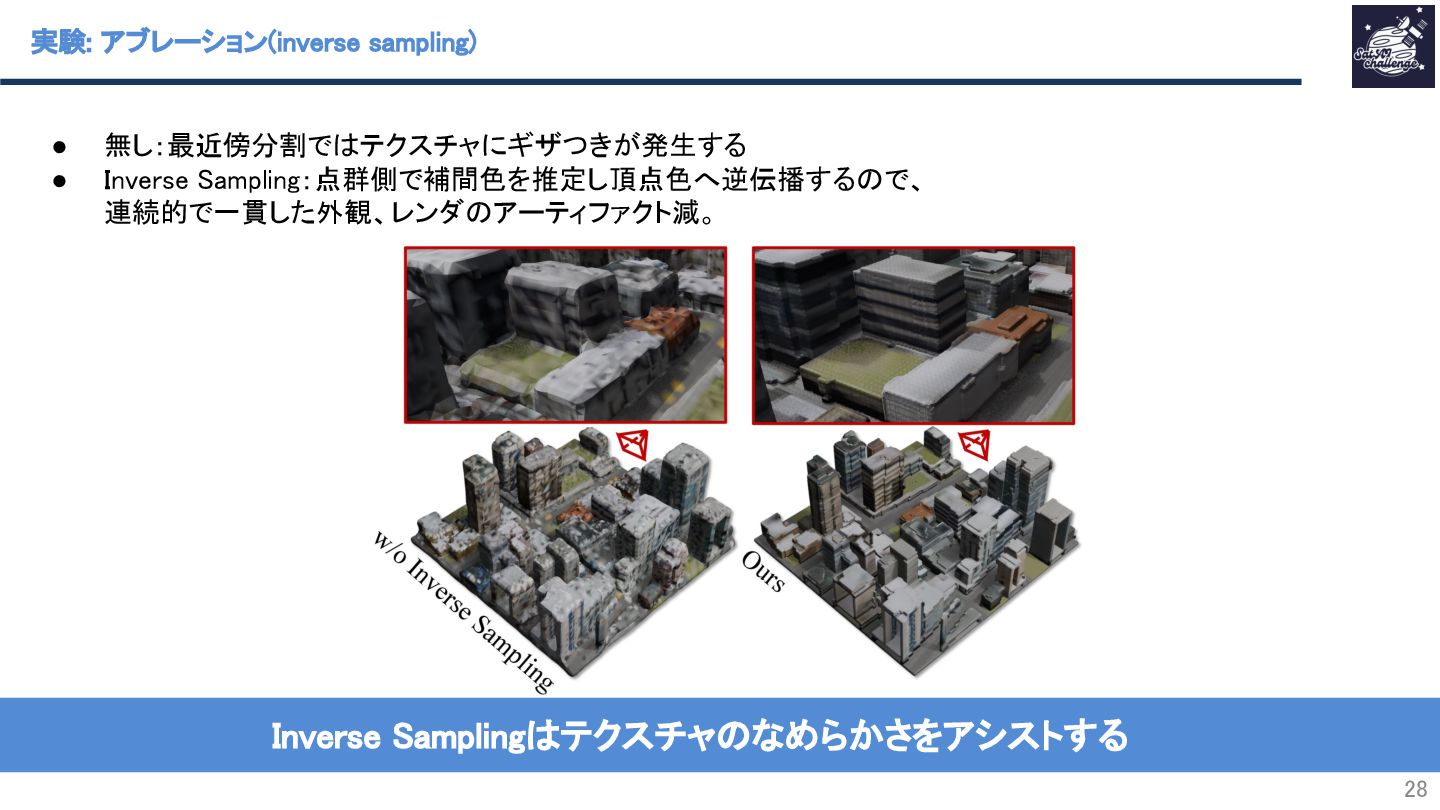
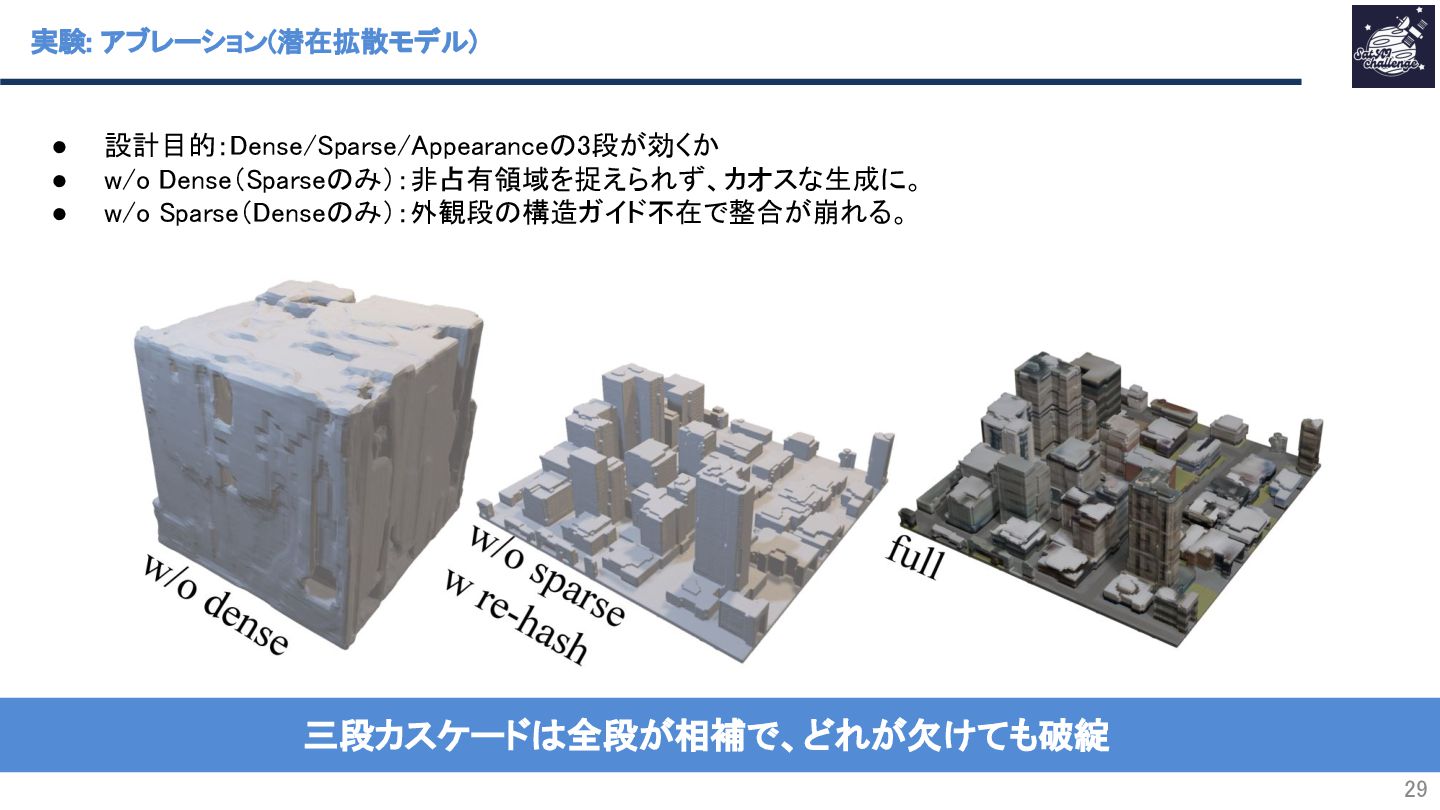
本研究は、単一のDSM画像から潜在拡散モデルを使ってテクスチャ付きの3次元モデルを生成する手法です。具体的にはVAEによる密・疎なボクセルに対する潜在空間の学習と、3段階の拡散モデルによる潜在空間の生成を行います。なお、テクスチャを生成する際にはRehashによる複数解像度のボクセルの表現から行い、さらにインバースレンダリングによる損失関数の計算を行い空間的な整合性を高める工夫を行っております。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}