講義に入る前に 確認事項
前回までの復習
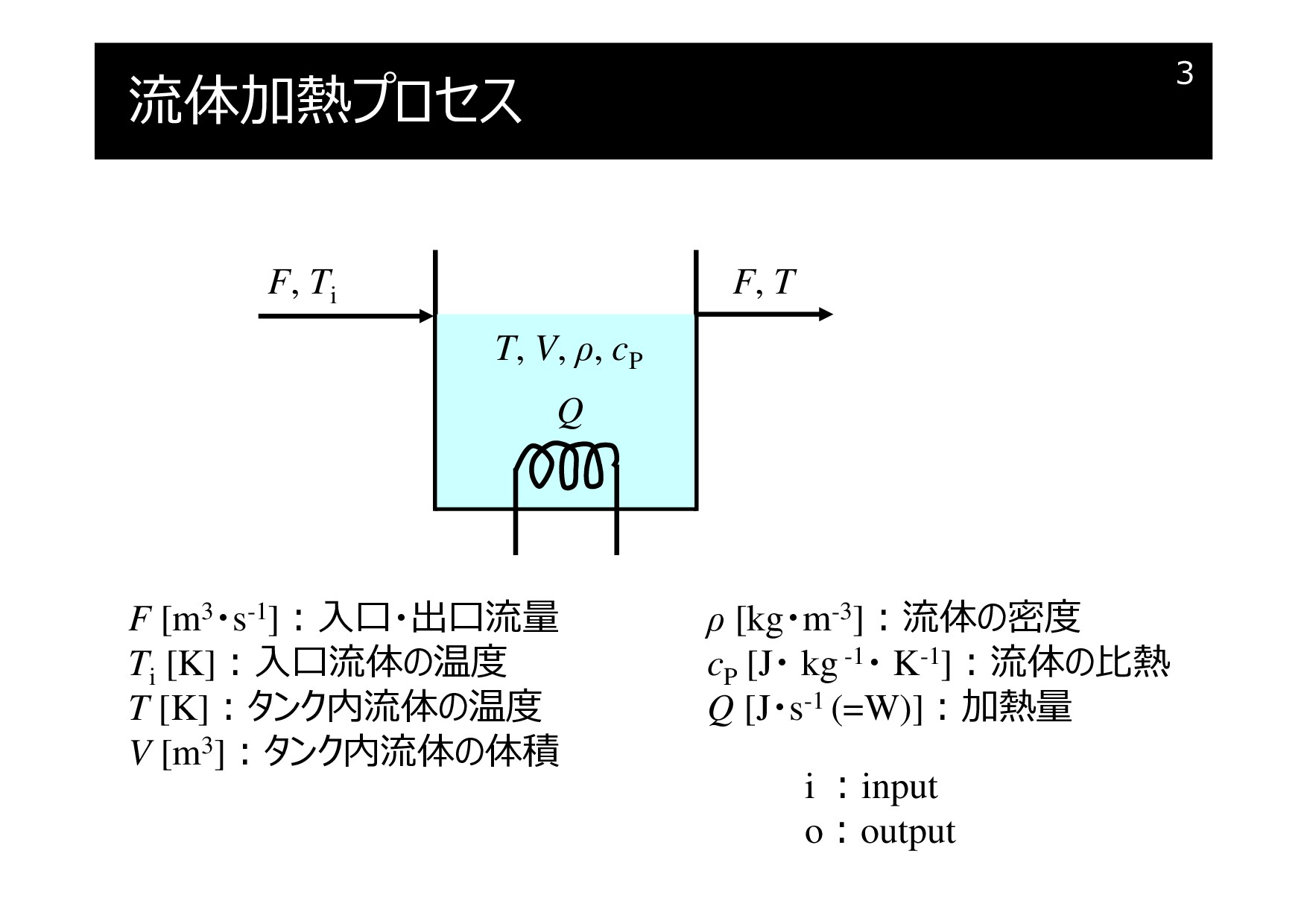
流体加熱プロセス
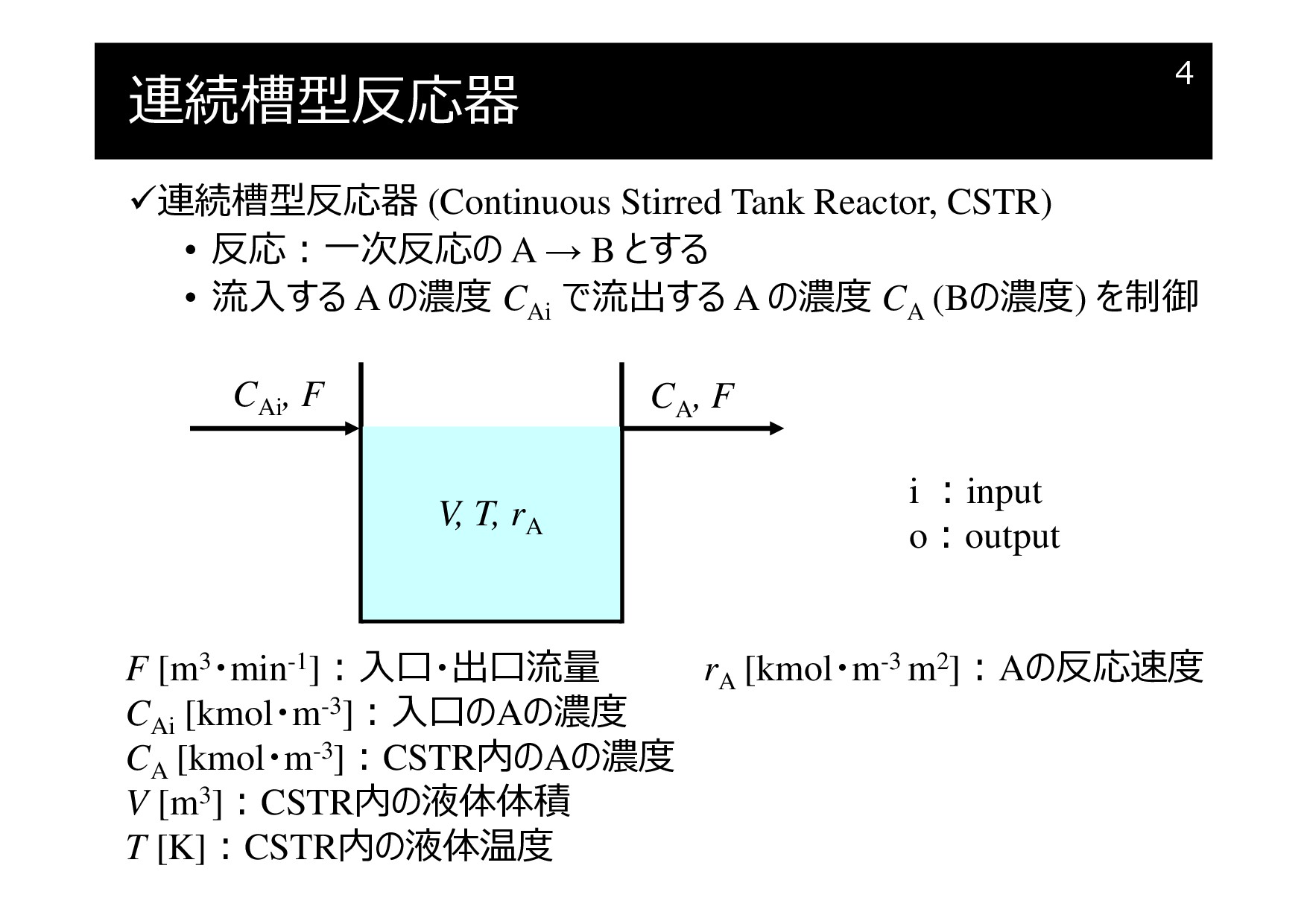
連続槽型反応器
タンクの液面高さ(液レベル)制御
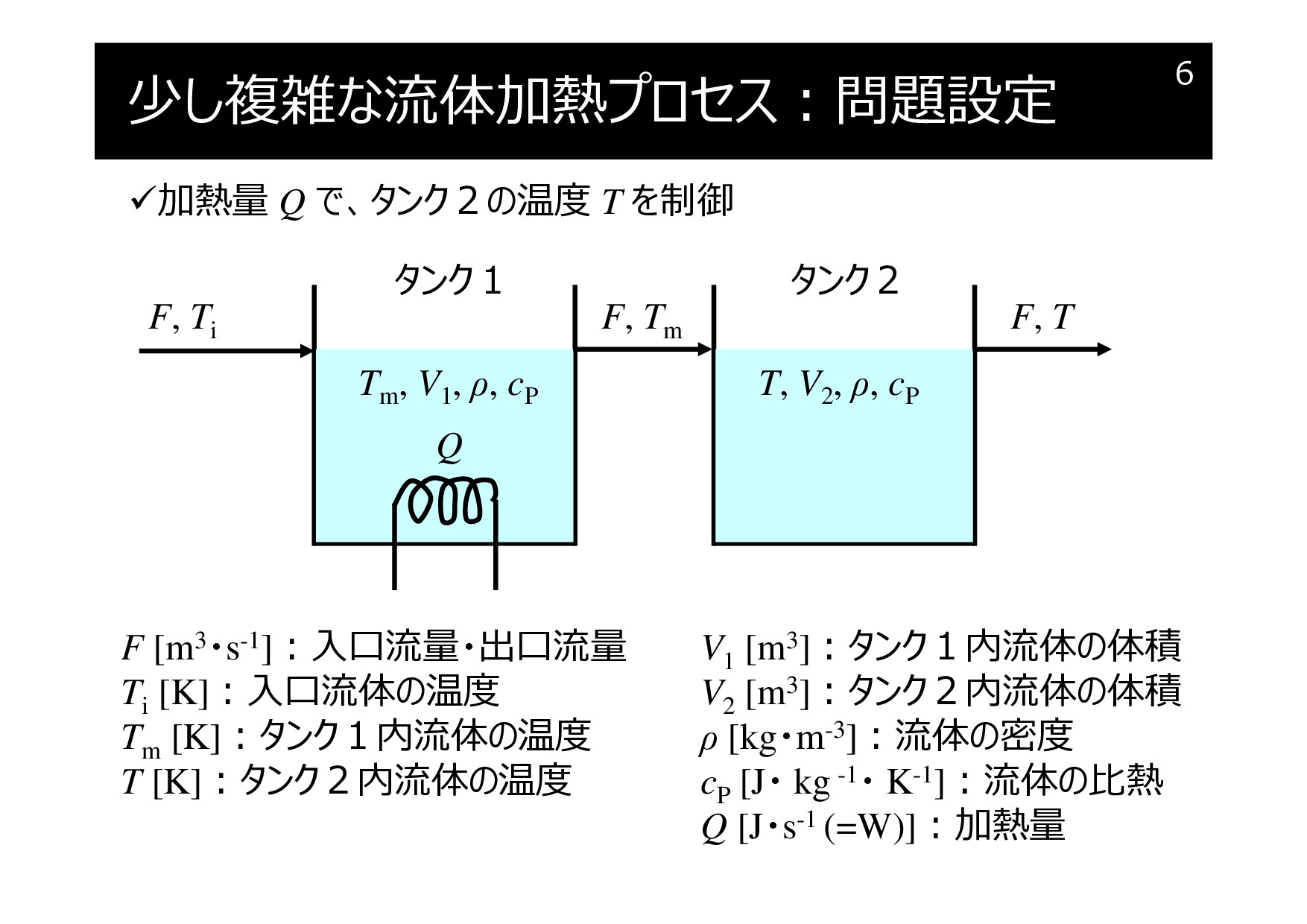
少し複雑な流体加熱プロセス:問題設定
設定値変更してみよう
外乱を加えてみよう
PID制御の問題点
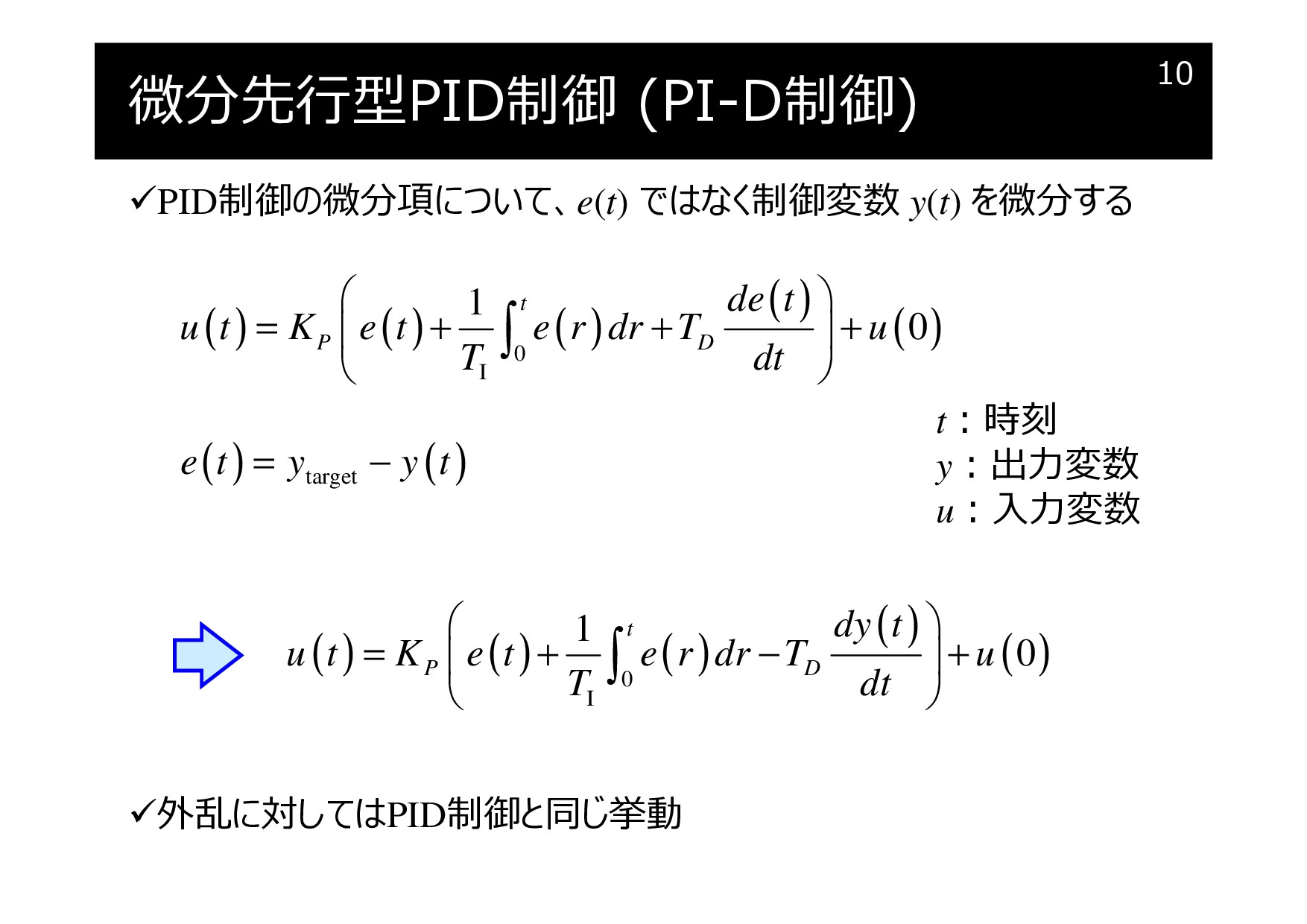
微分先行型PID制御 (PI-D制御)
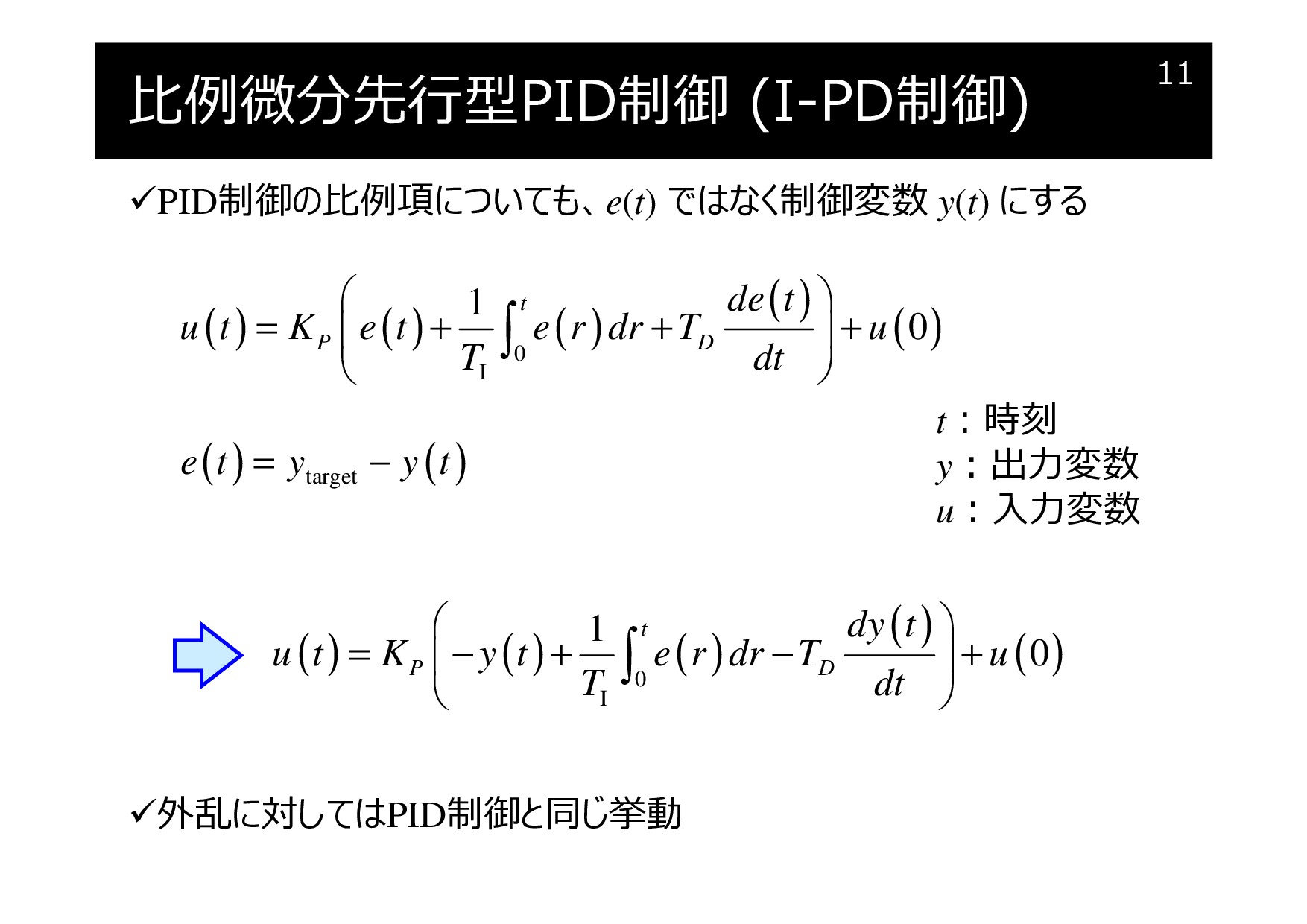
