Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Horizon-GS: Unified 3D Gaussian Splatting for L...
Search
Spatial AI Network
May 15, 2025
Technology
660
0
Share
Horizon-GS: Unified 3D Gaussian Splatting for Large-Scale Aerial-to-Ground Scenes
Scaffold-GS, Octree-GSをベースに、地上と空からの2種類の撮影画像から復元するための工夫たち。 CVPR2025。
Spatial AI Network
May 15, 2025
More Decks by Spatial AI Network
See All by Spatial AI Network
FastGS: Training 3D Gaussian Splatting in 100 Seconds (CVPR2026 Highlight)
spatial_ai_network
0
71
Uncalibrated Structure from Motion on a Sphere (ICCV 2025)
spatial_ai_network
0
190
Understanding multi-view transformers (and VGGT)
spatial_ai_network
2
540
Preconditioned Single-step Transforms for Non-rigid ICP (Eurographics 2025)
spatial_ai_network
0
150
Human Mesh Modeling for Anny Body + α
spatial_ai_network
0
160
ChatGPTで論⽂は読めるのか
spatial_ai_network
12
33k
Exploring ways to enhance robustnessof 3D reconstruction using COLMAP
spatial_ai_network
1
200
CL-Splats: Continual Learning of Gaussian Splatting with Local Optimization
spatial_ai_network
0
130
3D Prior is All You Need: Cross-Task Few-shot 2D Gaze Estimation
spatial_ai_network
0
98
