Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
26_0423 ロボットの力制御:論点と要件の整理
Search
Ryo Kikuuwe
April 25, 2026
Technology
89
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
26_0423 ロボットの力制御:論点と要件の整理
ロボット革命・産業IoTイニシアティブ協議会(RRI)・ロボット利活用推進WG(WG2)・ニーズシーズ課題整理SWG公開シンポジウムにおける講演
Ryo Kikuuwe
April 25, 2026
More Decks by Ryo Kikuuwe
See All by Ryo Kikuuwe
26_0616 ロボットの力制御:要件の整理
kikuuwe
0
28
23_1211 Nonsmooth Modeling of Hydraulic Systems and Its Application to Control of Hydraulic Excavators
kikuuwe
0
310
22_0910 非平滑力学へのお誘い
kikuuwe
0
1.7k
22_0905 可逆駆動性の低い歯車減速機の運動方程式表現
kikuuwe
0
1.6k
20_1025 Torque-Bounded Admittance Control Realized by a Set-valued Algebraic Feedback
kikuuwe
0
460
19_1216 Differential-Algebraic Relaxation and Set-Valued Algebraic Loop for Realization of Sliding Mode Systems
kikuuwe
0
270
19_0906 A First-Order Differentiator with First-Order Sliding Mode Filtering
kikuuwe
0
370
19_0530 非圧縮流体仮定にもとづく油圧シリンダの準静的モデル
kikuuwe
0
880
18_0711 Anti-Noise and Anti-Disturbance Properties of Differential-Algebraic Relaxation Applied to a Set-Valued Controller
kikuuwe
0
310
Other Decks in Technology