比例微分先行型PID制御 (I-PD制御)
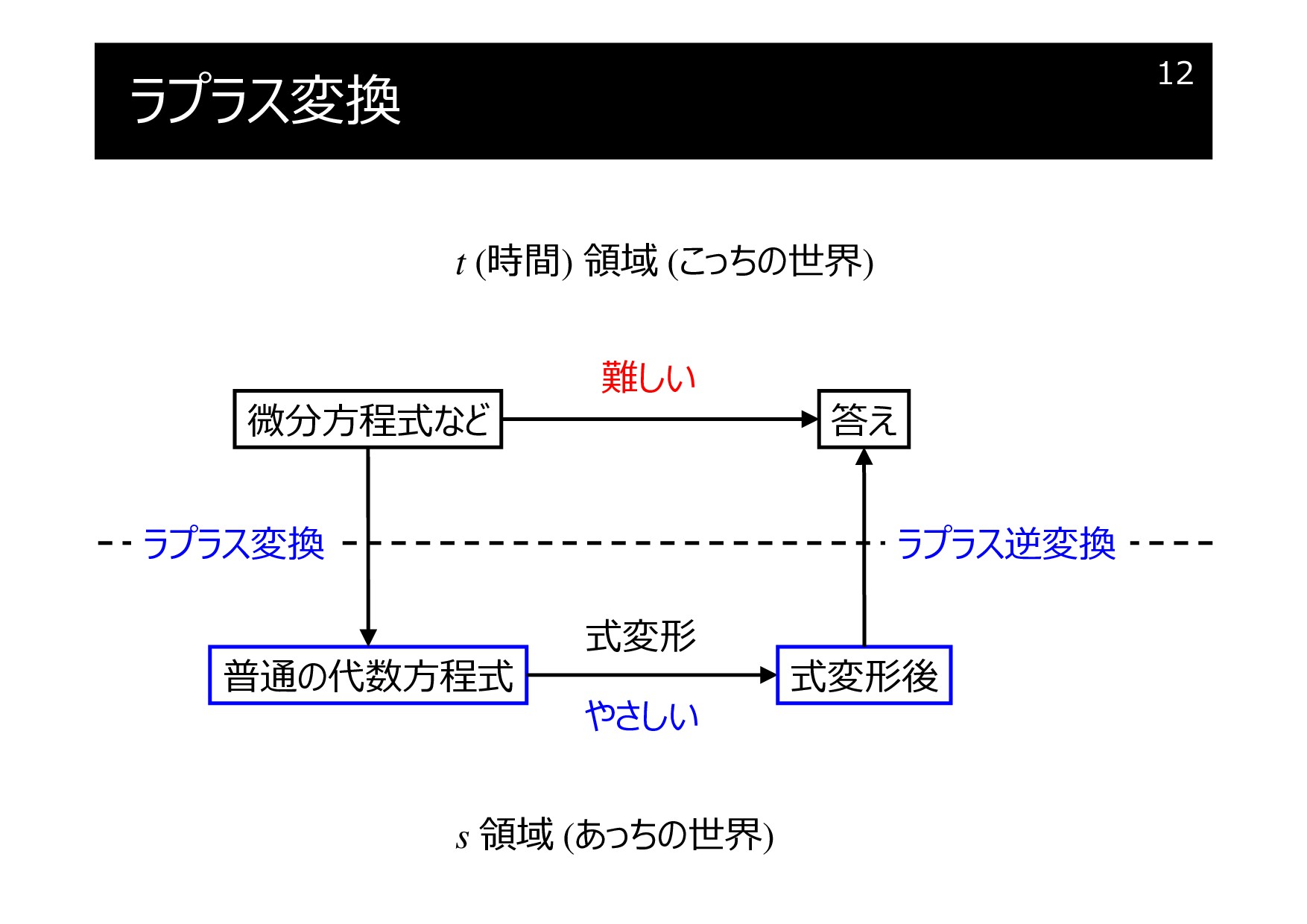
ラプラス変換
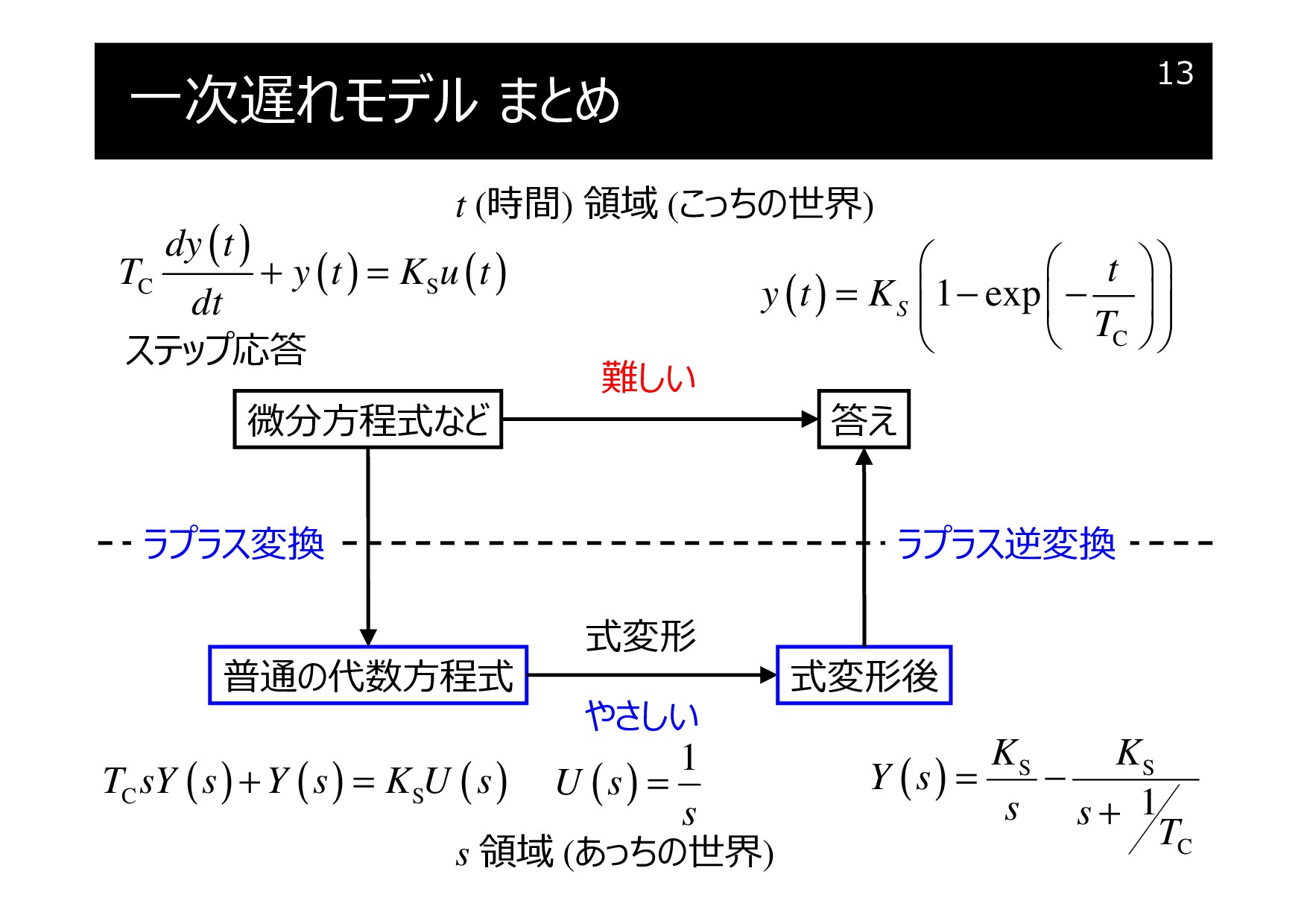
一次遅れモデル まとめ
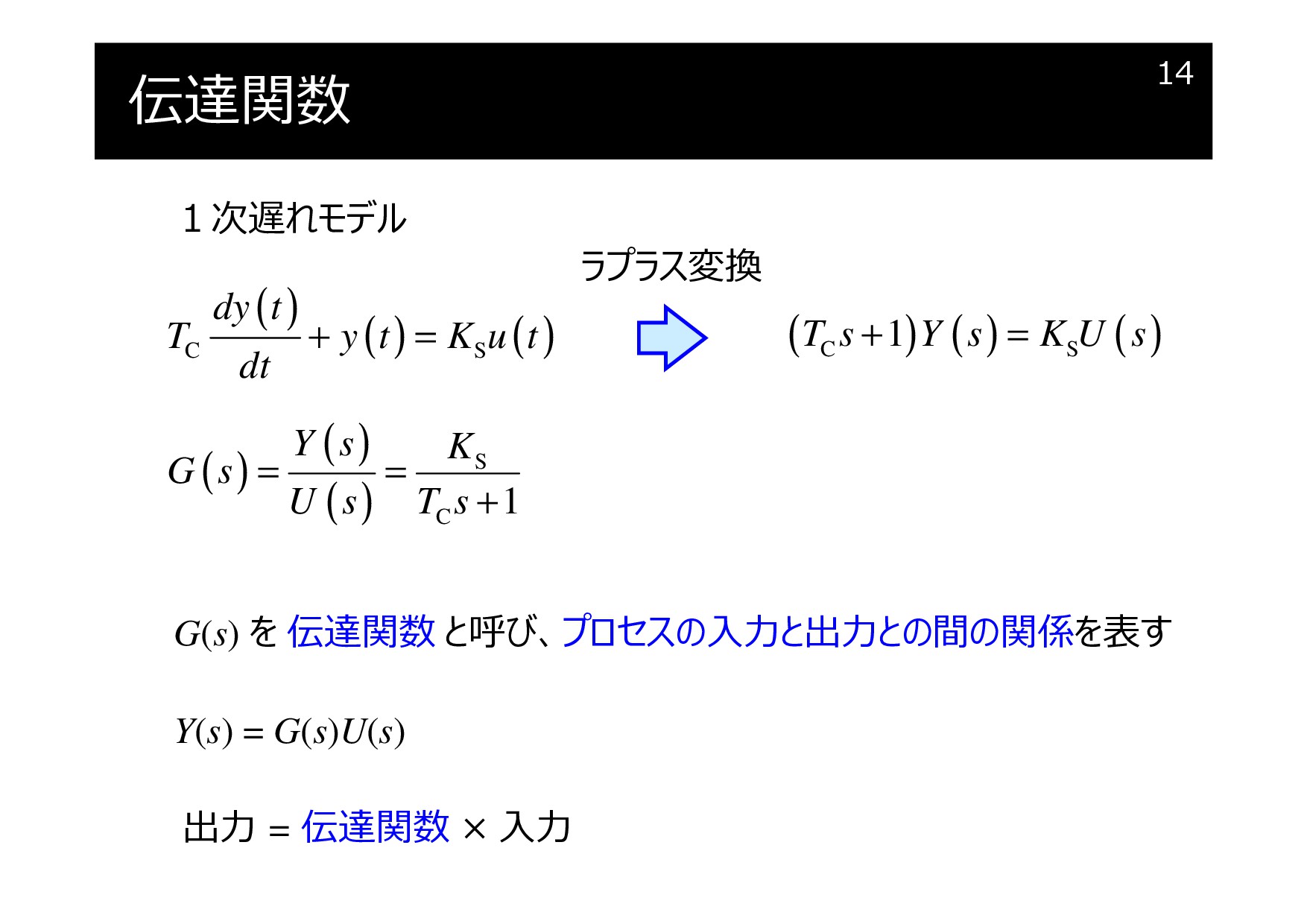
伝達関数
[練習] 1次遅れ+むだ時間 モデルの伝達関数は?
[練習] 2次遅れモデルの伝達関数は?
[練習] PID制御の伝達関数は?
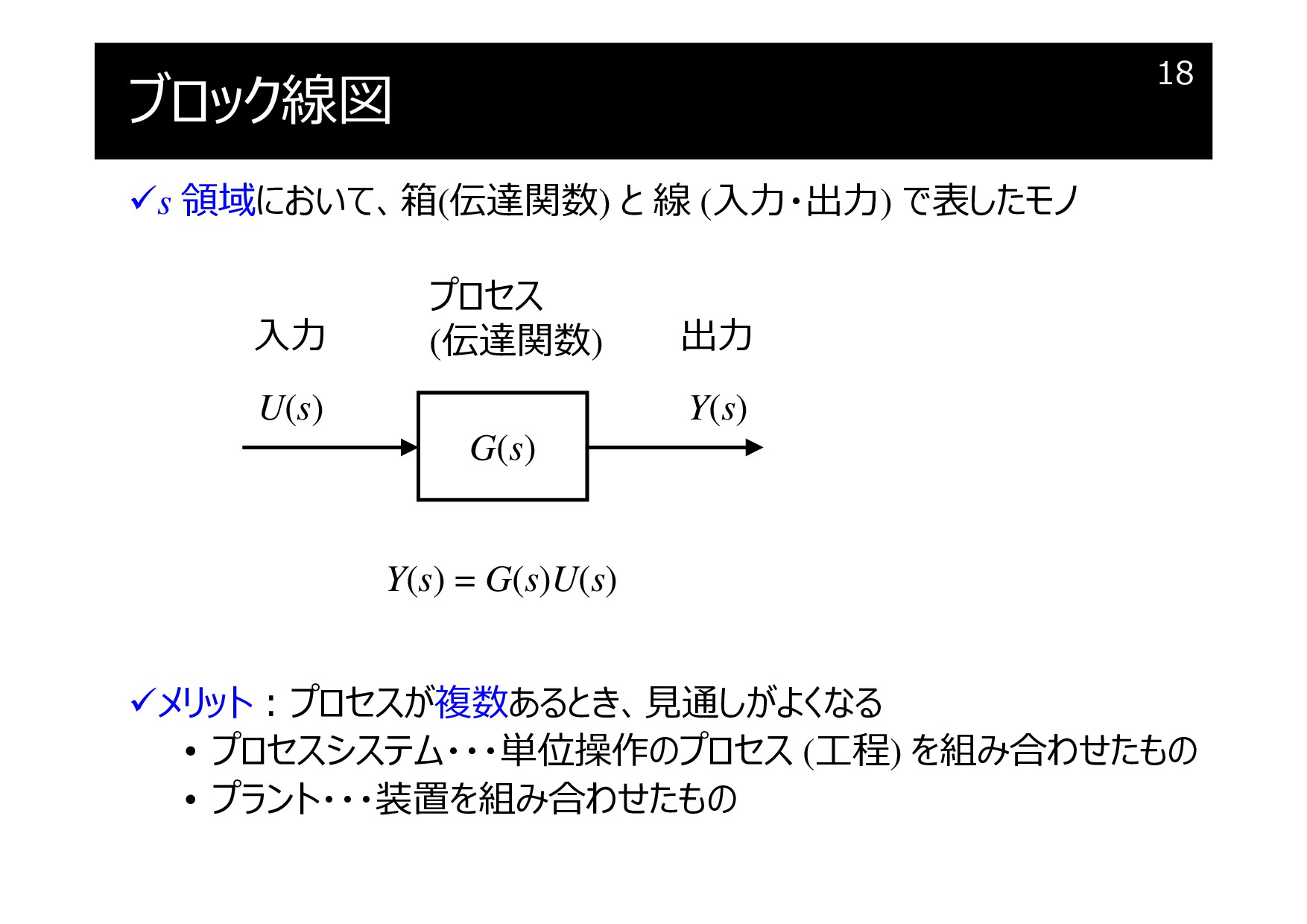
ブロック線図
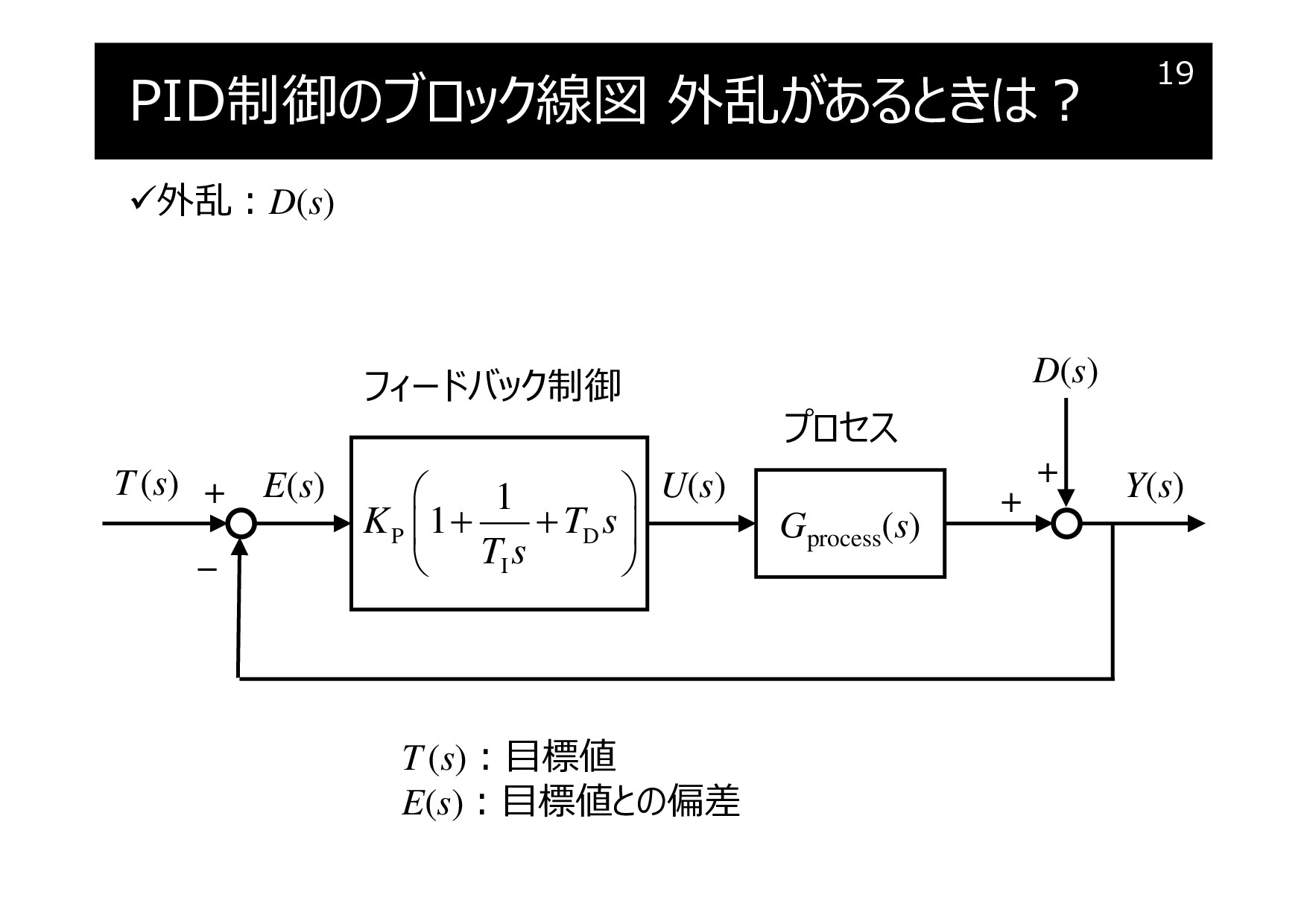
PID制御のブロック線図 外乱があるときは?