Other Decks in Technology
See All in Technology
マーケットプレイス版Oracle WebCenter Content For OCI
oracle4engineer
PRO
5
1.7k
Amazon Bedrock 経由の Claude Cowork を試してみよう・MCP にも繋いでみよう
sugimomoto
0
270
AIが変えた"品質の守り方"
kkakizaki
13
5.4k
イベントストーミングとKiroの仕様駆動開発で実現する要件の認識合わせプロセス
syobochim
7
970
Claude Codeですべての日常業務を爆速化しよう!
minorun365
PRO
16
16k
Agentic AI時代における メルカリのAIガバナンスとガードレール実装
naoichihara
16
17k
Generative UI × A2UI で AI エージェントを作った話 AI-DLC も使ってみた!
kmiya84377
1
290
GitHub Copilot CLIでWebアクセシビリティを改善した話
tomokusaba
0
140
「使われるデータ基盤」を目指してデータアナリストとワークショップをやった話
jackojacko_
2
940
コードレビューを制するチームがソフトウェアデリバリーのフローを制す / Beyond Code Review: Distributing Its Responsibilities Across the SDLC
mtx2s
3
480
AI時代から振り返るTerraform drift運用の歴史 / AI Age Reflections on the History of Terraform Drift Operations
aeonpeople
0
600
Unlocking the Apps
pimterry
0
120
Featured
See All Featured
Getting science done with accelerated Python computing platforms
jacobtomlinson
2
210
4 Signs Your Business is Dying
shpigford
187
22k
The innovator’s Mindset - Leading Through an Era of Exponential Change - McGill University 2025
jdejongh
PRO
1
180
DevOps and Value Stream Thinking: Enabling flow, efficiency and business value