See All in Technology
LLMやAIエージェントをソフトウェアに組み込むプラクティス
shibuiwilliam
2
420
「ちゃんとやっている」は独りよがりだった ― 不安に寄り添うインシデント対応へ / Towards incident response that addresses anxieties
chmikata
1
5.9k
Genie Ontologyは銀の弾丸かを考える / Is Genie Ontology a Silver Bullet?
nttcom
0
390
誤解だらけの開発生産性 / Myths and Misconceptions about Developer Productivity
i35_267
2
790
SREとQA 二人三脚で進めるSLO運用/sre-qa-slo
sugitak
0
830
AI、CDK と協働する Full TypeScript アプリケーション開発 / Full TypeScript Application with AI and CDK
geekplus_tech
2
370
大量データに対しても、生成AIを用いてリーズナブルにデータ加工をしたい!Databricksのai_queryについて調べてみた
kamoshika
1
220
AmplifyHostingConstructからSSRフレームワークのためのホスティング設計を考察する/amplify-hosting-construct
fossamagna
1
220
CIで使うClaude
iwatatomoya
0
290
AI時代の闇と光
tatsuya1970
0
110
AI Driven AI Governance
pict3
0
480
非定型なドキュメントを効率よくリファクタする 〜えぇ!?仕様書27本の移行が1日で終わったって!?〜
subroh0508
2
550
Featured
See All Featured
Music & Morning Musume
bryan
47
7.3k
Highjacked: Video Game Concept Design
rkendrick25
PRO
1
410
Are puppies a ranking factor?
jonoalderson
1
3.7k
Being A Developer After 40
akosma
91
590k
Exploring the Power of Turbo Streams & Action Cable | RailsConf2023
kevinliebholz
37
6.5k
