Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
obniz 4足歩行ロボット Control by Google Home
Search
Google Homer
November 12, 2018
Technology
1.1k
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
obniz 4足歩行ロボット Control by Google Home
Google Homer
November 12, 2018
More Decks by Google Homer
See All by Google Homer
意外とお手軽Donkey AI Car(ありがとうIoTLT)
googlehomer
0
760
ゆるふわマシンラーニング×ゆるメカトロでDonkey AI Car
googlehomer
0
330
私Servoですけど、ぐるぐる回りますが 何か ?!
googlehomer
0
420
The latest information on obniz for all of IoTLT’s
googlehomer
1
340
IoTLT vol.58@SoftBank IoTLT木曜サスペンス劇場
googlehomer
0
810
micro:bitはobnizの夢をみるか?
googlehomer
1
870
Invitation for RPA next stage @UiPathFriendsライトニングトークナイト2019
googlehomer
0
120
M5StickC Block Programming UiFLOW @ ビジュアルプログラミング交流会
googlehomer
1
740
Smart Speaker & IoT @東北TECH道場 八戸道場
googlehomer
0
150
Other Decks in Technology
See All in Technology
AI Agent SaaS を支える自社仮想化基盤への挑戦と実運用 / ai-agent-saas-virtualization
flatt_security
2
3.8k
Claude Code 珍プレー好プレー
shinyasaita
0
330
CIで使うClaude
iwatatomoya
0
250
[2026-07-15] AI Ready なはずだったアーキテクチャと、見えてきた課題・次に目指す状態
wxyzzz
4
2.8k
地域 SRE コミュニティ最前線 / SRE NEXT 2026 Discussion Night Track C
muziyoshiz
0
210
ポストモーテム! DDoSからサイトは守れた。 でもビジネスは守れなかった。
bengo4com
0
2.8k
関数型の考えを TypeScript に持ち込んで、テストしやすい純粋関数を増やす / Pure at the Core, Effects at the Edge: Bringing Functional Thinking into TypeScript
