Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
第10回Net講座2018
Search
北海道科学大学 電子計算機研究部
December 04, 2018
Education
98
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
第10回Net講座2018
北海道科学大学 電子計算機研究部
December 04, 2018
More Decks by 北海道科学大学 電子計算機研究部
See All by 北海道科学大学 電子計算機研究部
第12回Network講座2019
densan
1
67
第11回Network講座2019
densan
0
80
第10回Network講座2019
densan
0
56
第09回Network講座2019
densan
1
170
第08回Network講座2019
densan
0
58
第07回Network講座2019
densan
0
56
第06回Network講座2019
densan
0
79
第05回Network講座2019
densan
0
56
第04回Network講座2019
densan
0
120
Other Decks in Education
See All in Education
Data Management and Analytics Specialisation
signer
PRO
0
1.9k
モブ社員がモブエンジニアを名乗って得られたこと_20260413
masakiokuda
4
560
Lectura 2 (PIT : Python Basico)
robintux
0
380
吉祥寺.pmは1つじゃない — 複数イベント並走運営の12年 —
magnolia
0
1.3k
2026年度春学期 統計学 第13回 不確かな測定の不確かさを測る ― 不偏分散とt分布 (2026. 6. 25)
akiraasano
PRO
1
130
Implicit and Cross-Device Interaction - Lecture 10 - Next Generation User Interfaces (4018166FNR)
signer
PRO
2
2.3k
解決策を教えても次期リーダーは育たない ─ 器の発達に伴走するために / Partnering with leaders in their vertical development
matsu0228
1
570
Portable & Reproducible Research Environments in the Age of AI Agents
denkiwakame
0
520
Visionary Initiative: Materials-Positive Society — Evolving “Things,” empowering a positive society | Science Tokyo
sciencetokyo
PRO
0
140
Lectura 1 (PIT : Python Basico)
robintux
0
390
2026年度春学期 統計学 第10回 分布の推測とは - 標本調査,度数分布と確率分布 (2026. 6. 4)
akiraasano
PRO
0
160
Soluciones al examen de Geografía 2026. JUNIO (Convocatoria Ordinaria)
juanmartin2026
1
6.8k
Featured
See All Featured
Practical Orchestrator
shlominoach
191
11k
Producing Creativity
orderedlist
PRO
348
40k