helenjbeal
1
210
Code Review Best Practice
trishagee
74
20k
KATA
mclloyd
PRO
35
15k
Building an army of robots
kneath
306
46k
We Analyzed 250 Million AI Search Results: Here's What I Found
joshbly
1
1.3k
Dominate Local Search Results - an insider guide to GBP, reviews, and Local SEO
greggifford
PRO
0
180
Context Engineering - Making Every Token Count
addyosmani
9
920
Leadership Guide Workshop - DevTernity 2021
reverentgeek
1
290
Why Our Code Smells
bkeepers
PRO
340
58k
Transcript
2025/04/08 Spatial AI 勉強会 読み手: 菊池悠太 (Preferred Networks, inc.) to
appear at CVPR2025 図表などは特に断り無ければ論文やproj. pageより (関連論文)とあるページの図表などはその関連論文より
https://city-super.github.io/horizon-gs/ の動画
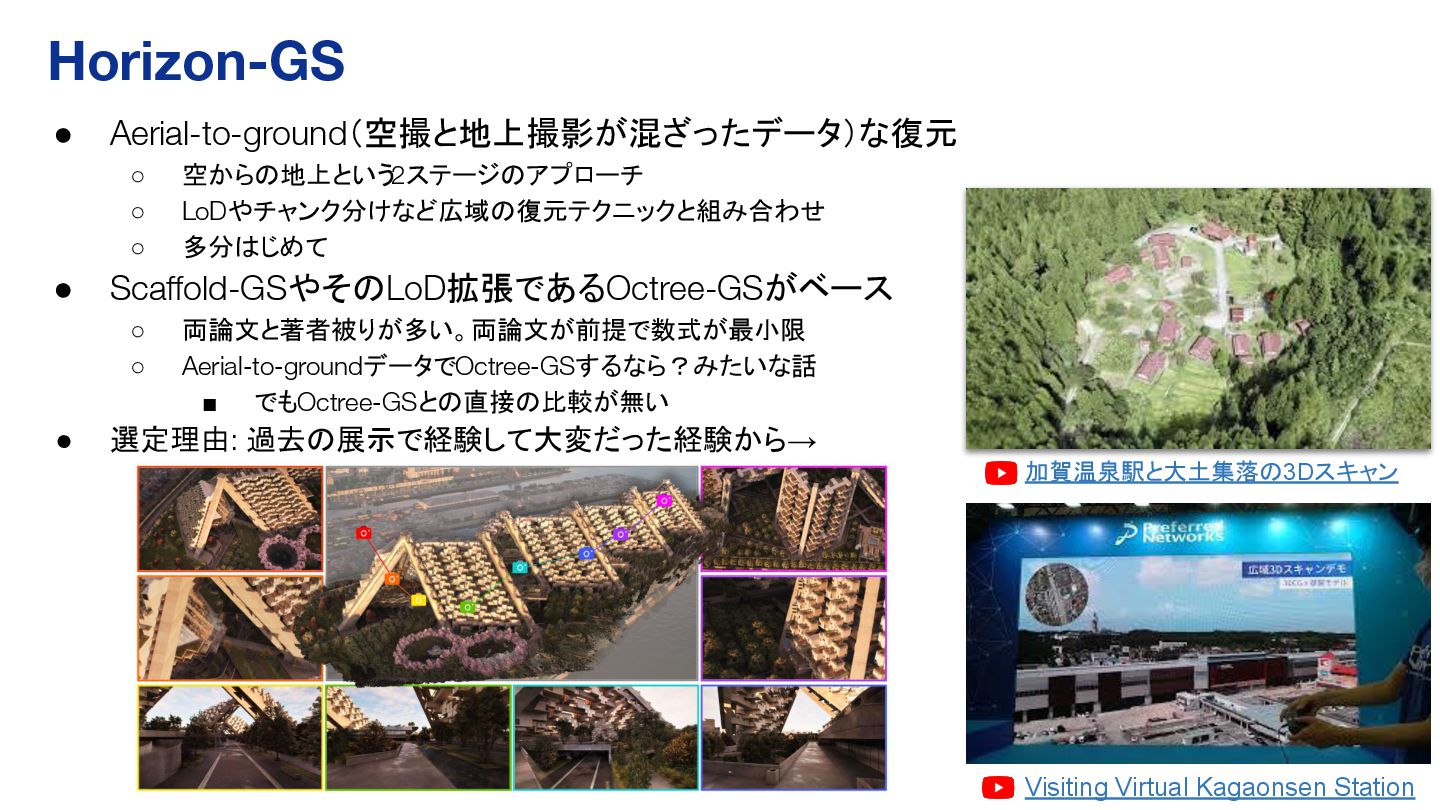
3 • Aerial-to-ground(空撮と地上撮影が混ざったデータ)な復元 ◦ 空からの地上という2ステージのアプローチ ◦ LoDやチャンク分けなど広域の復元テクニックと組み合わせ ◦ 多分はじめて •
Scaffold-GSやそのLoD拡張であるOctree-GSがベース ◦ 両論文と著者被りが多い。両論文が前提で数式が最小限 ◦ Aerial-to-groundデータでOctree-GSするなら?みたいな話 ▪ でもOctree-GSとの直接の比較が無い • 選定理由: 過去の展示で経験して大変だった経験から→ Horizon-GS 加賀温泉駅と大土集落の3Dスキャン Visiting Virtual Kagaonsen Station
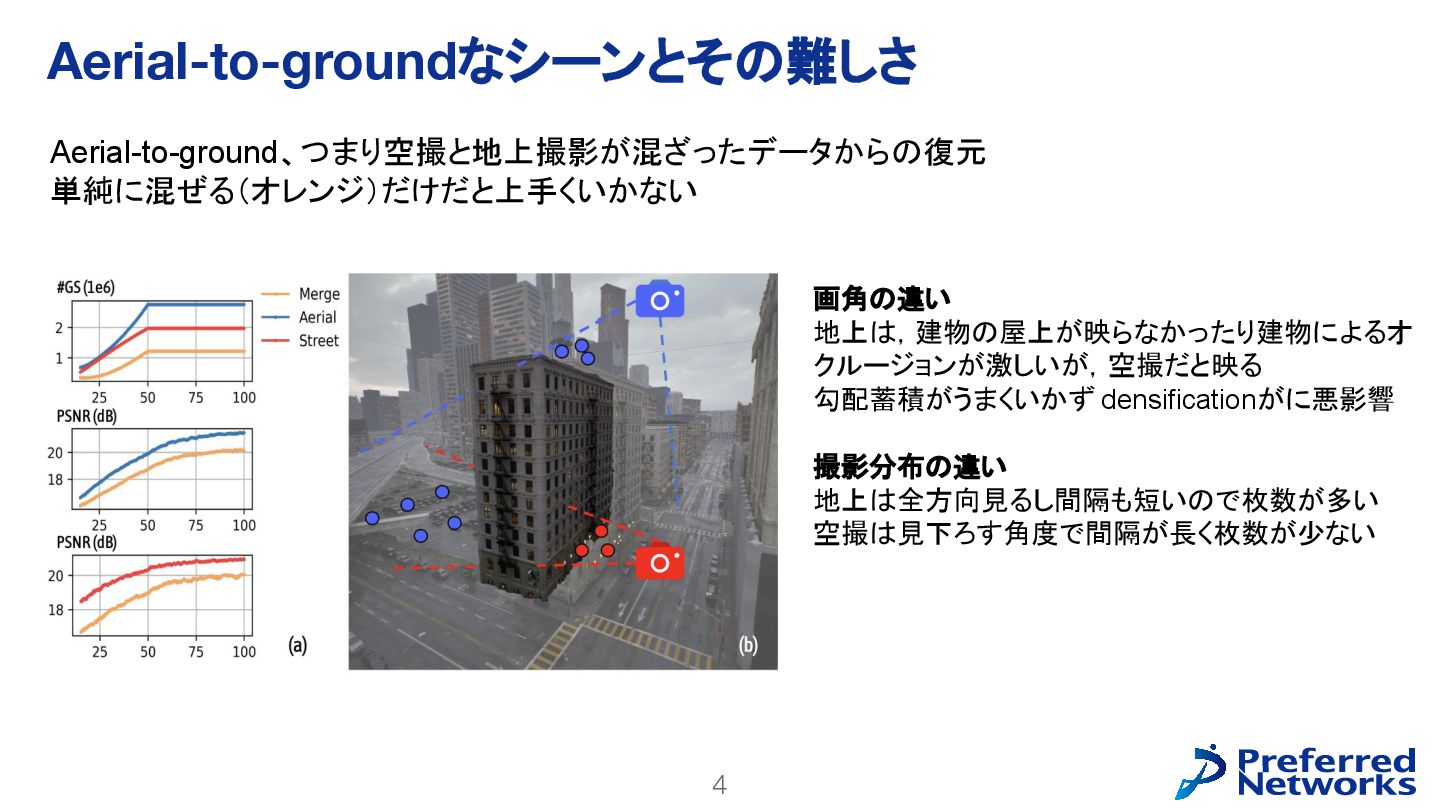
