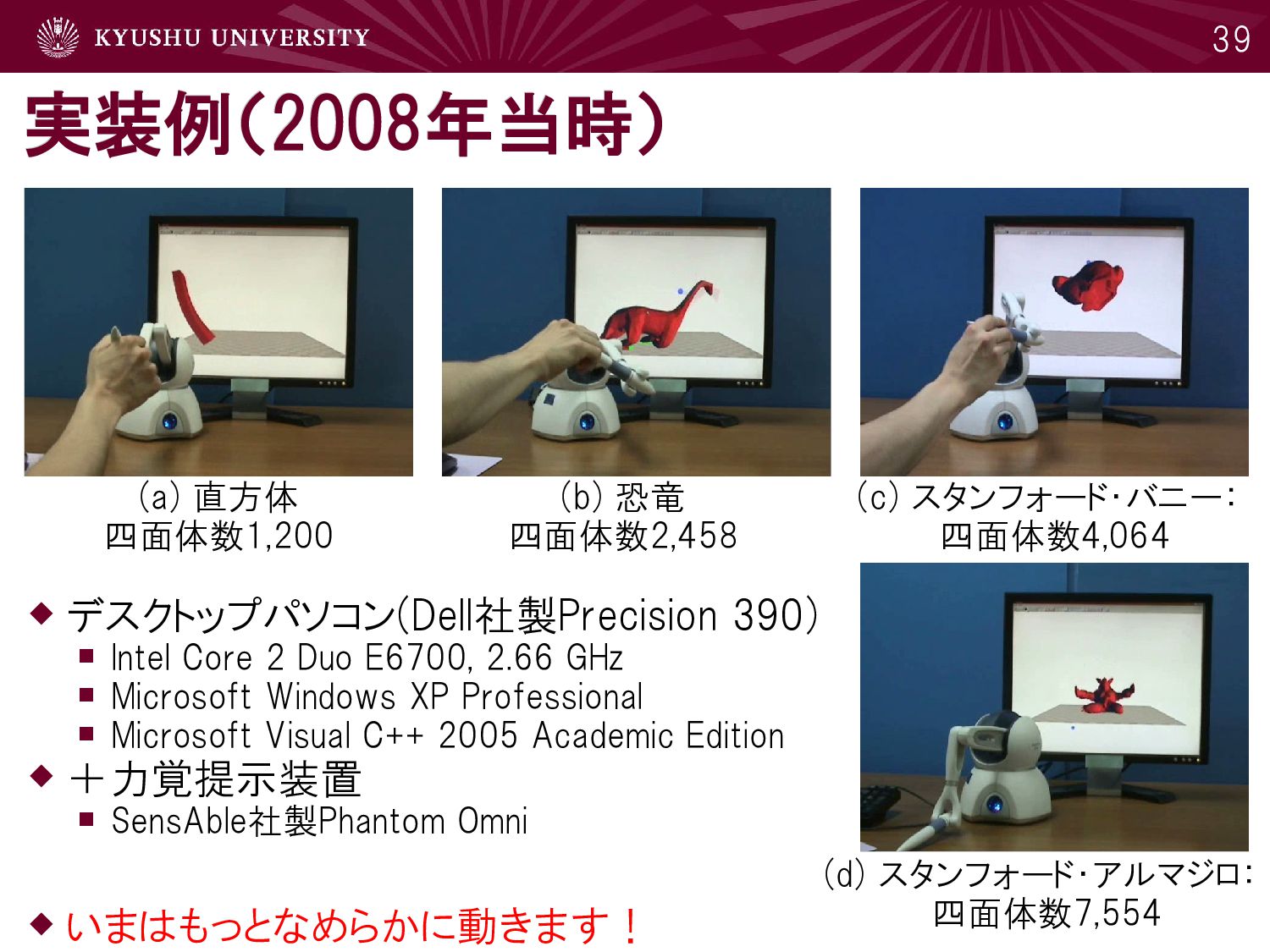
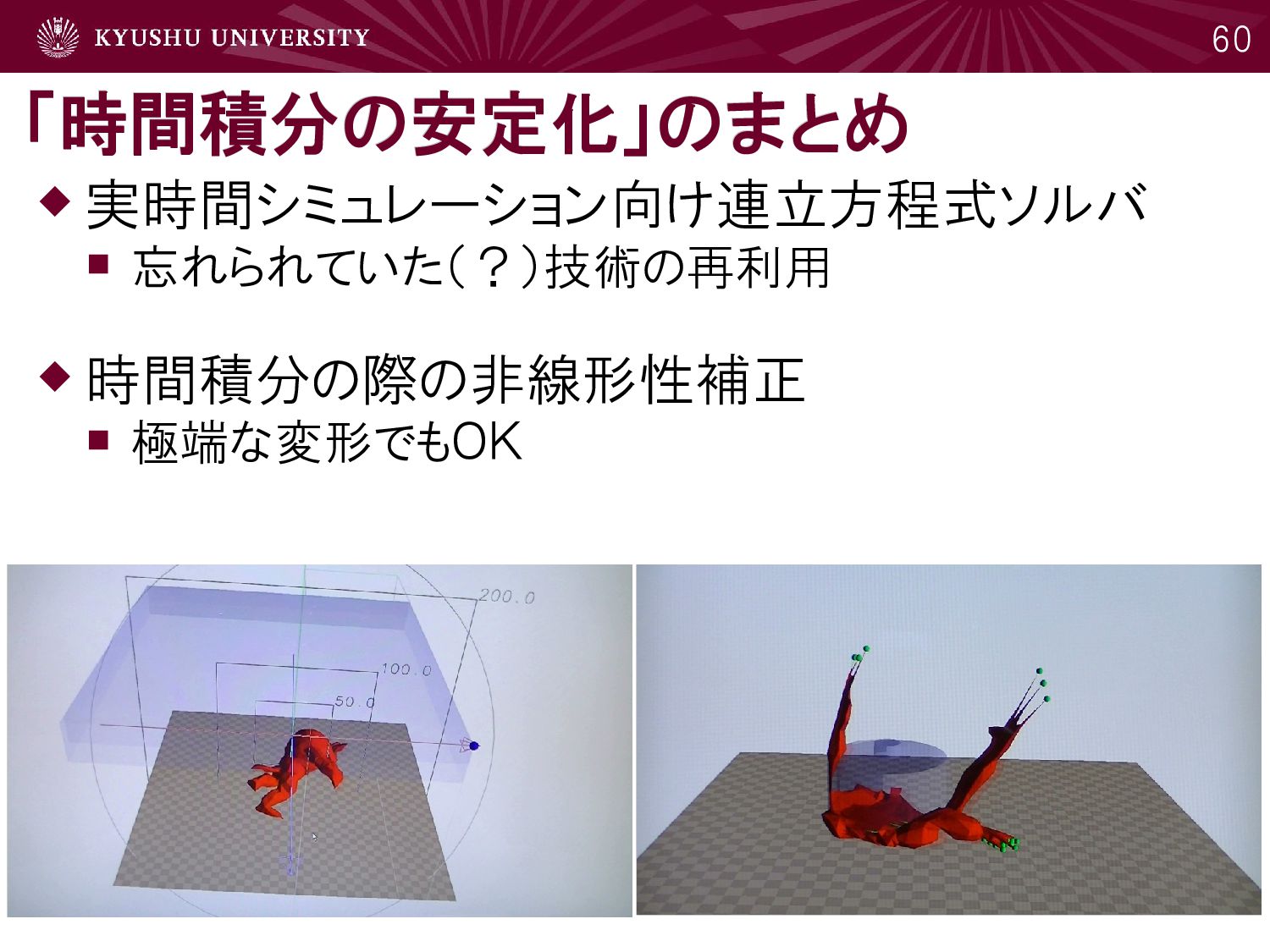
四面体数2,458 (c) スタンフォード・バニー: 四面体数4,064 (d) スタンフォード・アルマジロ: 四面体数7,554 デスクトップパソコン(Dell社製Precision 390) Intel Core 2 Duo E6700, 2.66 GHz Microsoft Windows XP Professional Microsoft Visual C++ 2005 Academic Edition +力覚提示装置 SensAble社製Phantom Omni いまはもっとなめらかに動きます!