kaminashi
1
110
“それは自分の仕事じゃない"を 越えて行け
yuukiyo
0
100
インフラ寄りSREでも 開発に踏み出せる〜境界を越えてユーザー体験に向き合いたい〜
sansantech
PRO
2
3.7k
AI Driven AI Governance
pict3
0
340
Making sense of Google’s agentic dev tools
glaforge
1
190
「最後に責任を取るのはチーム」— 人間のPRレビューを最小化してアップデートしたメンタルモデル
jnishime_dresscode
0
600
Featured
See All Featured
B2B Lead Gen: Tactics, Traps & Triumph
marketingsoph
0
170
Bioeconomy Workshop: Dr. Julius Ecuru, Opportunities for a Bioeconomy in West Africa
akademiya2063
PRO
1
170
Ten Tips & Tricks for a 🌱 transition
stuffmc
0
150
Building Flexible Design Systems
yeseniaperezcruz
330
40k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2k
Balancing Empowerment & Direction
lara
6
1.2k
Future Trends and Review - Lecture 12 - Web Technologies (1019888BNR)
signer
PRO
0
3.6k
Let's Do A Bunch of Simple Stuff to Make Websites Faster
chriscoyier
508
140k
Learning to Love Humans: Emotional Interface Design
aarron
275
41k
Lightning Talk: Beautiful Slides for Beginners
inesmontani
PRO
2
600
Statistics for Hackers
jakevdp
799
230k
Tips & Tricks on How to Get Your First Job In Tech
honzajavorek
1
560
Transcript
None
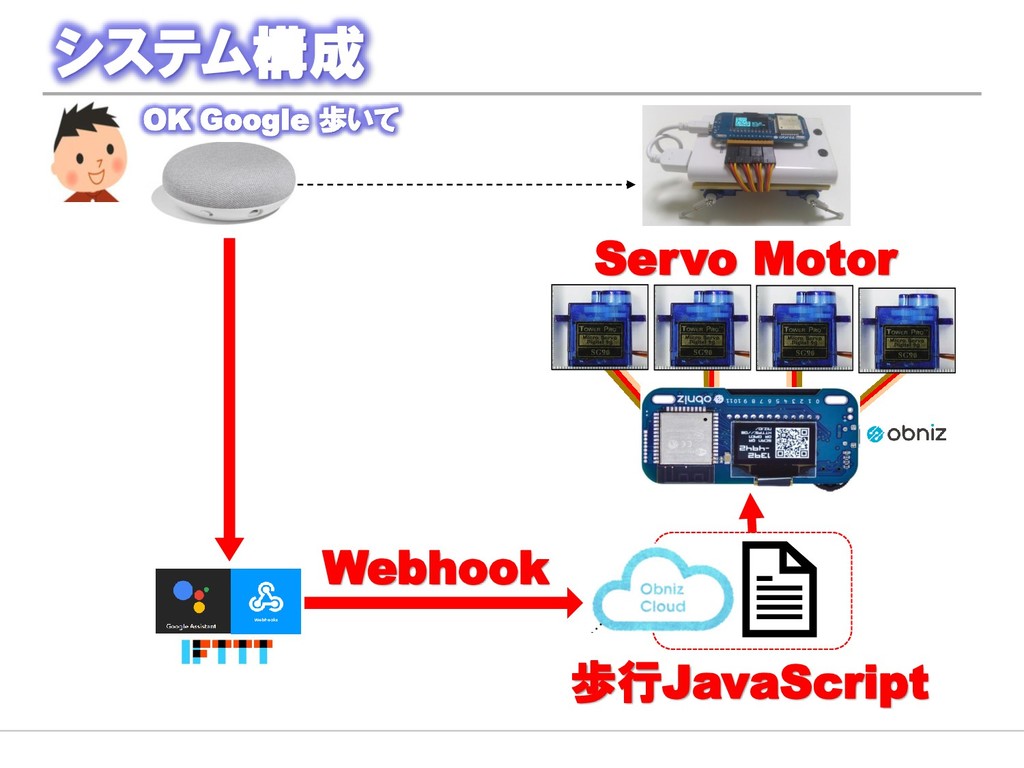
Servo Motor システム構成 歩行JavaScript OK Google 歩いて Webhook
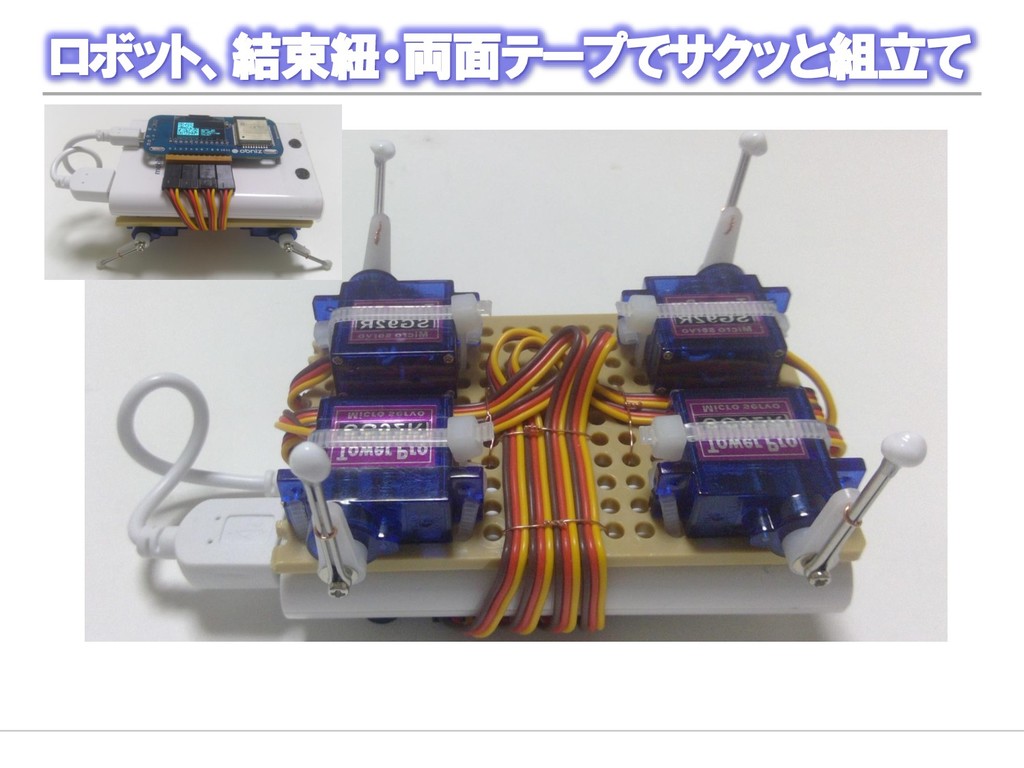
ロボット、結束紐・両面テープでサクッと組立て