4 Aerial-to-groundなシーンとその難しさ Aerial-to-ground、つまり空撮と地上撮影が混ざったデータからの復元 単純に混ぜる(オレンジ)だけだと上手くいかない 画角の違い 地上は,建物の屋上が映らなかったり建物によるオ クルージョンが激しいが,空撮だと映る 勾配蓄積がうまくいかず densificationがに悪影響 撮影分布の違い
地上は全方向見るし間隔も短いので枚数が多い 空撮は見下ろす角度で間隔が長く枚数が少ない
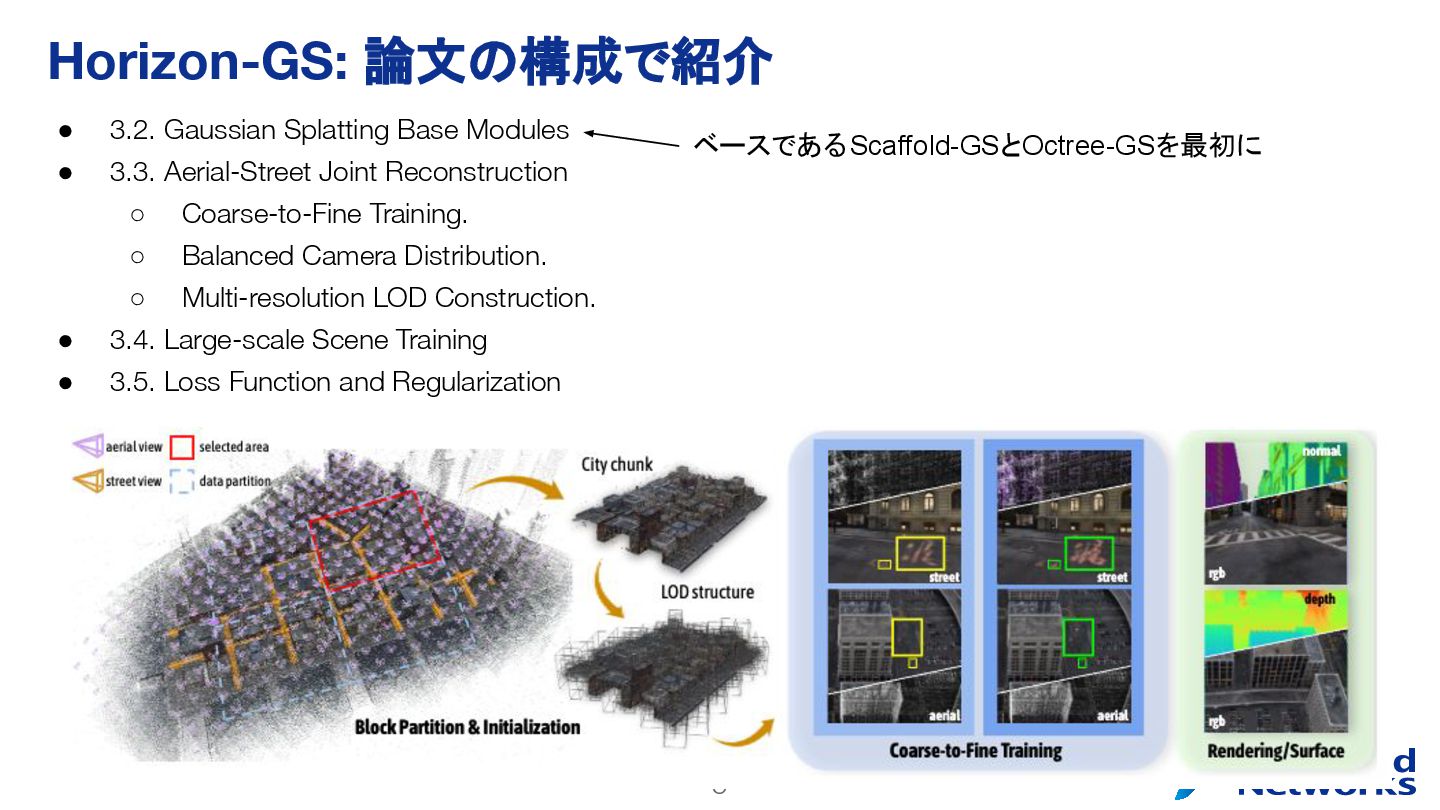
5 • 3.2. Gaussian Splatting Base Modules • 3.3. Aerial-Street
Joint Reconstruction ◦ Coarse-to-Fine Training. ◦ Balanced Camera Distribution. ◦ Multi-resolution LOD Construction. • 3.4. Large-scale Scene Training • 3.5. Loss Function and Regularization Horizon-GS: 論文の構成で紹介 ベースであるScaffold-GSとOctree-GSを最初に
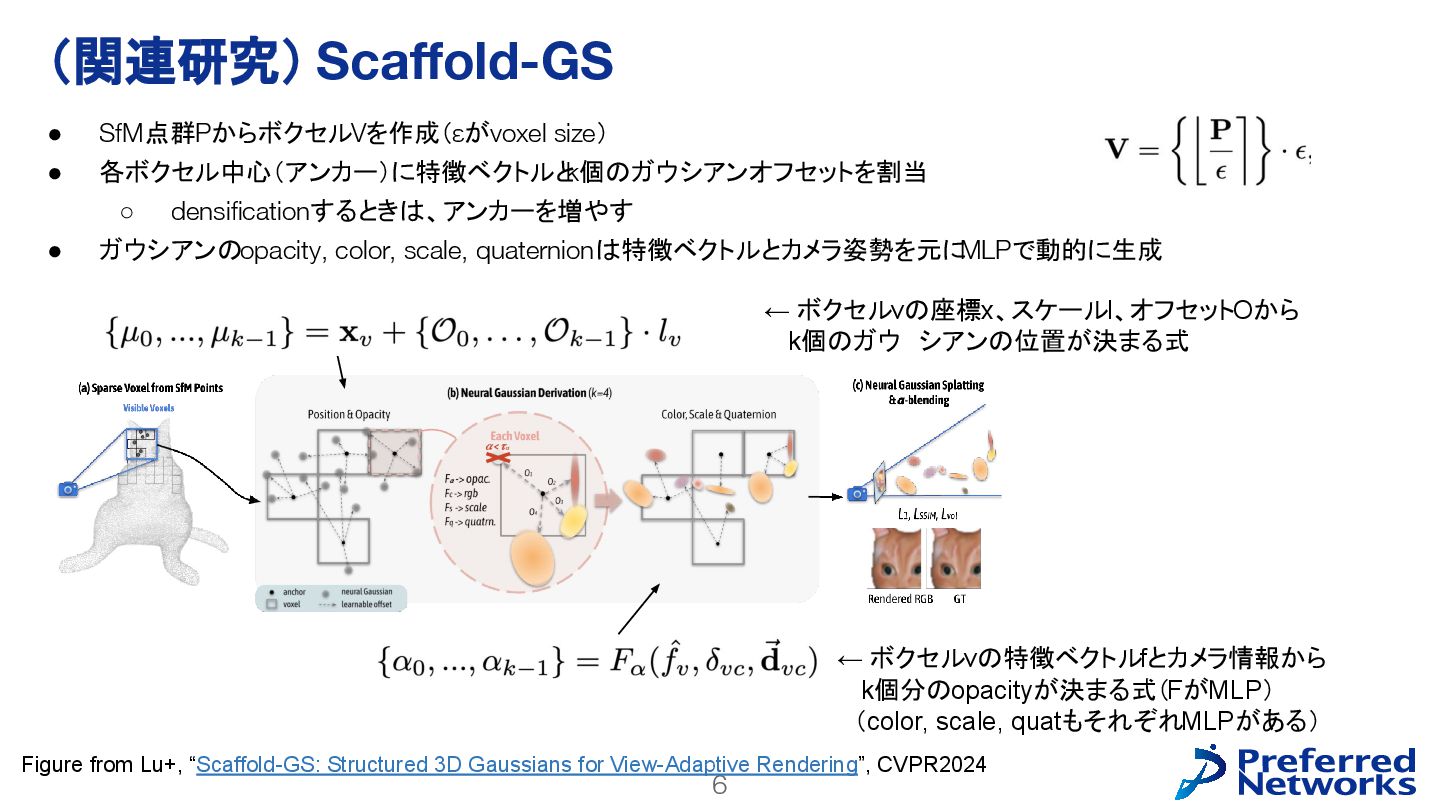
6 (関連研究) Scaffold-GS • SfM点群PからボクセルVを作成(εがvoxel size) • 各ボクセル中心(アンカー)に特徴ベクトルと k個のガウシアンオフセットを割当 ◦
densificationするときは、アンカーを増やす • ガウシアンのopacity, color, scale, quaternionは特徴ベクトルとカメラ姿勢を元に MLPで動的に生成 Figure from Lu+, “Scaffold-GS: Structured 3D Gaussians for View-Adaptive Rendering”, CVPR2024 ← ボクセルvの座標x、スケールl、オフセットOから k個のガウ シアンの位置が決まる式 ← ボクセルvの特徴ベクトルfとカメラ情報から k個分のopacityが決まる式(FがMLP) (color, scale, quatもそれぞれMLPがある)
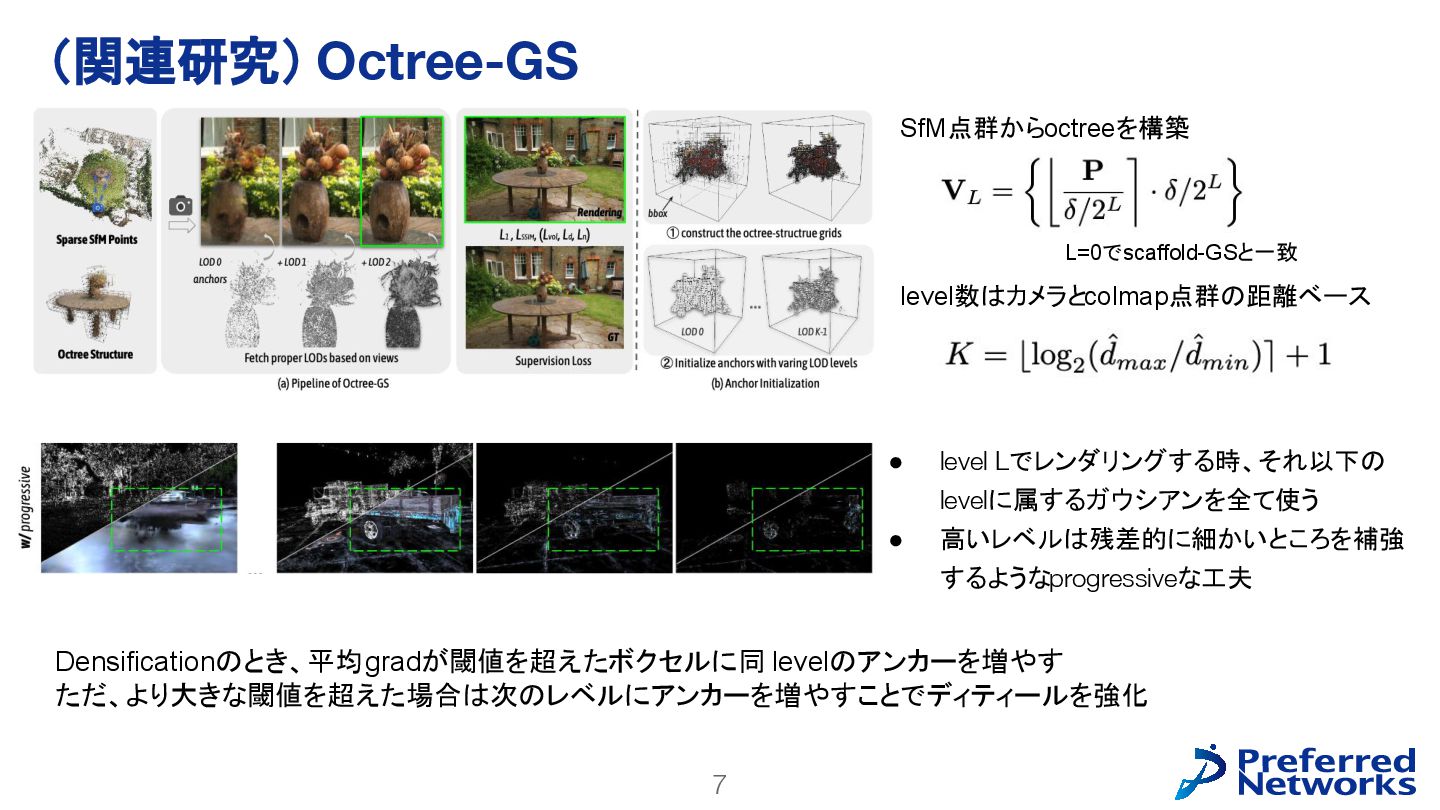
7 (関連研究) Octree-GS SfM点群からoctreeを構築 level数はカメラとcolmap点群の距離ベース L=0でscaffold-GSと一致 • level Lでレンダリングする時、それ以下の levelに属するガウシアンを全て使う
