Share
ロボット革命・産業IoTイニシアティブ協議会(RRI)・データ活用委員会における講演スライド https://www.jmfrri.gr.jp/library/library-10635/
{kind=link}
{kind=link}
![4 2026/06/16 本日の内容 本日の内容 [1] 力制御/力指令とは? [2] 菊植の研究について](https://files.speakerdeck.com/presentations/86643e84858e45ca99bb7e432774f81d/slide_2.jpg){kind=link}
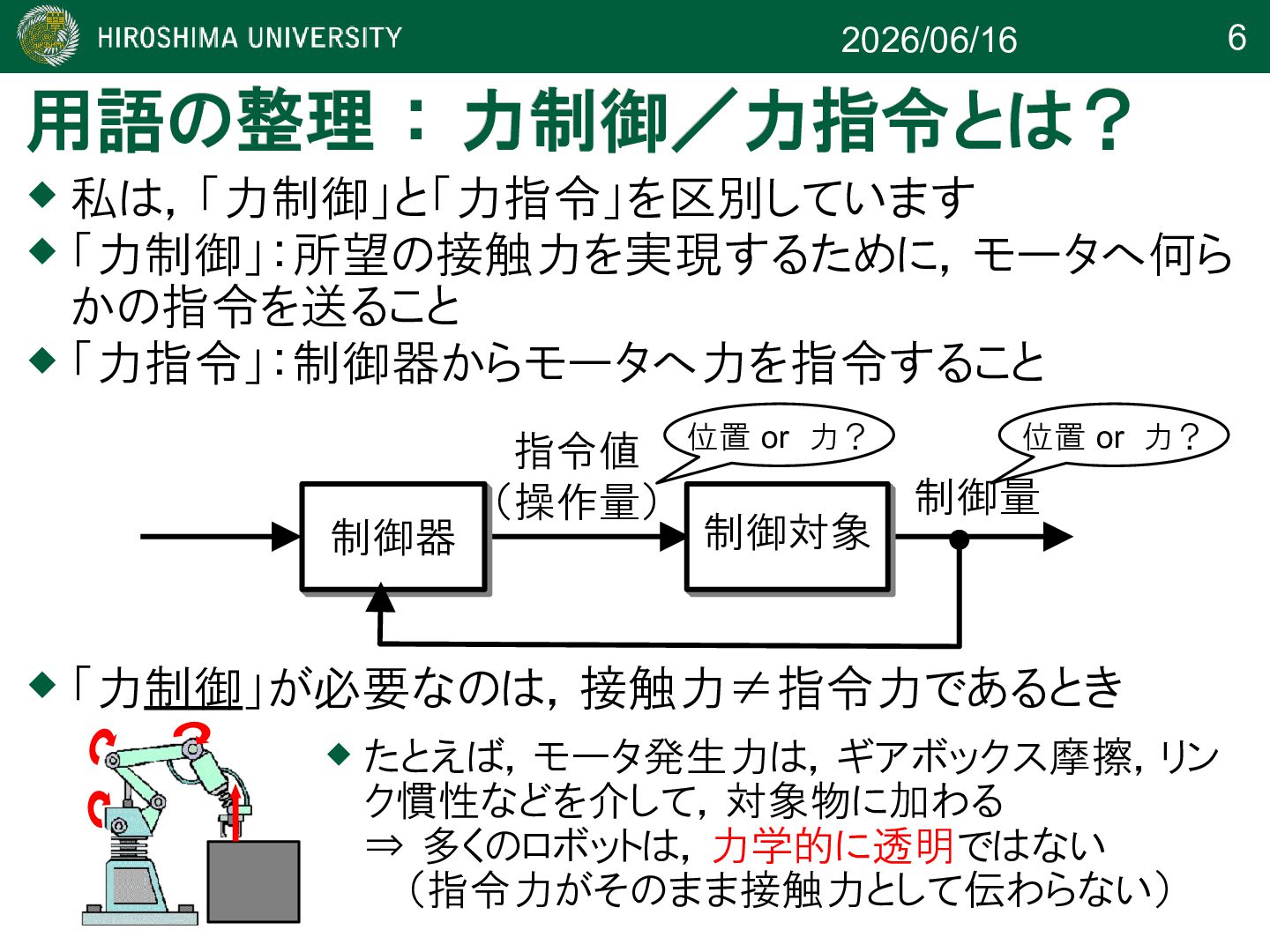
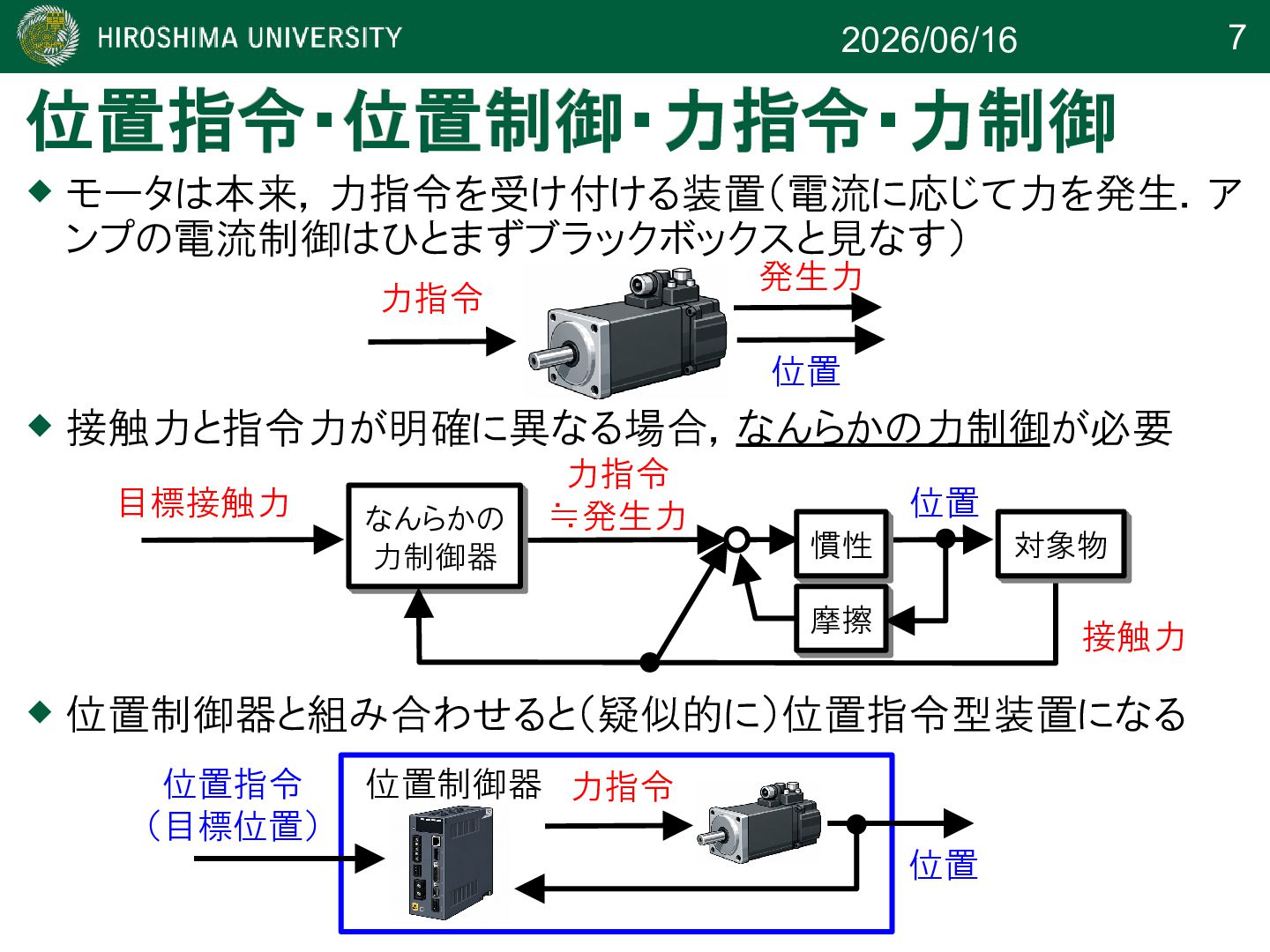
![5 2026/06/16 [1] [1] 力制御/力指令とは? 