Build The Right Thing And Hit Your Dates
maggiecrowley
39
3.3k
Ten Tips & Tricks for a 🌱 transition
stuffmc
0
150
The World Runs on Bad Software
bkeepers
PRO
72
12k
Designing for Performance
lara
611
70k
Documentation Writing (for coders)
carmenintech
77
5.4k
Claude Code のすすめ
schroneko
67
230k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2k
The Impact of AI in SEO - AI Overviews June 2024 Edition
aleyda
5
1.1k
Collaborative Software Design: How to facilitate domain modelling decisions
baasie
1
270
How Fast Is Fast Enough? [PerfNow 2025]
tammyeverts
3
660
Transcript
ネットワークチーム 第10回 北海道科学大学 電子計算機研究部
INDEX ⚫ Python - セットアップ - 簡単な説明 ⚫ 演習 2
Python
Python について ⚫ 一番人気のプログラミング言語 ⚫ Javascript と同様のスクリプト言語 ⚫ 読みやすい&書きやすい ⚫
ブロックは { } ではなくインデント ⚫ サーバーサイドのプログラムに使用 4
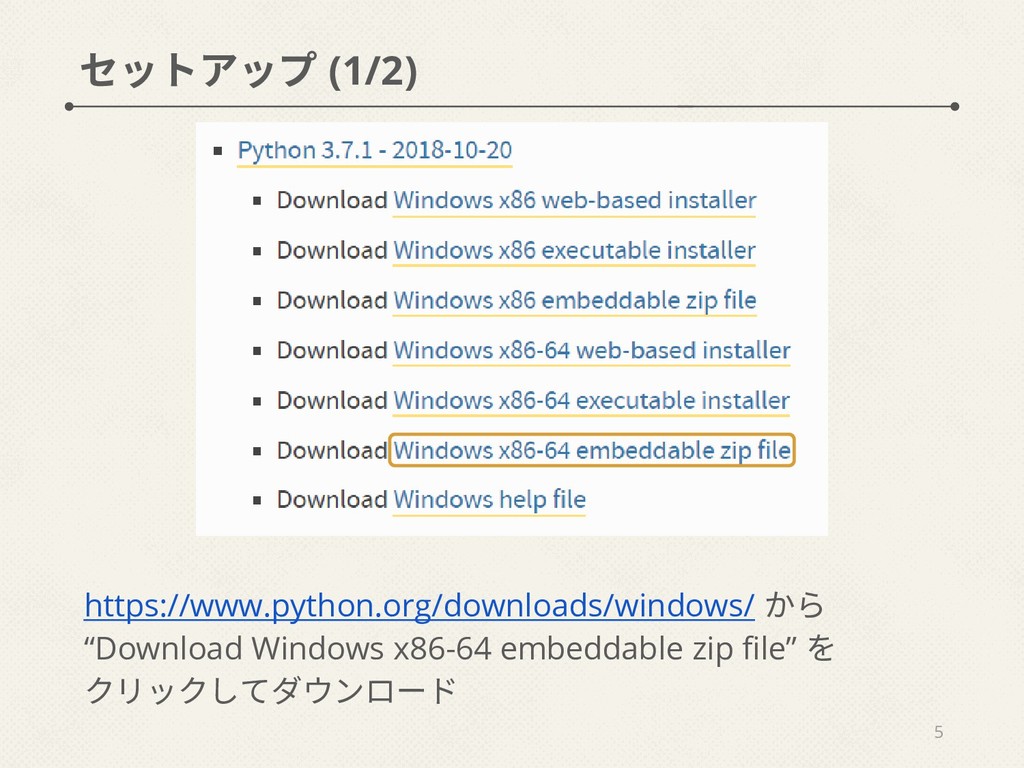