• 高いレベルは残差的に細かいところを補強 するようなprogressiveな工夫 Densificationのとき、平均gradが閾値を超えたボクセルに同 levelのアンカーを増やす ただ、より大きな閾値を超えた場合は次のレベルにアンカーを増やすことでディティールを強化
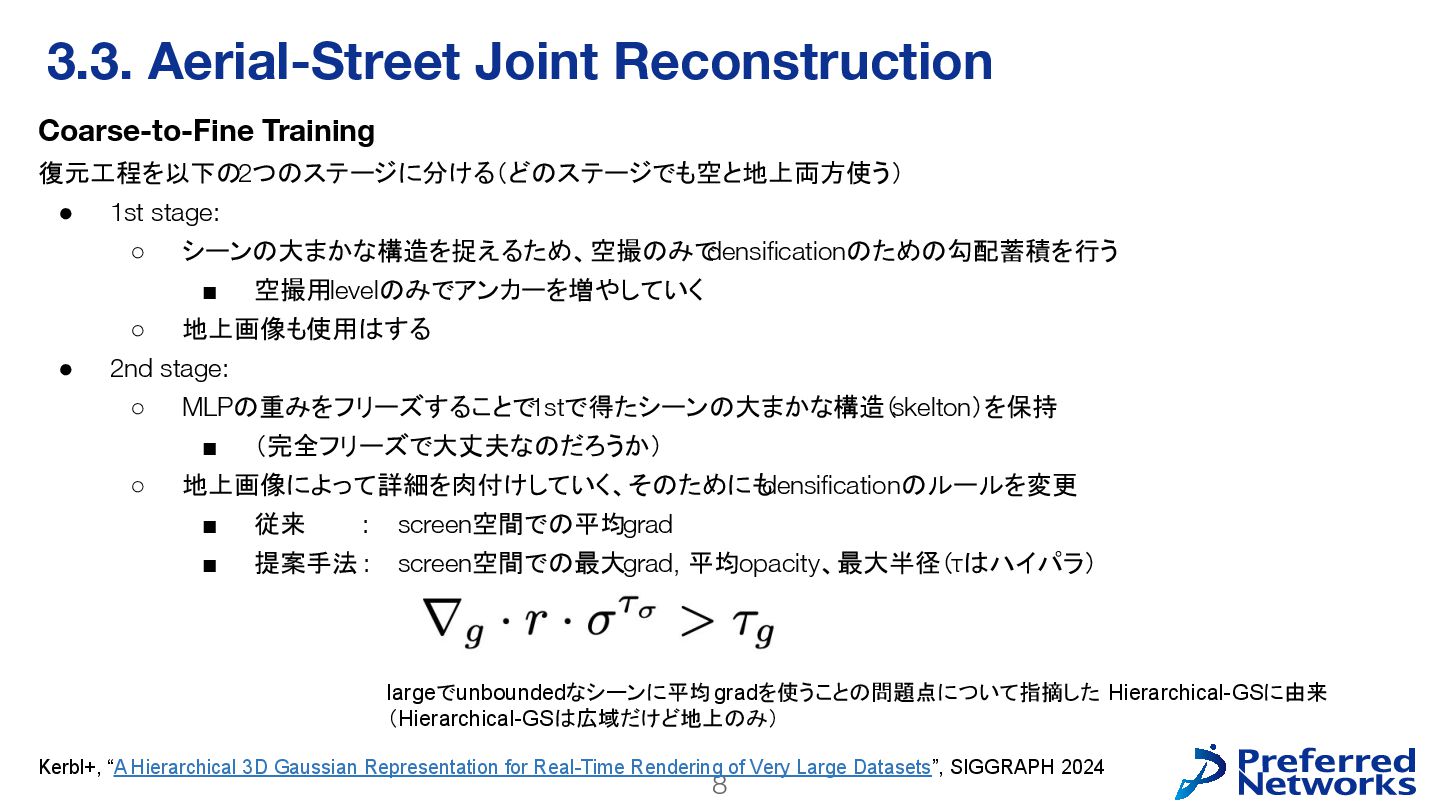
8 Coarse-to-Fine Training 復元工程を以下の2つのステージに分ける(どのステージでも空と地上両方使う) • 1st stage: ◦ シーンの大まかな構造を捉えるため、空撮のみで densificationのための勾配蓄積を行う
▪ 空撮用levelのみでアンカーを増やしていく ◦ 地上画像も使用はする • 2nd stage: ◦ MLPの重みをフリーズすることで 1stで得たシーンの大まかな構造( skelton)を保持 ▪ (完全フリーズで大丈夫なのだろうか) ◦ 地上画像によって詳細を肉付けしていく、そのためにも densificationのルールを変更 ▪ 従来 : screen空間での平均grad ▪ 提案手法 : screen空間での最大grad, 平均opacity、最大半径(τはハイパラ) largeでunboundedなシーンに平均 gradを使うことの問題点について指摘した Hierarchical-GSに由来 (Hierarchical-GSは広域だけど地上のみ) Kerbl+, “A Hierarchical 3D Gaussian Representation for Real-Time Rendering of Very Large Datasets”, SIGGRAPH 2024 3.3. Aerial-Street Joint Reconstruction
9 Balanced Camera Distribution 多くのデータセットで空撮と比べて地上の枚数が多いため、同じバランスでサンプルしてしまうと空から見たときにボ ヤけたり細かい構造が捉えられない 以下の式により地上と空撮のサンプリングを調整 前頁のCoarse-to-Fine Trainingと併せて、まず空撮メインで全体の構造を捉え、後半では地上メインで詳細を復元し ていく気持ち
3.3. Aerial-Street Joint Reconstruction - 1st stage: R=2、つまり2/3の確率で空撮を使う - 2nd stage: R=1、つまり半々
10 Multi-resolution LOD Construction Octree-GS(次ページ)というScaffold-GSにLoD要素を入れた手法を利用 Octree-GSをAerial-to-Ground化するにあたって • 全K階層のうち空撮用level K aerial