力制御/力指令とは? [1] [1] 力制御/力指令とは? 力制御/力指令とは?](https://files.speakerdeck.com/presentations/86643e84858e45ca99bb7e432774f81d/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
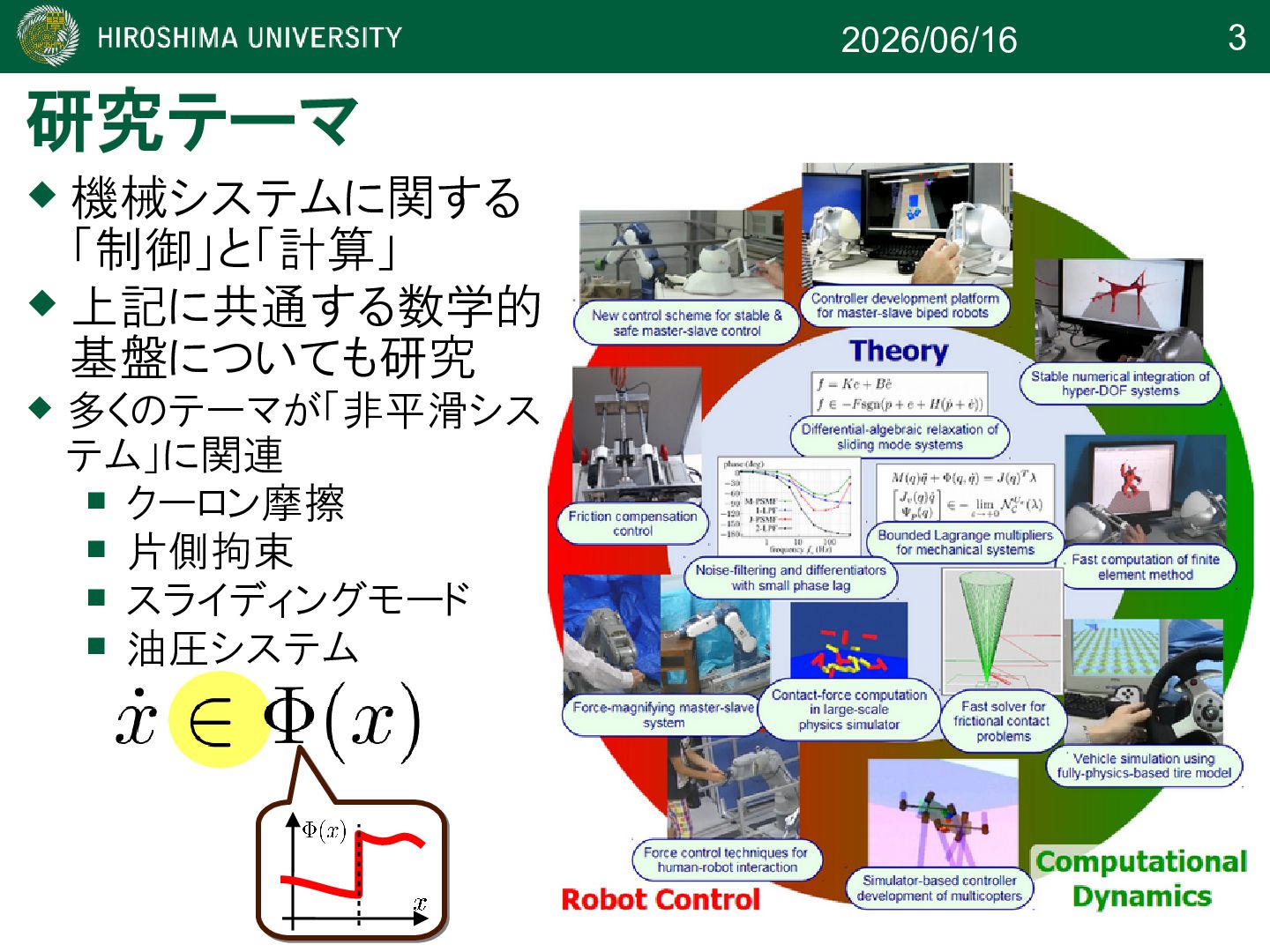
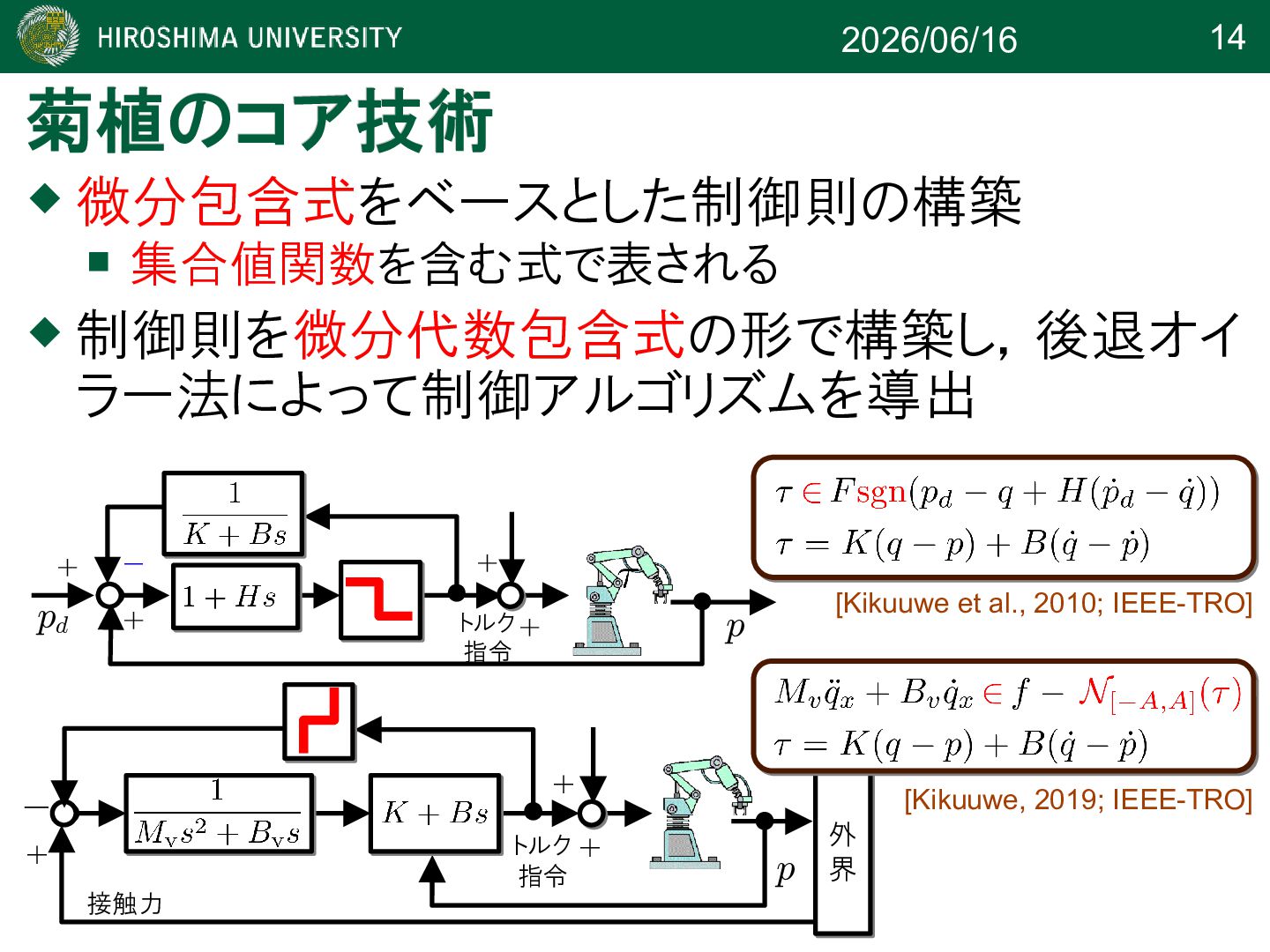