How Software Deployment tools have changed in the past 20 years
geshan
0
34k
How People are Using Generative and Agentic AI to Supercharge Their Products, Projects, Services and Value Streams Today
helenjbeal
1
240
More Than Pixels: Becoming A User Experience Designer
marktimemedia
3
460
Writing Fast Ruby
sferik
630
63k
Skip the Path - Find Your Career Trail
mkilby
1
170
GraphQLの誤解/rethinking-graphql
sonatard
75
12k
Primal Persuasion: How to Engage the Brain for Learning That Lasts
tmiket
0
390
Transcript
1 2026/04/23 ロボットの力制御 : 論点と要件の整理 ロボットの力制御 : 論点と要件の整理 広島大学 先進理工系科学研究科
機械力学研究室 菊植 亮 https://home.hiroshima-u.ac.jp/kikuuwe/ https://www.youtube.com/kikuuwe/ https://speakerdeck.com/kikuuwe/ Ryo Kikuuwe 2026/04/23
4 2026/04/23 本日の内容 本日の内容 [1] 力制御とは? [2] 菊植の研究について
[3] 力制御には何が必要か
5 2026/04/23 [1] [1] 力制御とは? 力制御とは? [1] [1] 力制御とは? 力制御とは?
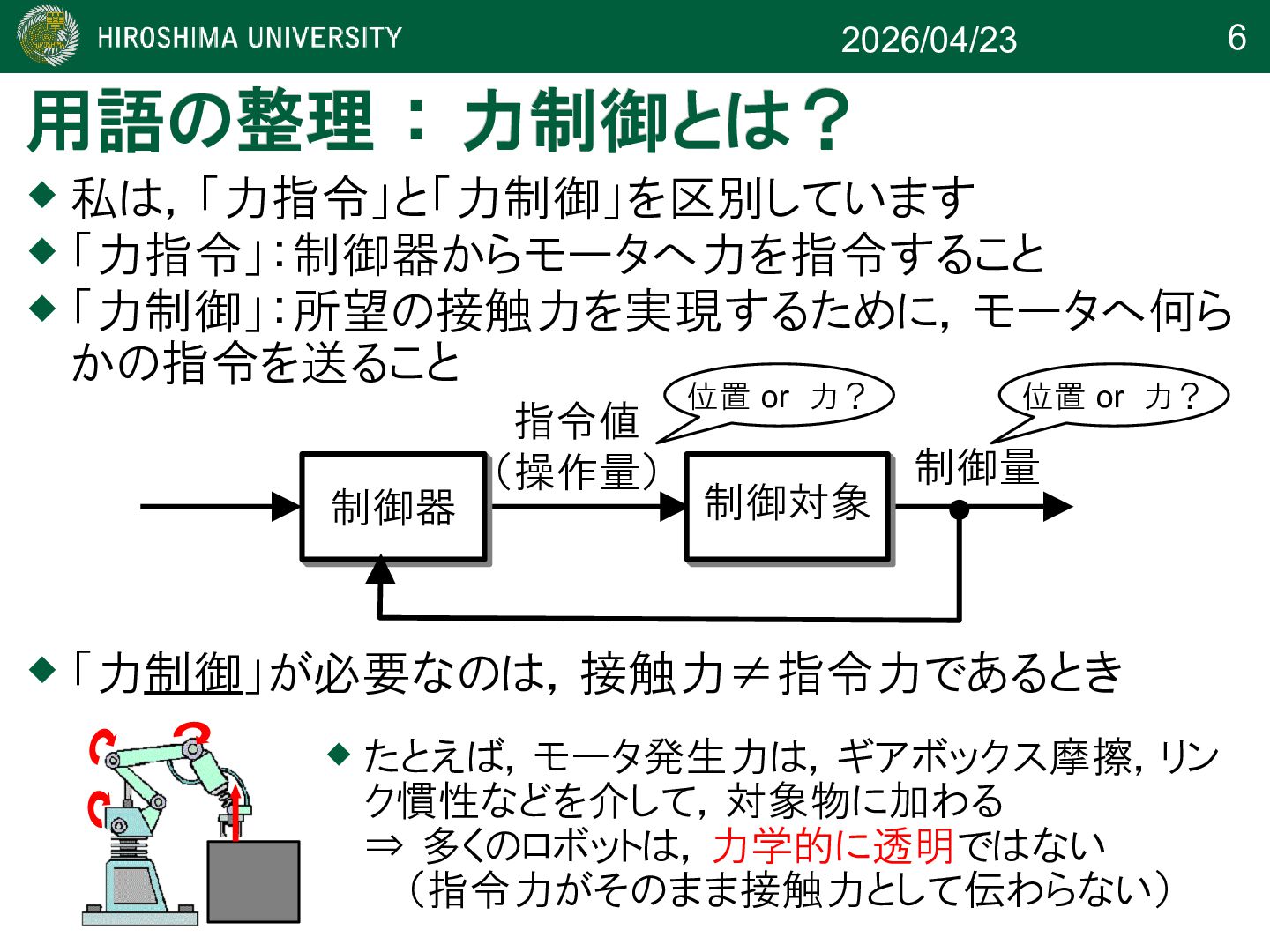
6 2026/04/23 用語の整理 : 力制御とは? 用語の整理 : 力制御とは? 私は,「力指令」と「力制御」を区別しています
「力指令」:制御器からモータへ力を指令すること 「力制御」:所望の接触力を実現するために,モータへ何ら かの指令を送ること 指令値 (操作量) 制御量 制御対象 制御器 位置 or 力? 位置 or 力? 「力制御」が必要なのは,接触力≠指令力であるとき たとえば,モータ発生力は,ギアボックス摩擦,リン ク慣性などを介して,対象物に加わる ⇒ 多くのロボットは,力学的に透明ではない (指令力がそのまま接触力として伝わらない)