を設定 • 1st stageではK aerial のみ使う、アンカーのdensificationも同じレベルでのみ増やす • 2nd stageでは全部使う、さらに「勾配が大きい場合より高いレベルのアンカーを増やす」という Octree-GSで提案された機能も解禁 3.3. Aerial-Street Joint Reconstruction
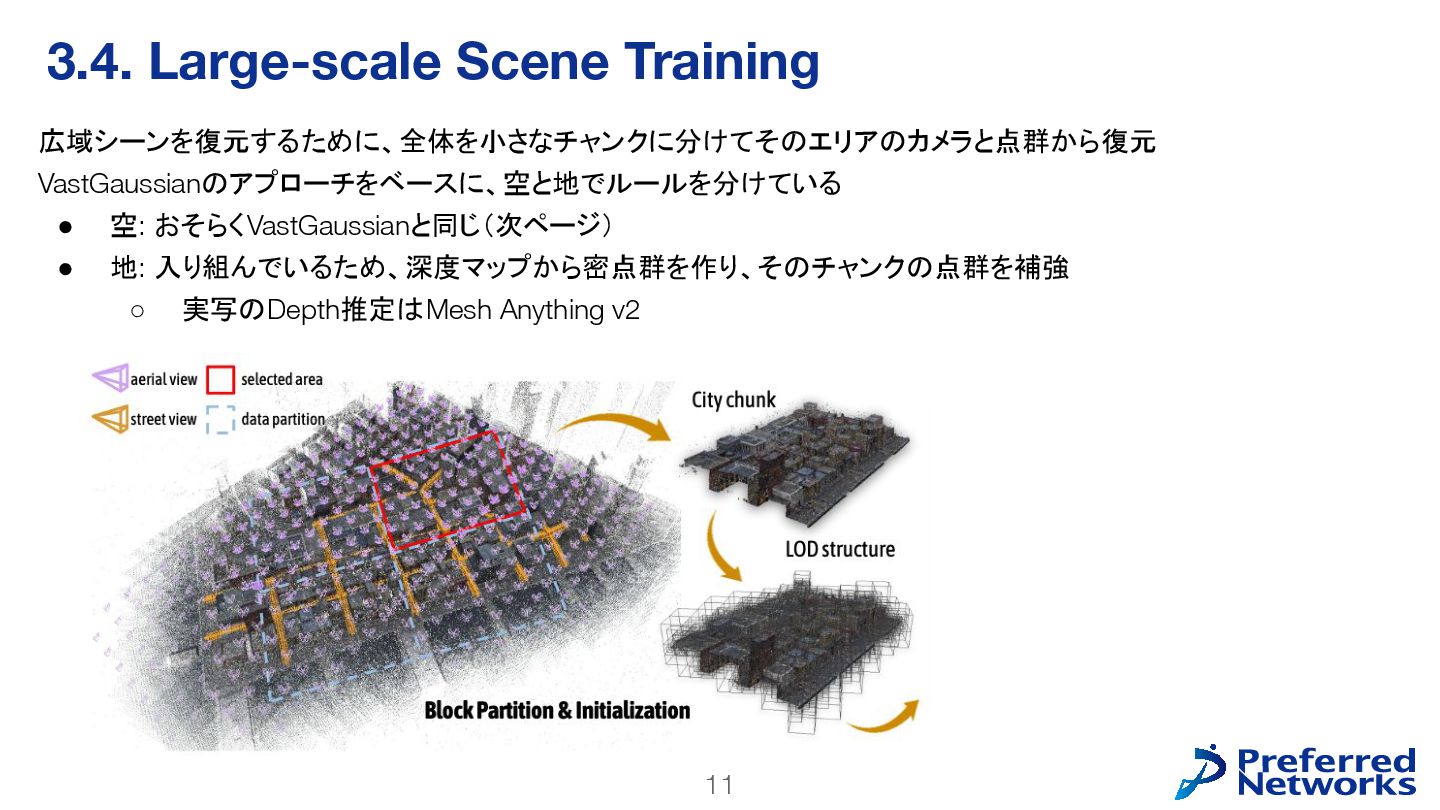
11 広域シーンを復元するために、全体を小さなチャンクに分けてそのエリアのカメラと点群から復元 VastGaussianのアプローチをベースに、空と地でルールを分けている • 空: おそらくVastGaussianと同じ(次ページ) • 地: 入り組んでいるため、深度マップから密点群を作り、そのチャンクの点群を補強 ◦
実写のDepth推定はMesh Anything v2 3.4. Large-scale Scene Training
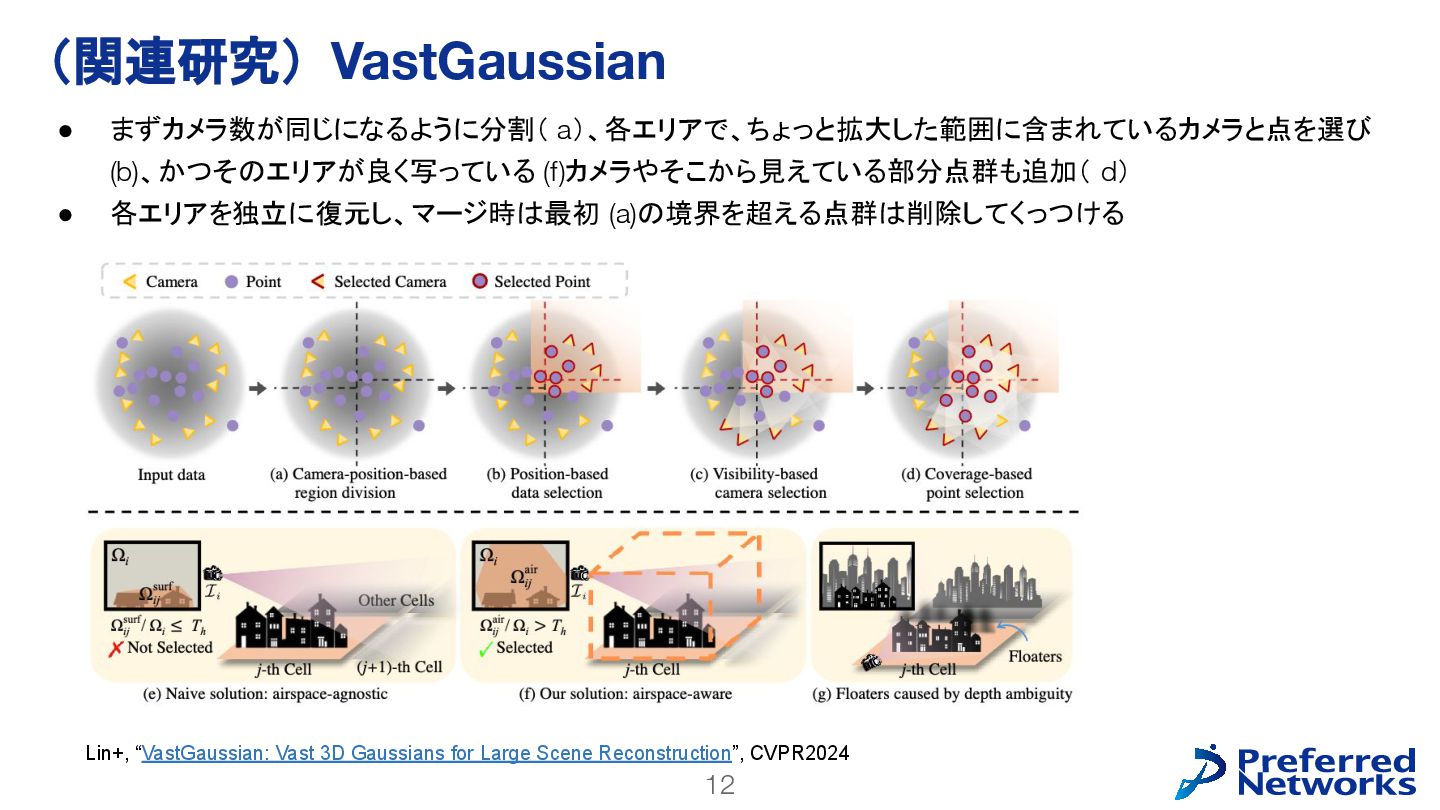
12 • まずカメラ数が同じになるように分割( a)、各エリアで、ちょっと拡大した範囲に含まれているカメラと点を選び (b)、かつそのエリアが良く写っている (f)カメラやそこから見えている部分点群も追加( d) • 各エリアを独立に復元し、マージ時は最初 (a)の境界を超える点群は削除してくっつける
(関連研究) VastGaussian Lin+, “VastGaussian: Vast 3D Gaussians for Large Scene Reconstruction”, CVPR2024
13 3.5. Loss Function and Regularization よくあるPhotometric loss
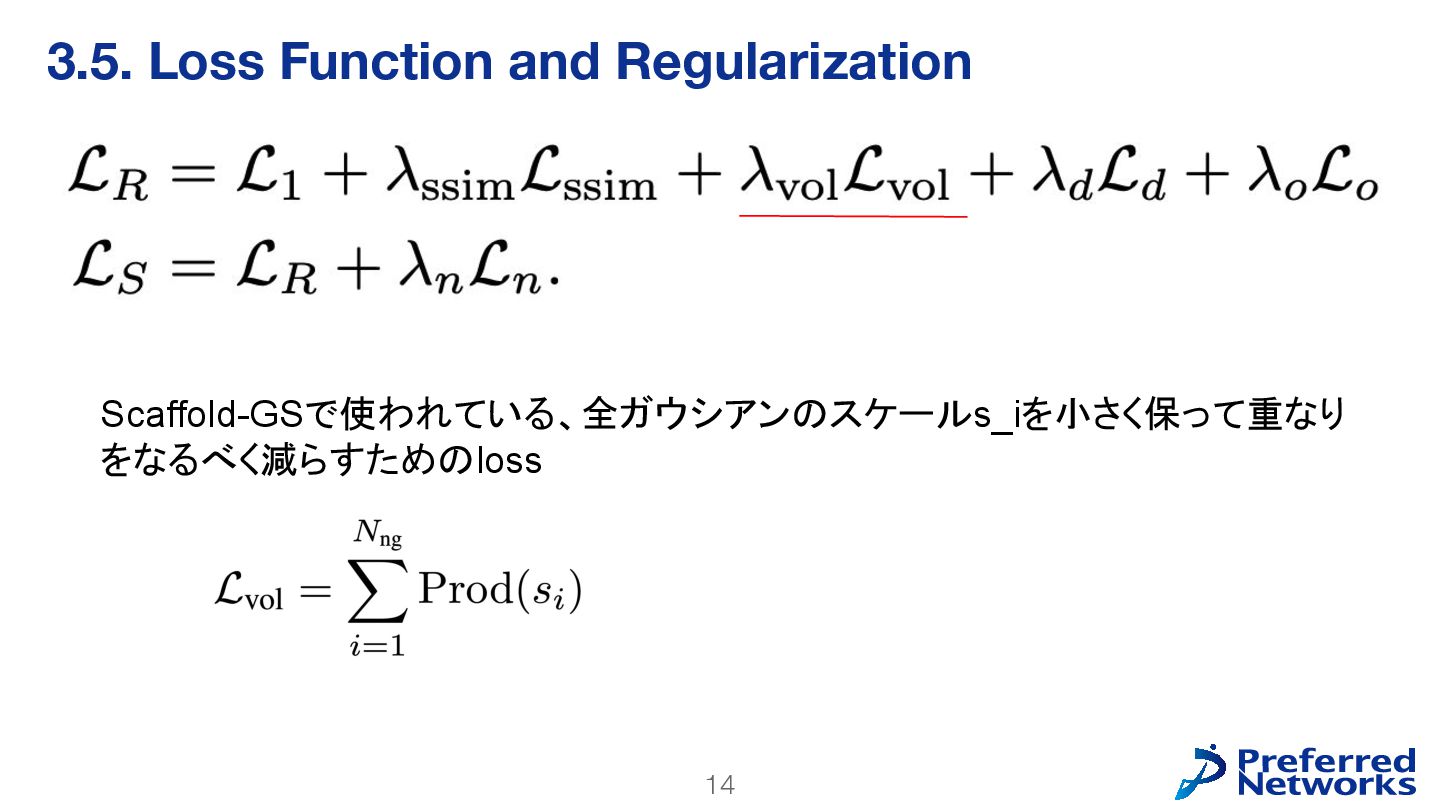
14 3.5. Loss Function and Regularization Scaffold-GSで使われている、全ガウシアンのスケールs_iを小さく保って重なり をなるべく減らすためのloss
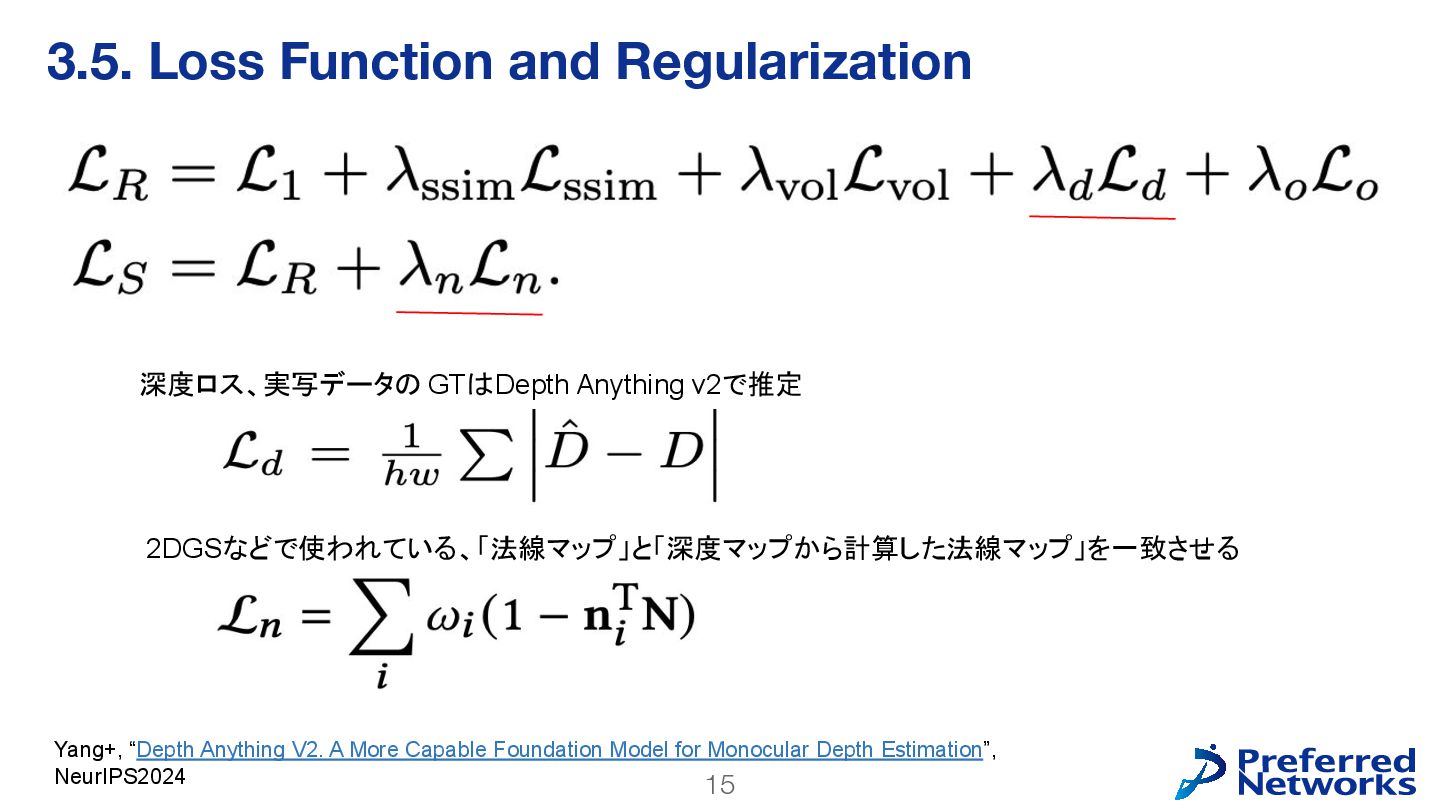
15 3.5. Loss Function and Regularization 深度ロス、実写データの GTはDepth Anything v2で推定
Yang+, “Depth Anything V2. A More Capable Foundation Model for Monocular Depth Estimation”, NeurIPS2024 2DGSなどで使われている、「法線マップ」と「深度マップから計算した法線マップ」を一致させる