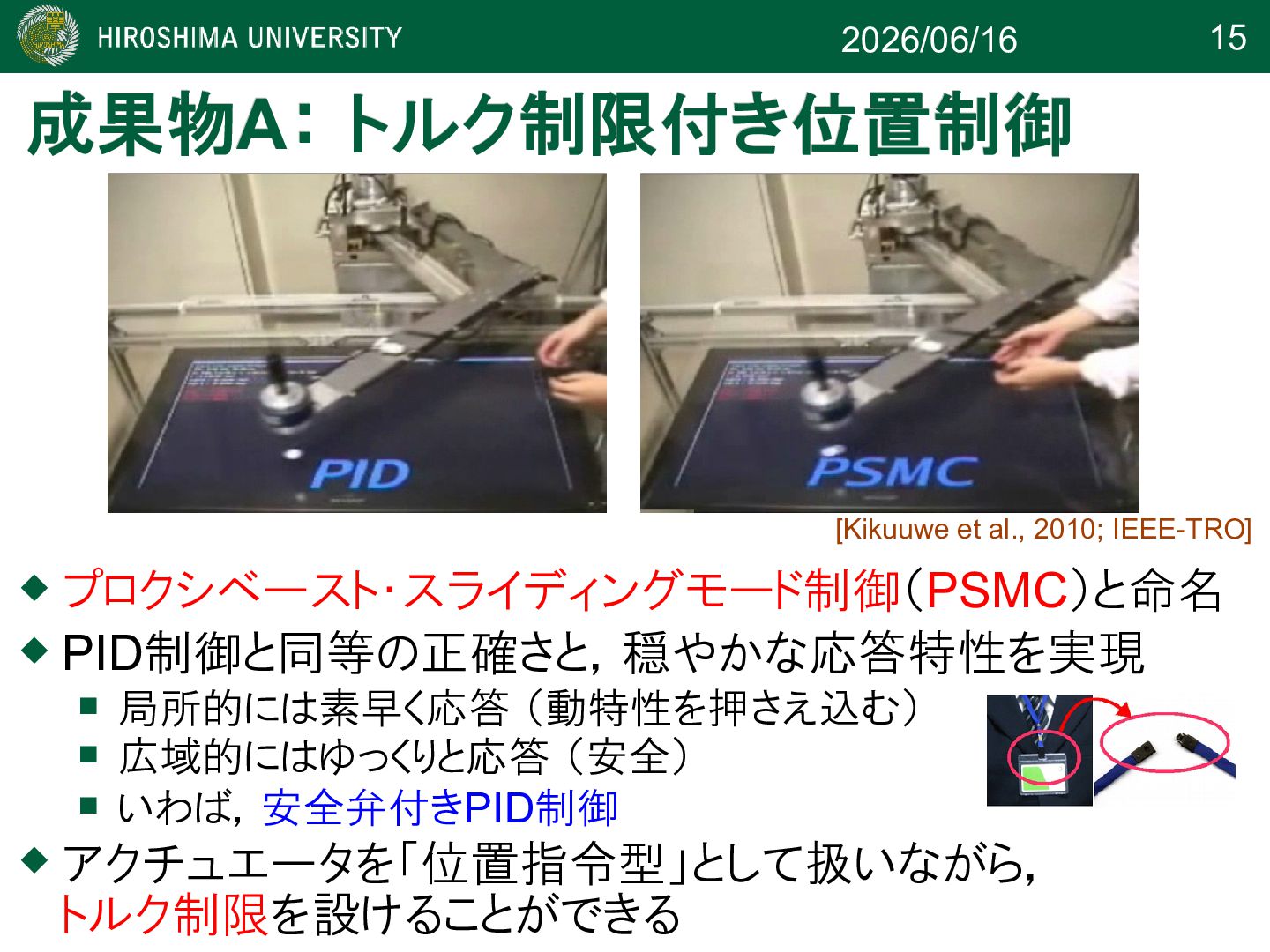
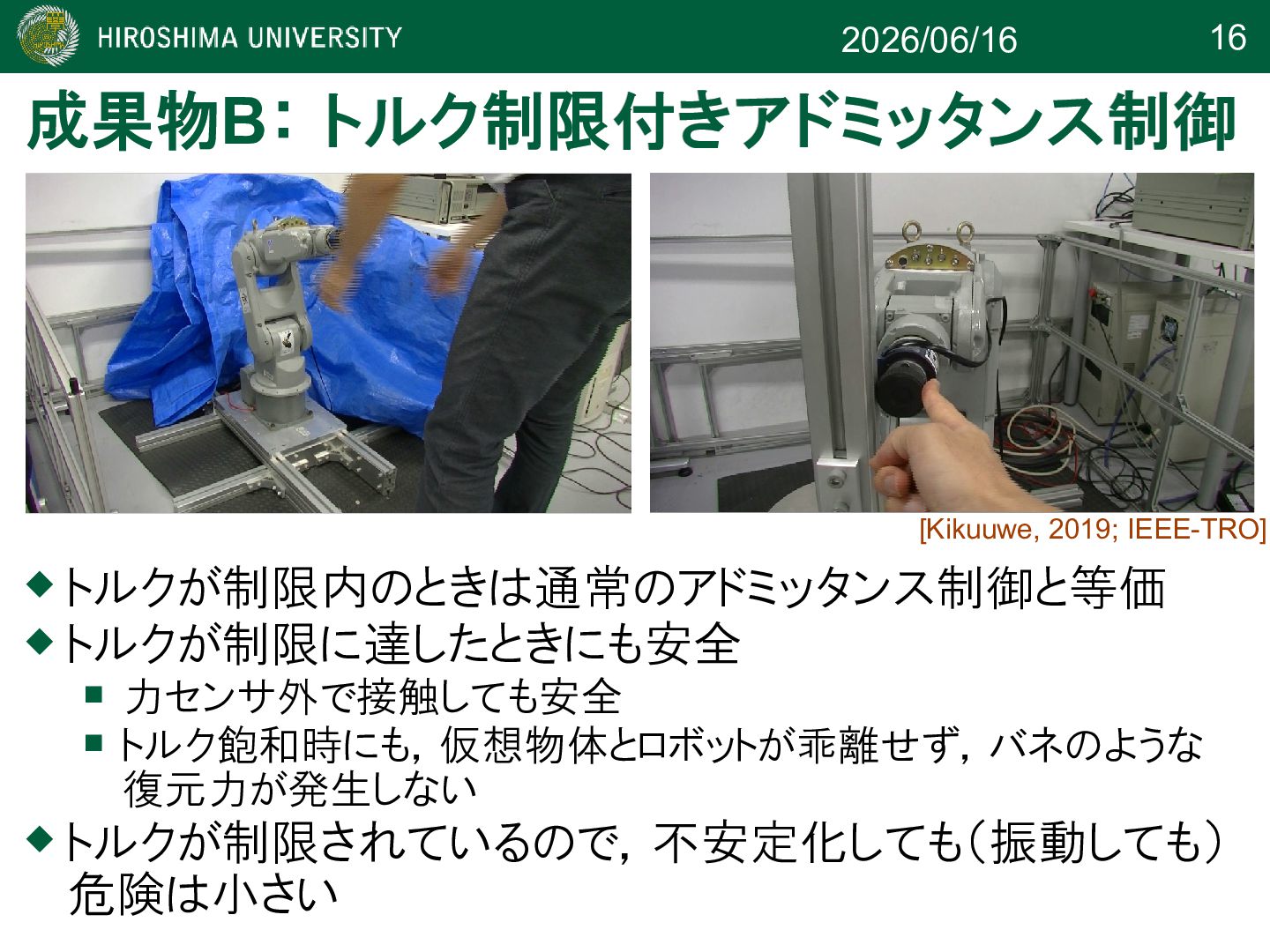
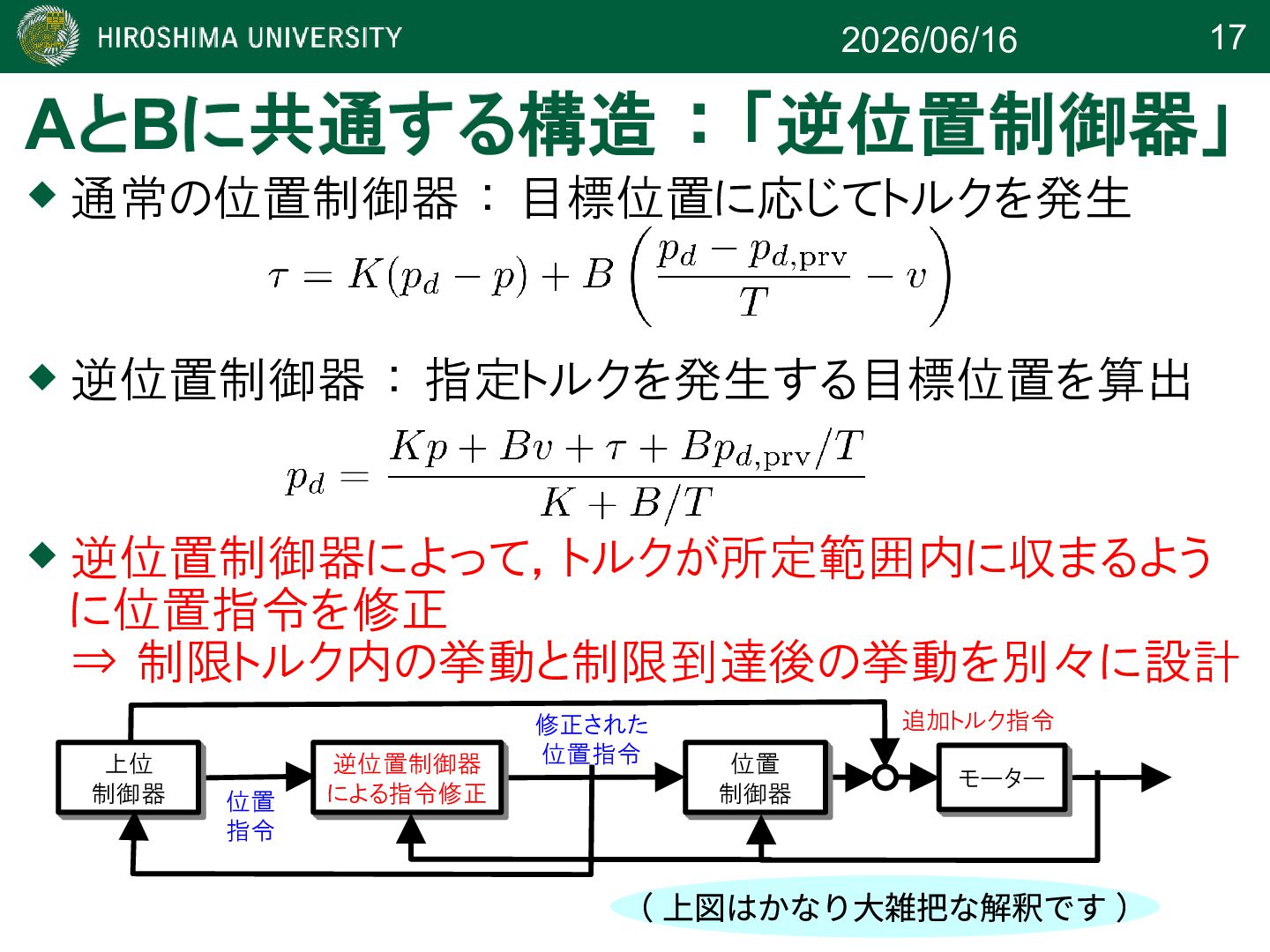
![13 2026/06/16 [2] [2] 