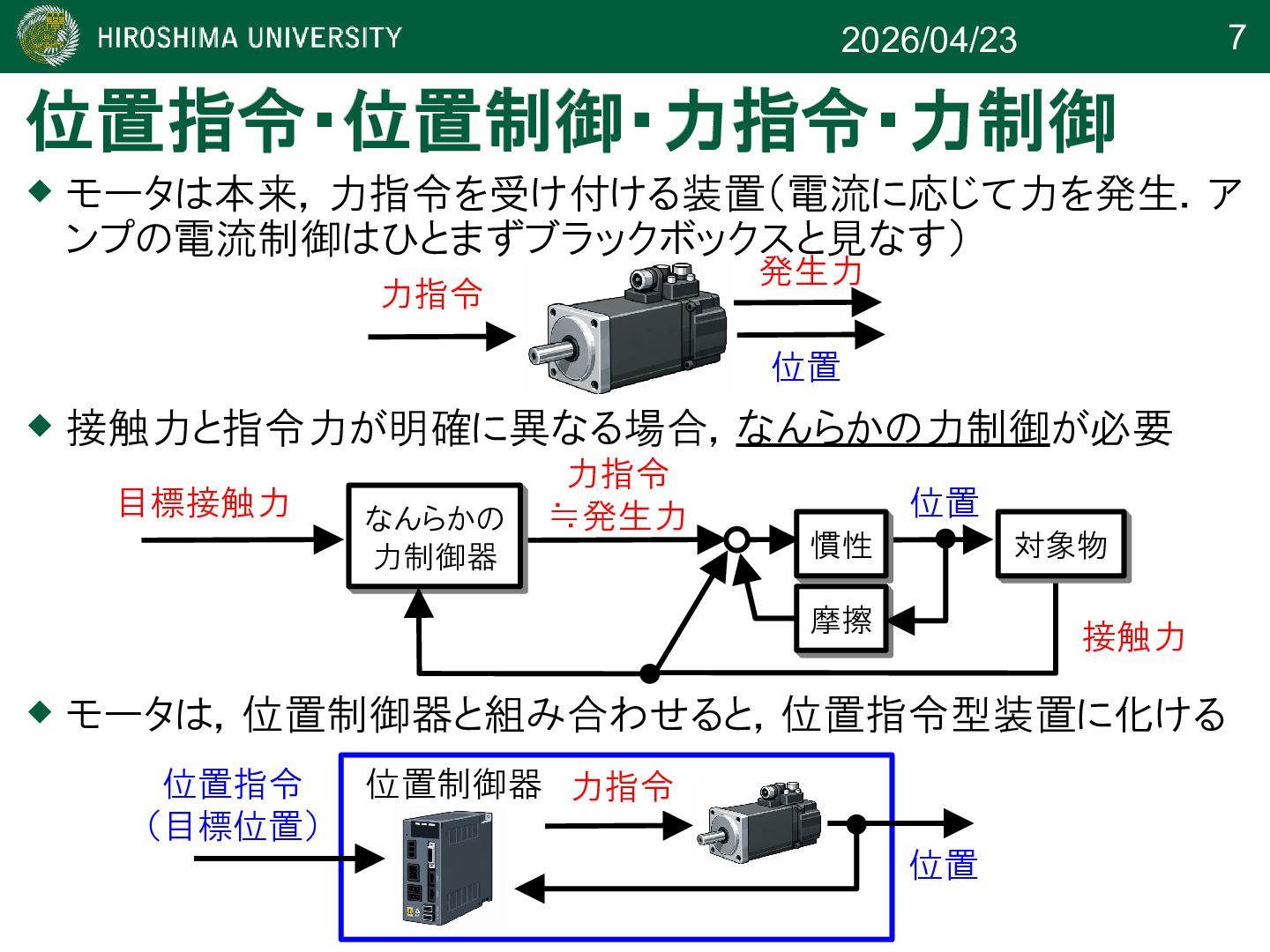
7 2026/04/23 位置指令・位置制御・力指令・力制御 位置指令・位置制御・力指令・力制御 モータは本来,力指令を受け付ける装置(電流に応じて力を発生.ア ンプの電流制御はひとまずブラックボックスと見なす) 位置制御器 位置 力指令
位置指令 (目標位置) 力指令 発生力 モータは,位置制御器と組み合わせると,位置指令型装置に化ける 力指令 ≒発生力 慣性 慣性 摩擦 摩擦 対象物 対象物 接触力 位置 接触力と指令力が明確に異なる場合,なんらかの力制御が必要 位置 目標接触力 なんらかの 力制御器 なんらかの 力制御器
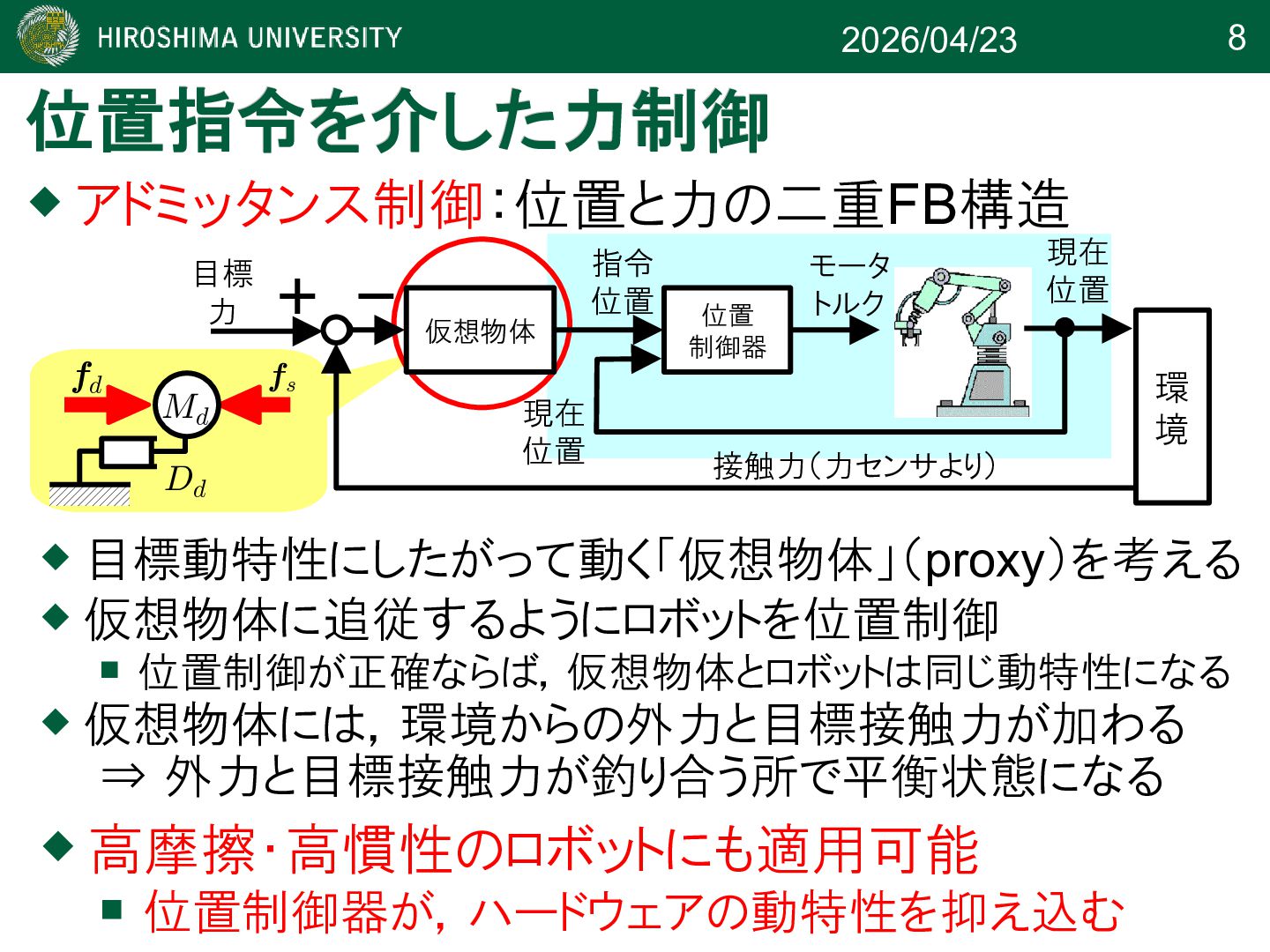
8 2026/04/23 位置指令を介した力制御 位置指令を介した力制御 アドミッタンス制御:位置と力の二重FB構造 fd fs Md Dd
目標 力 現在 位置 接触力(力センサより) 環 境 指令 位置 位置 制御器 モータ トルク 仮想物体 現在 位置 目標動特性にしたがって動く「仮想物体」(proxy)を考える 仮想物体に追従するようにロボットを位置制御 位置制御が正確ならば,仮想物体とロボットは同じ動特性になる 仮想物体には,環境からの外力と目標接触力が加わる ⇒ 外力と目標接触力が釣り合う所で平衡状態になる 高摩擦・高慣性のロボットにも適用可能 位置制御器が,ハードウェアの動特性を抑え込む
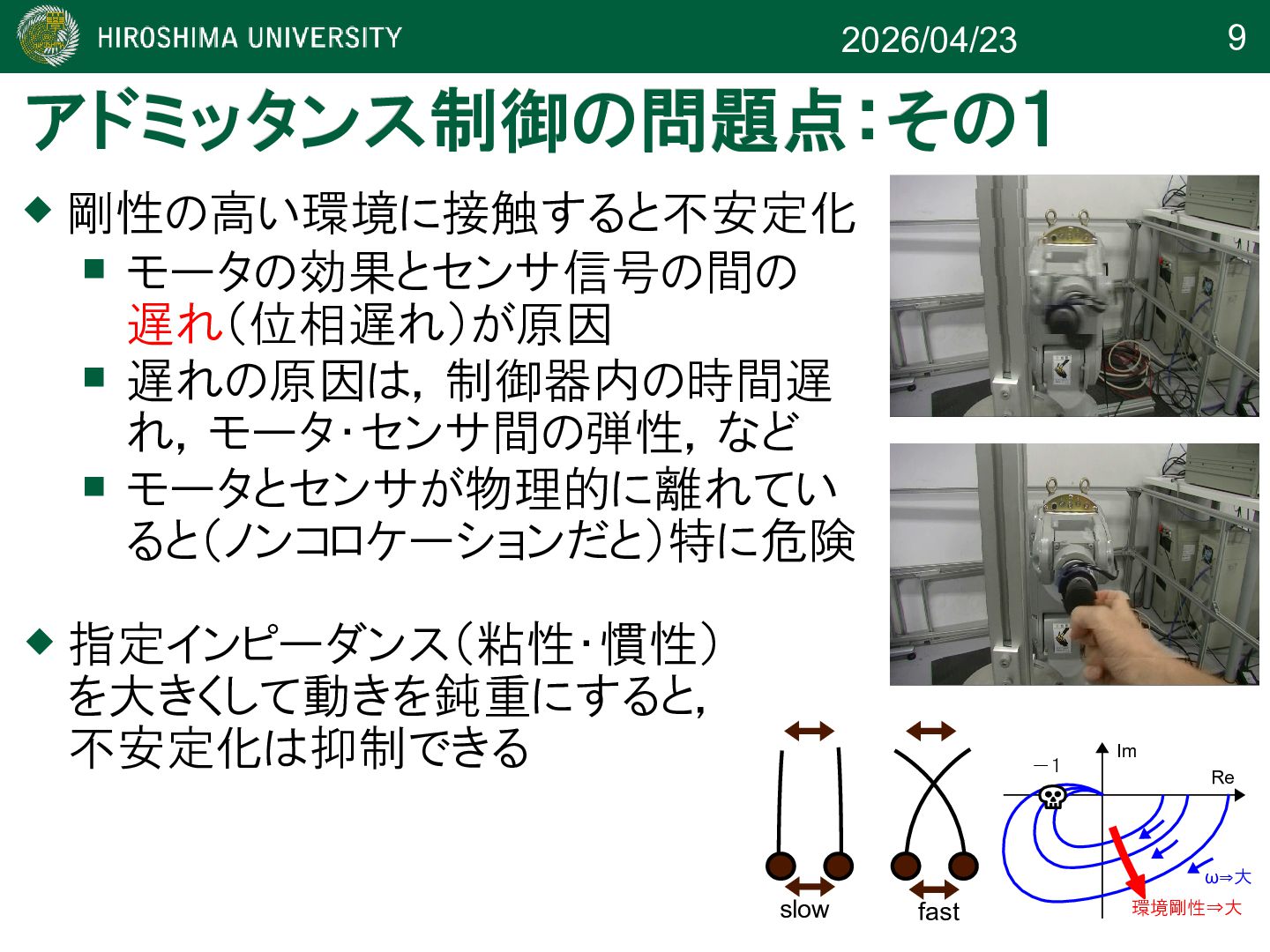
9 2026/04/23 アドミッタンス制御の問題点:その1 アドミッタンス制御の問題点:その1 剛性の高い環境に接触すると不安定化 モータの効果とセンサ信号の間の 遅れ(位相遅れ)が原因
遅れの原因は,制御器内の時間遅 れ,モータ・センサ間の弾性,など モータとセンサが物理的に離れてい ると(ノンコロケーションだと)特に危険 slow fast -1 Re Im 環境剛性⇒大 ω⇒大 指定インピーダンス(粘性・慣性) を大きくして動きを鈍重にすると, 不安定化は抑制できる
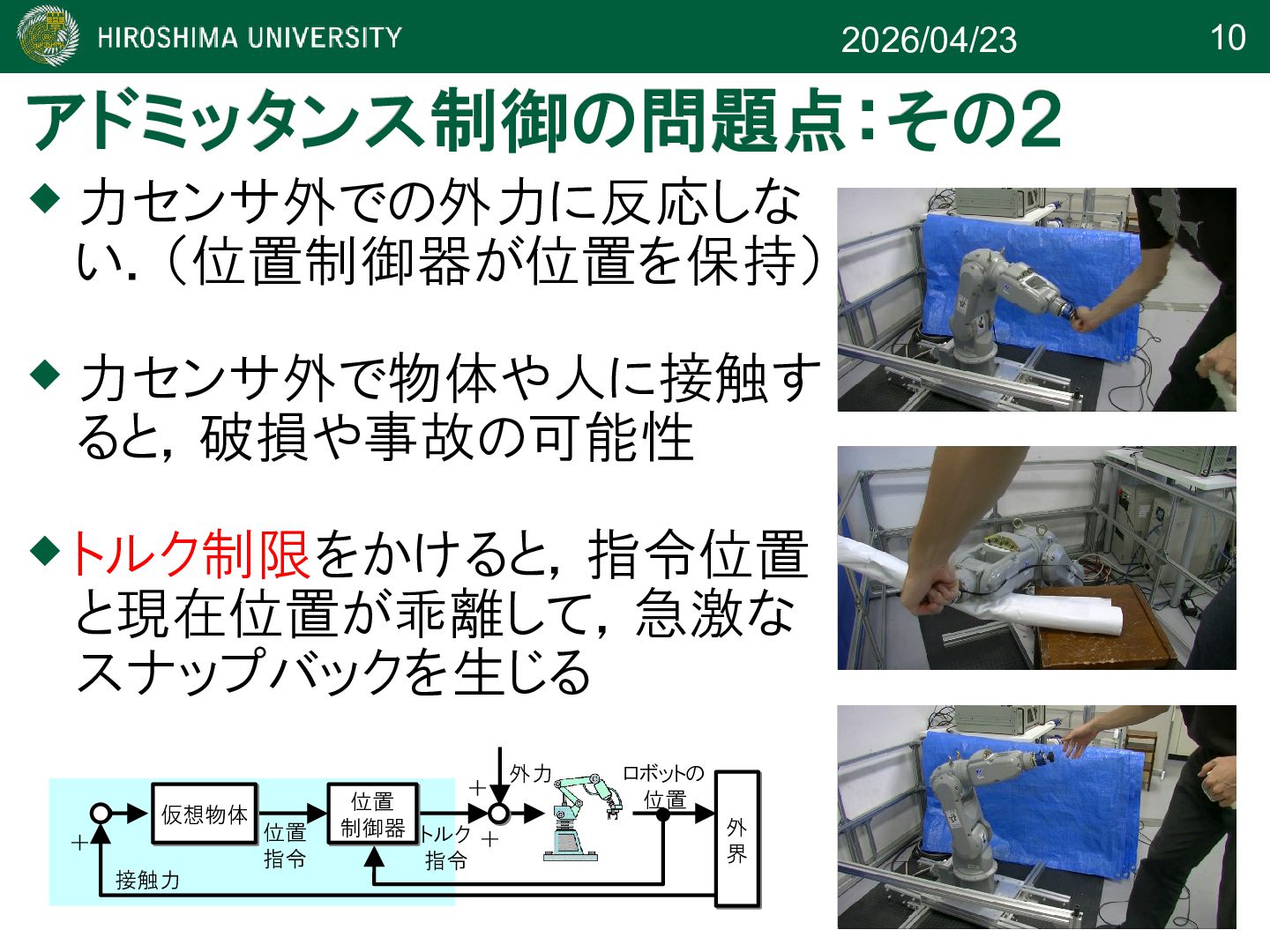
10 2026/04/23 アドミッタンス制御の問題点:その2 アドミッタンス制御の問題点:その2 力センサ外での外力に反応しな い.(位置制御器が位置を保持) 力センサ外で物体や人に接触す ると,破損や事故の可能性