セットアップ (1/2) https://www.python.org/downloads/windows/ から “Download Windows x86-64 embeddable zip file”
を クリックしてダウンロード 5
セットアップ (2/2) 適当なフォルダに解凍し “Python.exe” を実行 6 入力してみよう print(“Hello”)
変数について variable
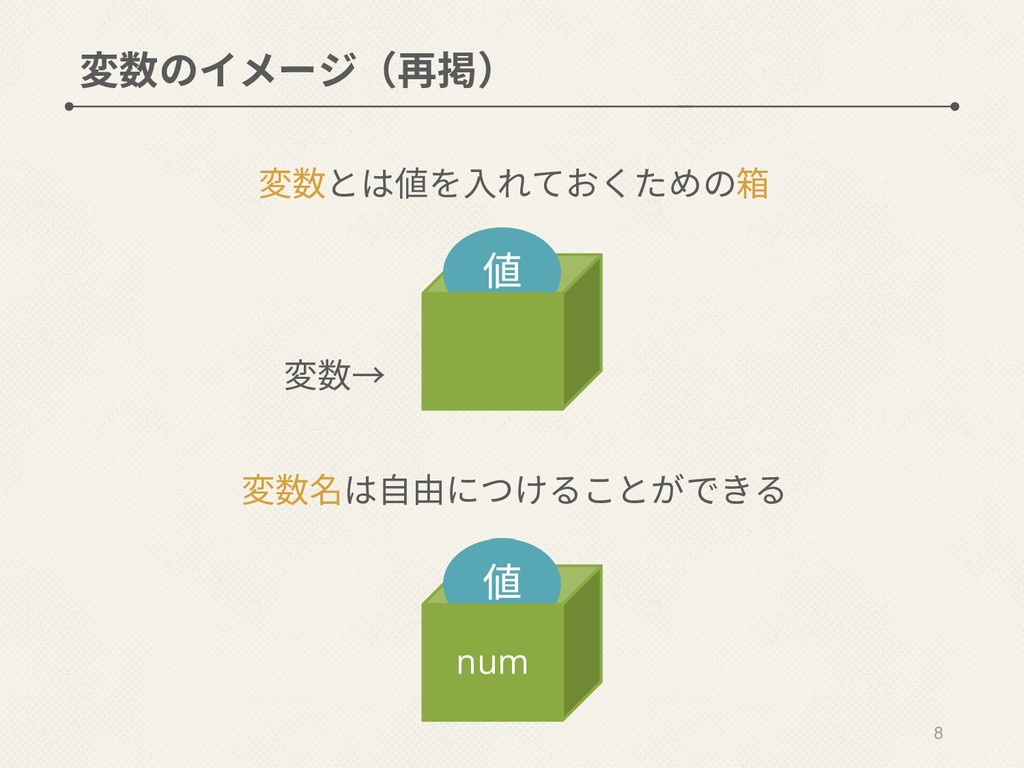
変数のイメージ(再掲) 変数とは値を入れておくための箱 8 変数名は自由につけることができる num 変数→
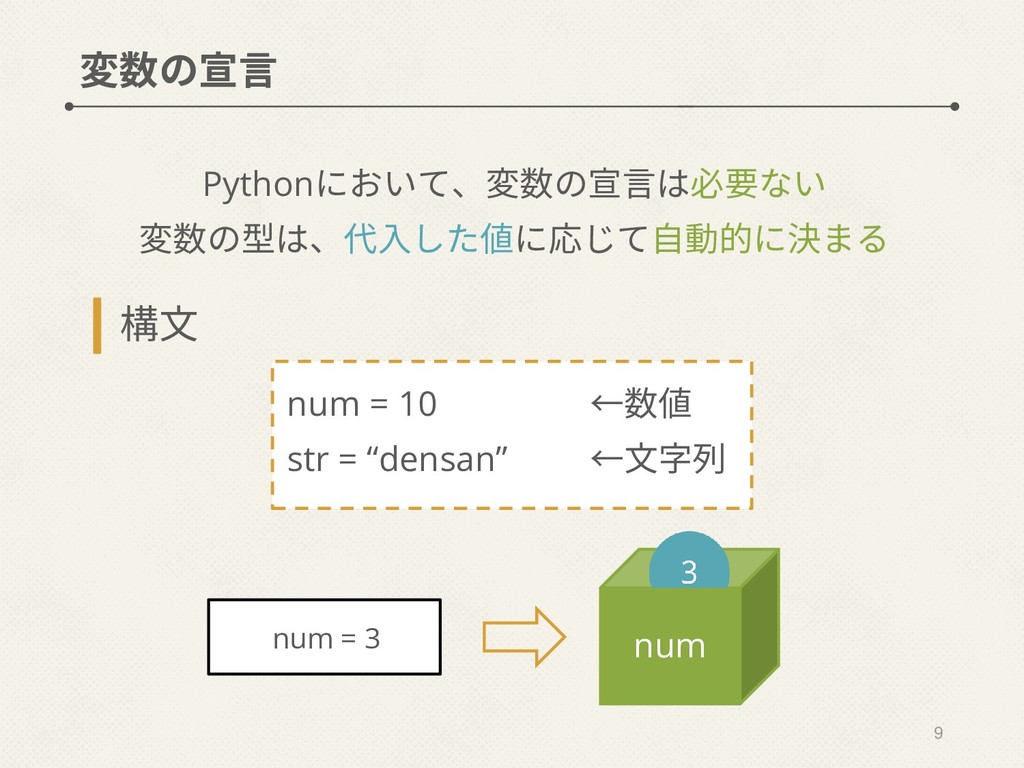
変数の宣言 Pythonにおいて、変数の宣言は必要ない 変数の型は、代入した値に応じて自動的に決まる 9 num = 10 ←数値 str =
“densan” ←文字列 num = 3 構文 num
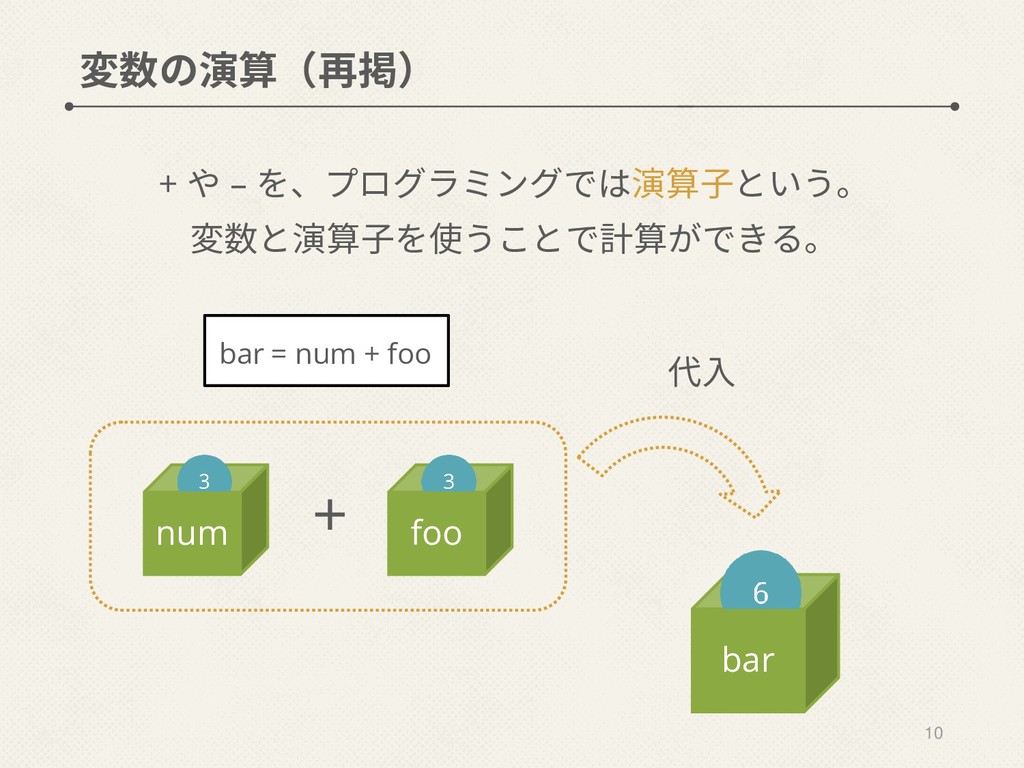
変数の演算(再掲) + や – を、プログラミングでは演算子という。 変数と演算子を使うことで計算ができる。 10 num bar =
num + foo bar foo + 代入
変数 まとめ 変数とは ⚫ プログラム上で、処理に使う数値などのデータ(値)に 名前をつけて保持するためのもの。 ⚫ Pythonにおいて、変数のみの宣言は必要ない。 ⚫ 変数に値を入れる事を、値を代入するという。
構文 11 変数の作成 変数名 = 値 値の代入 変数名 = 値
配列について Array, List
配列とは(再掲) 配列とは、複数の変数を一つに纏めたものである。 Pythonでは配列に相当するリストが使用可能 13 リストと配列は仕組みが違うが 使用感はだいたい同じ
リスト 配列と同様に、変数名と添え字を使って管理する。 宣言の方法は以下の通り。 14 リスト名 = [値1, 値2, 値3] list