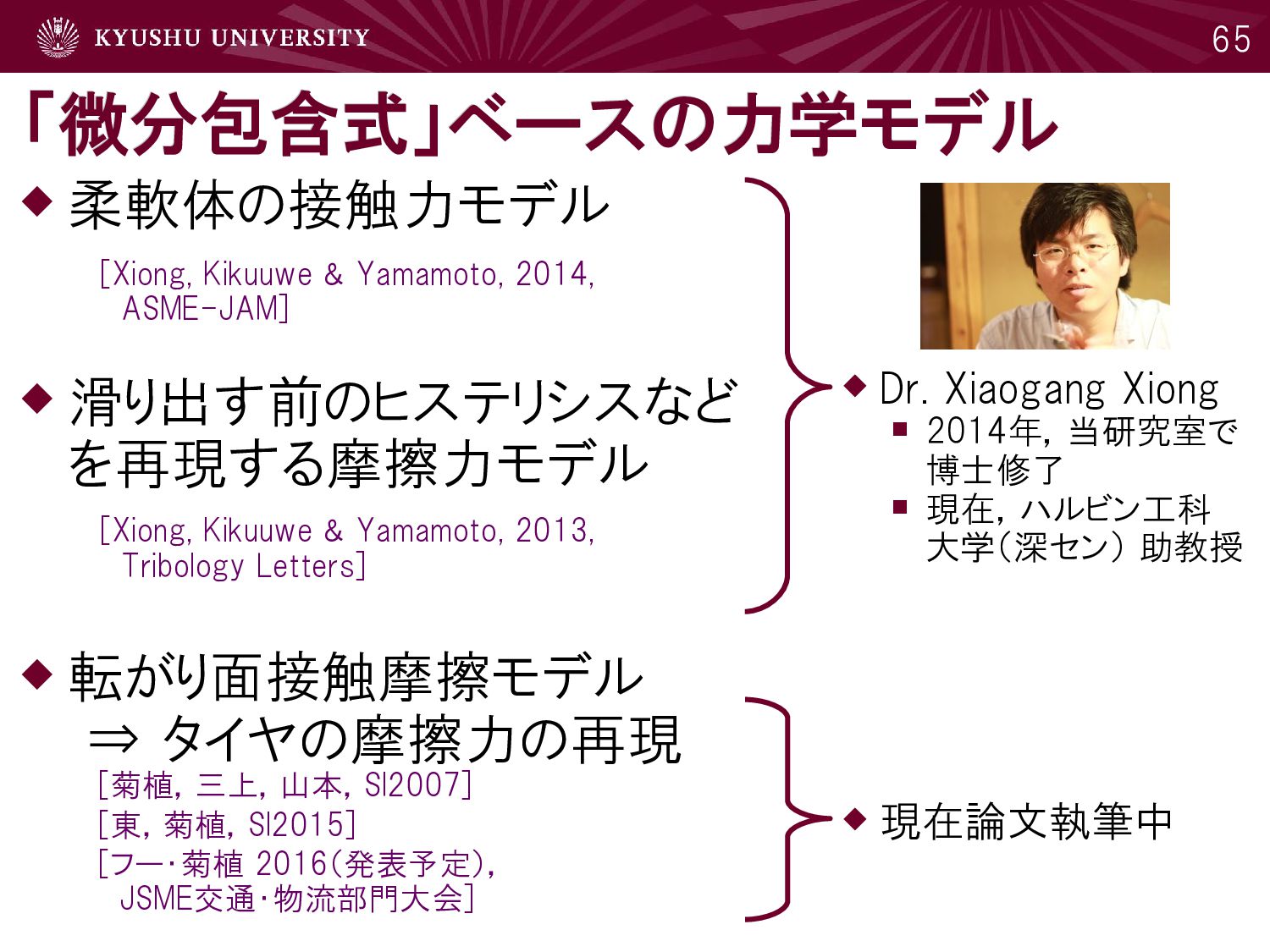
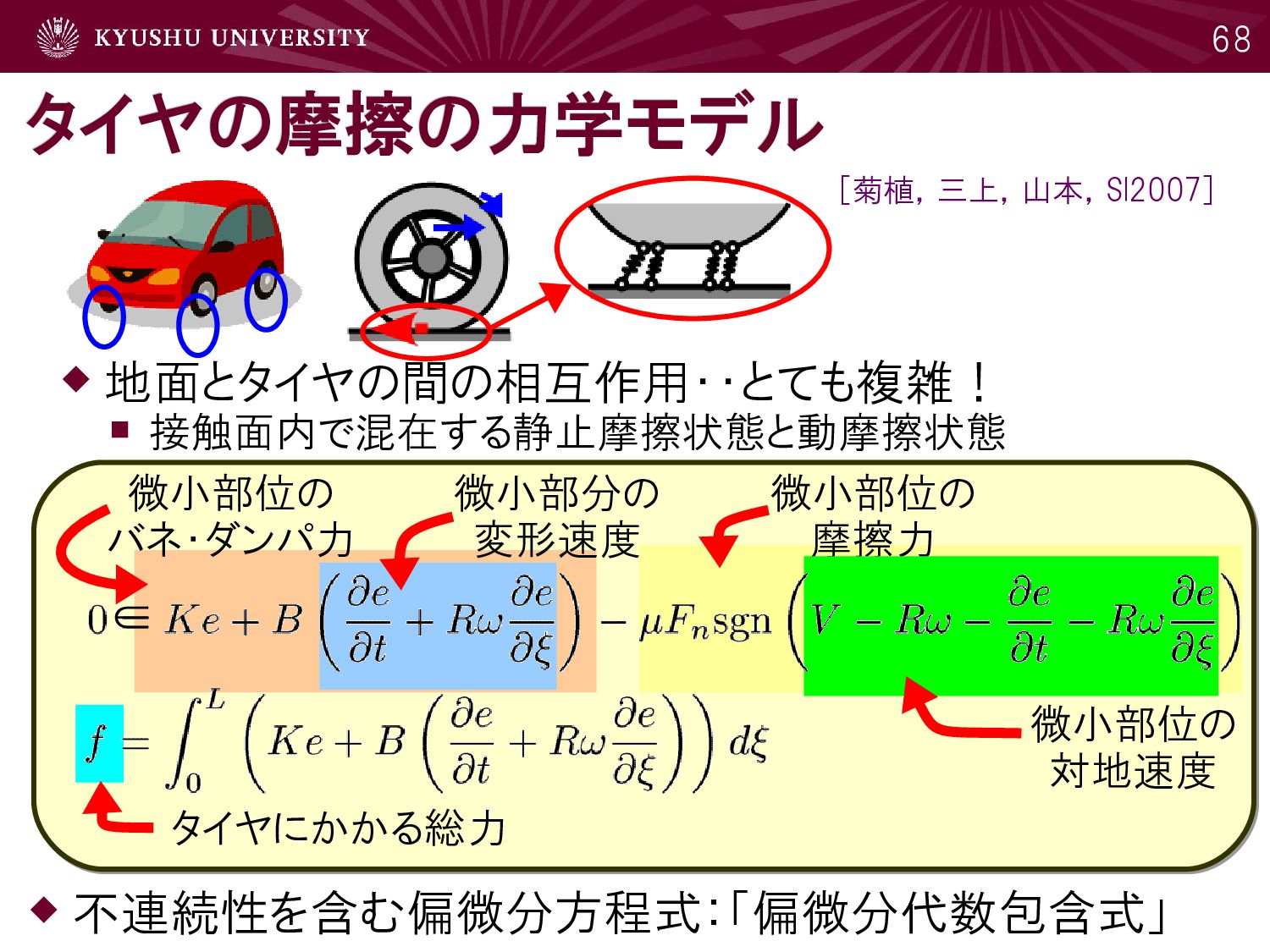
おまけ:より現実に近い挙動を目指した シミュレーション研究 シミュレーション研究 X. Xiong et al.:“A Differential-Algebraic Multistate Friction Model,” Proc. SIMPAR, Springer, pp.77-88, 2012. X. Xiong et al.:“A Differential-Algebraic Contact Model with Nonlinear Compliance,” Proc. DSCC, Paper 8642, 2012 R. Kikuuwe et al.:“Admittance and Impedance Representations of Friction Based on Implicit Euler Integration,” IEEE Trans. Rob., 22(6), pp.1176-1188, 2006.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![35 辺の対 辺(バネ) 競合する論文: 競合する論文: [Delingette, ISBMS'08] [Delingette, ISBMS'08] ](https://files.speakerdeck.com/presentations/88cb5c8769134e1d9a95b58a9a71a3d1/slide_33.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![53 解決法:最小残差スムージング( 解決法:最小残差スムージング(MRS MRS) ) 初期値 [Zhou&Walker, 1994] 繰り返し計算 解](https://files.speakerdeck.com/presentations/88cb5c8769134e1d9a95b58a9a71a3d1/slide_50.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![72 [1] シミュレーション研究に対する私のスタンス [2] 超弾性体の実時間シミュレーションについて [3] 構成則計算の高速化 [4] 時間積分の安定化とArtifactの除去 [5]](https://files.speakerdeck.com/presentations/88cb5c8769134e1d9a95b58a9a71a3d1/slide_68.jpg){kind=link}