トルク制限をかけると,指令位置 と現在位置が乖離して,急激な スナップバックを生じる 外 界 外 界 ロボットの 位置 接触力 位置 指令 位置 制御器 位置 制御器 トルク 指令 仮想物体 仮想物体 外力 + + +
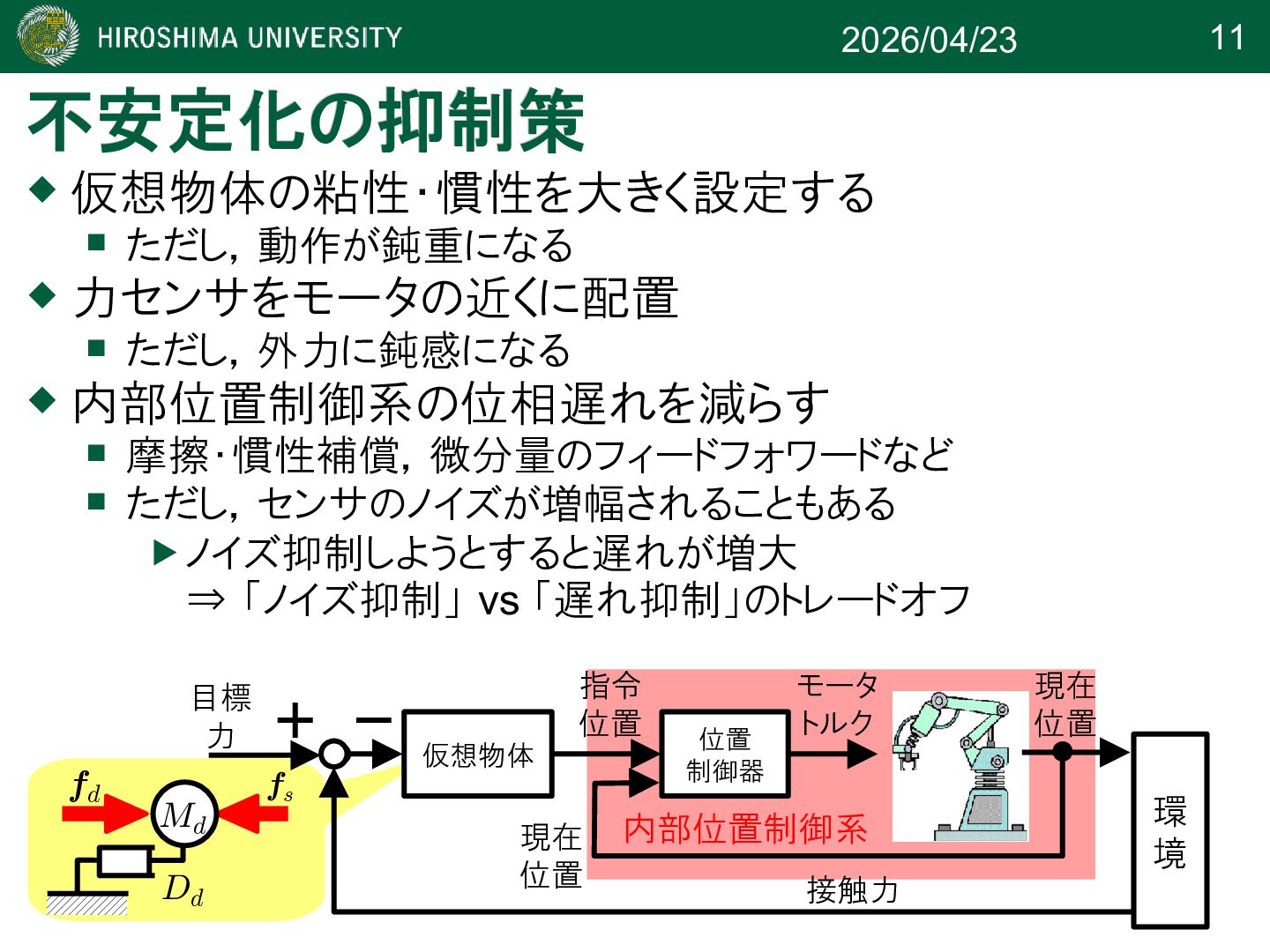
11 2026/04/23 不安定化の抑制策 不安定化の抑制策 仮想物体の粘性・慣性を大きく設定する ただし,動作が鈍重になる 力センサをモータの近くに配置
ただし,外力に鈍感になる 内部位置制御系の位相遅れを減らす 摩擦・慣性補償,微分量のフィードフォワードなど ただし,センサのノイズが増幅されることもある ノイズ抑制しようとすると遅れが増大 ⇒ 「ノイズ抑制」 vs 「遅れ抑制」のトレードオフ 内部位置制御系 fd fs Md Dd 目標 力 現在 位置 接触力 環 境 指令 位置 位置 制御器 モータ トルク 仮想物体 現在 位置
12 2026/04/23 [2] [2] 菊植の研究について 菊植の研究について [2] [2] 菊植の研究について 菊植の研究について
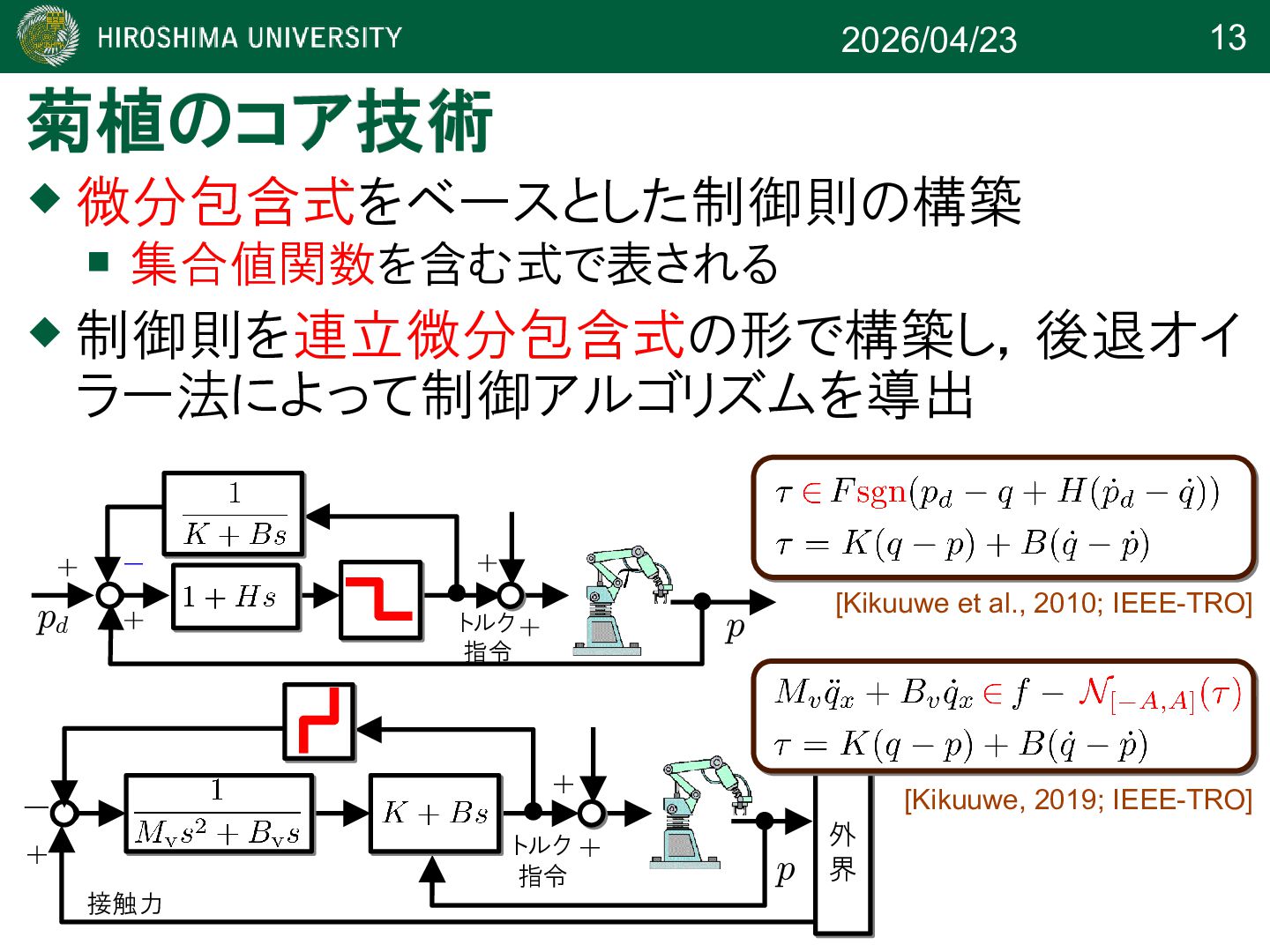
13 2026/04/23 菊植のコア技術 菊植のコア技術 微分包含式をベースとした制御則の構築 集合値関数を含む式で表される 制御則を連立微分包含式の形で構築し,後退オイ
ラー法によって制御アルゴリズムを導出 + + p pd + - + トルク 指令 [Kikuuwe et al., 2010; IEEE-TRO] 外 界 外 界 接触力 トルク 指令 + + + - p [Kikuuwe, 2019; IEEE-TRO]
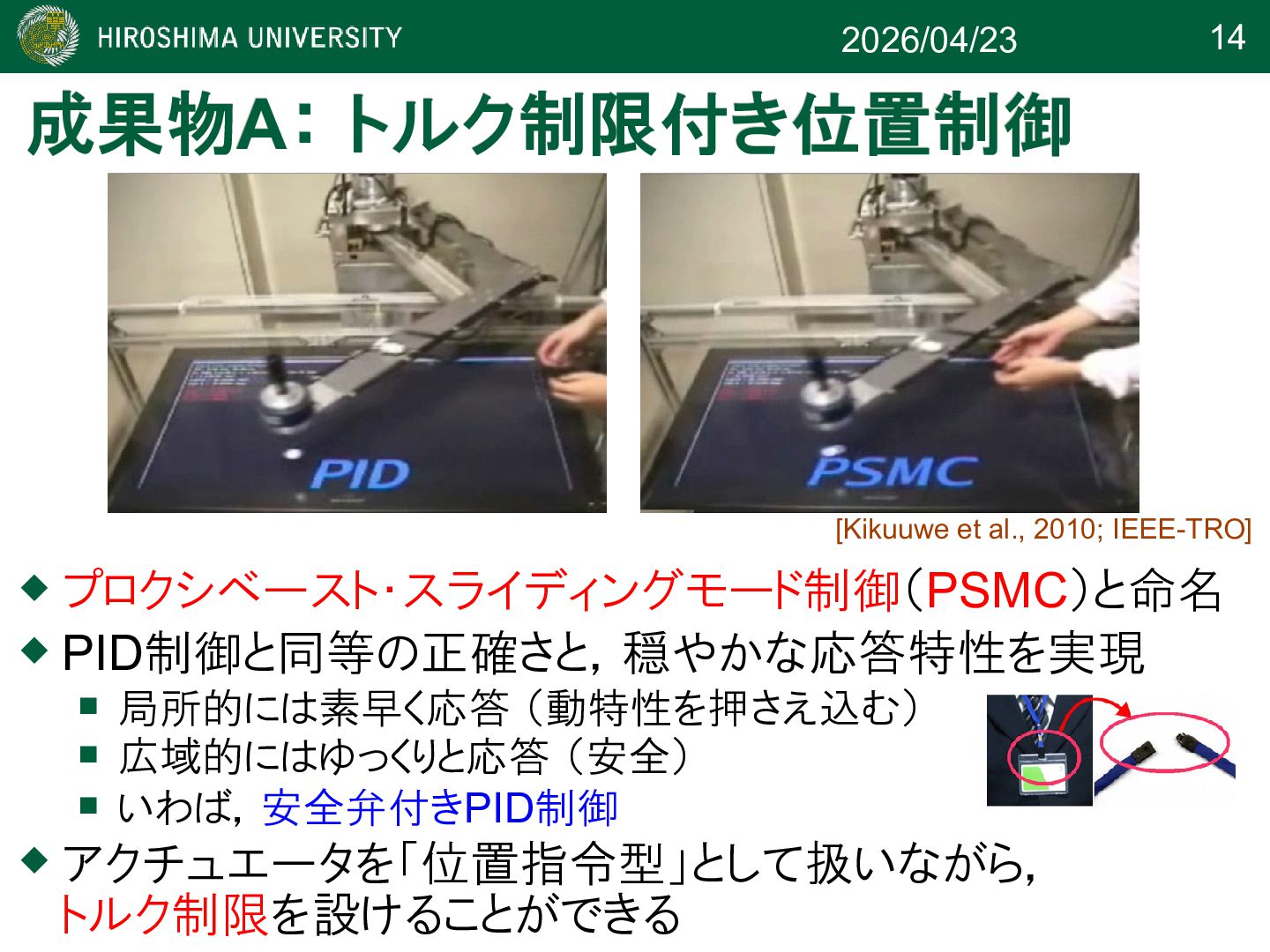
14 2026/04/23 成果物 成果物A A: トルク制限付き位置制御 : トルク制限付き位置制御 プロクシベースト・スライディングモード制御(PSMC)と命名
PID制御と同等の正確さと,穏やかな応答特性を実現 局所的には素早く応答 (動特性を押さえ込む) 広域的にはゆっくりと応答 (安全) いわば,安全弁付きPID制御 アクチュエータを「位置指令型」として扱いながら, トルク制限を設けることができる [Kikuuwe et al., 2010; IEEE-TRO]
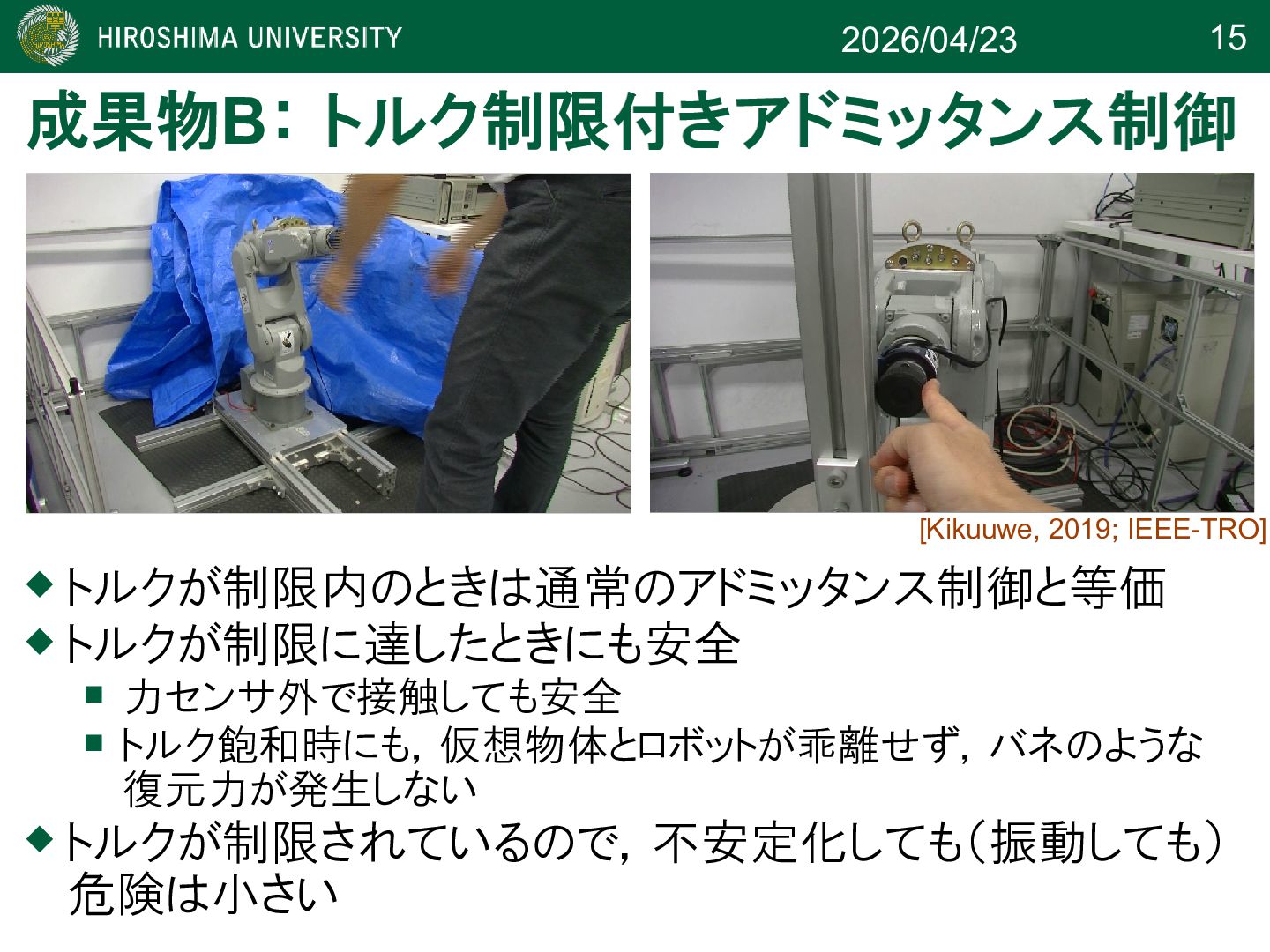
15 2026/04/23 成果物 成果物B B: トルク制限付きアドミッタンス制御 : トルク制限付きアドミッタンス制御 トルクが制限内のときは通常のアドミッタンス制御と等価