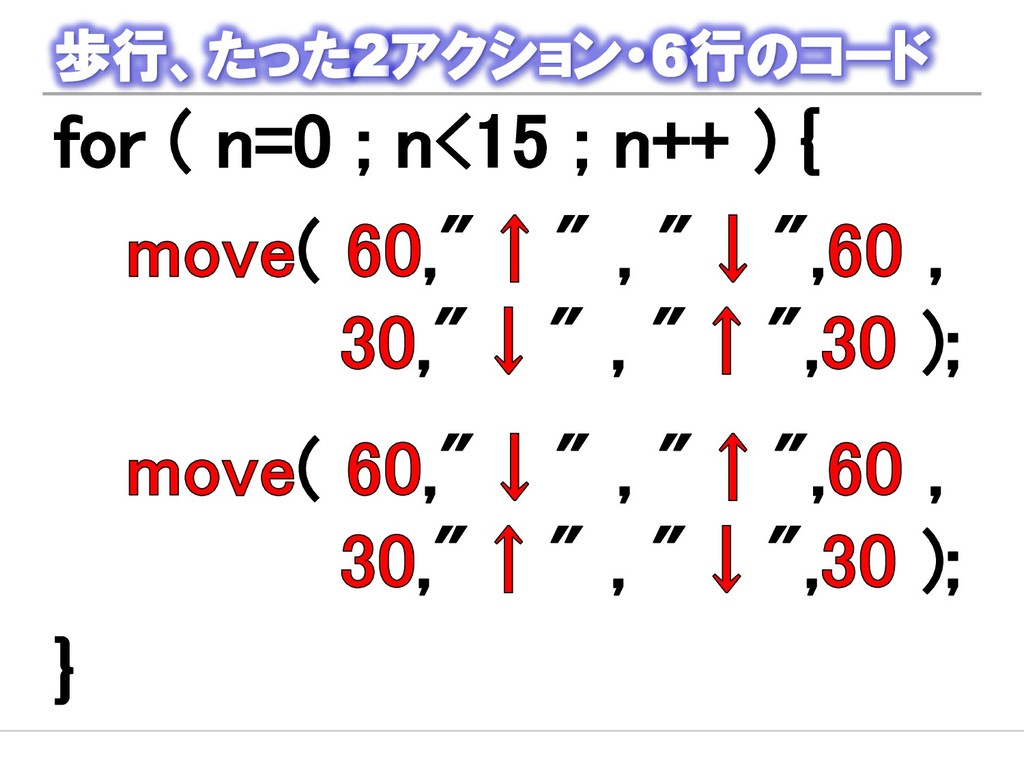
歩行、たった2アクション・6行のコード
Obniz 4足歩行ロボット Control by Google Home
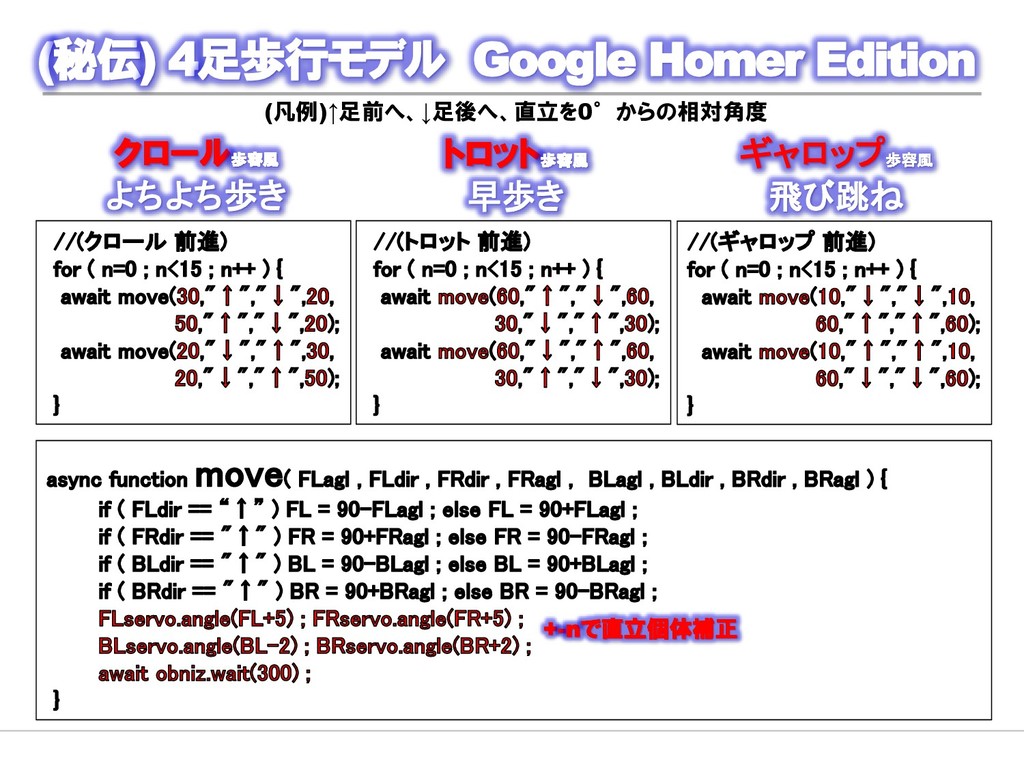
(秘伝) 4足歩行モデル Google Homer Edition トロット歩容風 早歩き クロール歩容風 よちよち歩き ギャロップ歩容風
飛び跳ね +-nで直立個体補正 (凡例)↑足前へ、↓足後へ、直立を0°からの相対角度
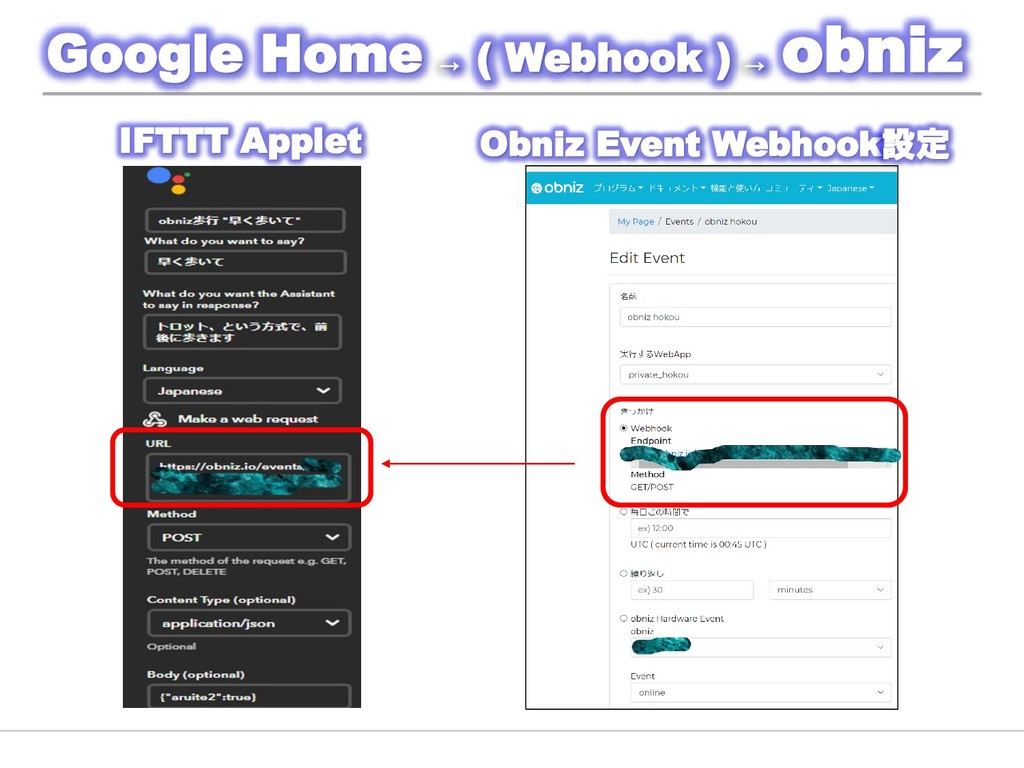
Obniz Event Webhook設定 IFTTT Applet Google Home → ( Webhook
) → obniz
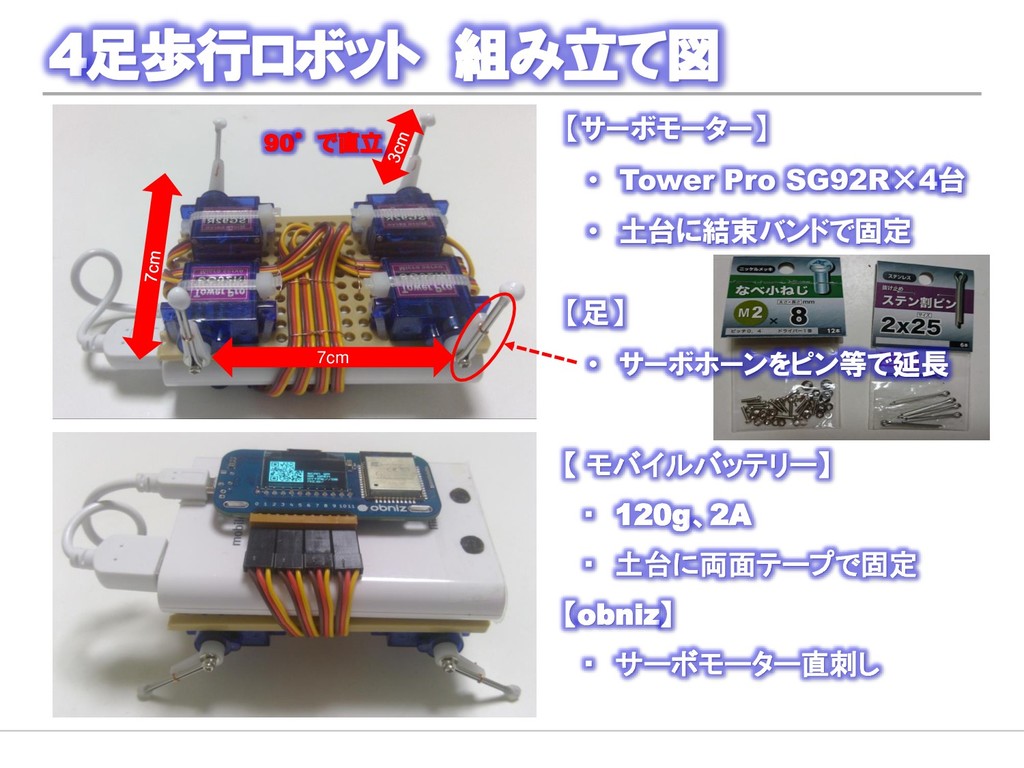
【サーボモーター】 ・ Tower Pro SG92R×4台 ・ 土台に結束バンドで固定 【足】 ・ サーボホーンをピン等で延長
【 モバイルバッテリー】 ・ 120g、2A ・ 土台に両面テープで固定 【obniz】 ・ サーボモーター直刺し 4足歩行ロボット 組み立て図 7cm 90°で直立
まとめ もはやケーブルの方が邪魔 恐るべきポテンシャル !!! obnizer うんこカウンター・エヴァンジェリスト Google Homer
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}