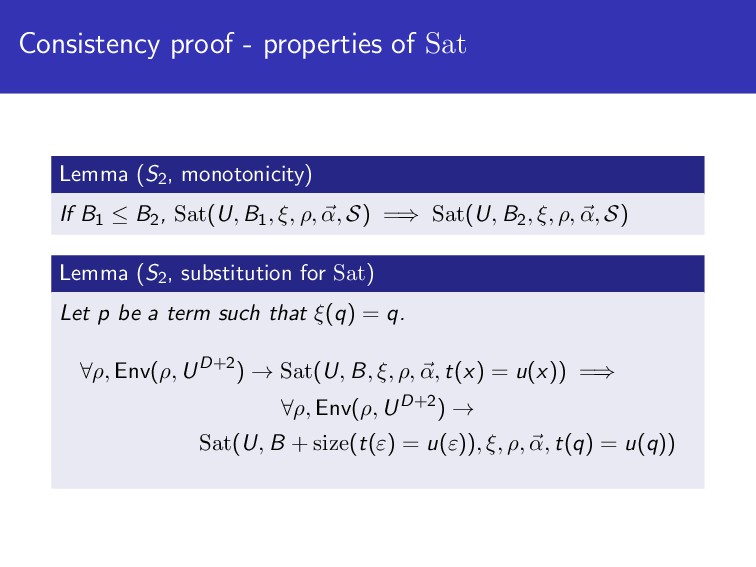
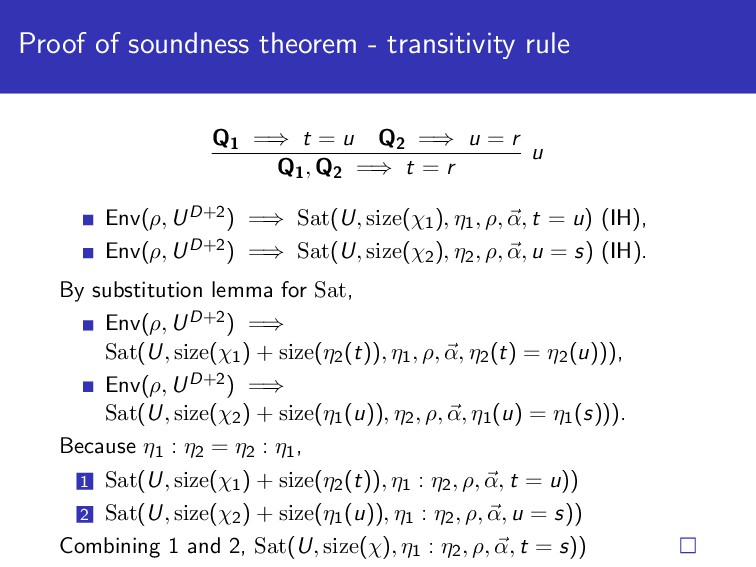
= u Q2 =⇒ u = r Q1, Q2 =⇒ t = r u Env(ρ, UD+2) =⇒ Sat(U, size(χ1), η1, ρ, α, t = u) (IH), Env(ρ, UD+2) =⇒ Sat(U, size(χ2), η2, ρ, α, u = s) (IH). By substitution lemma for Sat, Env(ρ, UD+2) =⇒ Sat(U, size(χ1) + size(η2(t)), η1, ρ, α, η2(t) = η2(u))), Env(ρ, UD+2) =⇒ Sat(U, size(χ2) + size(η1(u)), η2, ρ, α, η1(u) = η1(s))). Because η1 : η2 = η2 : η1, 1 Sat(U, size(χ1) + size(η2(t)), η1 : η2, ρ, α, t = u)) 2 Sat(U, size(χ2) + size(η1(u)), η1 : η2, ρ, α, u = s)) Combining 1 and 2, Sat(U, size(χ), η1 : η2, ρ, α, t = s))
{kind=link}
{kind=link}
{kind=link}
![Definition of Buss’s Si 2 [Buss, 1986] Si 2 is](https://files.speakerdeck.com/presentations/962f976af0074ac1a355256526f0a7e3/slide_3.jpg){kind=link}
![Definition of Cook’s PV [Cook, 1975] 1 Defining axioms for](https://files.speakerdeck.com/presentations/962f976af0074ac1a355256526f0a7e3/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Inference: quantifier reordering Q1, x(x), y([x, ]y), Q2 =⇒ φ](https://files.speakerdeck.com/presentations/962f976af0074ac1a355256526f0a7e3/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Approximate value: g-numerals Definition ([Beckmann, 2002, Yamagata, 2018]) g-numerals v](https://files.speakerdeck.com/presentations/962f976af0074ac1a355256526f0a7e3/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Consistency proof - preliminaries Definition [q1/x1] · · · [qd](https://files.speakerdeck.com/presentations/962f976af0074ac1a355256526f0a7e3/slide_34.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}