トルクが制限に達したときにも安全 力センサ外で接触しても安全 トルク飽和時にも,仮想物体とロボットが乖離せず,バネのような 復元力が発生しない トルクが制限されているので,不安定化しても(振動しても) 危険は小さい [Kikuuwe, 2019; IEEE-TRO]
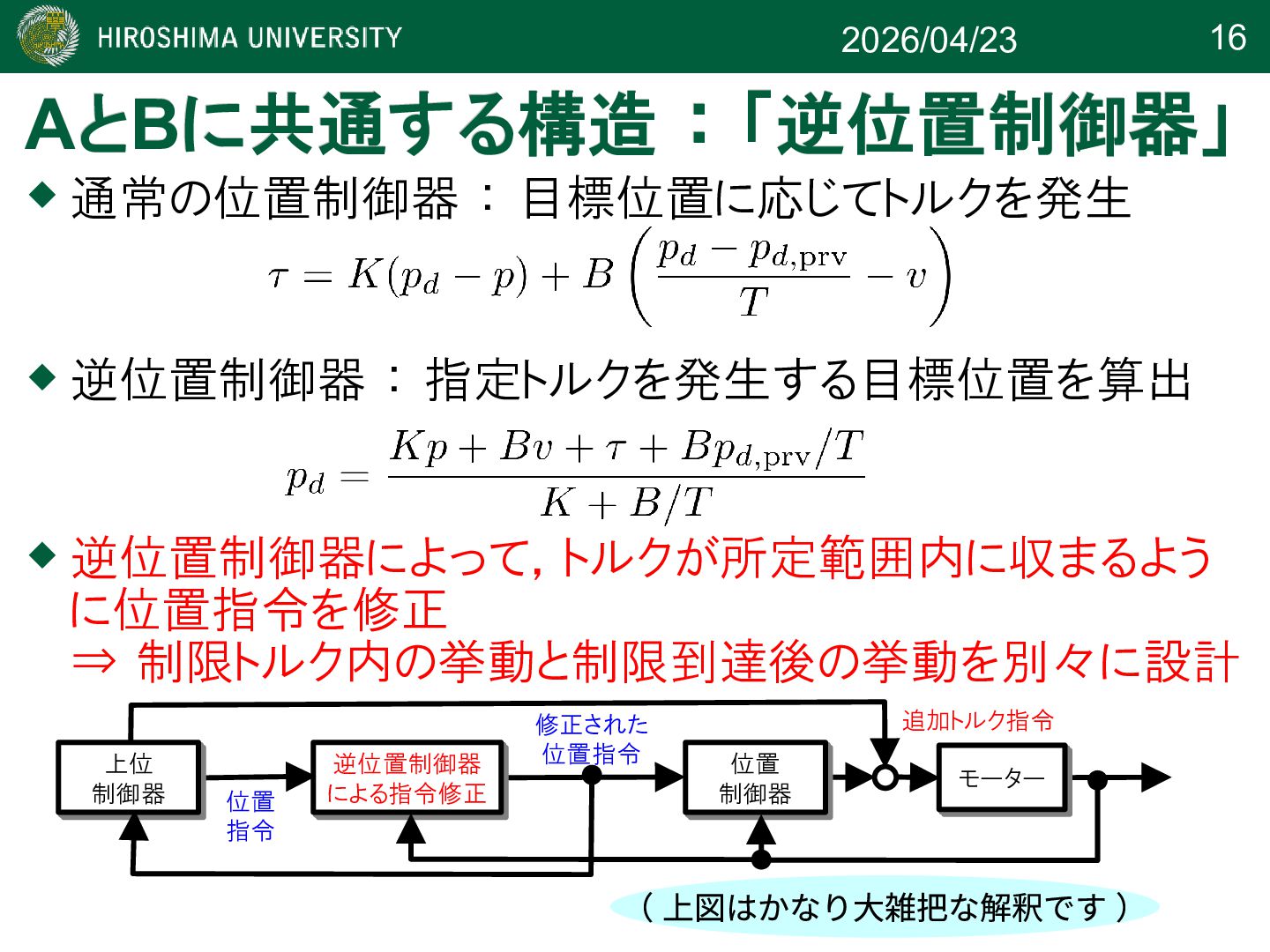
16 2026/04/23 A Aと とB Bに共通する構造 : 「逆位置制御器」 に共通する構造 :
「逆位置制御器」 通常の位置制御器 : 目標位置に応じてトルクを発生 逆位置制御器 : 指定トルクを発生する目標位置を算出 逆位置制御器によって,トルクが所定範囲内に収まるよう に位置指令を修正 ⇒ 制限トルク内の挙動と制限到達後の挙動を別々に設計 追加トルク指令 位置 制御器 位置 制御器 モーター モーター 修正された 位置指令 逆位置制御器 による指令修正 逆位置制御器 による指令修正 位置 指令 上位 制御器 上位 制御器 (上図はかなり大雑把な解釈です)
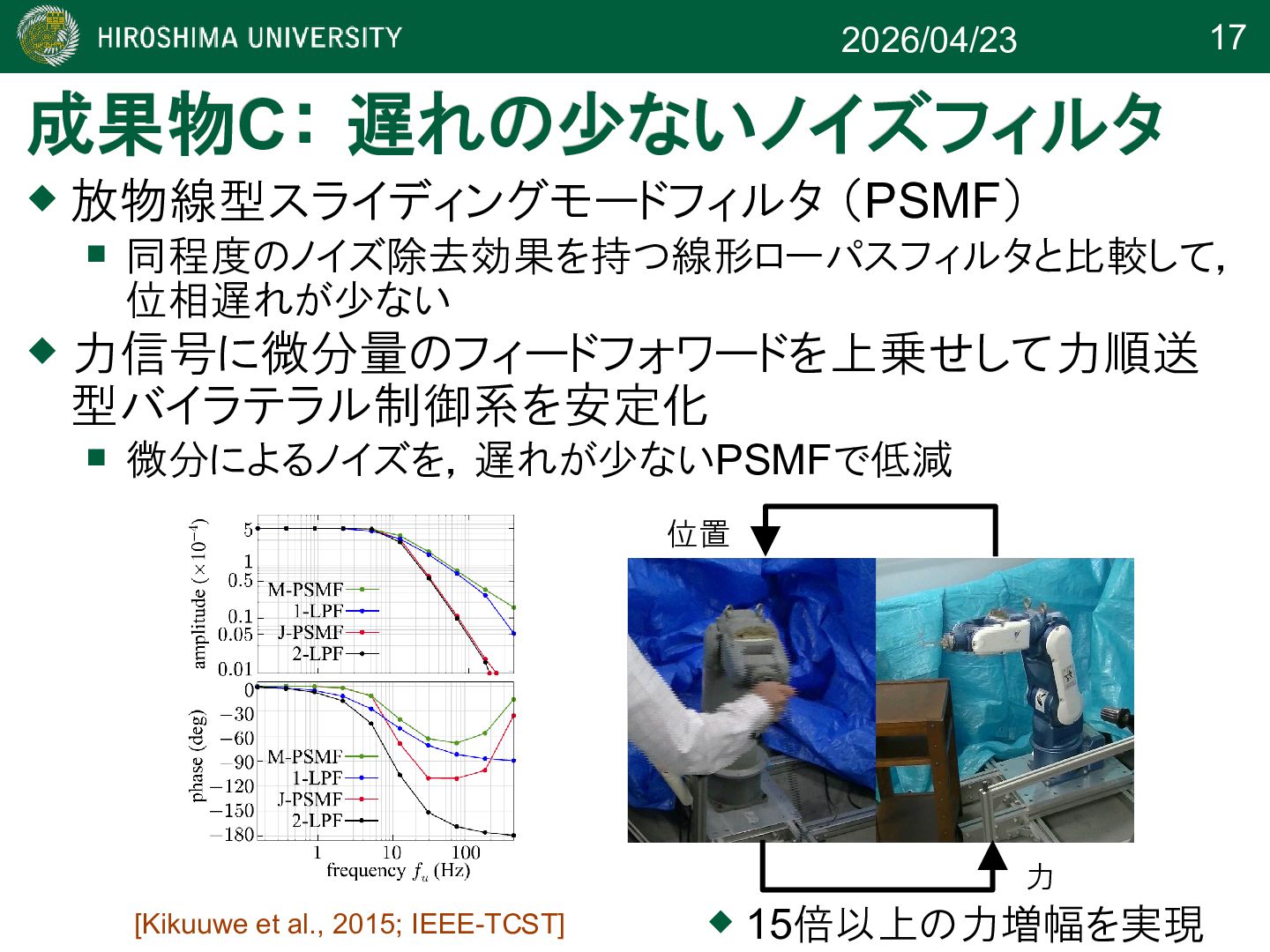
17 2026/04/23 成果物 成果物C C: 遅れの少ないノイズフィルタ : 遅れの少ないノイズフィルタ 放物線型スライディングモードフィルタ
(PSMF) 同程度のノイズ除去効果を持つ線形ローパスフィルタと比較して, 位相遅れが少ない 力信号に微分量のフィードフォワードを上乗せして力順送 型バイラテラル制御系を安定化 微分によるノイズを,遅れが少ないPSMFで低減 [Kikuuwe et al., 2015; IEEE-TCST] 力 15倍以上の力増幅を実現 位置
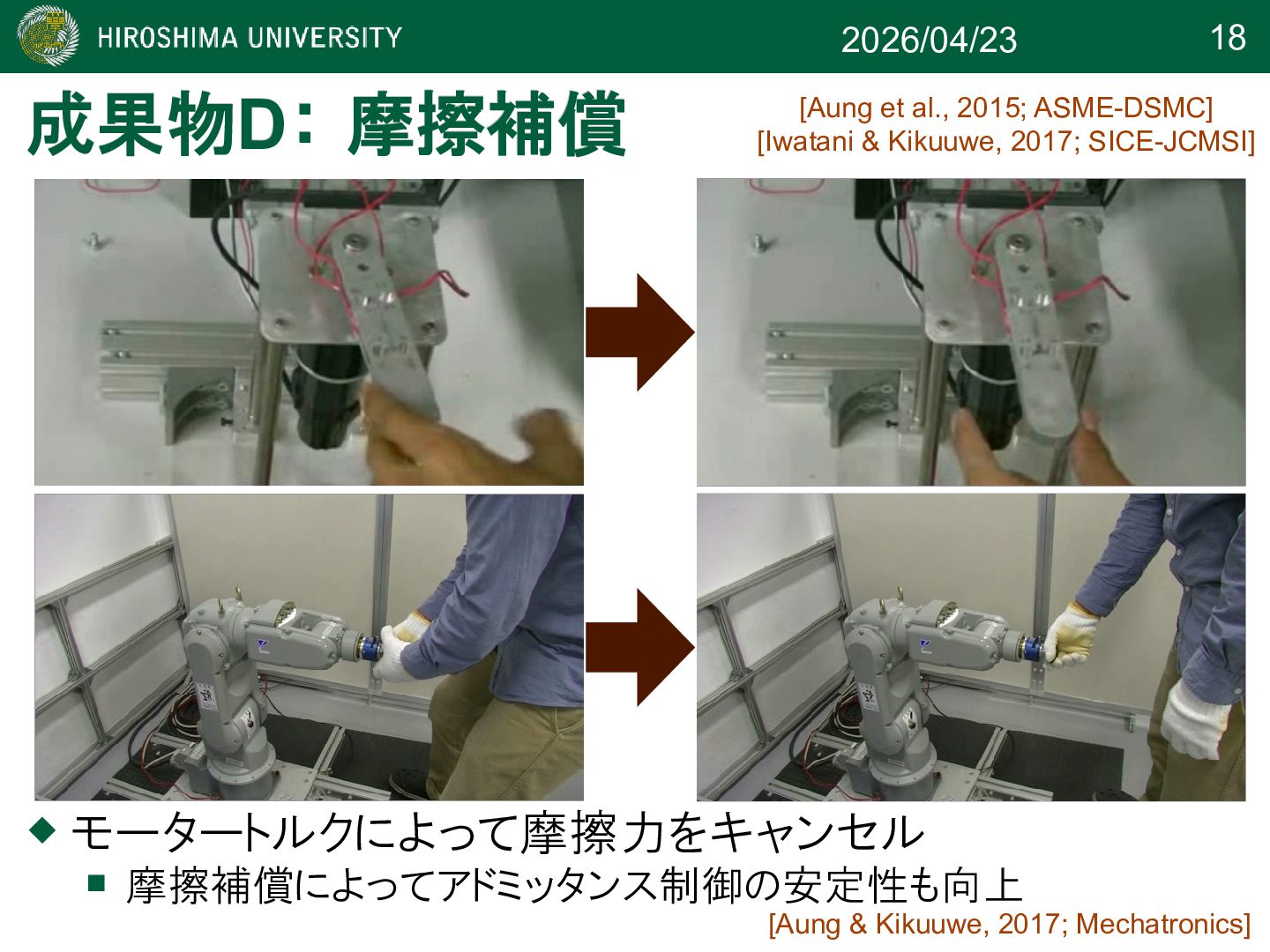
18 2026/04/23 成果物 成果物D D: 摩擦補償 : 摩擦補償 [Aung et
al., 2015; ASME-DSMC] [Iwatani & Kikuuwe, 2017; SICE-JCMSI] モータートルクによって摩擦力をキャンセル 摩擦補償によってアドミッタンス制御の安定性も向上 [Aung & Kikuuwe, 2017; Mechatronics]
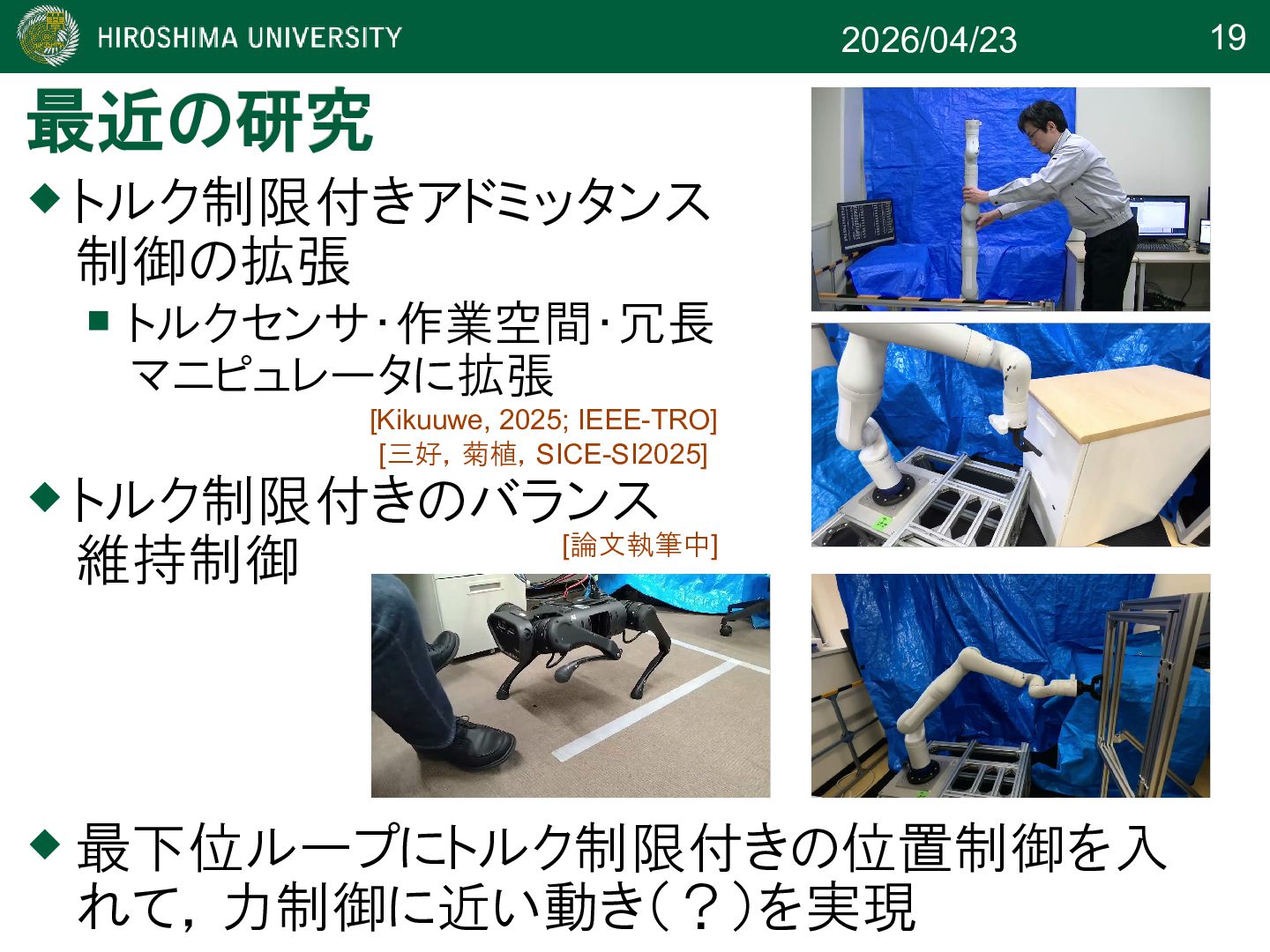
19 2026/04/23 トルク制限付きのバランス 維持制御 最近の研究 最近の研究 トルク制限付きアドミッタンス 制御の拡張