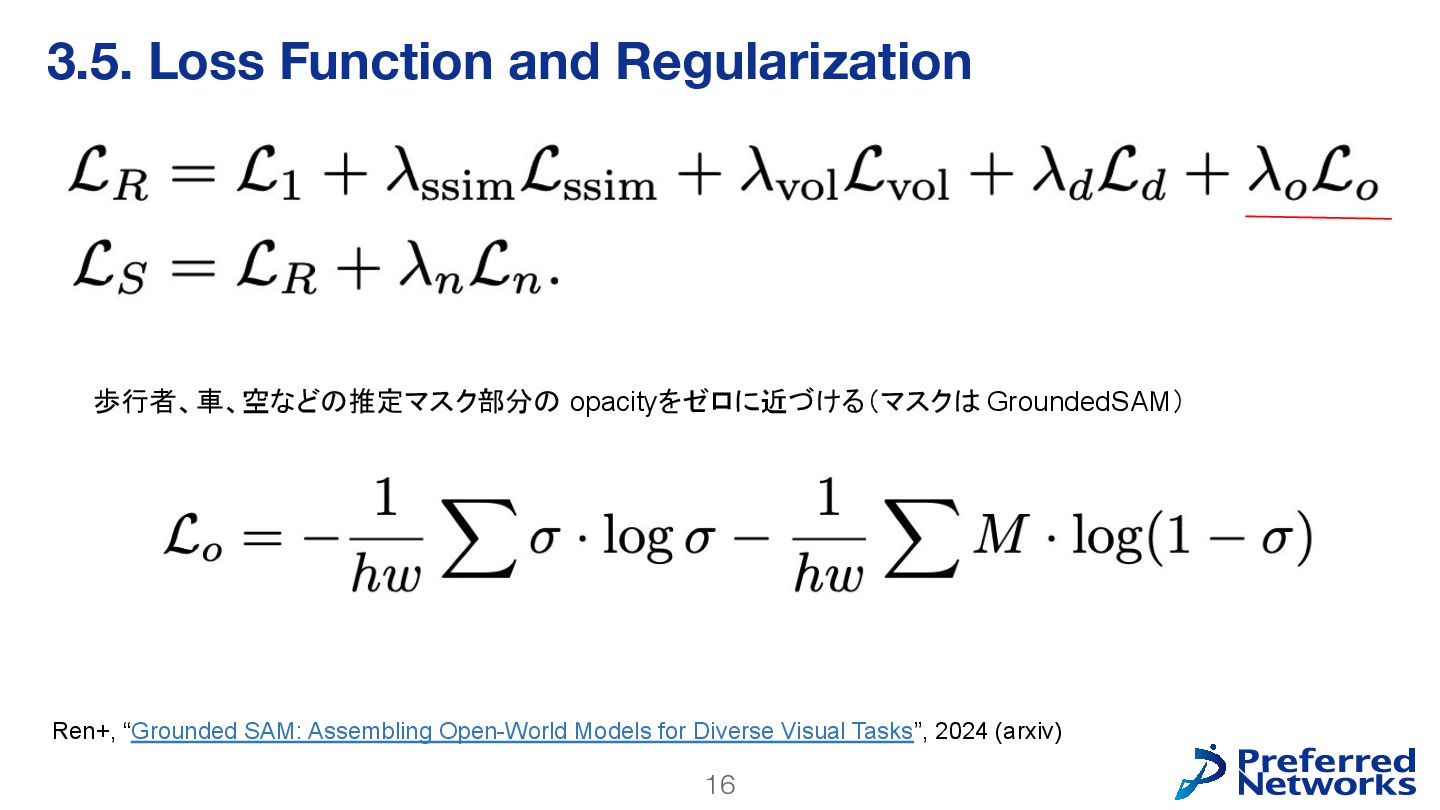
16 3.5. Loss Function and Regularization 歩行者、車、空などの推定マスク部分の opacityをゼロに近づける(マスクは GroundedSAM) Ren+,
“Grounded SAM: Assembling Open-World Models for Diverse Visual Tasks”, 2024 (arxiv)
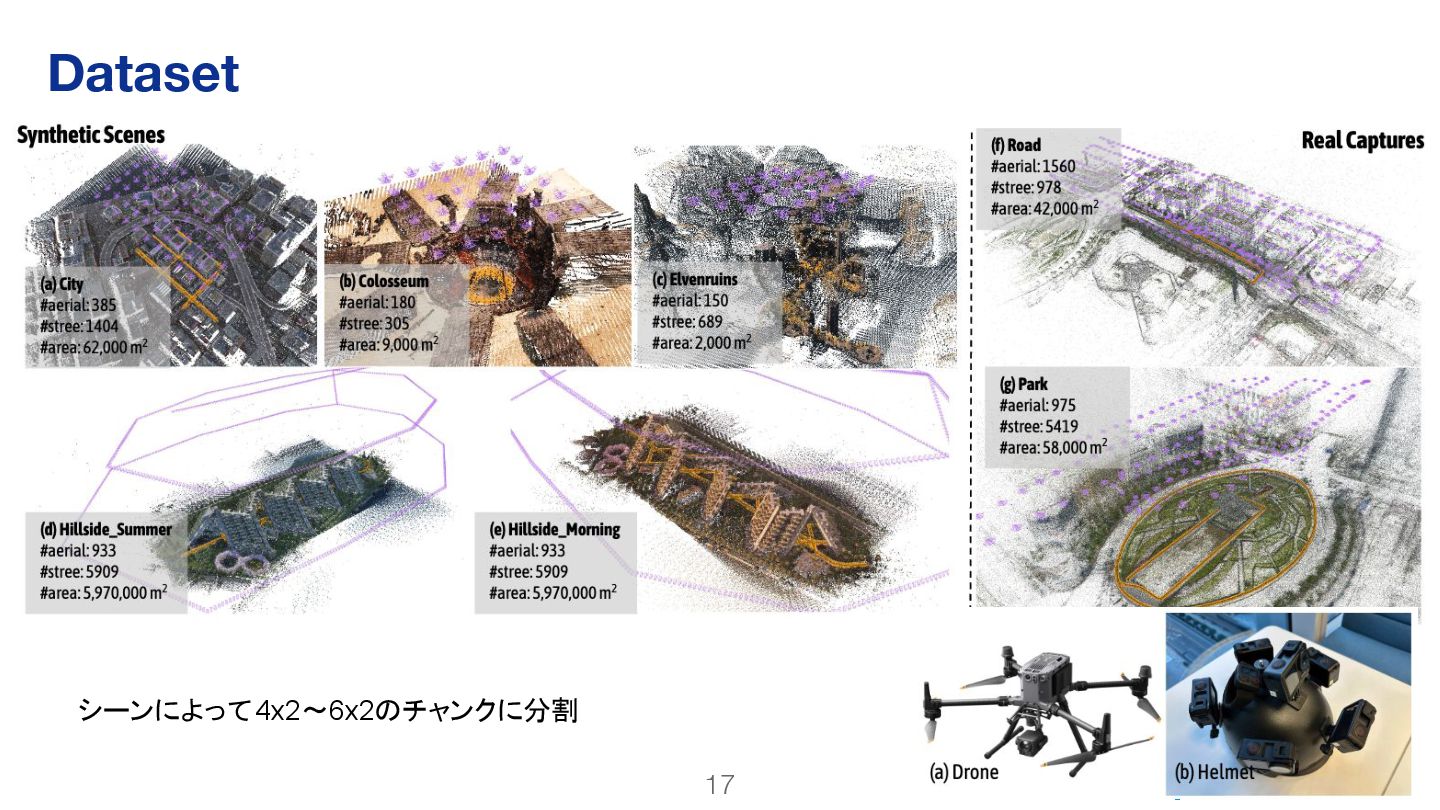
17 Dataset シーンによって4x2〜6x2のチャンクに分割
18 実験結果
19 いろいろ比較
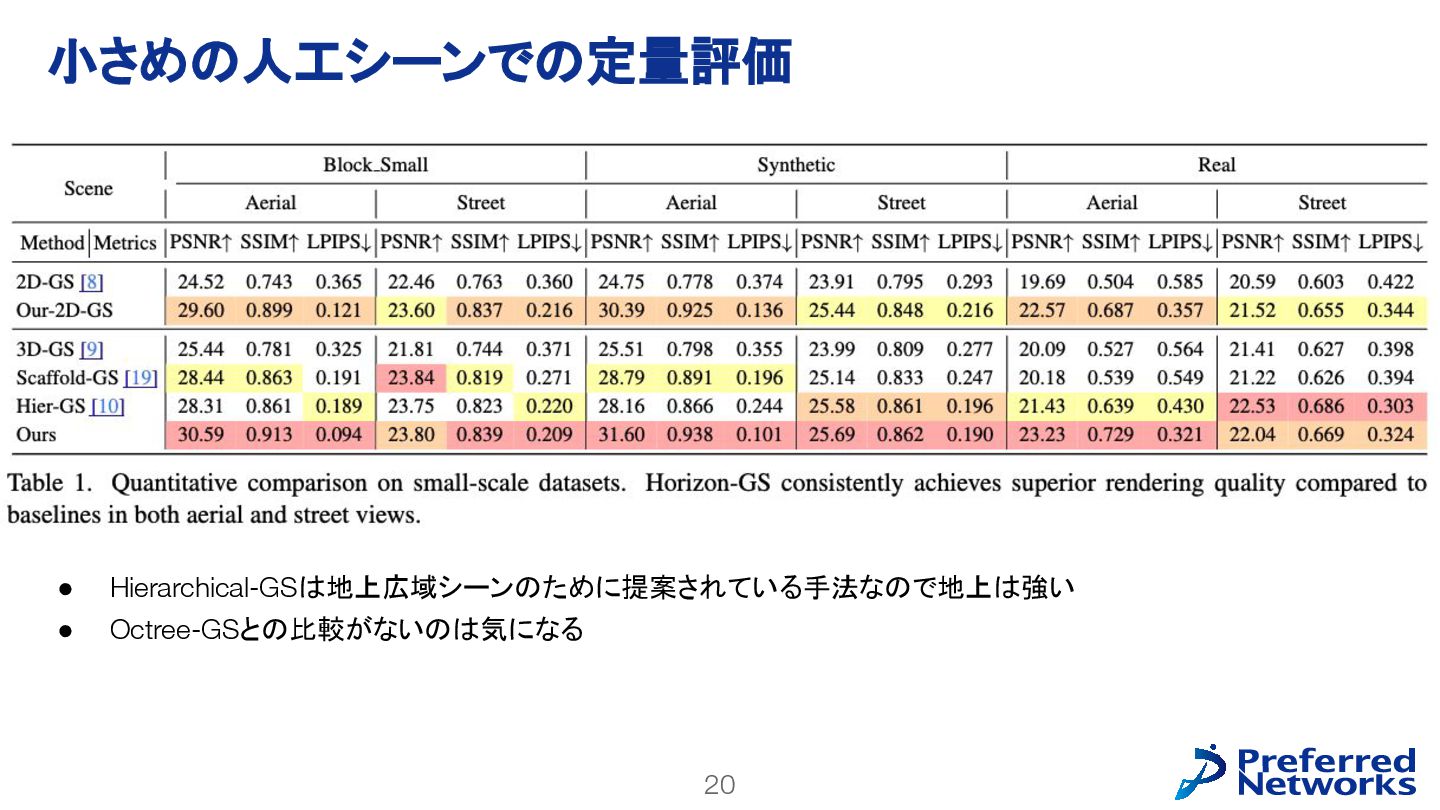
20 • Hierarchical-GSは地上広域シーンのために提案されている手法なので地上は強い • Octree-GSとの比較がないのは気になる 小さめの人工シーンでの定量評価
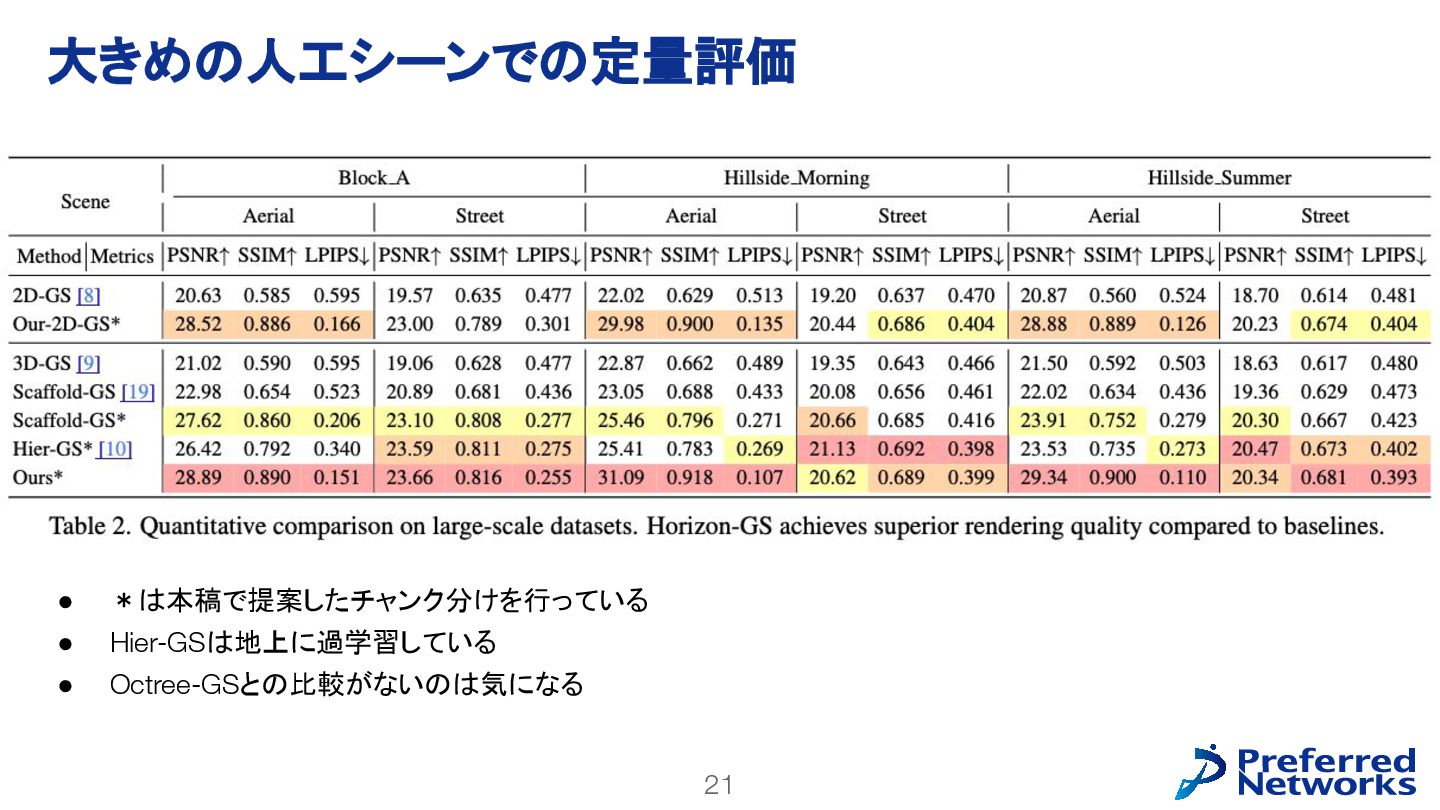
21 • *は本稿で提案したチャンク分けを行っている • Hier-GSは地上に過学習している • Octree-GSとの比較がないのは気になる 大きめの人工シーンでの定量評価
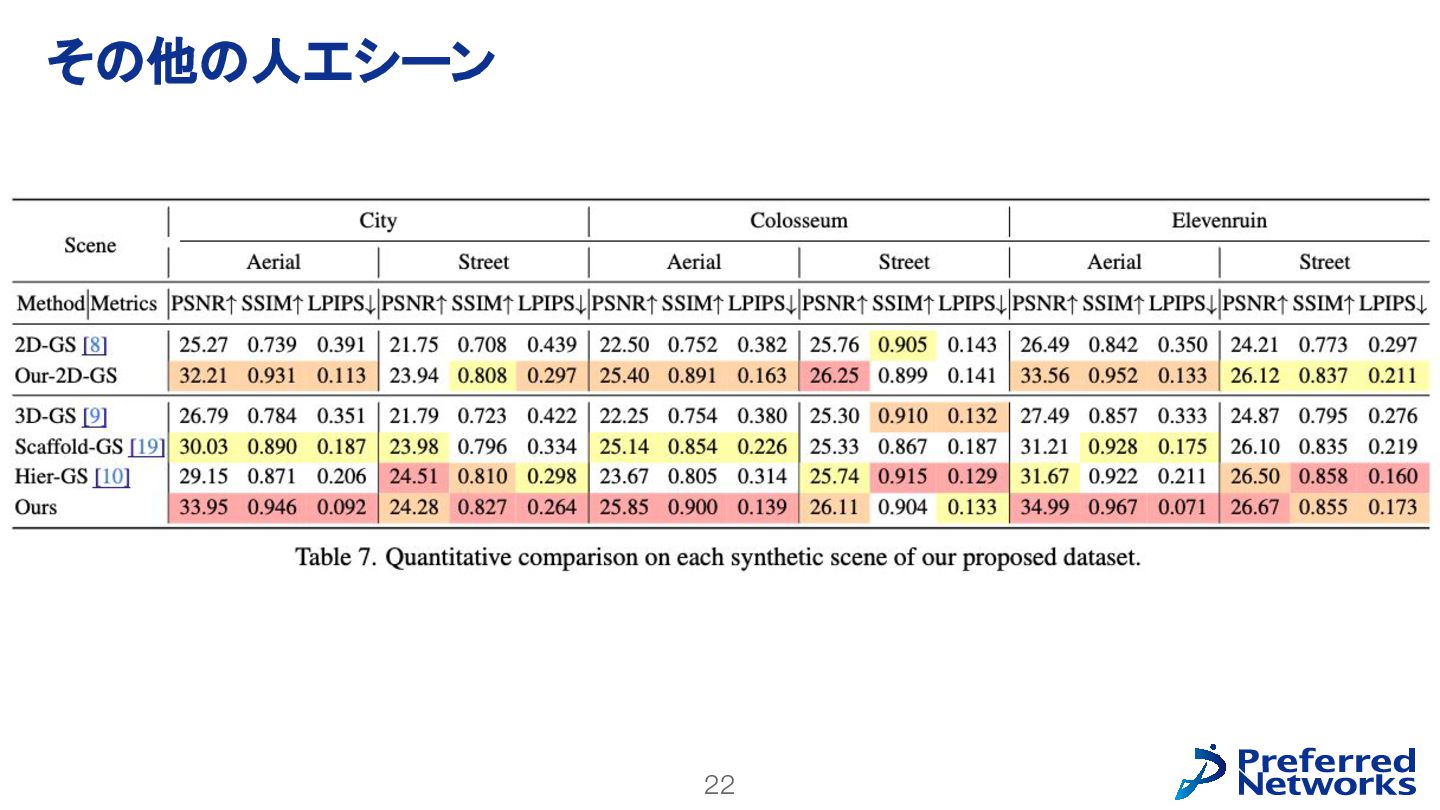
22 その他の人工シーン
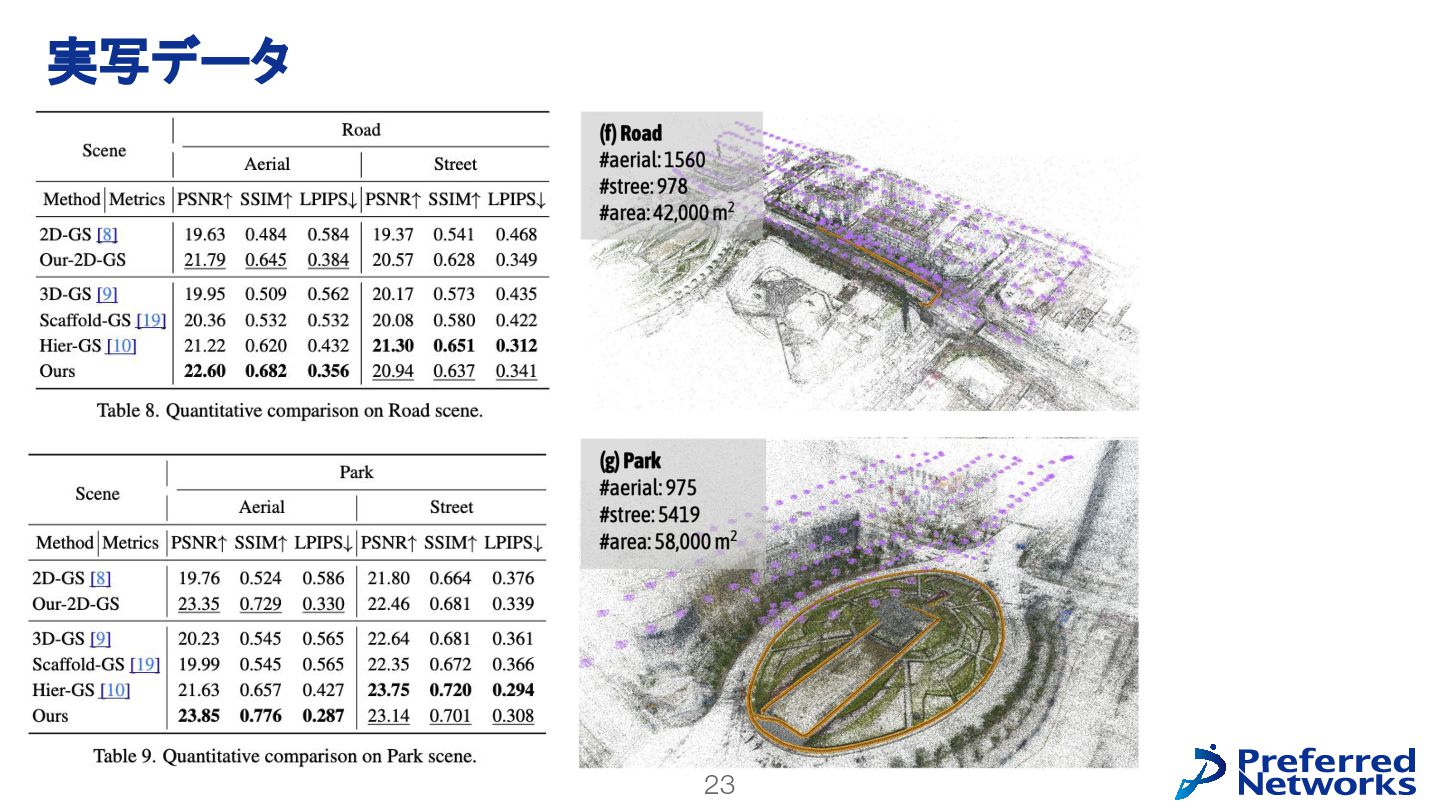
23 実写データ
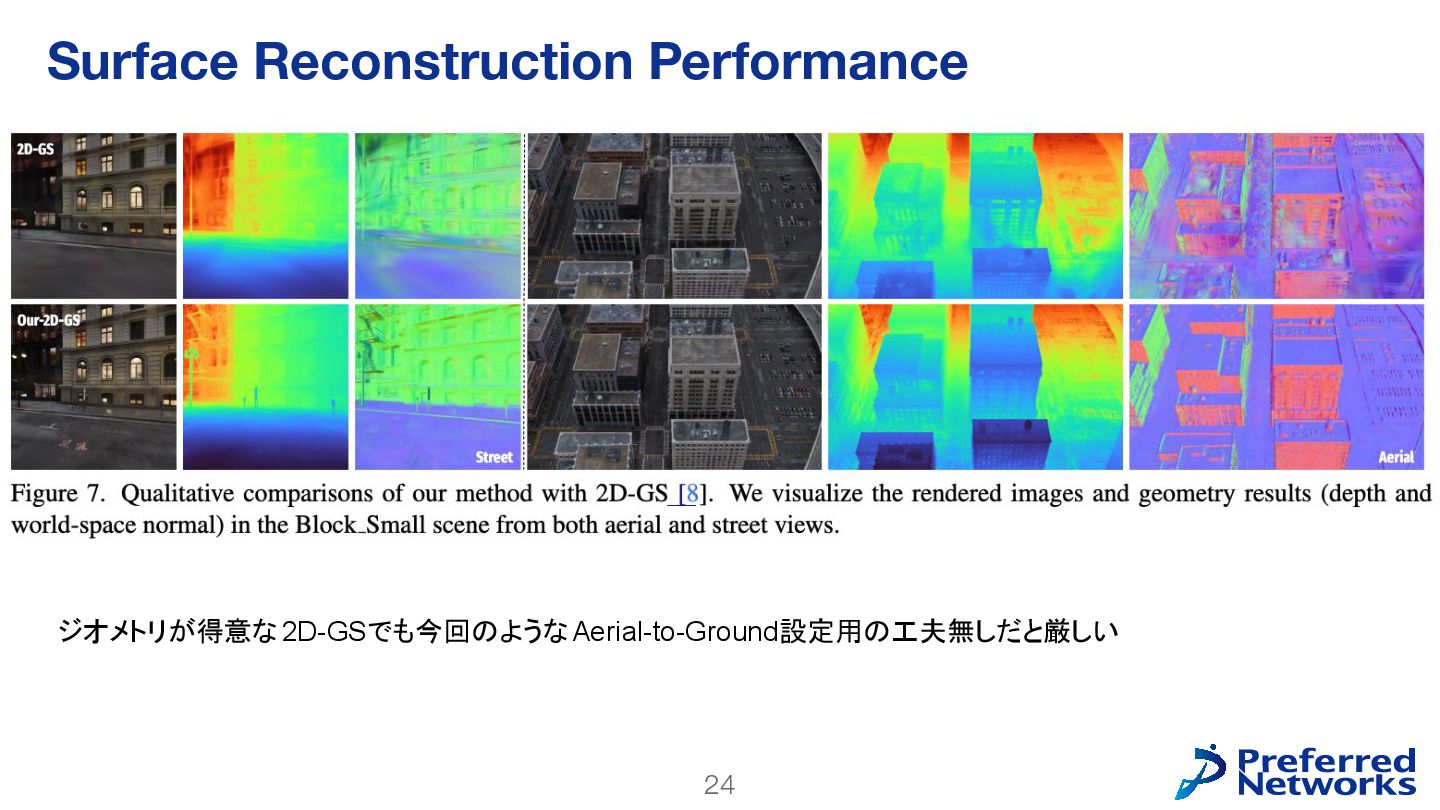
24 Surface Reconstruction Performance ジオメトリが得意な2D-GSでも今回のようなAerial-to-Ground設定用の工夫無しだと厳しい
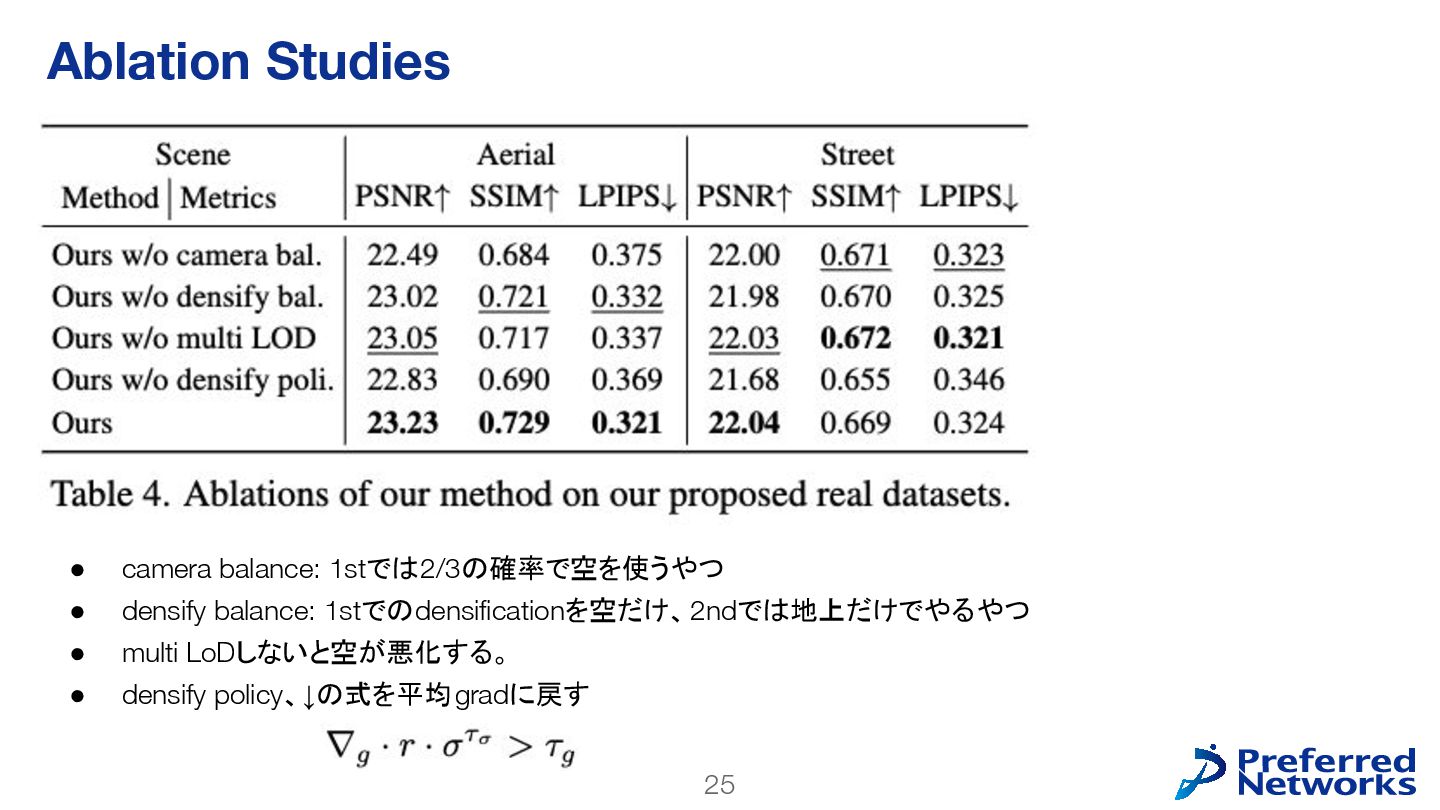
25 • camera balance: 1stでは2/3の確率で空を使うやつ • densify balance: 1stでのdensificationを空だけ、2ndでは地上だけでやるやつ •
multi LoDしないと空が悪化する。 • densify policy、↓の式を平均gradに戻す Ablation Studies
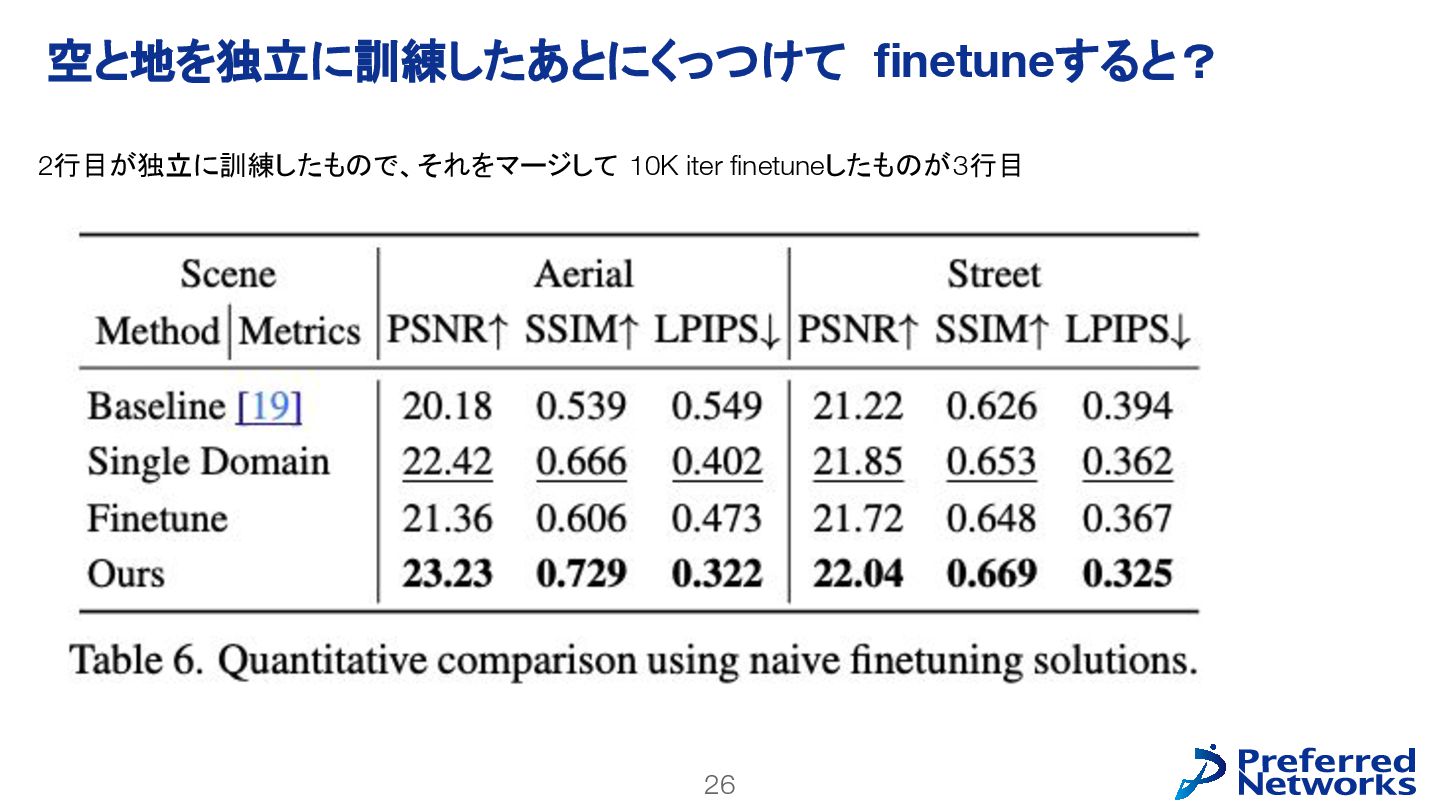
26 2行目が独立に訓練したもので、それをマージして 10K iter finetuneしたものが3行目 空と地を独立に訓練したあとにくっつけて finetuneすると?