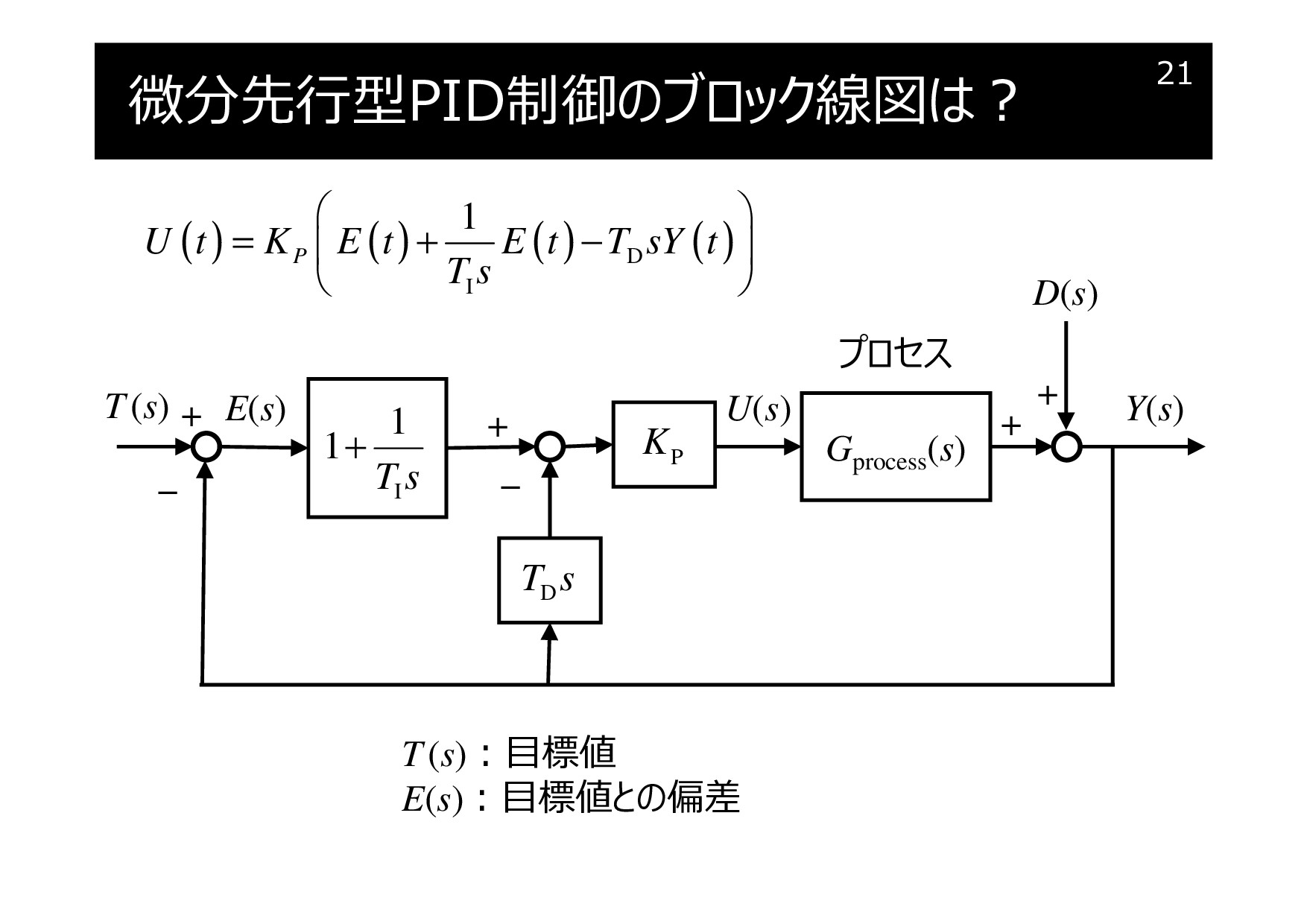
微分先行型PID制御のブロック線図は?
微分先行型PID制御のブロック線図は?
[練習] 少し複雑な流体加熱プロセス
[練習] 少し複雑な流体加熱プロセス
[練習] 伝達関数を求めよう!
[練習] 伝達関数
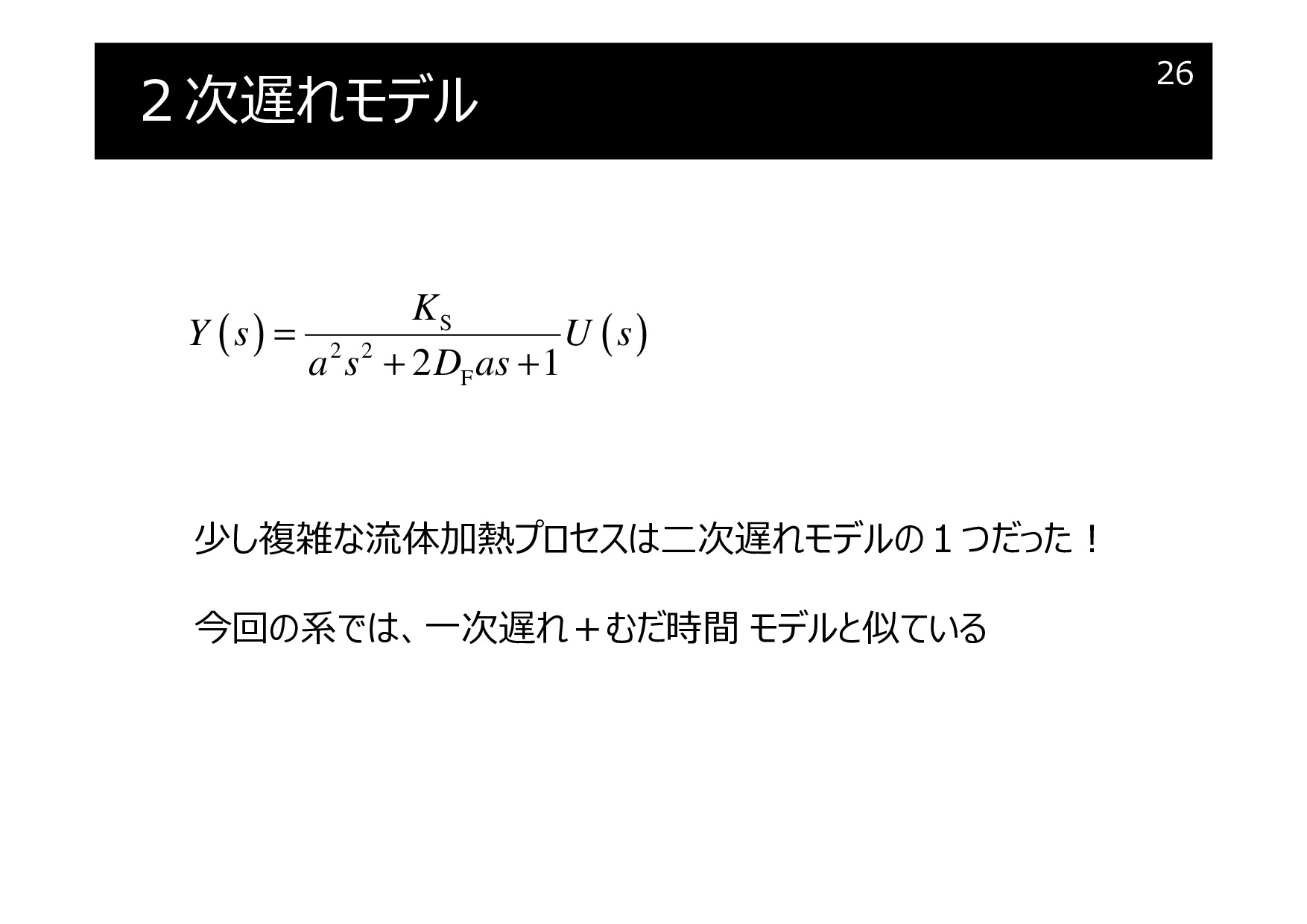
2次遅れモデル
2次遅れモデルのPID制御のパラメータ
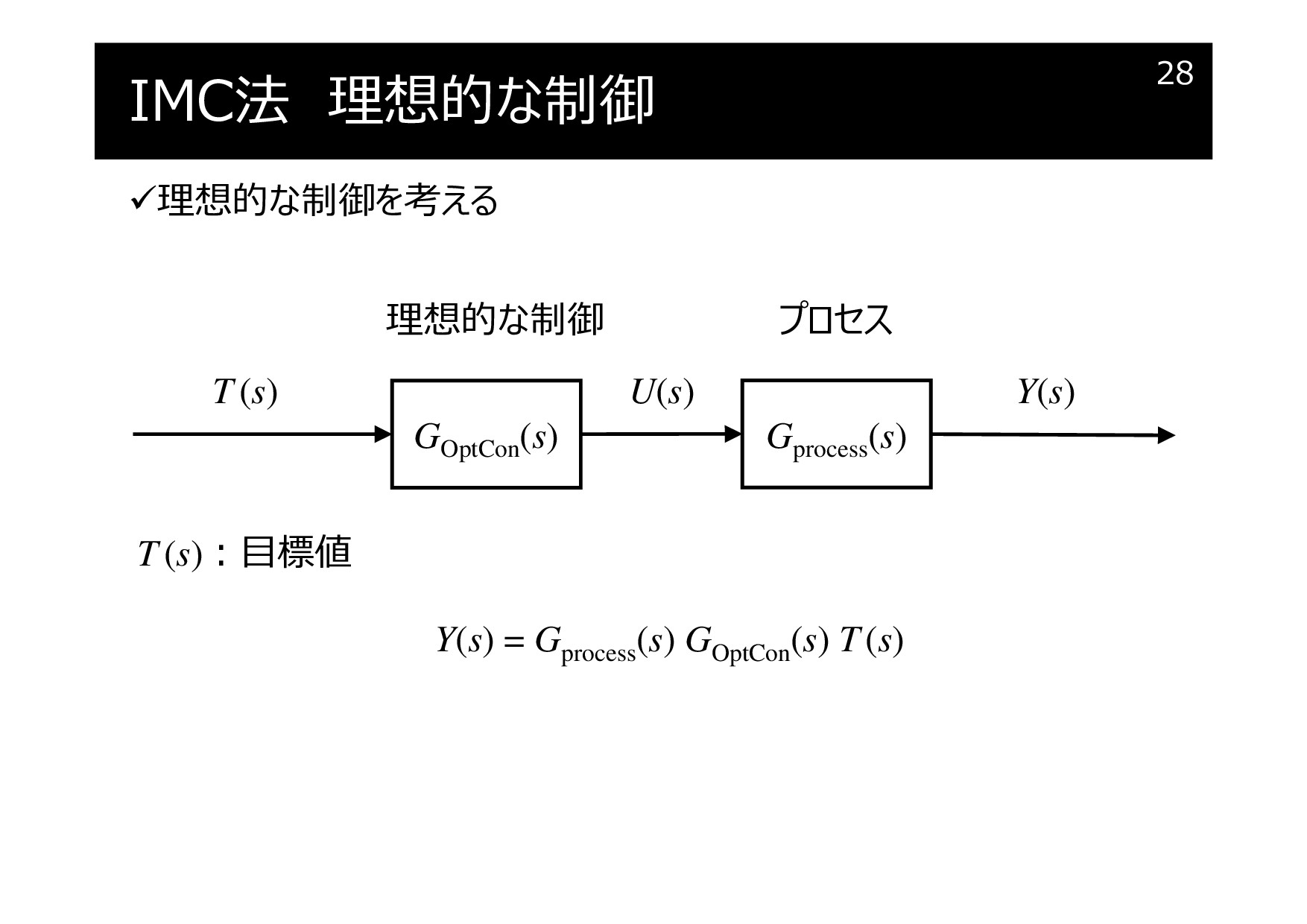
IMC法 理想的な制御
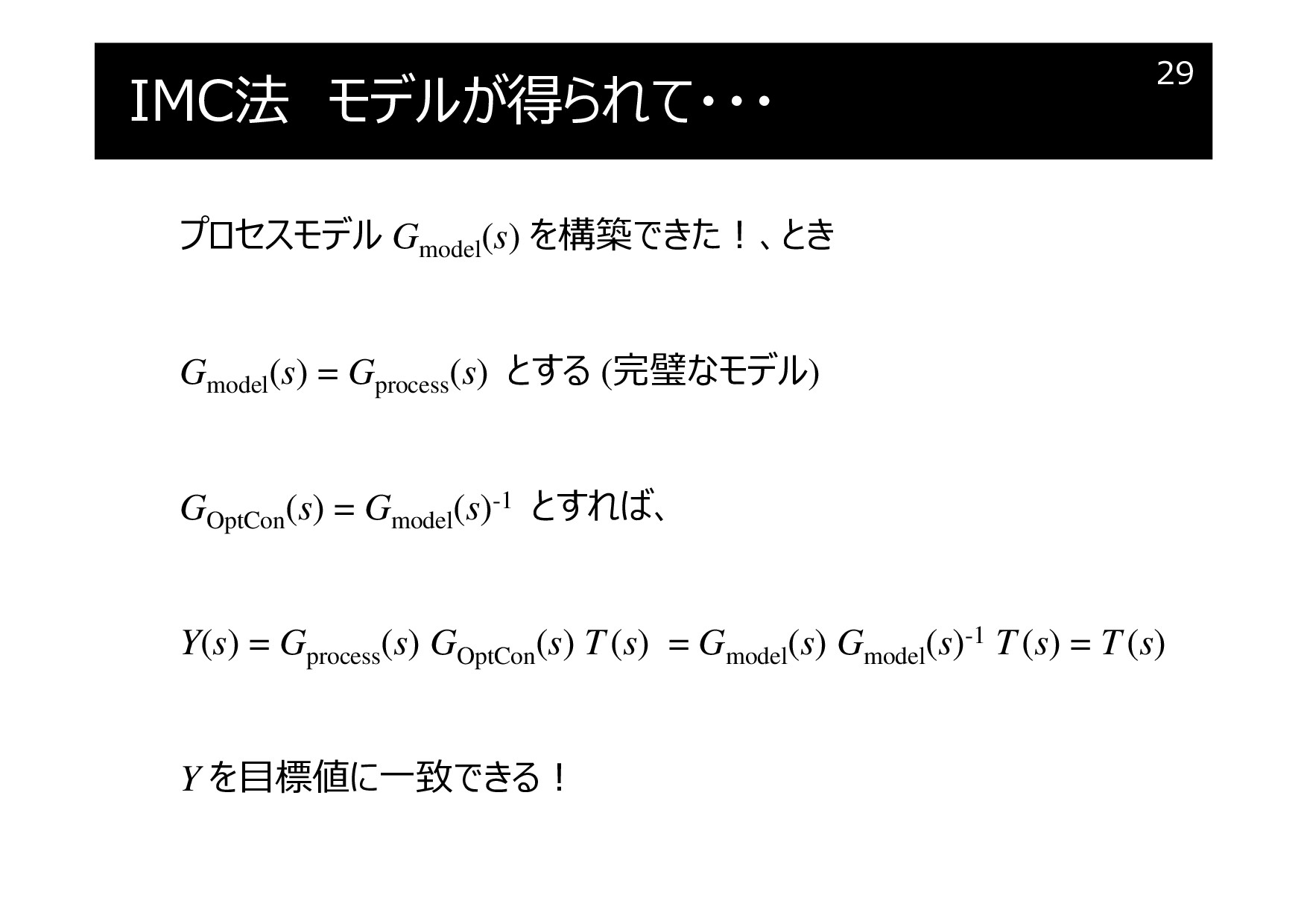
IMC法 モデルが得られて・・・
IMC法 理想的な制御
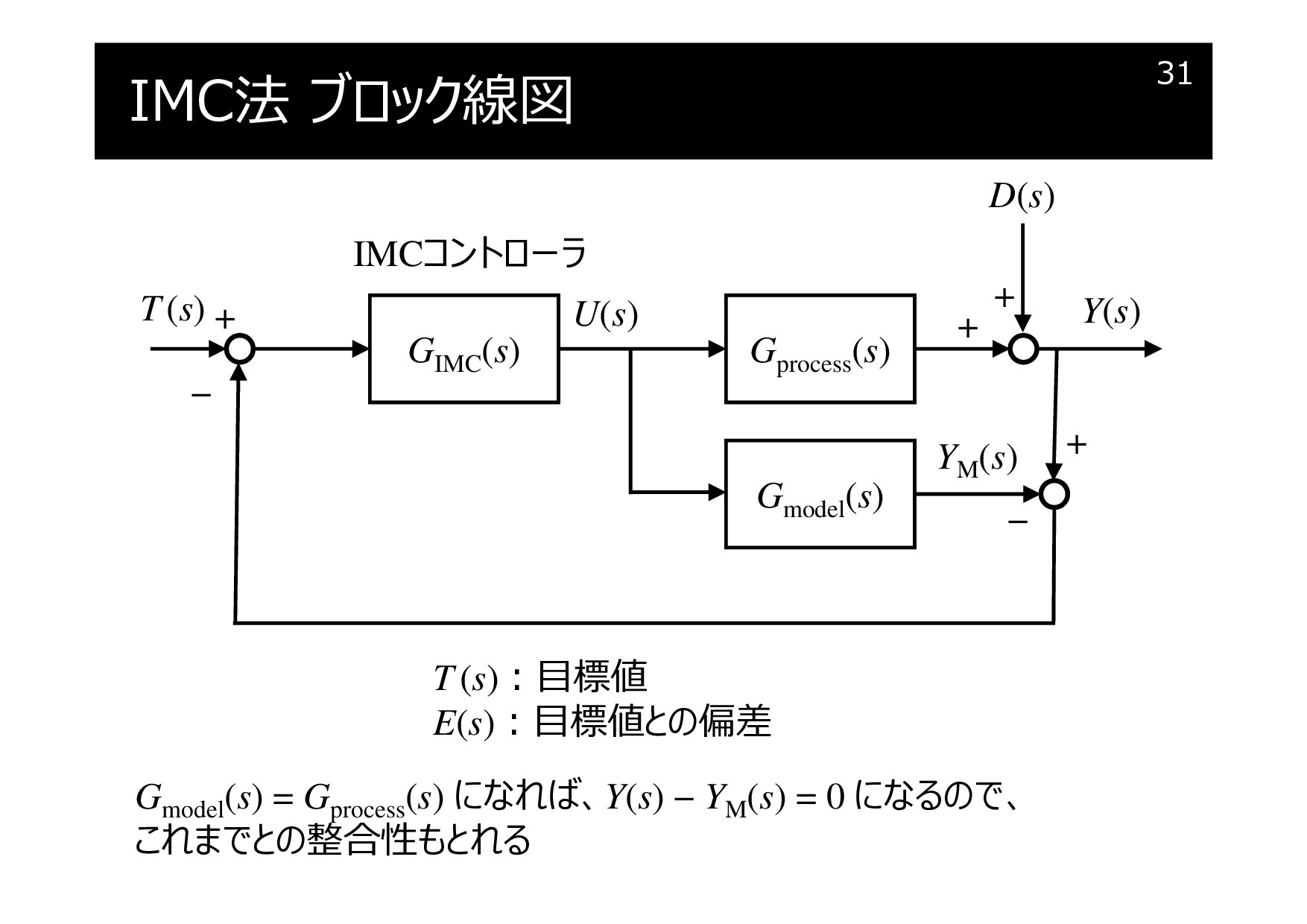
IMC法 ブロック線図
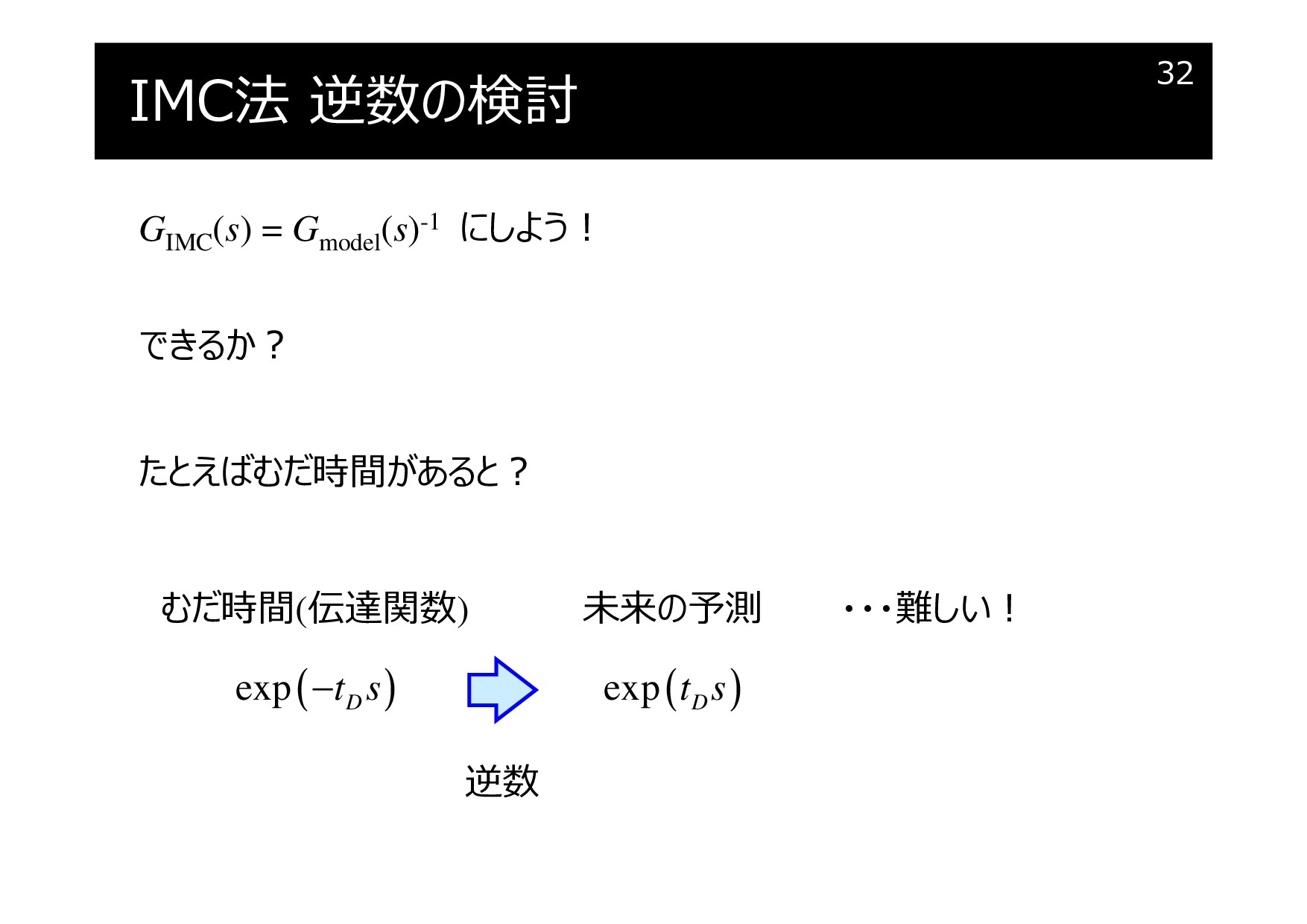
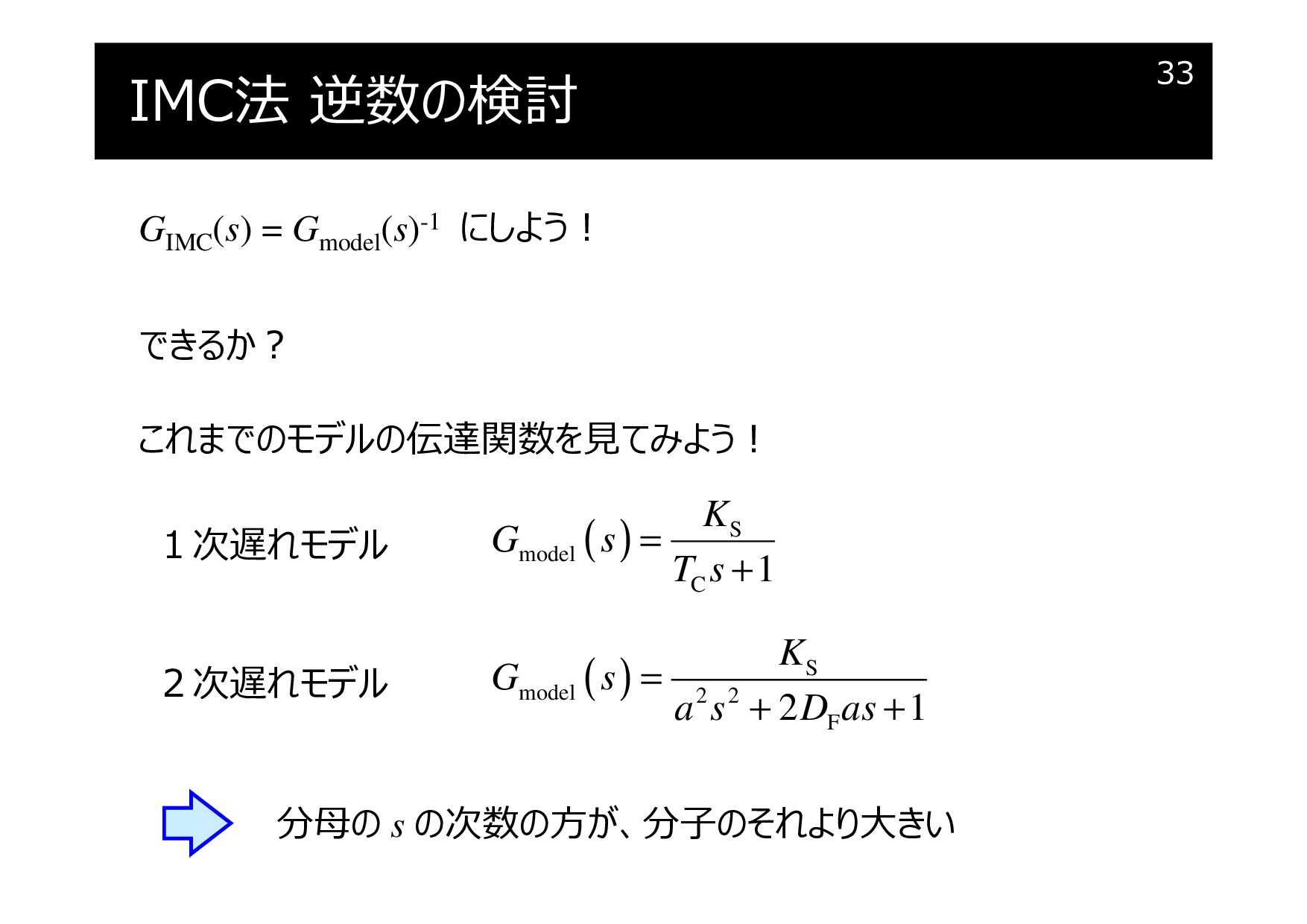
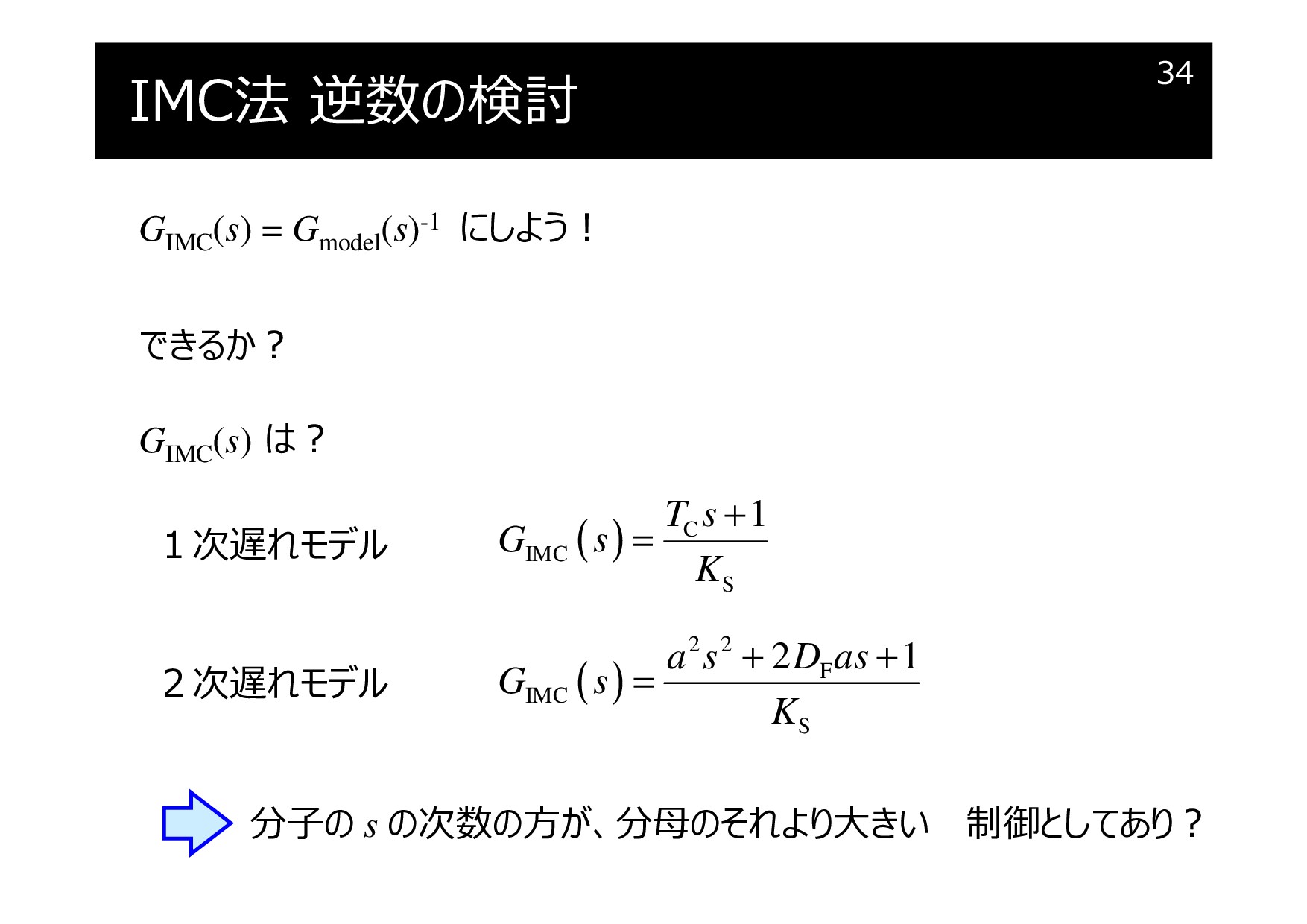