= [2, 17, 3] 構文 list[0] list[1] list[2]
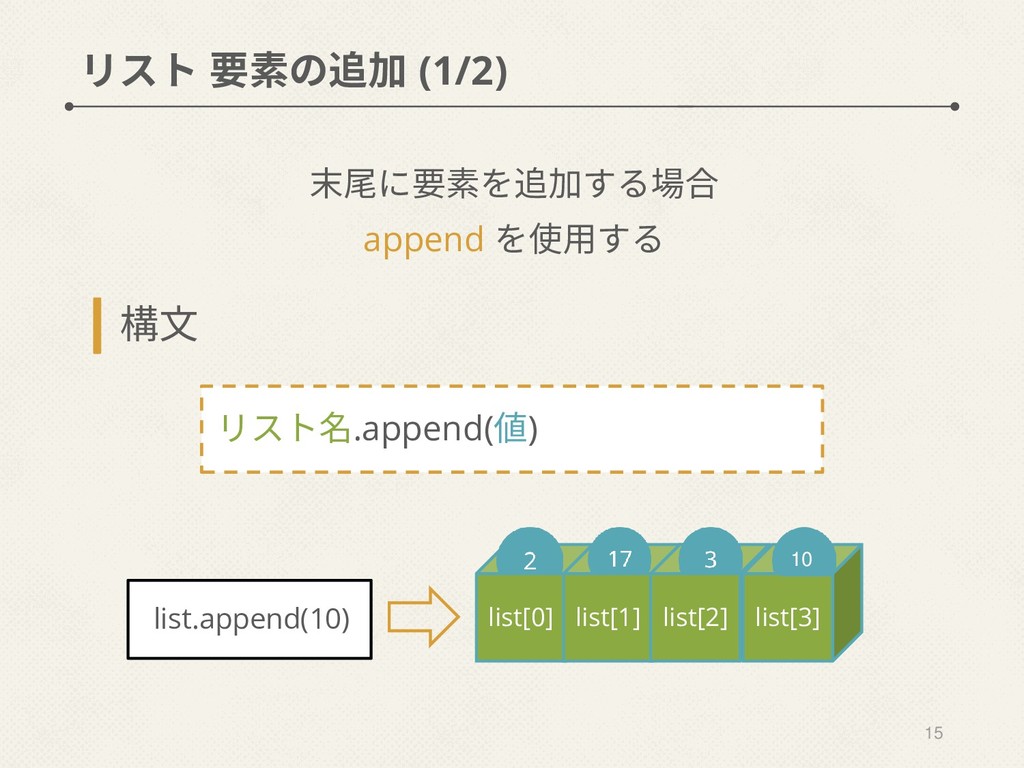
リスト 要素の追加 (1/2) 末尾に要素を追加する場合 append を使用する 15 リスト名.append(値) list.append(10) 構文
list[0] list[1] list[2] list[3] 10
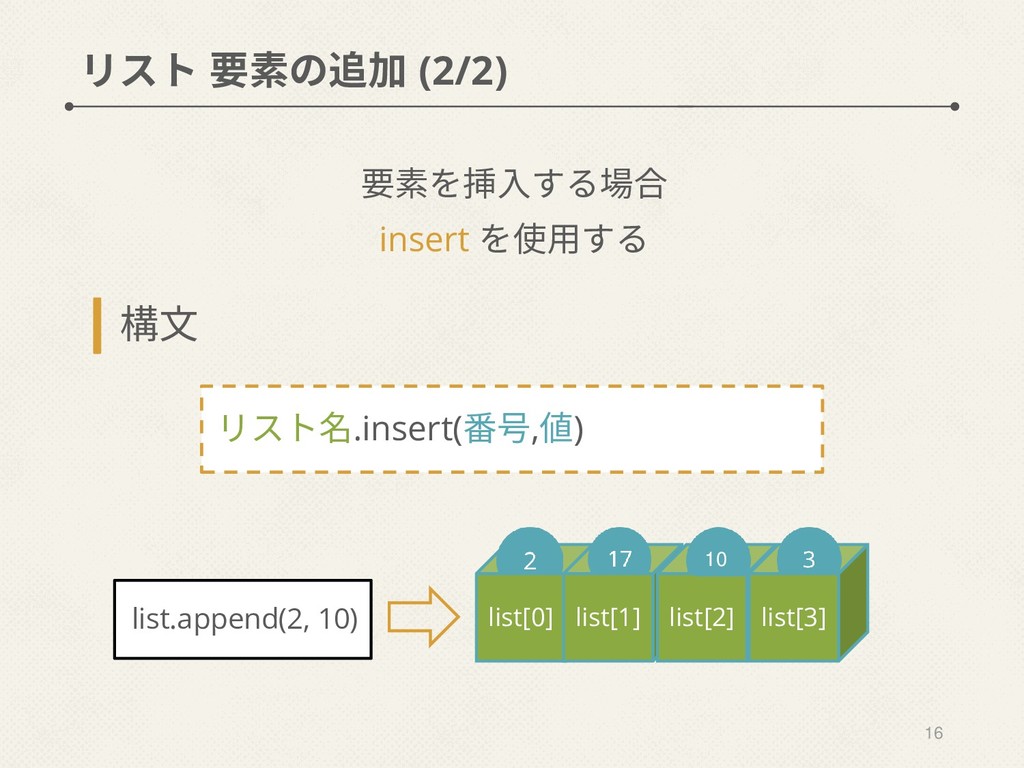
リスト 要素の追加 (2/2) 要素を挿入する場合 insert を使用する 16 リスト名.insert(番号,値) list.append(2, 10)
構文 list[0] list[1] list[2] 10 list[3]
リスト 要素の削除 要素を削除する場合 del を使用する 17 del リスト名[番号] del list[2]
構文 list[0] list[1] list[2]
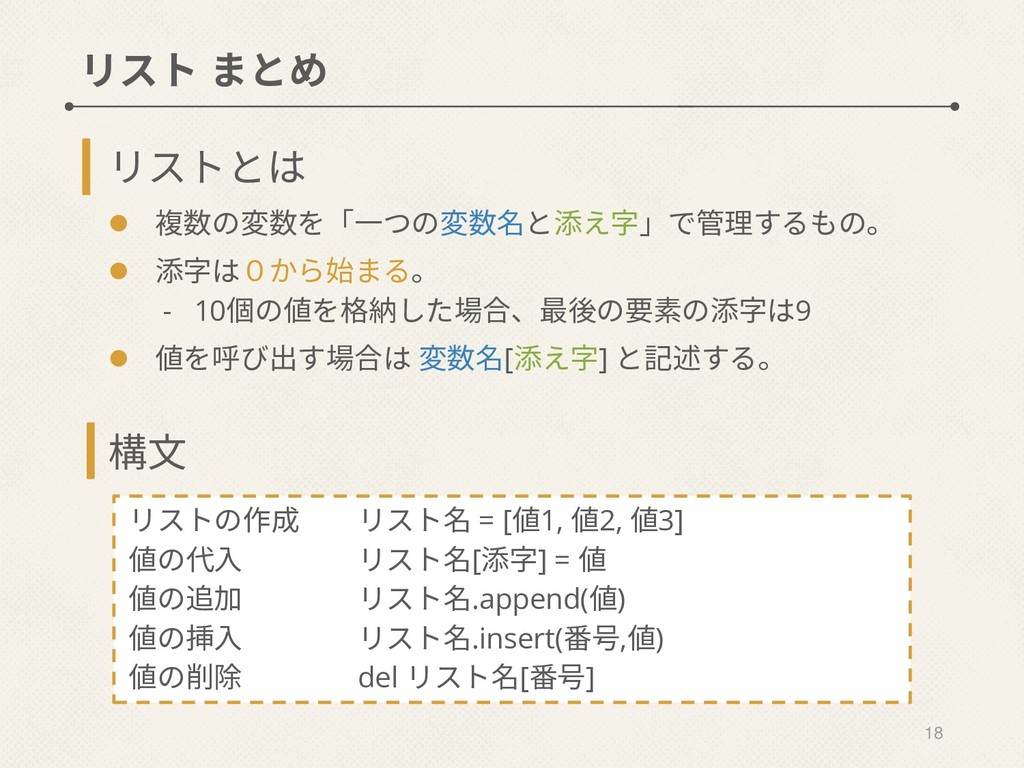
リスト まとめ リストとは ⚫ 複数の変数を「一つの変数名と添え字」で管理するもの。 ⚫ 添字は0から始まる。 - 10個の値を格納した場合、最後の要素の添字は9 ⚫
値を呼び出す場合は 変数名[添え字] と記述する。 構文 18 リストの作成 リスト名 = [値1, 値2, 値3] 値の代入 リスト名[添字] = 値 値の追加 リスト名.append(値) 値の挿入 リスト名.insert(番号,値) 値の削除 del リスト名[番号]
関数について function
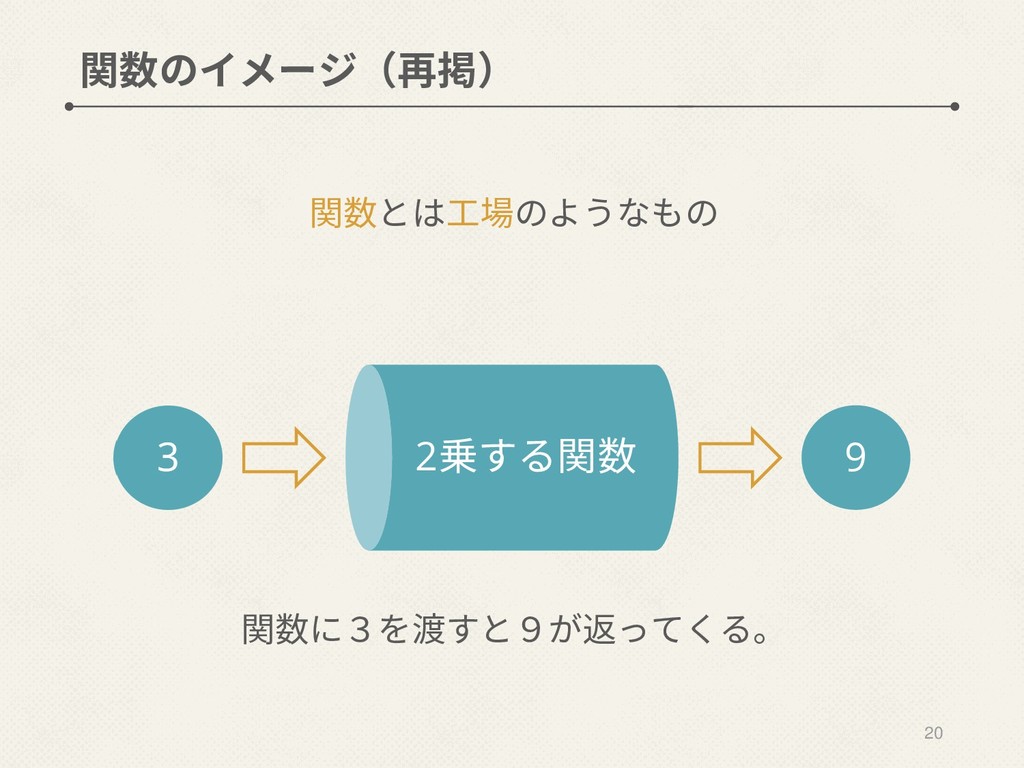
関数のイメージ(再掲) 関数とは工場のようなもの 20 2乗する関数 9 関数に3を渡すと9が返ってくる。