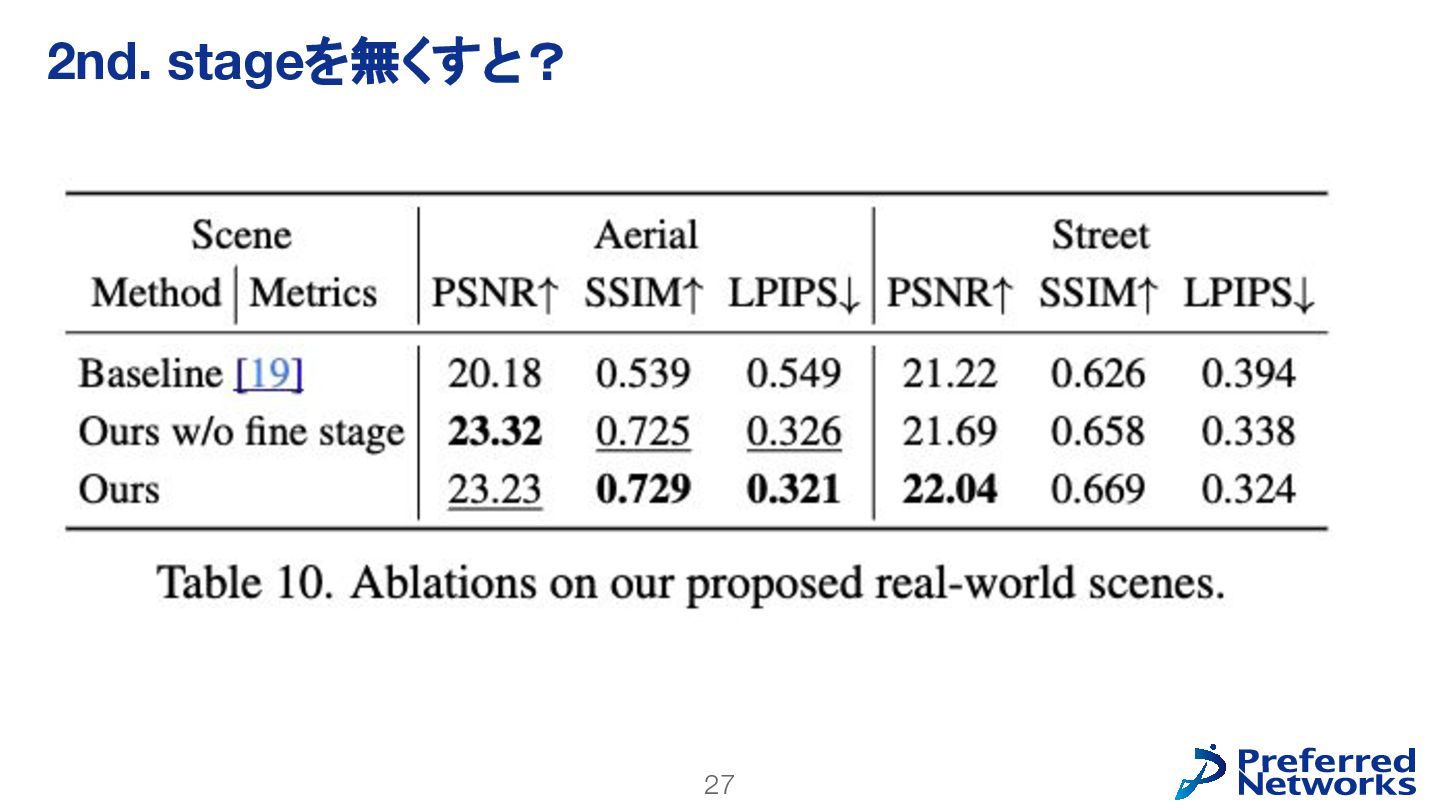
27 2nd. stageを無くすと?
28 • Scaffold-GS、Octree-GSをベースに各所にAerial-to-Groundなデータで復元するための工夫たち ◦ 3.3. Aerial-Street Joint Reconstruction ▪ Coarse-to-Fine
Training. • 1st stageで空撮基準でdensification • 2nd stageは各種MLPを固定、densification基準も変更 ▪ Balanced Camera Distribution. • 1st stageでは空撮を多く使う、2ndで半々 ▪ Multi-resolution LOD Construction. • 1st stageでは空用LoDのみ使用、densificationは同レベルのみ • 2nd stageでOctree-GS通り全部で ◦ 3.4. Large-scale Scene Training ▪ 全体を複数のチャンクに分けるとき、地上視点の点群を推定depthから補強 まとめ
29
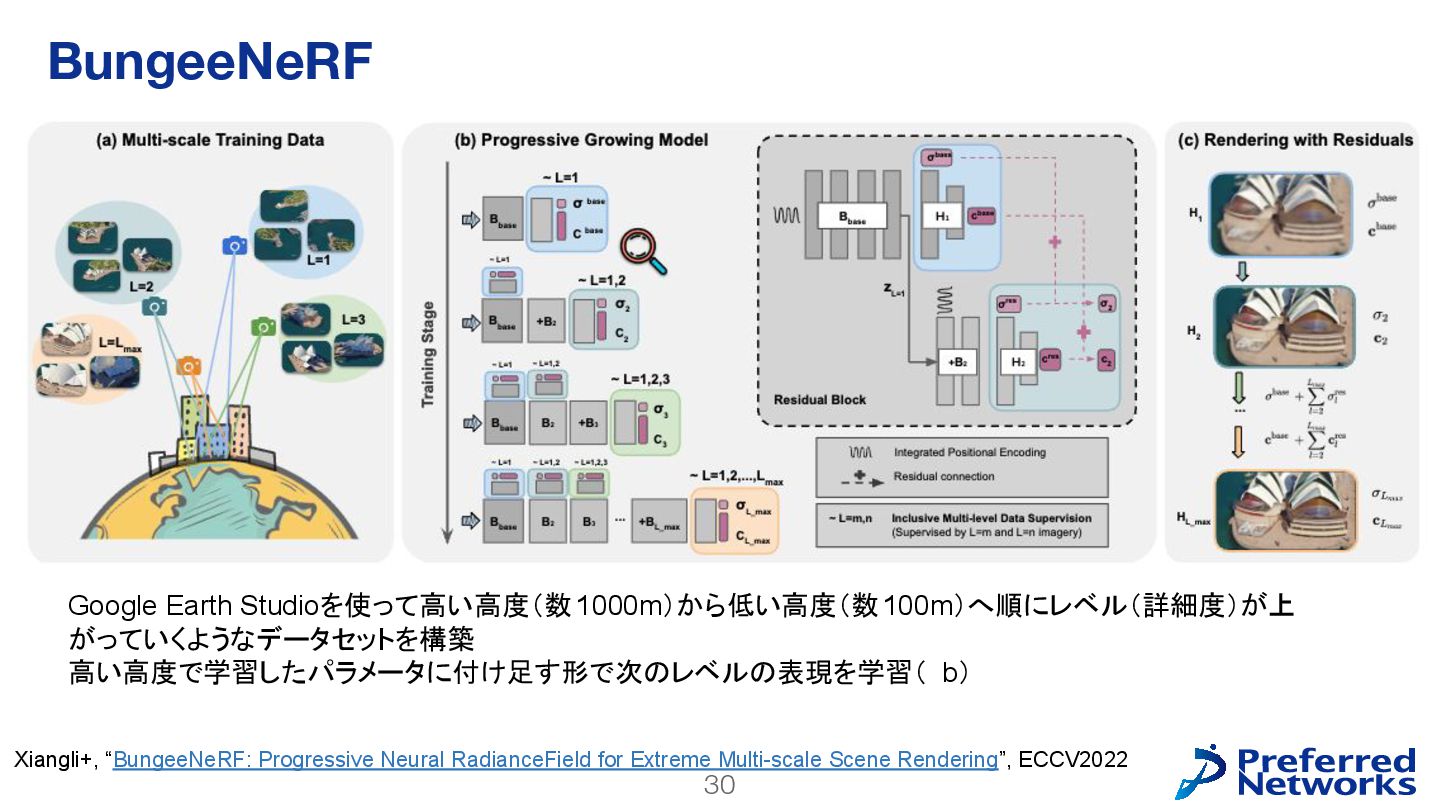
30 BungeeNeRF Xiangli+, “BungeeNeRF: Progressive Neural RadianceField for Extreme Multi-scale
Scene Rendering”, ECCV2022 Google Earth Studioを使って高い高度(数 1000m)から低い高度(数100m)へ順にレベル(詳細度)が上 がっていくようなデータセットを構築 高い高度で学習したパラメータに付け足す形で次のレベルの表現を学習( b)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}