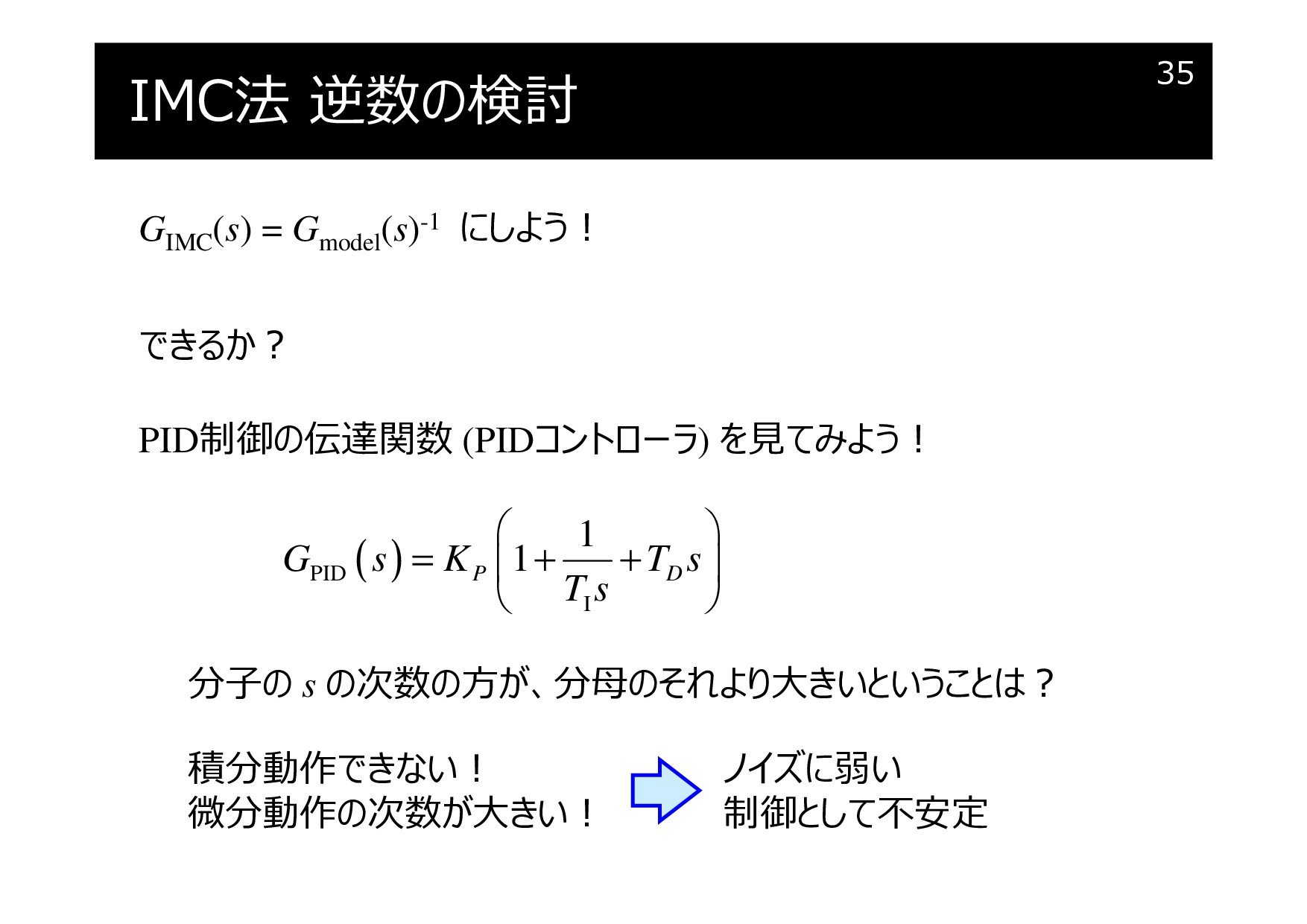
IMC法 逆数の検討
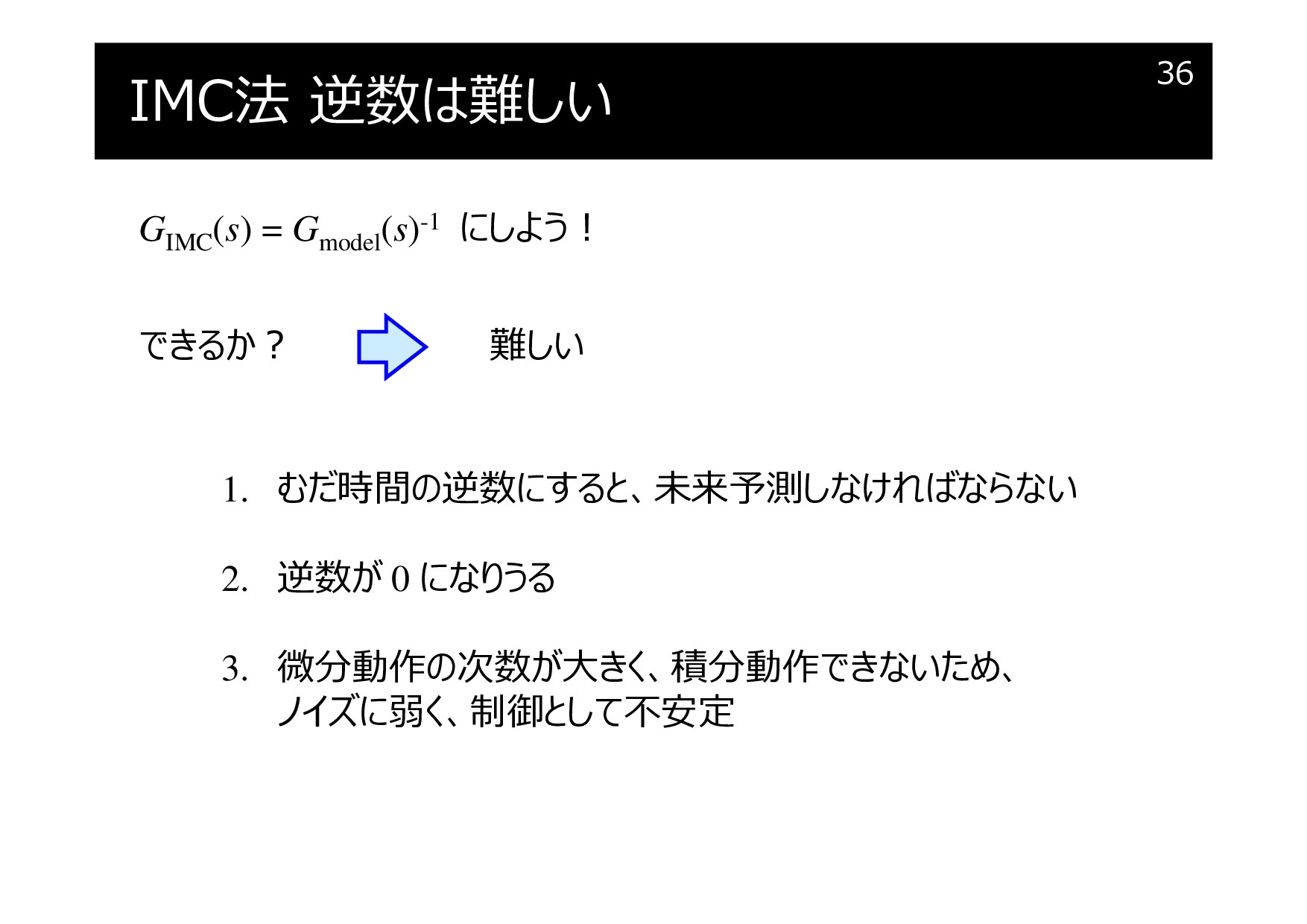
IMC法 逆数は難しい
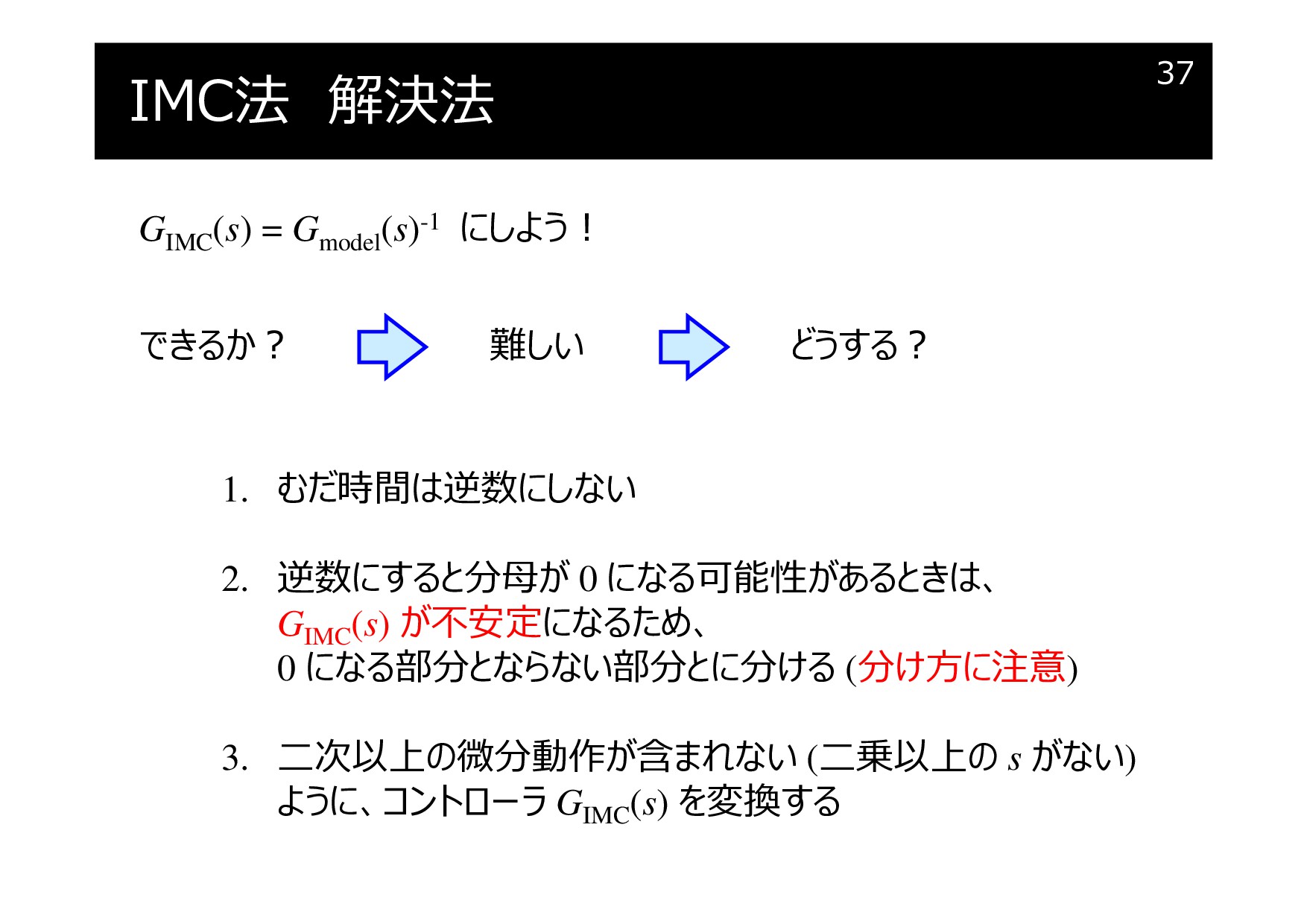
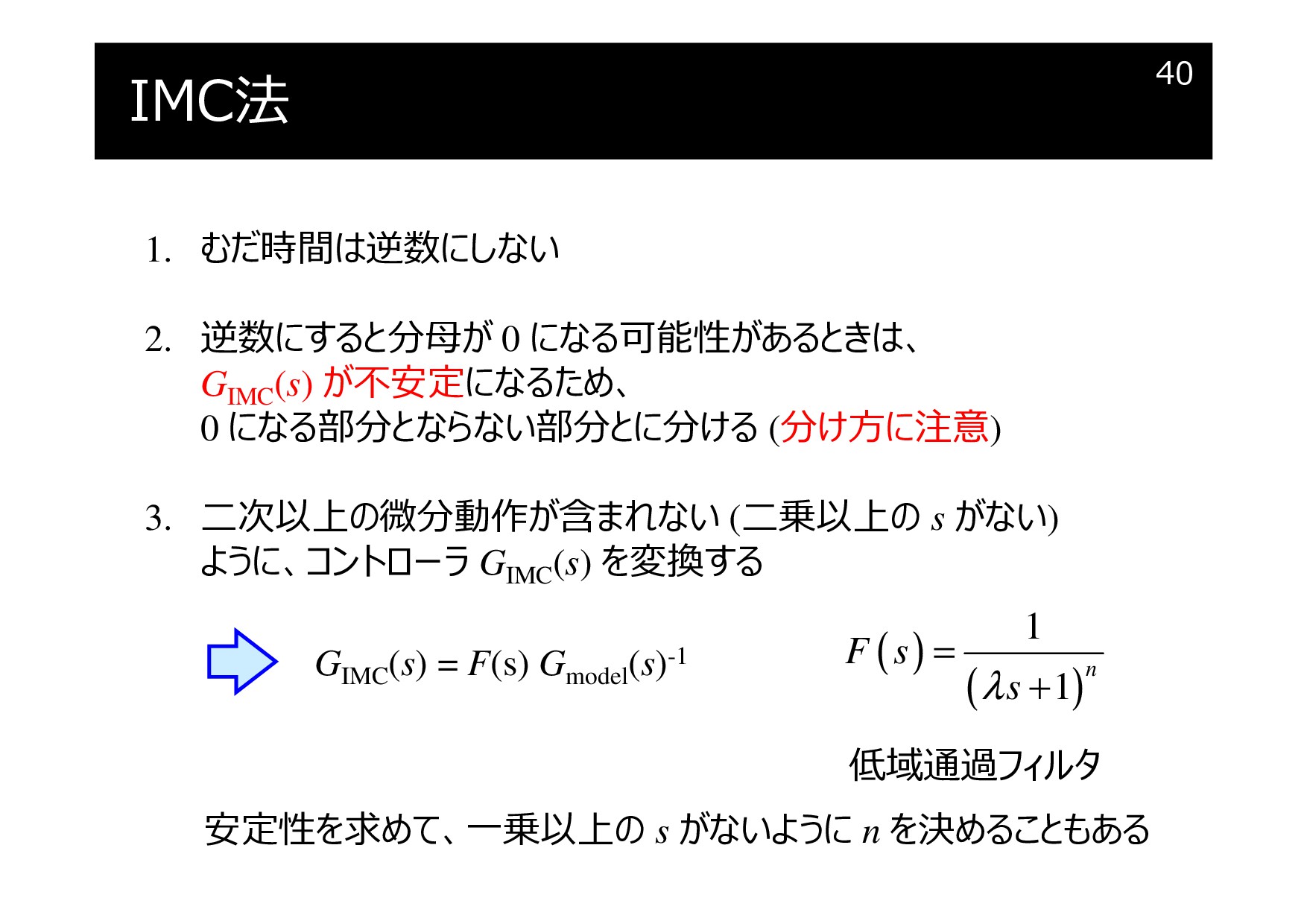
IMC法 解決法
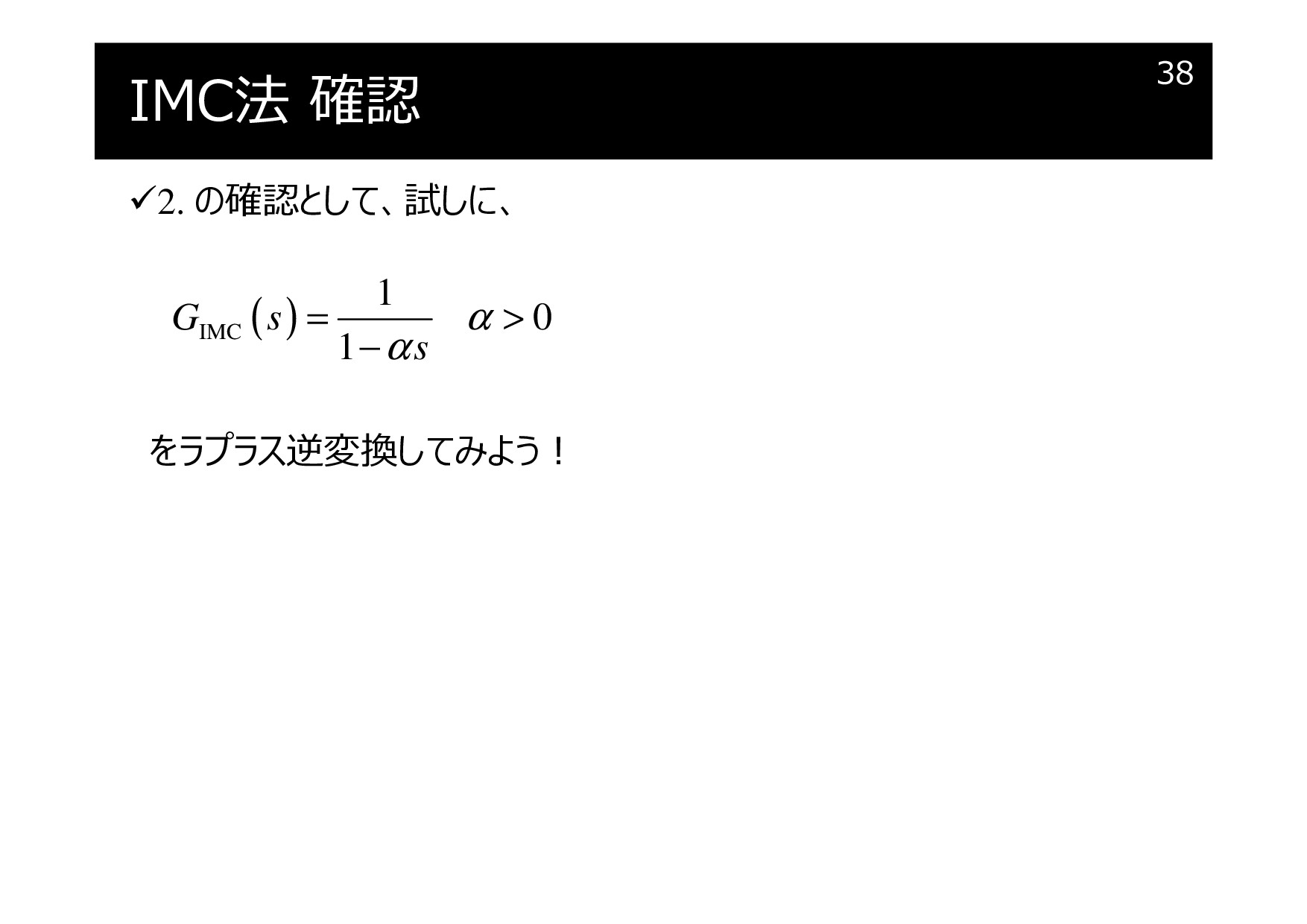
IMC法 確認
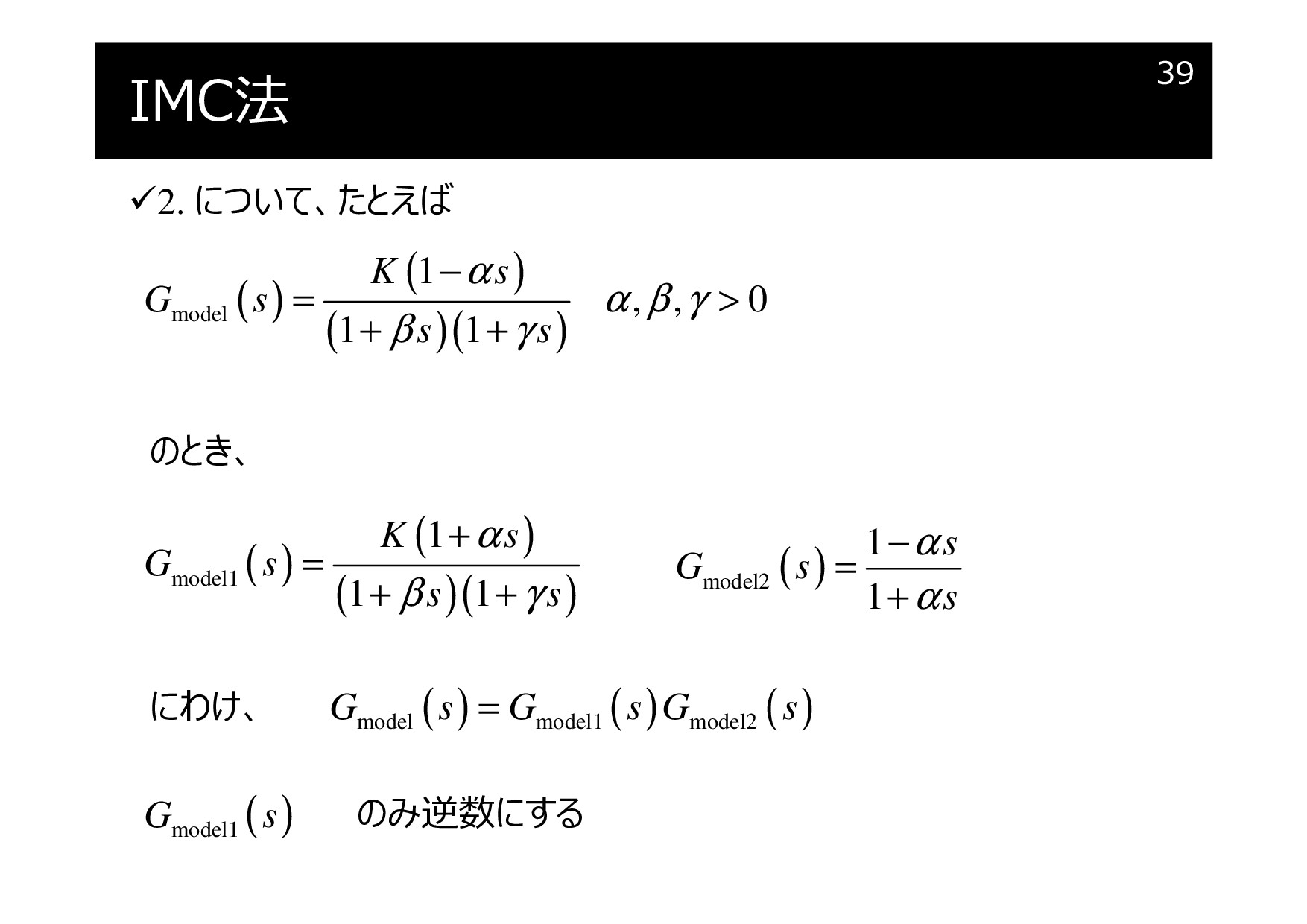
IMC法
IMC法 練習
1次遅れモデルのラプラス変換
1次遅れモデルのIMCコントローラ
IMC法 練習
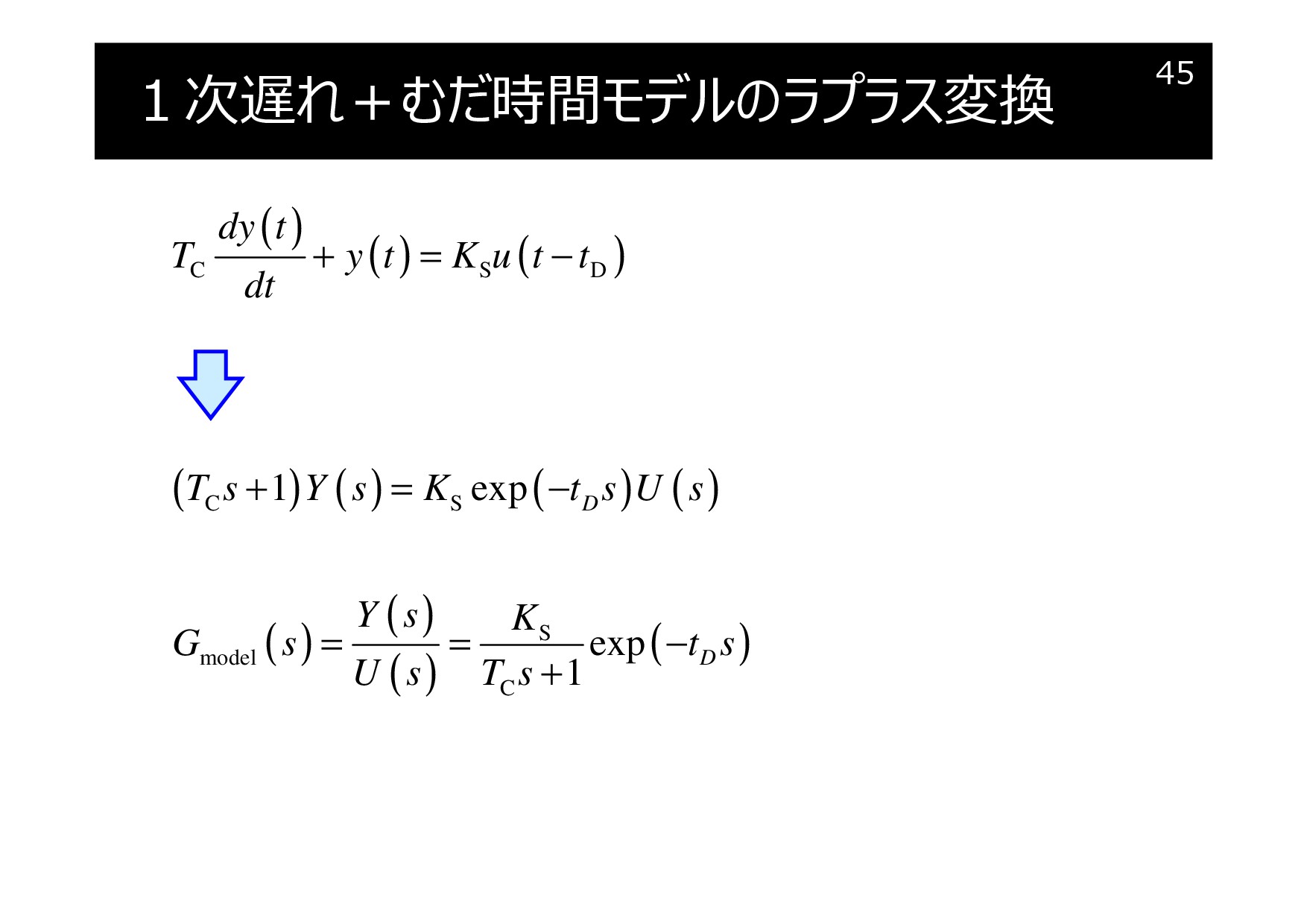
1次遅れ+むだ時間モデルのラプラス変換
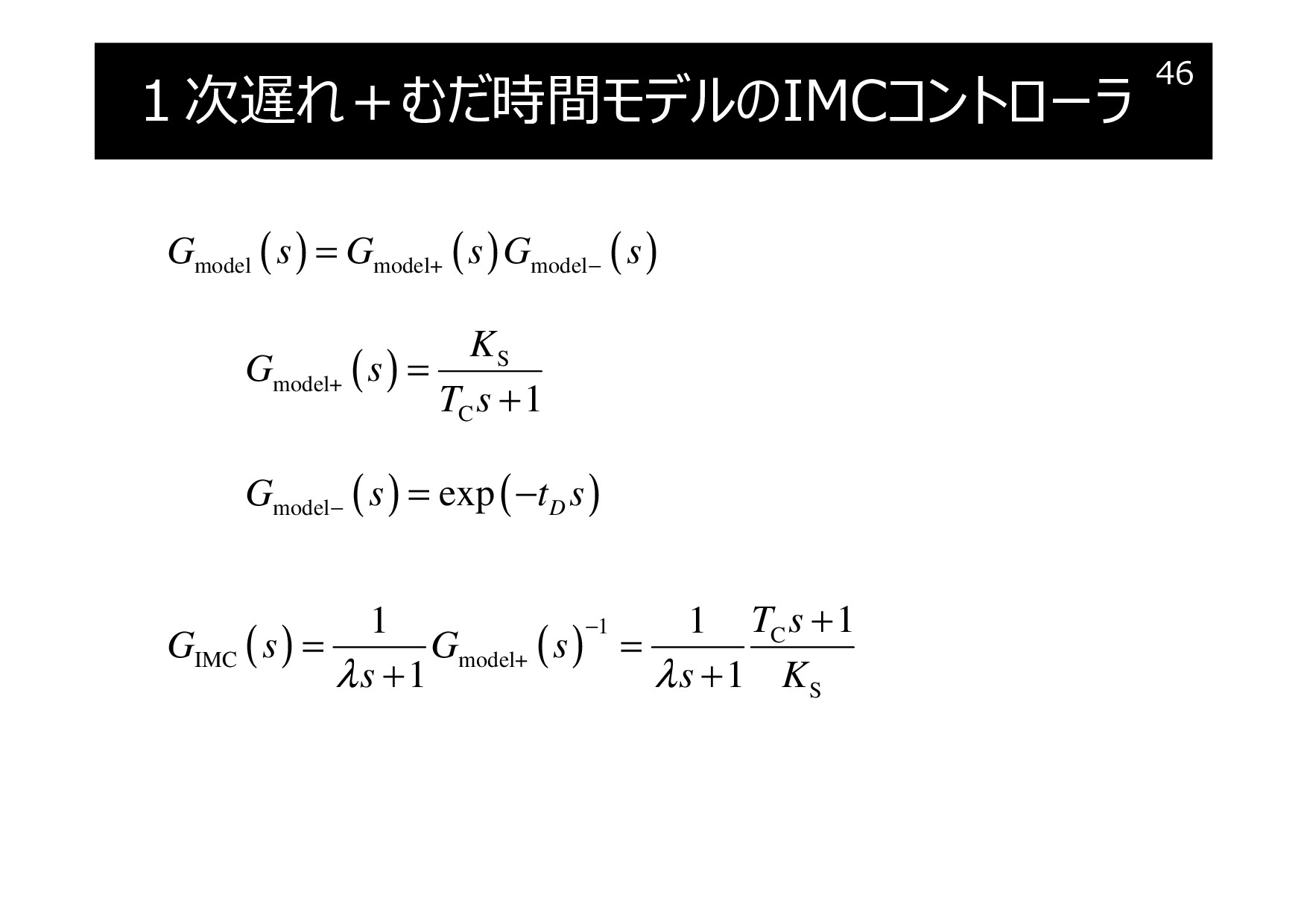
1次遅れ+むだ時間モデルのIMCコントローラ