トルクセンサ・作業空間・冗長 マニピュレータに拡張 [Kikuuwe, 2025; IEEE-TRO] [三好,菊植,SICE-SI2025] [論文執筆中] 最下位ループにトルク制限付きの位置制御を入 れて,力制御に近い動き(?)を実現
20 2026/04/23 [3] [3] 力制御には何が必要か 力制御には何が必要か [3] [3] 力制御には何が必要か 力制御には何が必要か
21 2026/04/23 力制御に必要なハードウェア要件 力制御に必要なハードウェア要件 力指令(単ループ)に徹することが可能なら(力制御(二重 ループ)が避けられるなら),それがベスト 低摩擦・低慣性のモータ(QDDなど)を用いる
どの程度の摩擦・慣性が許容されるかは用途による 力制御は不安定化との戦い 力制御は不安定化との戦い 力制御(アドミッタンス制御)を使わざるをえない場合 1kHz以上のトルク指令が望ましい 力センサとモータはできるだけ近づける 力センサとモータの間の機構はできるだけ固く エンコーダの分解能はできるだけ高く 出力軸側エンコーダは分解能が低くなりがち 内部位置制御はできるだけ高ゲインに
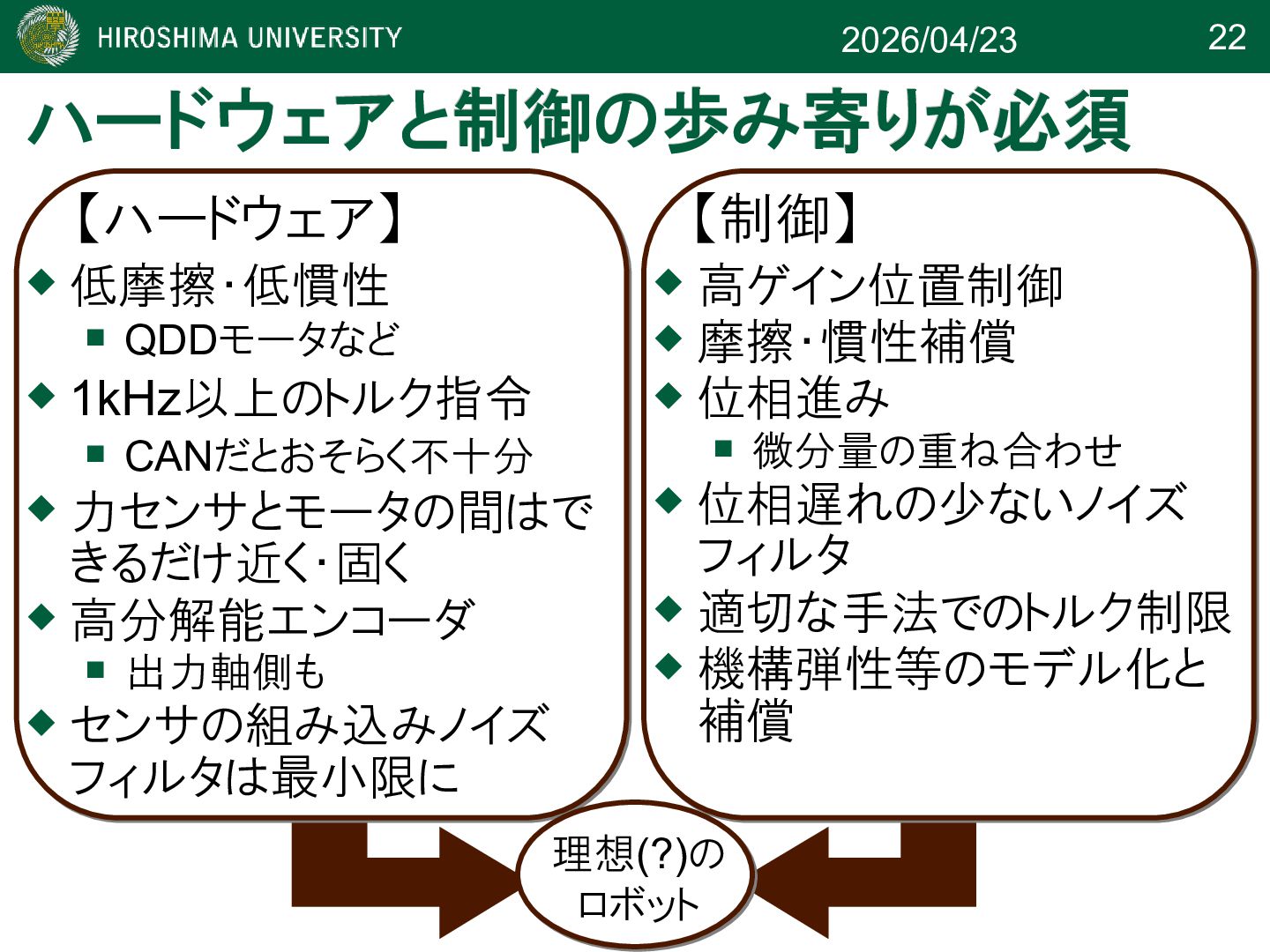
22 2026/04/23 ハードウェアと制御の歩み寄りが必須 ハードウェアと制御の歩み寄りが必須 低摩擦・低慣性 QDDモータなど 1kHz以上のトルク指令
CANだとおそらく不十分 力センサとモータの間はで きるだけ近く・固く 高分解能エンコーダ 出力軸側も センサの組み込みノイズ フィルタは最小限に 高ゲイン位置制御 摩擦・慣性補償 位相進み 微分量の重ね合わせ 位相遅れの少ないノイズ フィルタ 適切な手法でのトルク制限 機構弾性等のモデル化と 補償 理想(?)の ロボット 【ハードウェア】 【制御】
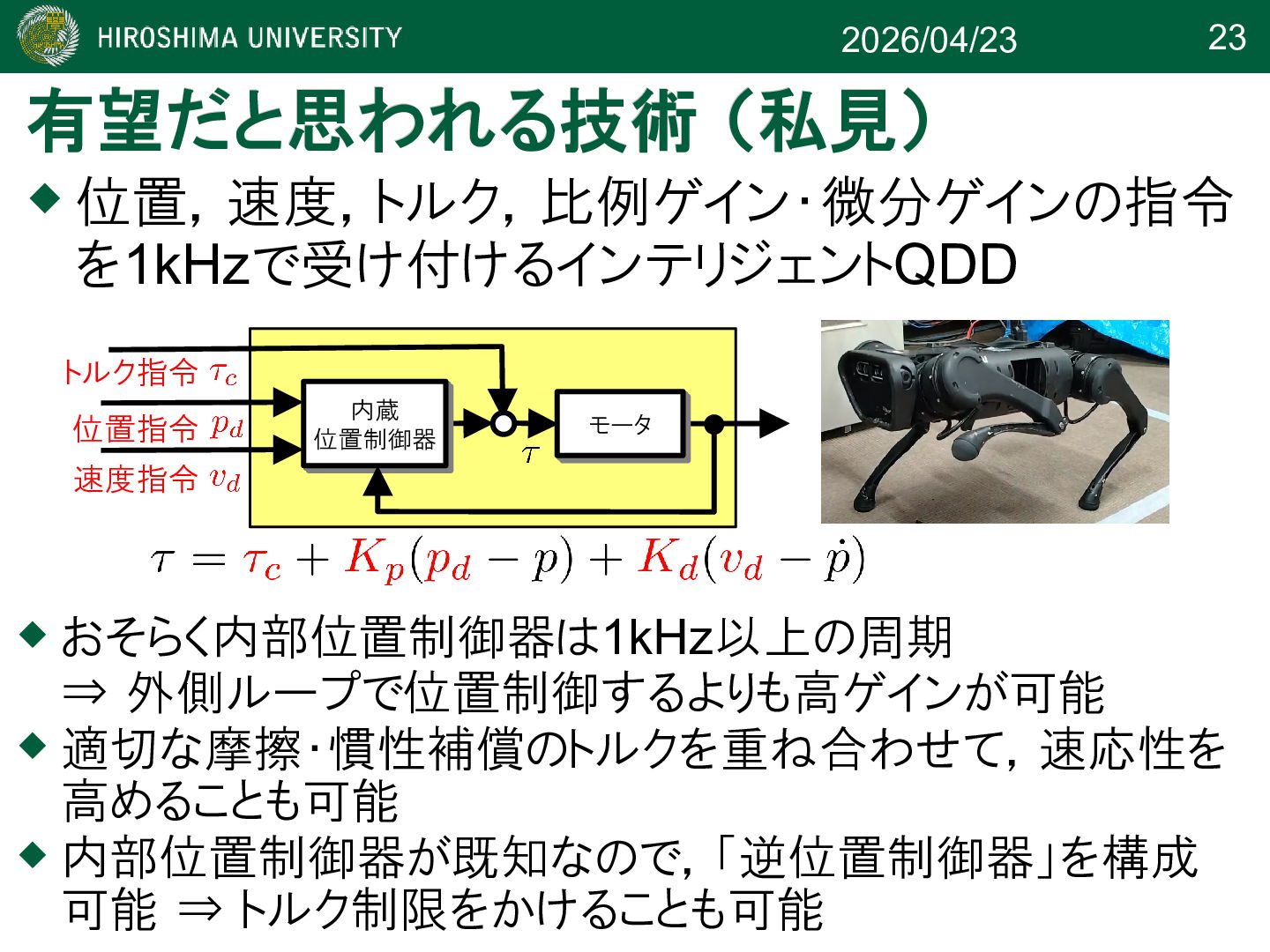
23 2026/04/23 有望だと思われる技術 (私見) 有望だと思われる技術 (私見) 位置,速度,トルク,比例ゲイン・微分ゲインの指令 を1kHzで受け付けるインテリジェントQDD トルク指令
内蔵 位置制御器 内蔵 位置制御器 モータ モータ 速度指令 おそらく内部位置制御器は1kHz以上の周期 ⇒ 外側ループで位置制御するよりも高ゲインが可能 適切な摩擦・慣性補償のトルクを重ね合わせて,速応性を 高めることも可能 内部位置制御器が既知なので,「逆位置制御器」を構成 可能 ⇒ トルク制限をかけることも可能 位置指令
24 2026/04/23 まとめ まとめ まとめ まとめ