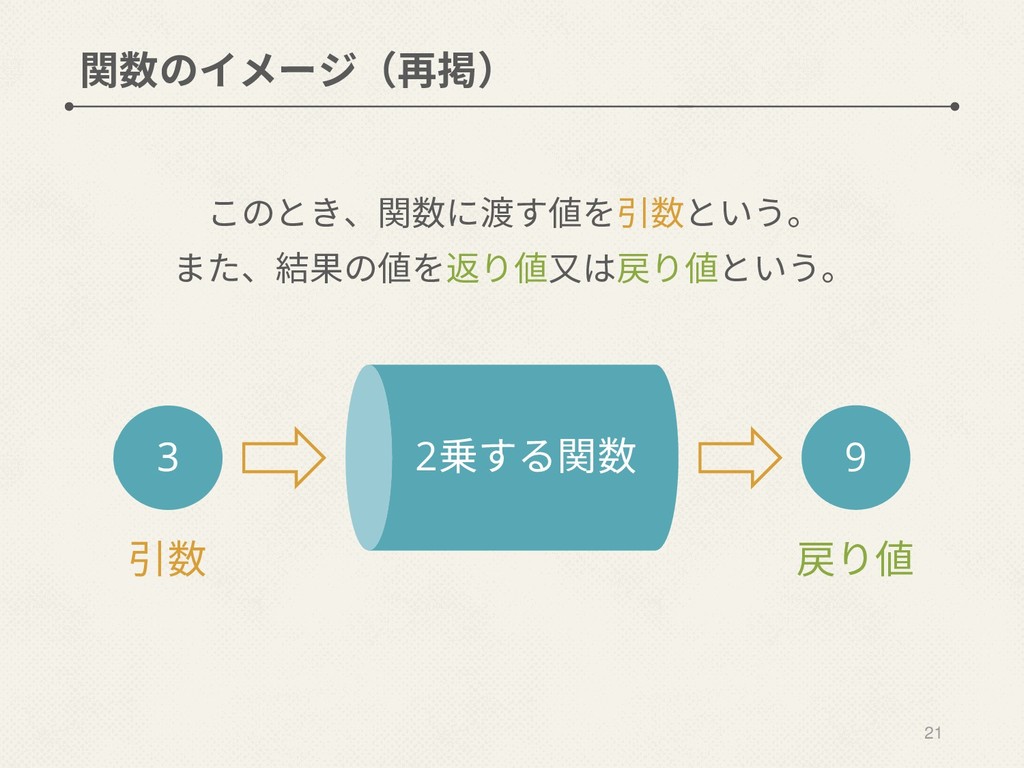
関数のイメージ(再掲) このとき、関数に渡す値を引数という。 また、結果の値を返り値又は戻り値という。 21 2乗する関数 9 引数 戻り値
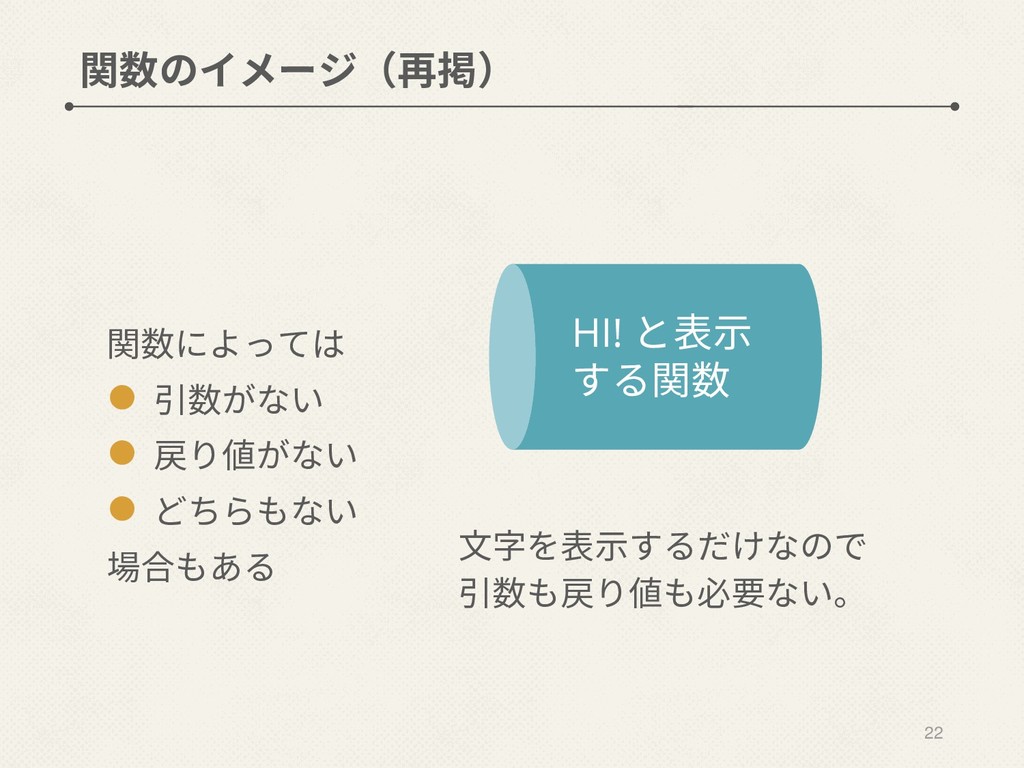
関数のイメージ(再掲) 関数によっては ⚫ 引数がない ⚫ 戻り値がない ⚫ どちらもない 場合もある 22
HI! と表示 する関数 文字を表示するだけなので 引数も戻り値も必要ない。
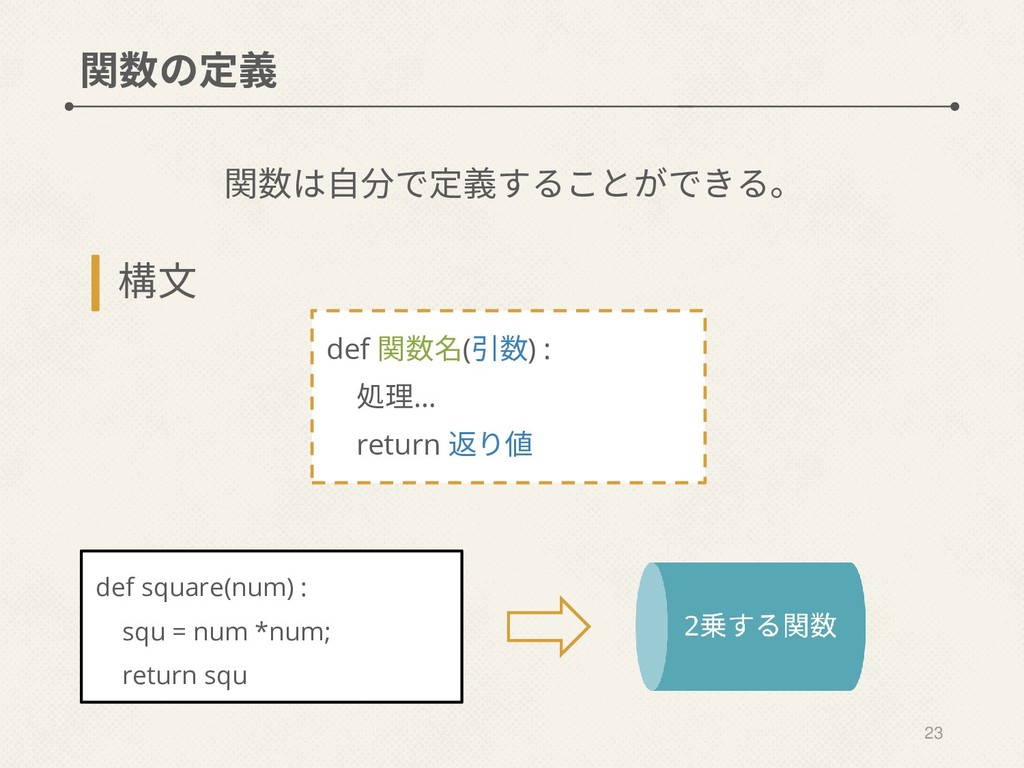
関数の定義 関数は自分で定義することができる。 23 def 関数名(引数) : 処理… return 返り値 def
square(num) : squ = num *num; return squ 構文
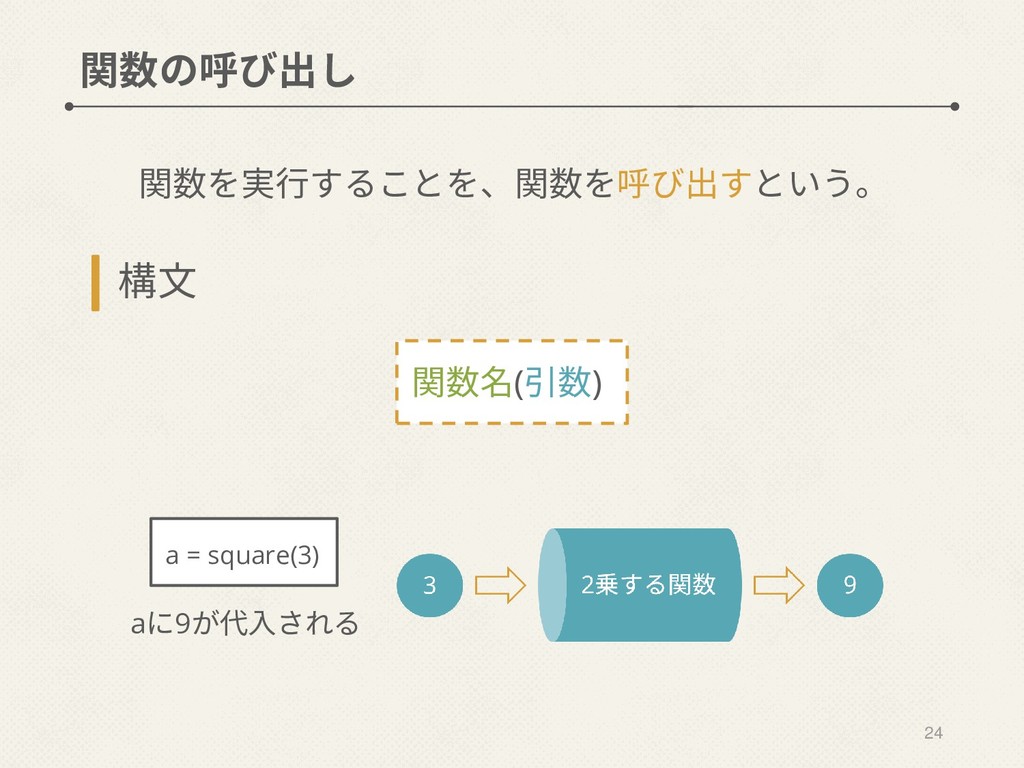
関数の呼び出し 関数を実行することを、関数を呼び出すという。 24 関数名(引数) a = square(3) 構文 aに9が代入される
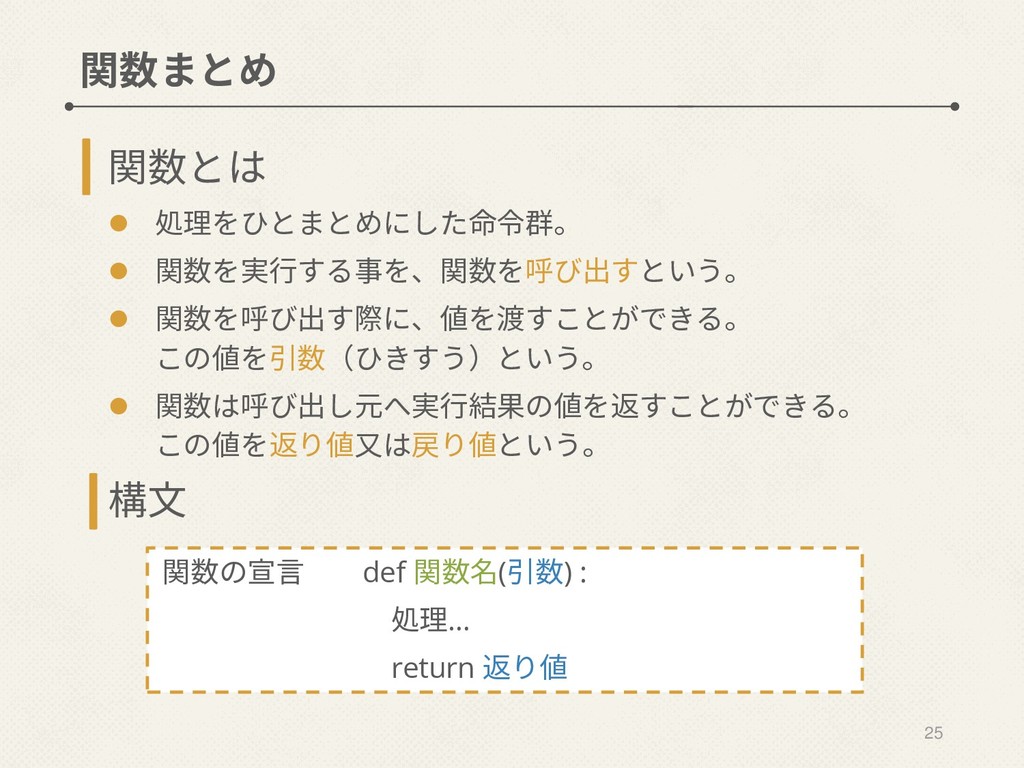
関数まとめ 関数とは ⚫ 処理をひとまとめにした命令群。 ⚫ 関数を実行する事を、関数を呼び出すという。 ⚫ 関数を呼び出す際に、値を渡すことができる。 この値を引数(ひきすう)という。 ⚫
関数は呼び出し元へ実行結果の値を返すことができる。 この値を返り値又は戻り値という。 構文 25 関数の宣言 def 関数名(引数) : 処理… return 返り値
分岐
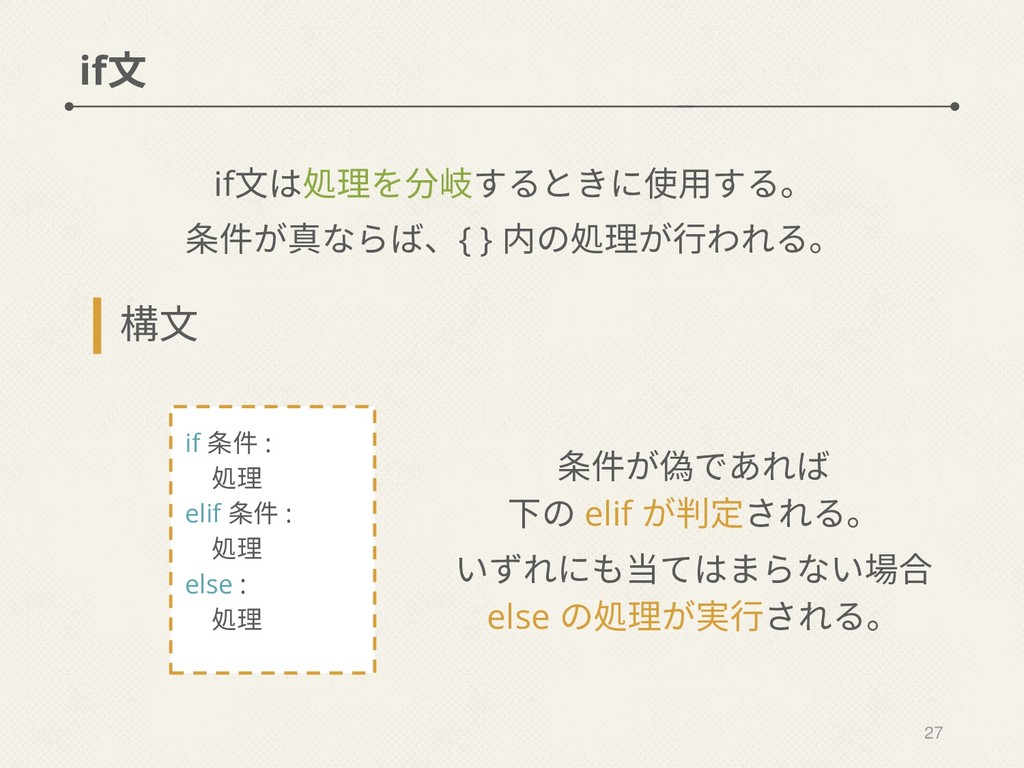
if文 if文は処理を分岐するときに使用する。 条件が真ならば、{ } 内の処理が行われる。 27 if 条件 : 処理