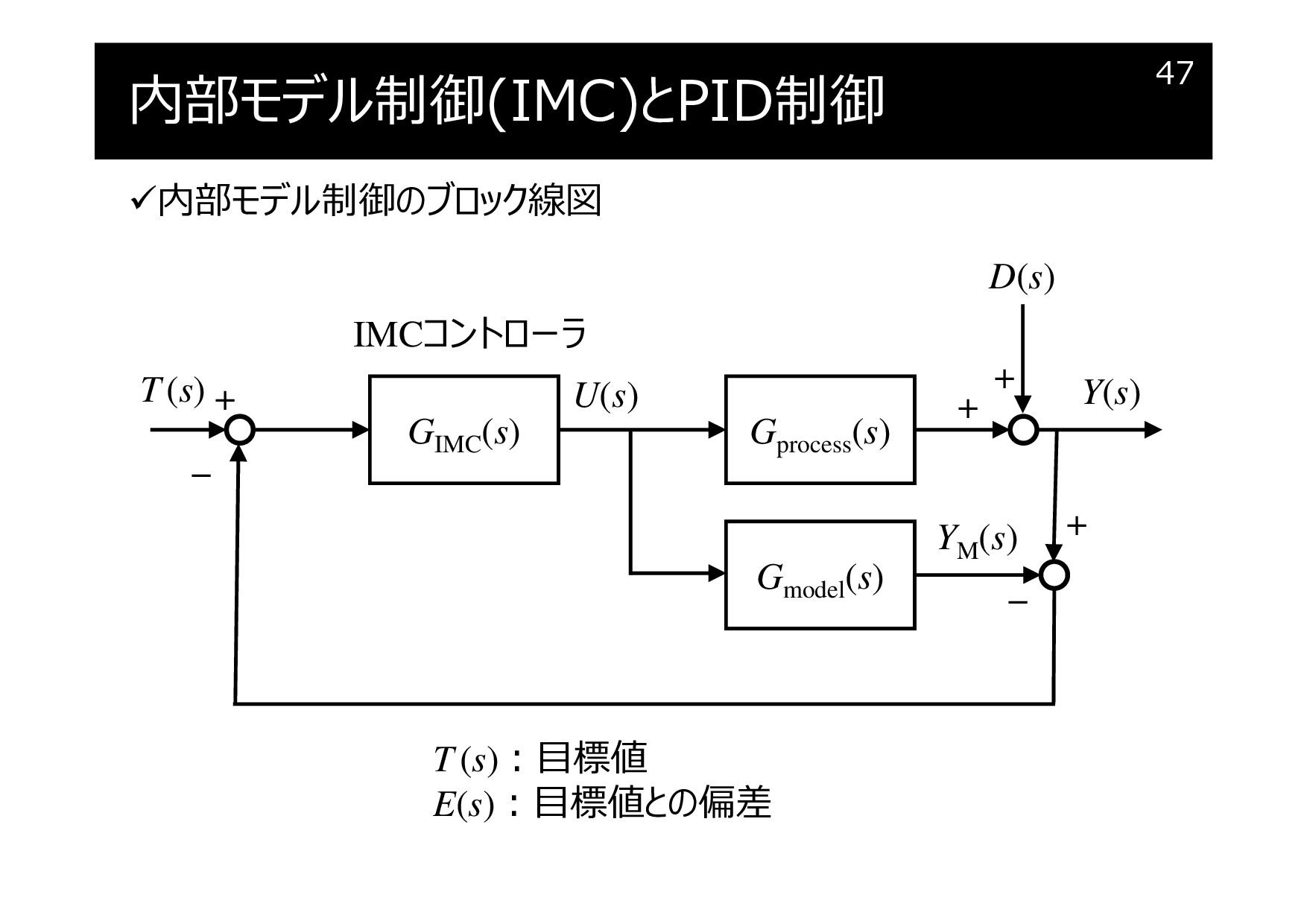
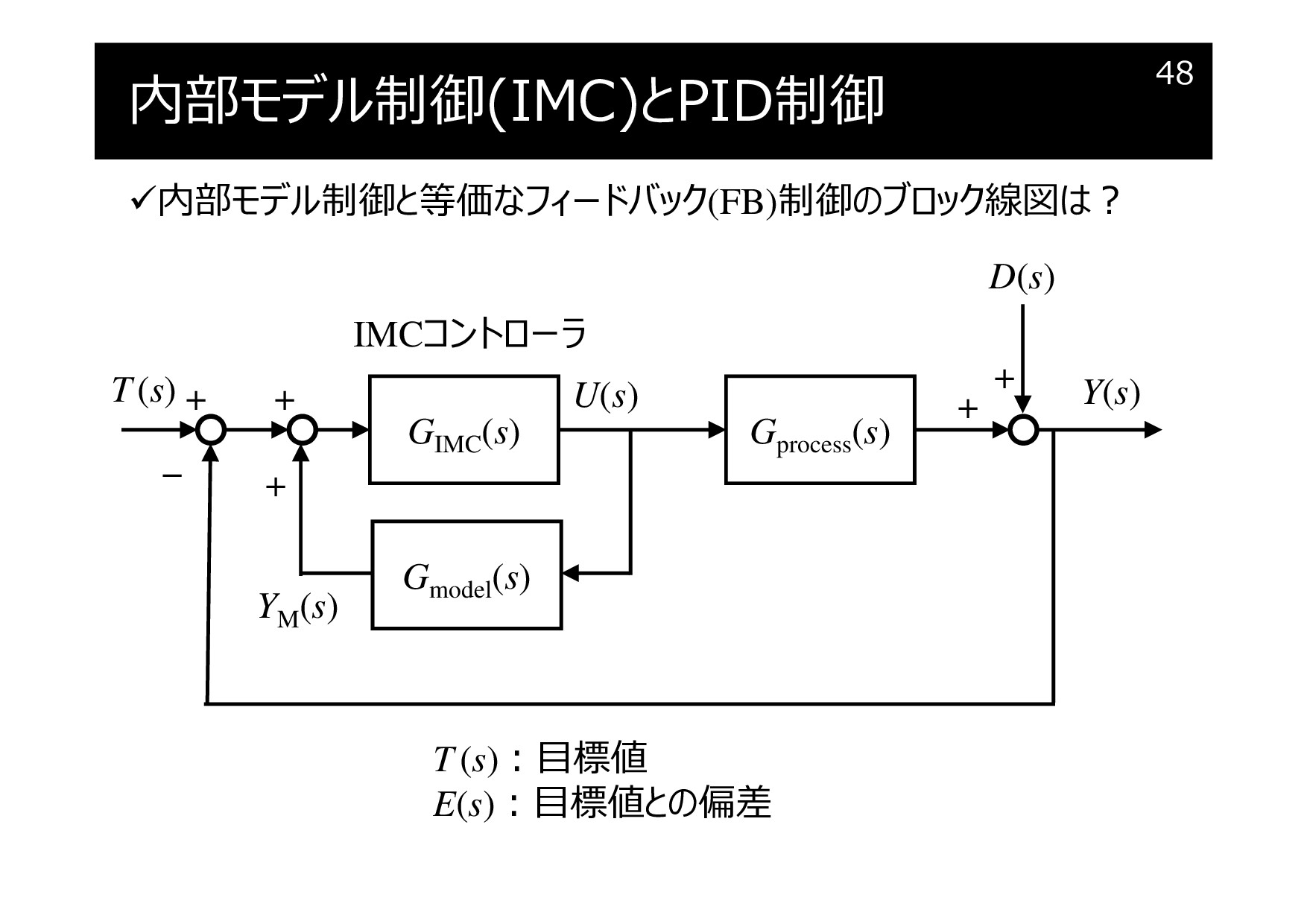
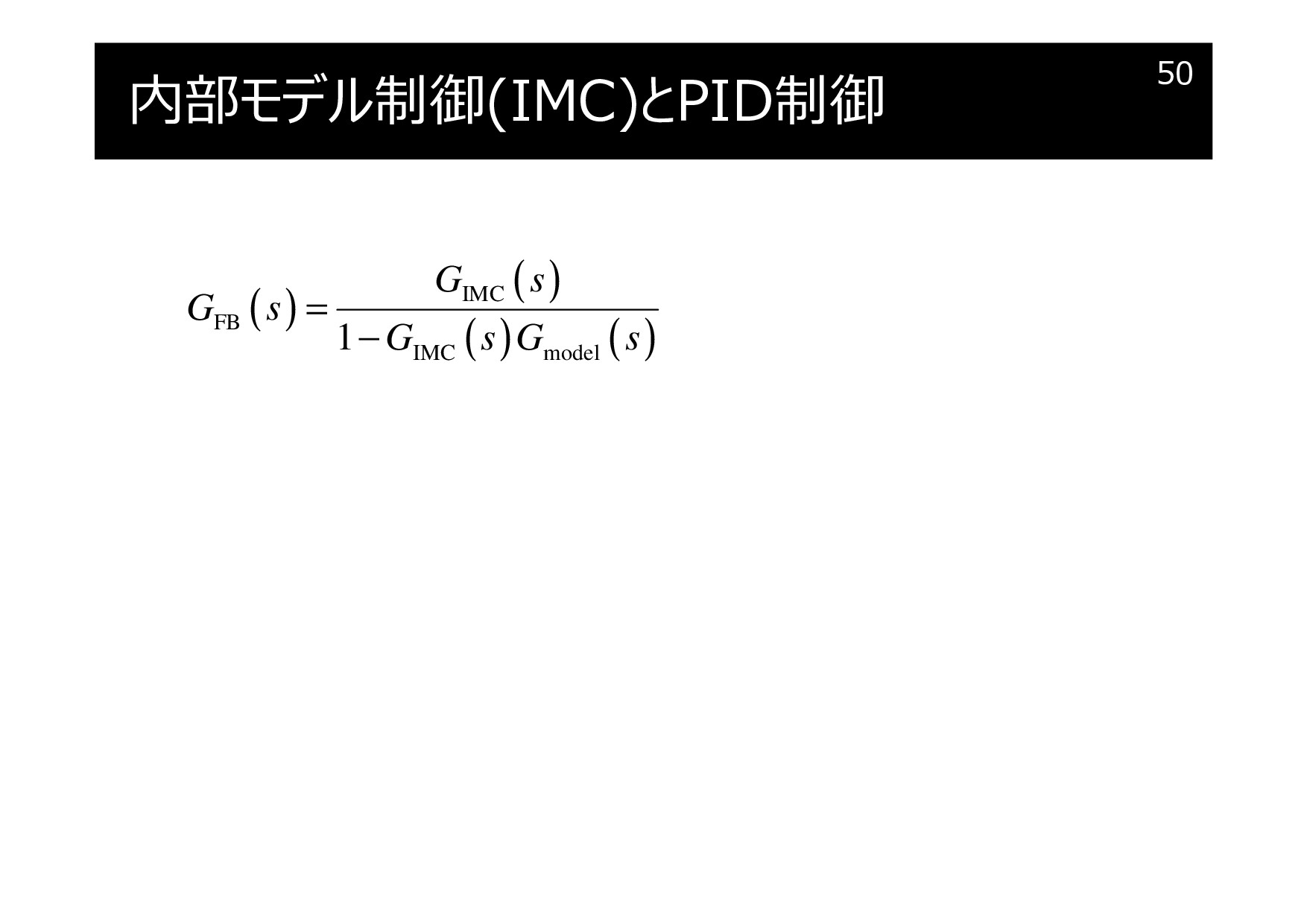
内部モデル制御(IMC)とPID制御
1次遅れモデルとPID制御
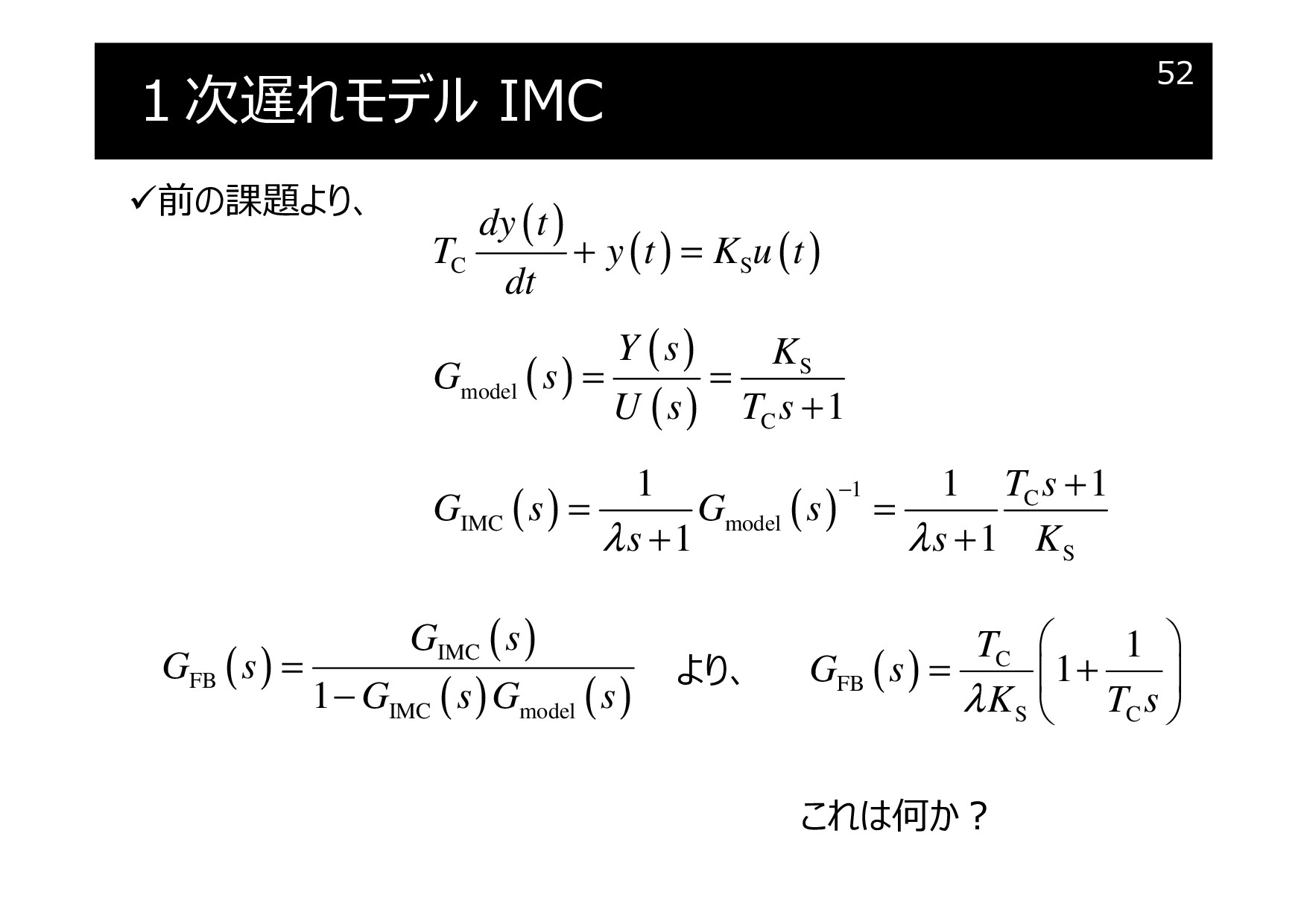
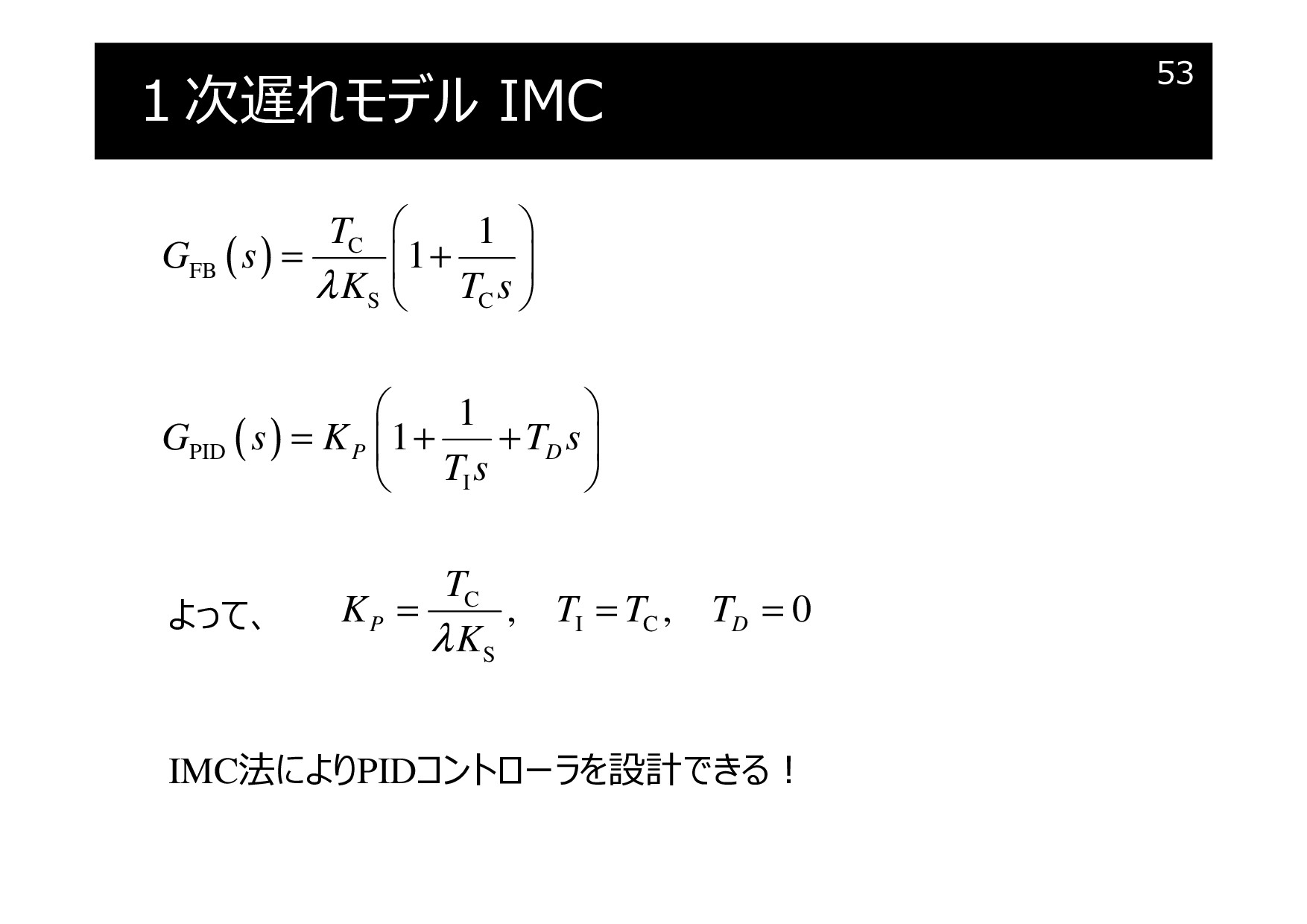
1次遅れモデル IMC
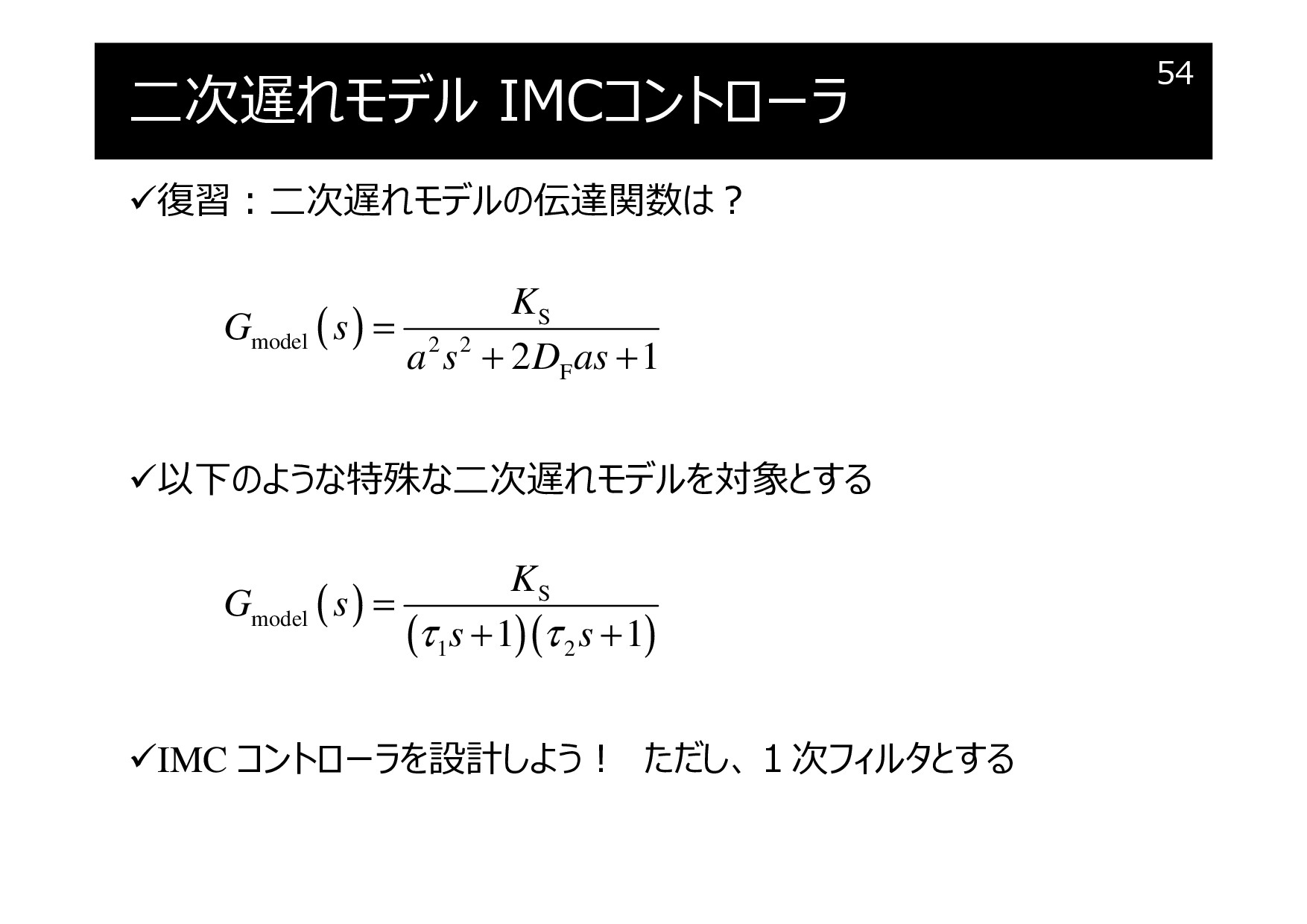
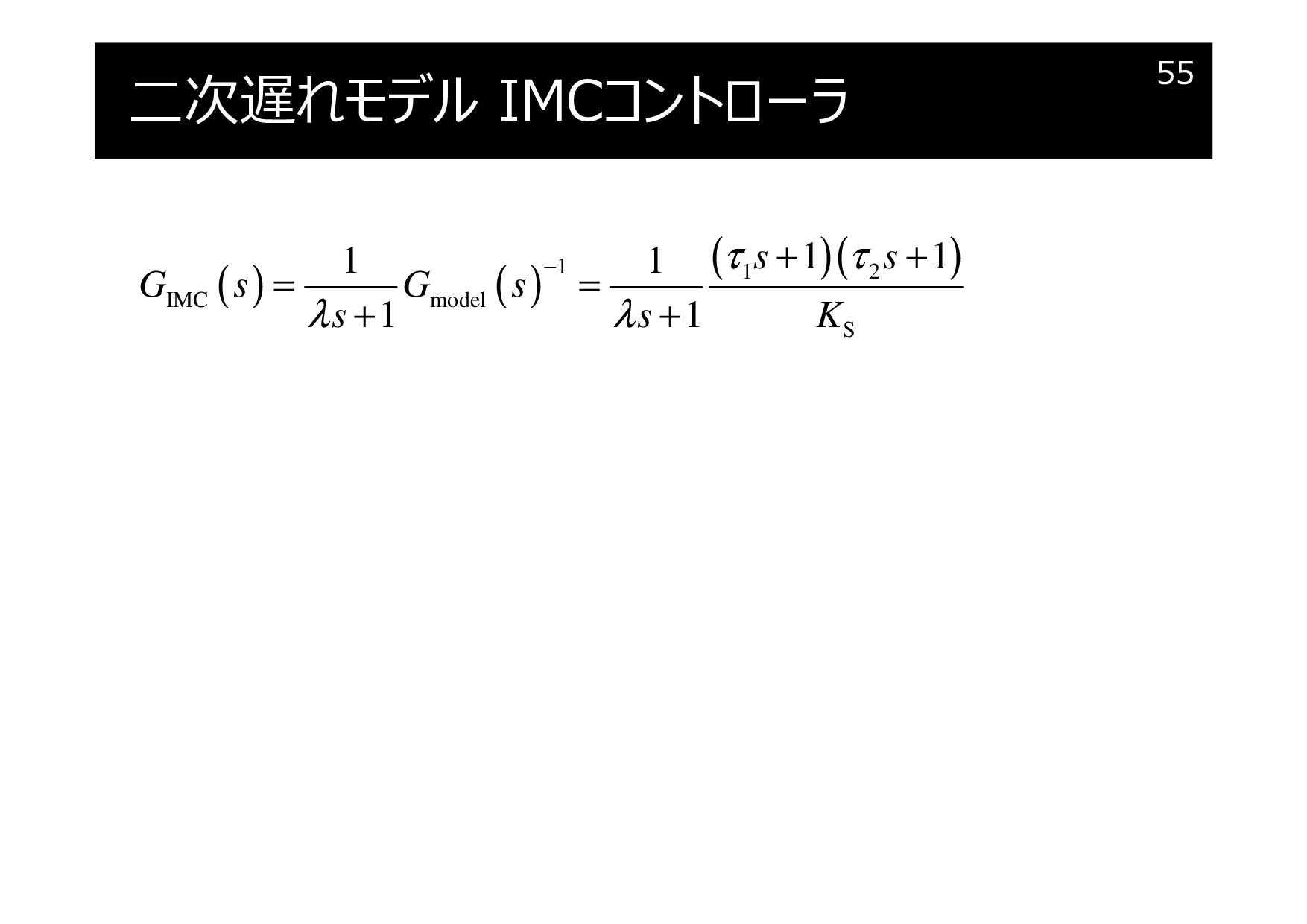
二次遅れモデル IMCコントローラ
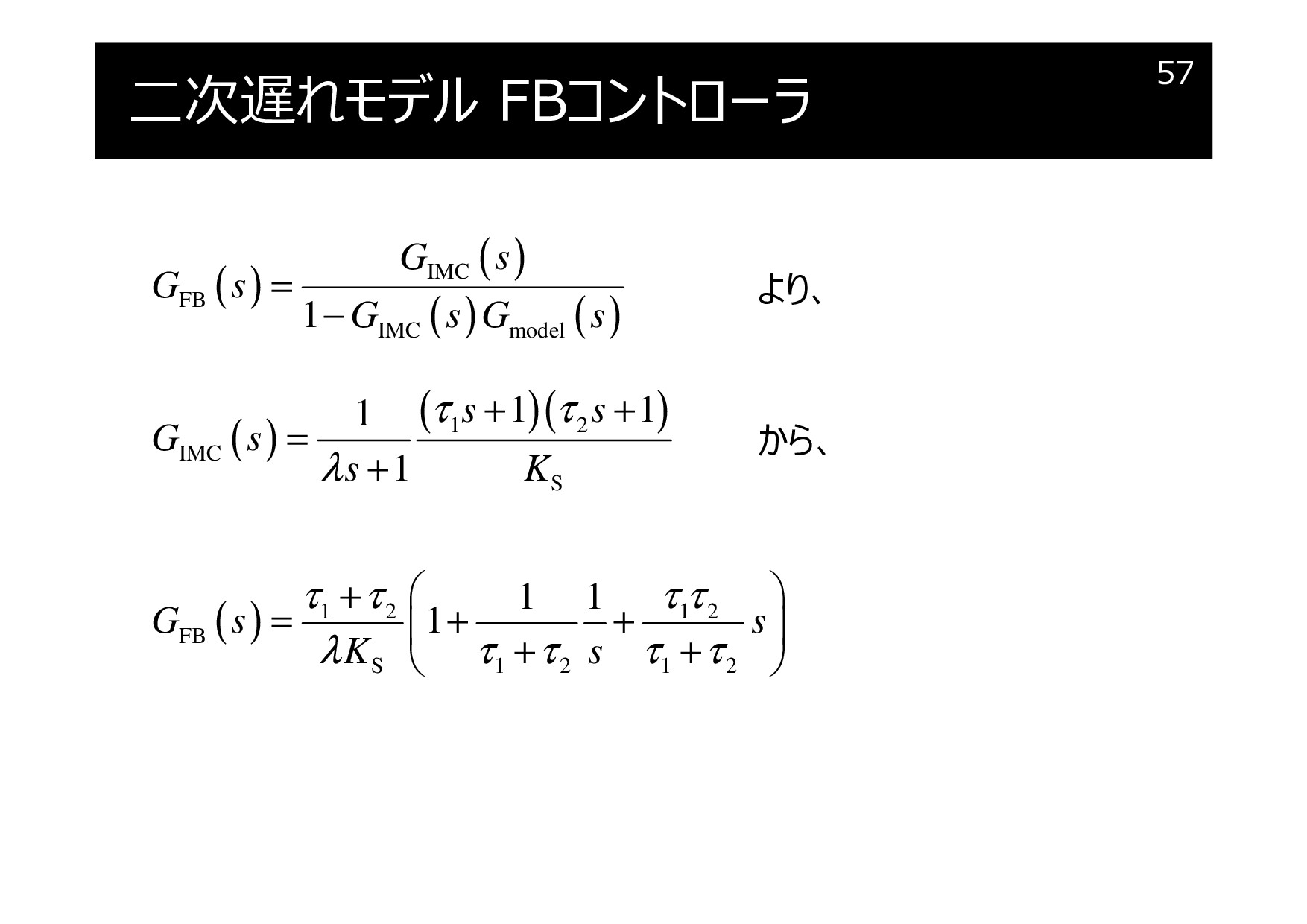
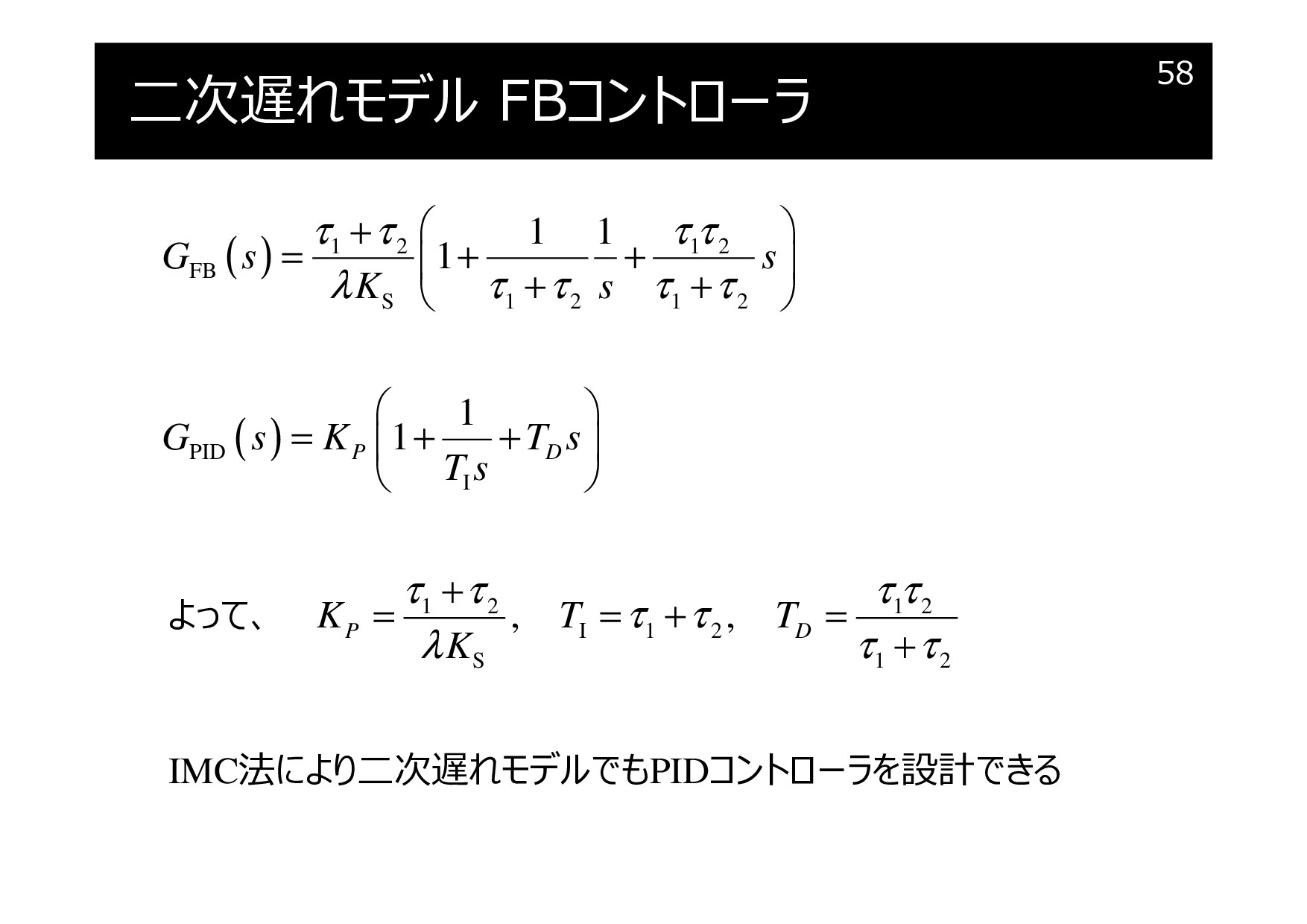
二次遅れモデル FBコントローラ
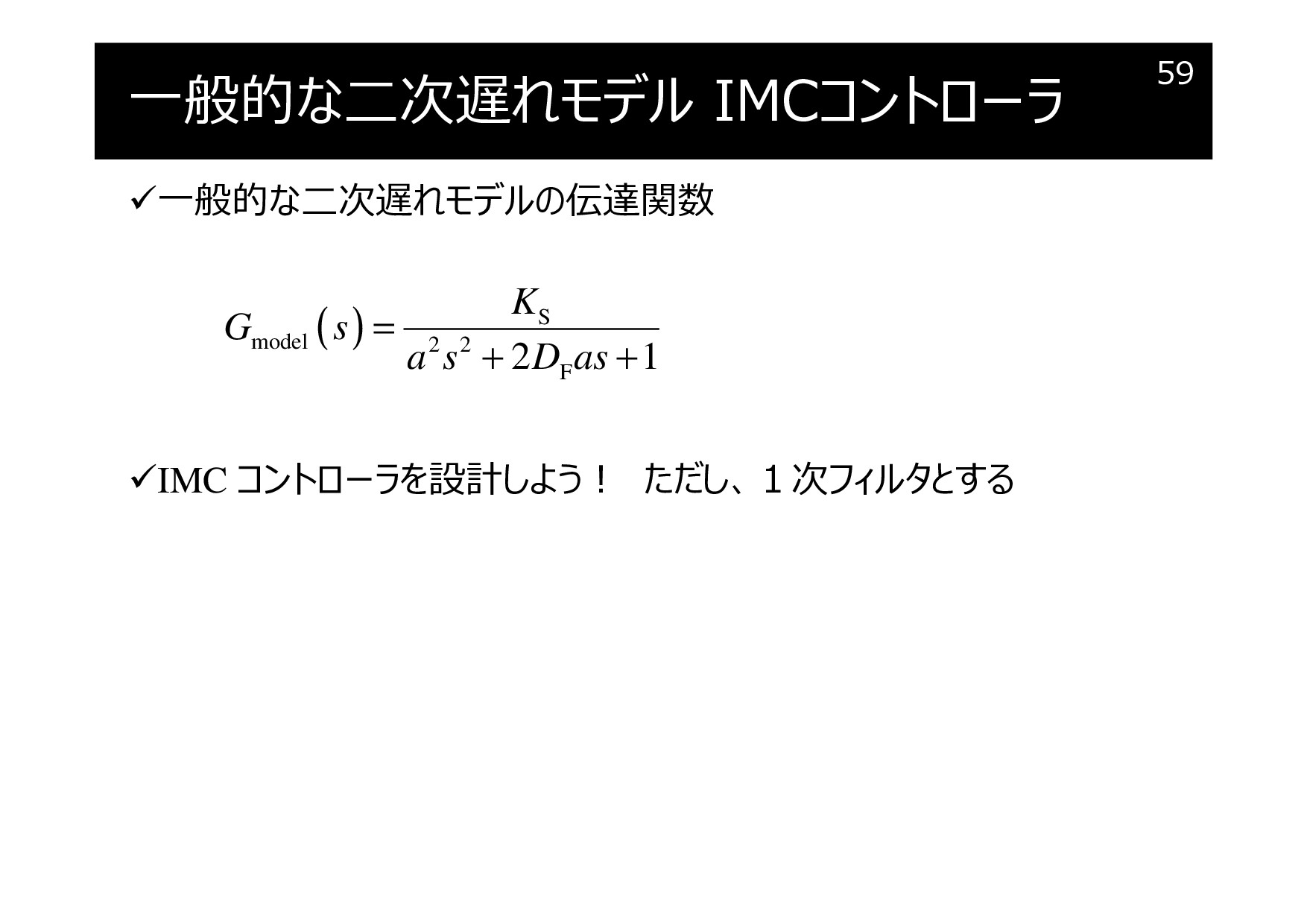
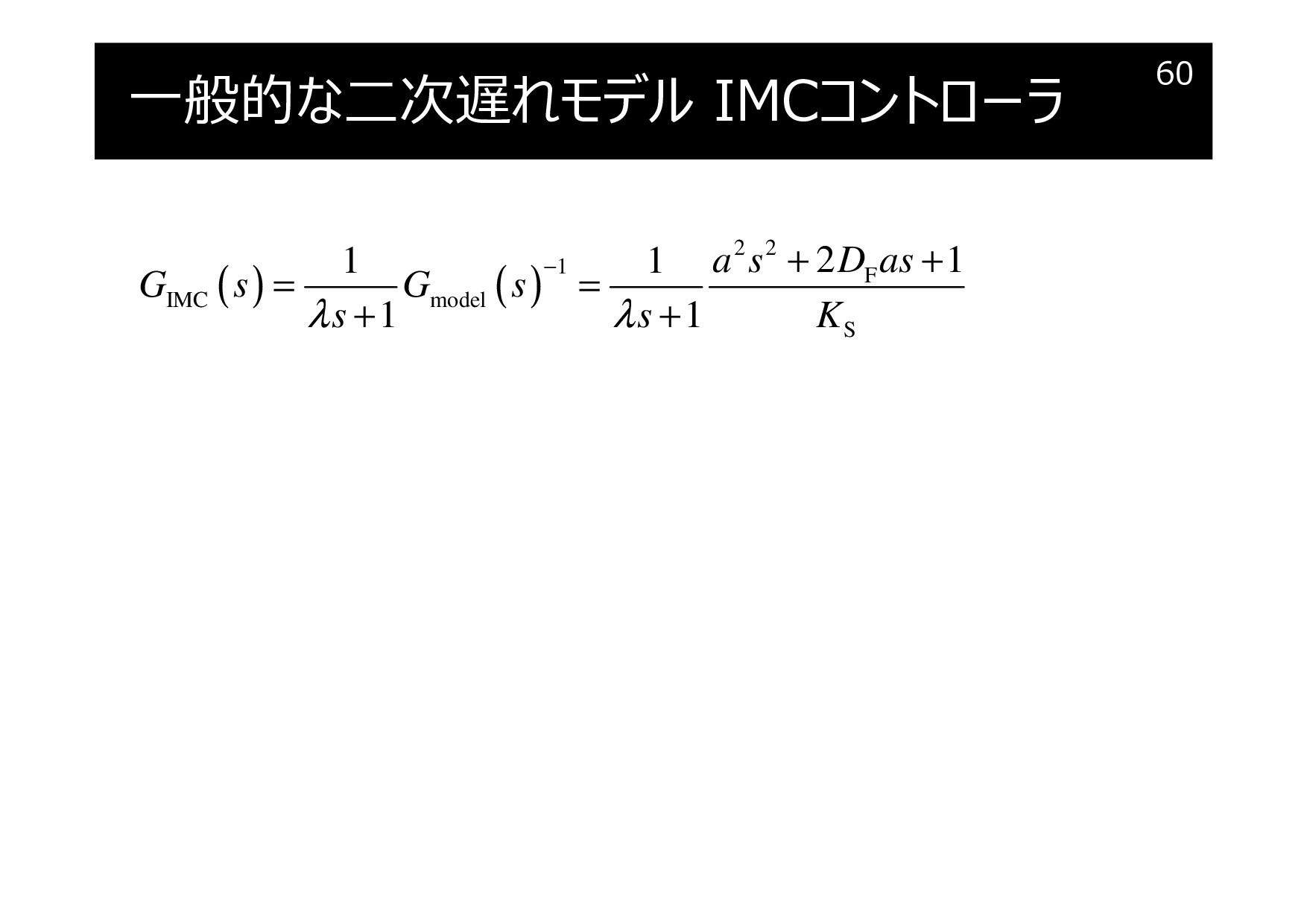