25 2026/04/23 まとめ まとめ [1] 力制御とは 力制御と力指令
位置指令にもとづく力制御:アドミッタンス制御 [2] 菊植の研究 トルク制限付き位置制御とアドミッタンス制御 位相遅れの少ないノイズフィルタ 摩擦補償 [3] 力制御には何が必要か 力指令に近い状況がベスト それが無理なら,ハードウェアの要件に注意が必要 ハードウェアと制御の歩み寄りが必要 位置制御内蔵のトルク指令QDDが有望
{kind=link}
![4 2026/04/23 本日の内容 本日の内容 [1] 力制御とは? [2] 菊植の研究について](https://files.speakerdeck.com/presentations/2afe8f1e53284b2f94d913d753612a08/slide_1.jpg){kind=link}
![5 2026/04/23 [1] [1] 力制御とは? 力制御とは? [1] [1] 力制御とは? 力制御とは?](https://files.speakerdeck.com/presentations/2afe8f1e53284b2f94d913d753612a08/slide_2.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![12 2026/04/23 [2] [2] 菊植の研究について 菊植の研究について [2] [2] 菊植の研究について 菊植の研究について](https://files.speakerdeck.com/presentations/2afe8f1e53284b2f94d913d753612a08/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![20 2026/04/23 [3] [3] 力制御には何が必要か 力制御には何が必要か [3] [3] 力制御には何が必要か 力制御には何が必要か](https://files.speakerdeck.com/presentations/2afe8f1e53284b2f94d913d753612a08/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![25 2026/04/23 まとめ まとめ [1] 力制御とは 力制御と力指令 ](https://files.speakerdeck.com/presentations/2afe8f1e53284b2f94d913d753612a08/slide_22.jpg){kind=link}