elif 条件 : 処理 else : 処理 構文 条件が偽であれば 下の elif が判定される。 いずれにも当てはまらない場合 else の処理が実行される。
繰り返し
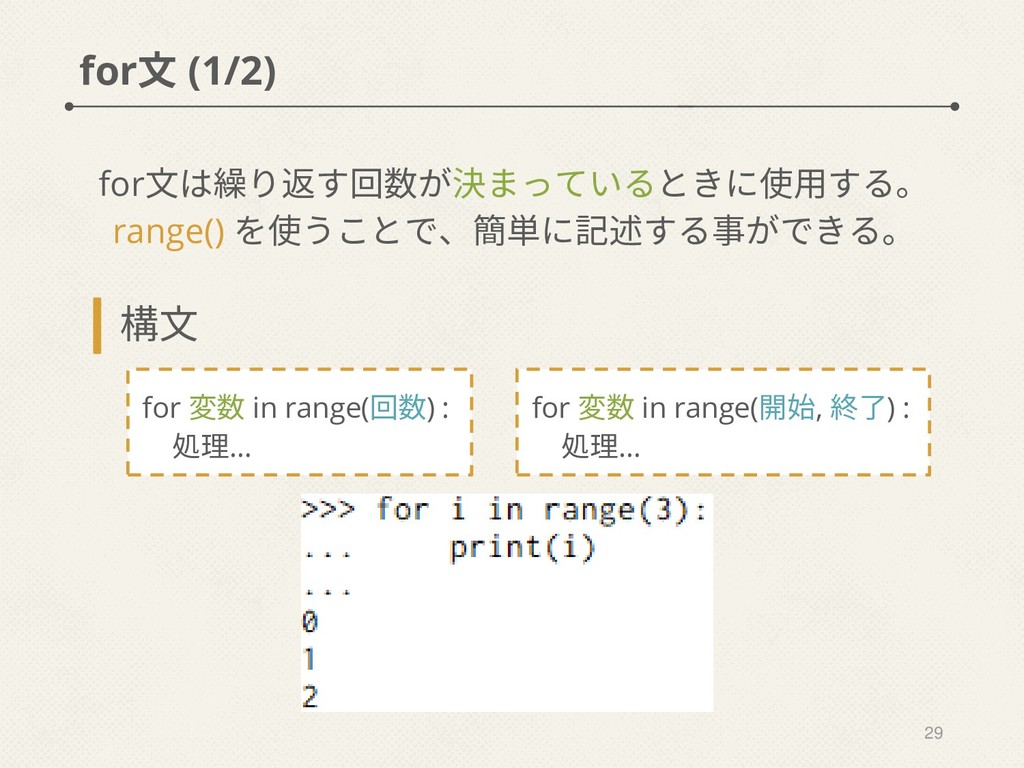
for文 (1/2) for文は繰り返す回数が決まっているときに使用する。 range() を使うことで、簡単に記述する事ができる。 29 for 変数 in range(回数)
: 処理… 構文 for 変数 in range(開始, 終了) : 処理…
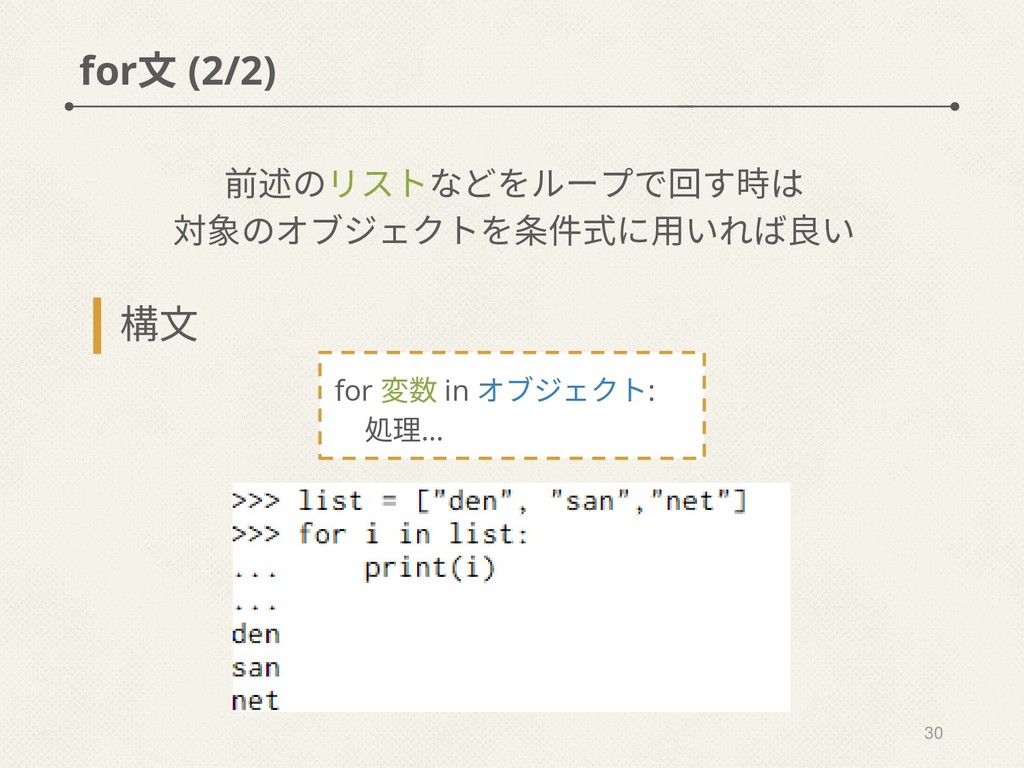
for文 (2/2) 前述のリストなどをループで回す時は 対象のオブジェクトを条件式に用いれば良い 30 for 変数 in オブジェクト: 処理…
構文
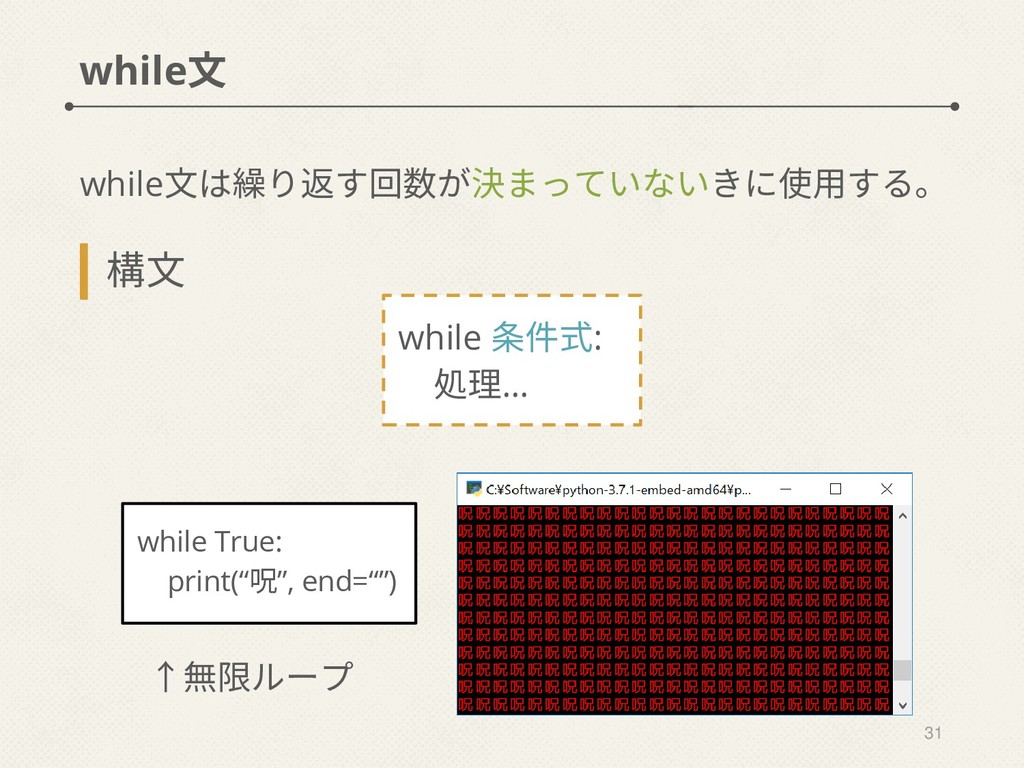
while文 while文は繰り返す回数が決まっていないきに使用する。 31 while 条件式: 処理… 構文 while True: print(“呪”,
end=“”) ↑無限ループ
演習 10-1
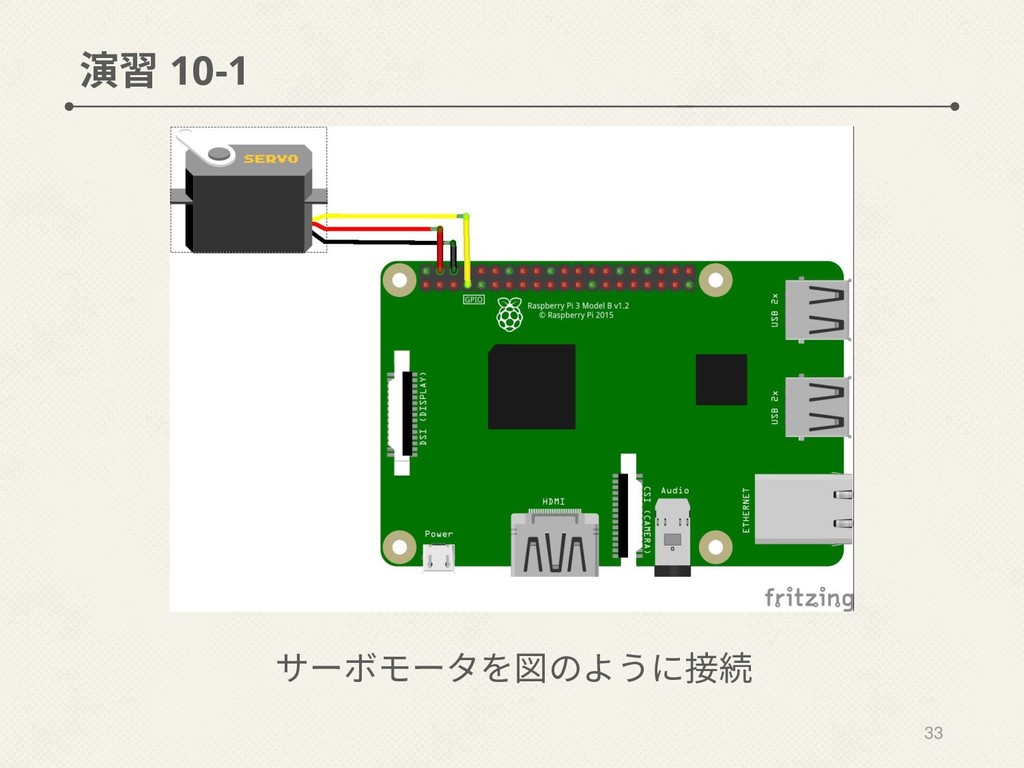
演習 10-1 サーボモータを図のように接続 33
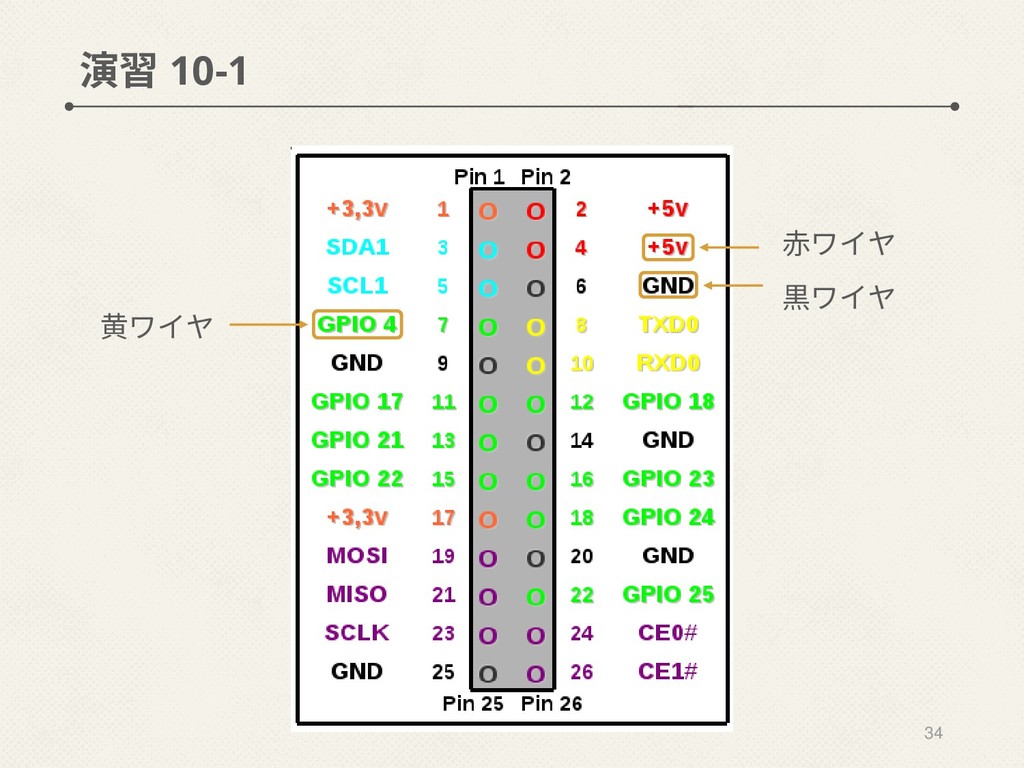
演習 10-1 赤ワイヤ 34 黒ワイヤ 黄ワイヤ
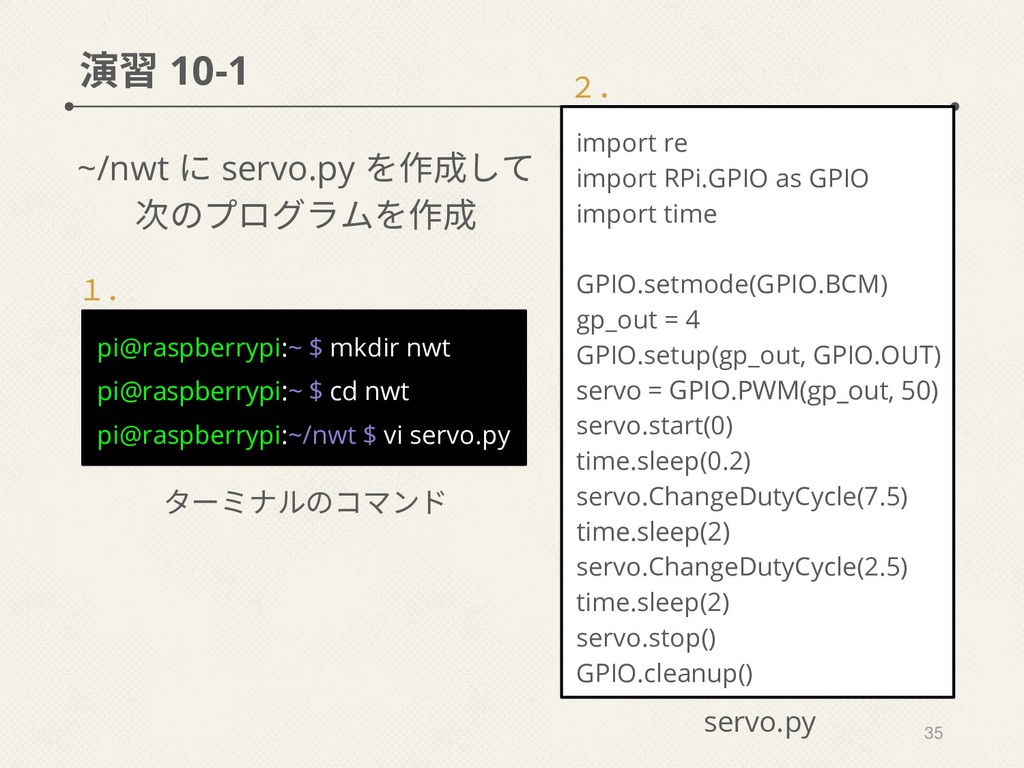
演習 10-1 ~/nwt に servo.py を作成して 次のプログラムを作成 35 import re