一般的な二次遅れモデル IMCコントローラ
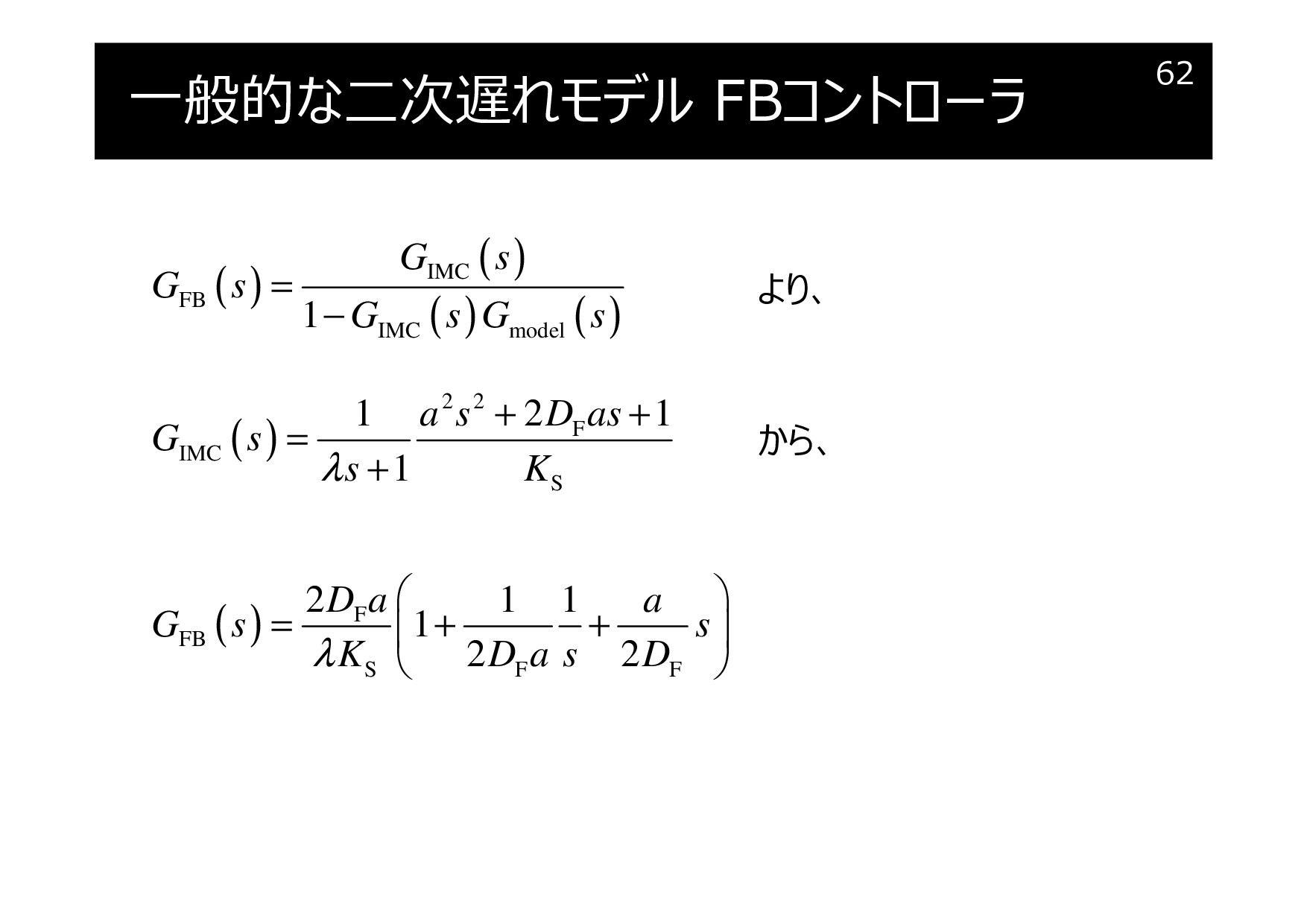
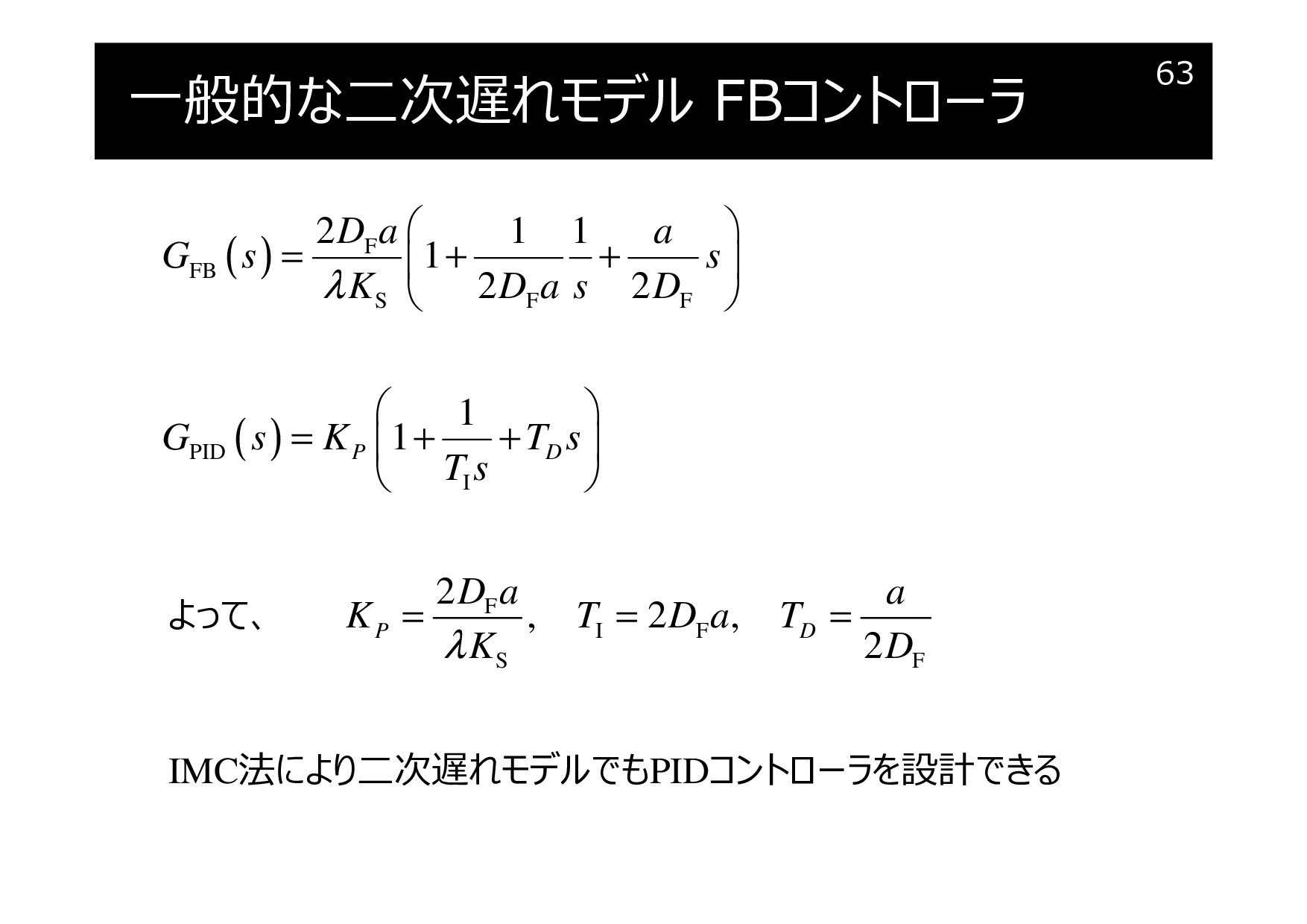
一般的な二次遅れモデル FBコントローラ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![タンクの液面高さ(液レベル)制御 5 A Fi Fo Fi [m3・s-1]︓入⼝流量 Fo [m3・s-1]︓出⼝流量 L](https://files.speakerdeck.com/presentations/8e79eea93795446d8979f3ecf28fb15e/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![[練習] 1次遅れ+むだ時間 モデルの伝達関数は︖ tD [s]︓むだ時間 15 ( ) ( )](https://files.speakerdeck.com/presentations/8e79eea93795446d8979f3ecf28fb15e/slide_15.jpg){kind=link}