import RPi.GPIO as GPIO import time GPIO.setmode(GPIO.BCM) gp_out = 4 GPIO.setup(gp_out, GPIO.OUT) servo = GPIO.PWM(gp_out, 50) servo.start(0) time.sleep(0.2) servo.ChangeDutyCycle(7.5) time.sleep(2) servo.ChangeDutyCycle(2.5) time.sleep(2) servo.stop() GPIO.cleanup() pi@raspberrypi:~ $ mkdir nwt pi@raspberrypi:~ $ cd nwt pi@raspberrypi:~/nwt $ vi servo.py ターミナルのコマンド servo.py 1. 2.
演習 10-1 36 pi@raspberrypi:~/nwt $ sudo python servo.py ターミナルのコマンド 3.:wq
で保存 4.servo.py を実行!
本日の講座はここまで お疲れ様でした
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![リスト 配列と同様に、変数名と添え字を使って管理する。 宣言の方法は以下の通り。 14 リスト名 = [値1, 値2, 値3] list](https://files.speakerdeck.com/presentations/fc67a366c55748199d4a6586f95f483c/slide_13.jpg){kind=link}
{kind=link}
{kind=link}
![リスト 要素の削除 要素を削除する場合 del を使用する 17 del リスト名[番号] del list[2]](https://files.speakerdeck.com/presentations/fc67a366c55748199d4a6586f95f483c/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}