![[練習] 2次遅れモデルの伝達関数は︖ 2次遅れモデル (2次遅れ系、2次遅れプロセス、2次遅れ要素) 16 ( ) ( ) (](https://files.speakerdeck.com/presentations/8e79eea93795446d8979f3ecf28fb15e/slide_16.jpg){kind=link}
![[練習] PID制御の伝達関数は︖ PID制御 17 ( ) ( ) ( )](https://files.speakerdeck.com/presentations/8e79eea93795446d8979f3ecf28fb15e/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![[練習] 少し複雑な流体加熱プロセス これは何結合︖ 22 Q Tm , V1 , ρ,](https://files.speakerdeck.com/presentations/8e79eea93795446d8979f3ecf28fb15e/slide_22.jpg){kind=link}
![[練習] 少し複雑な流体加熱プロセス 23 ( ) 2 m dT F T](https://files.speakerdeck.com/presentations/8e79eea93795446d8979f3ecf28fb15e/slide_23.jpg){kind=link}
![[練習] 伝達関数を求めよう︕ 24 ( ) 2 m dT F T](https://files.speakerdeck.com/presentations/8e79eea93795446d8979f3ecf28fb15e/slide_24.jpg){kind=link}
![[練習] 伝達関数 25 タンク1 タンク2 ( ) ( ) (](https://files.speakerdeck.com/presentations/8e79eea93795446d8979f3ecf28fb15e/slide_25.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}