菊植の研究について 菊植の研究について [2] [2] 菊植の研究について 菊植の研究について](https://files.speakerdeck.com/presentations/86643e84858e45ca99bb7e432774f81d/slide_11.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
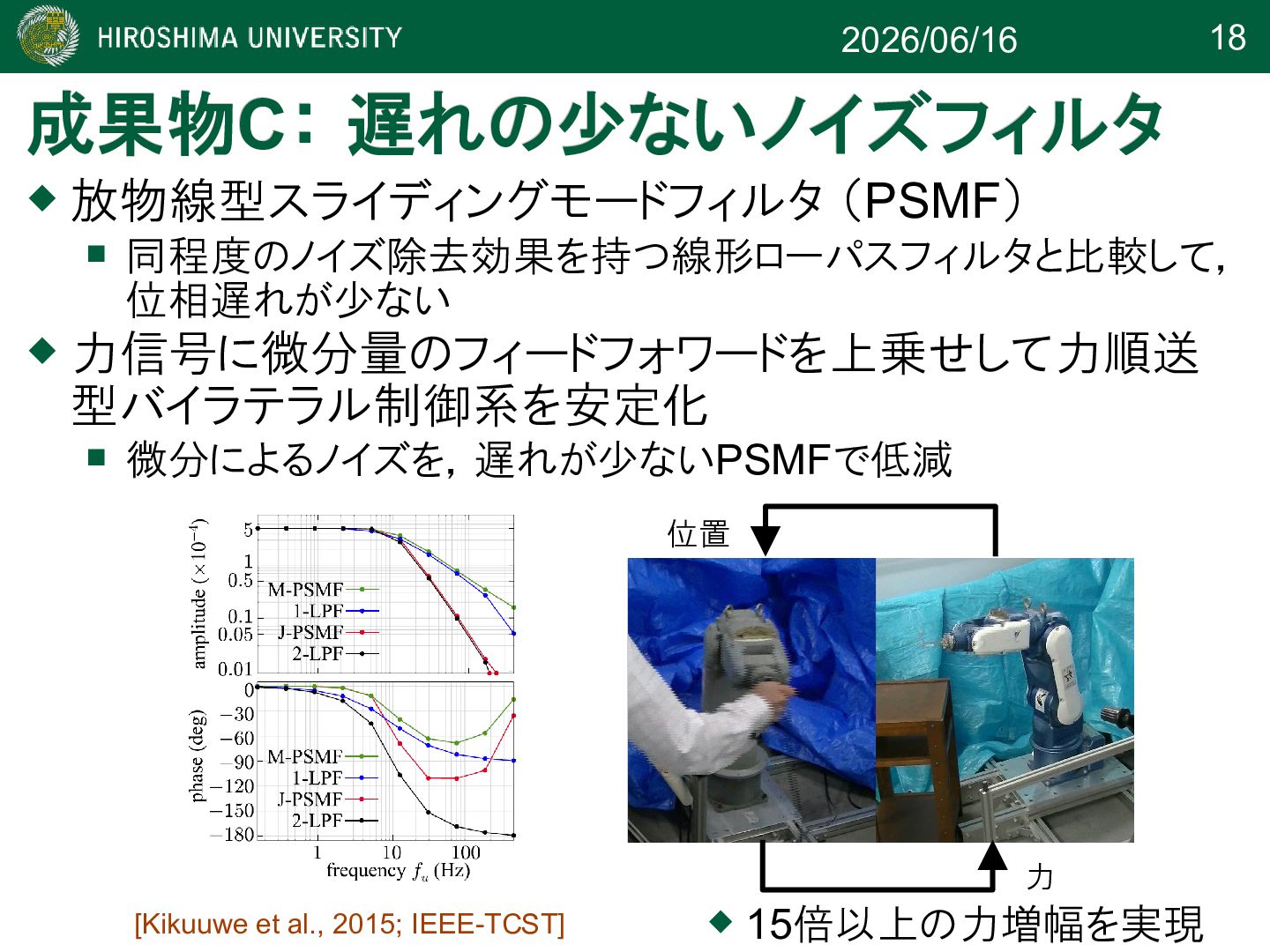
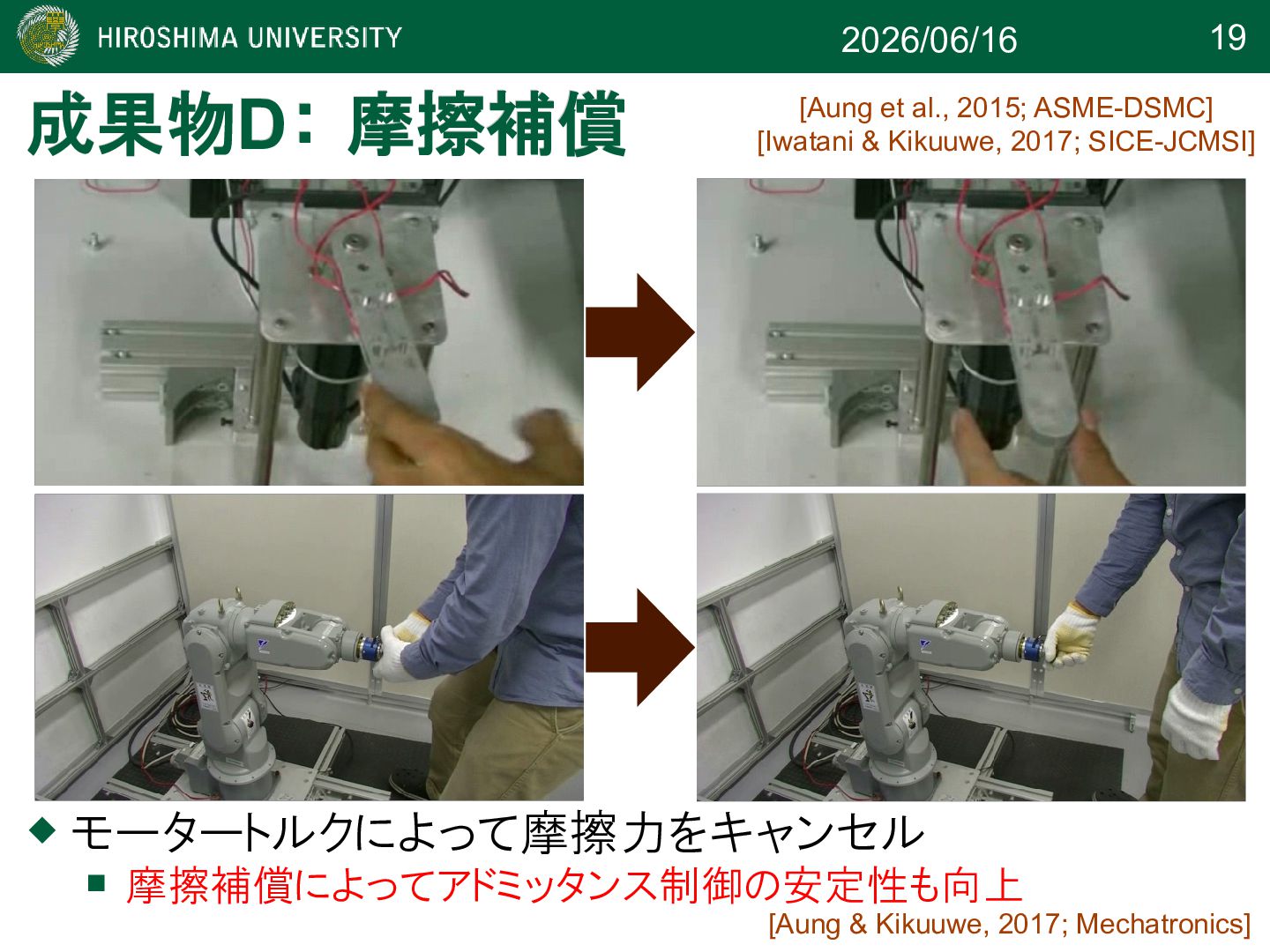
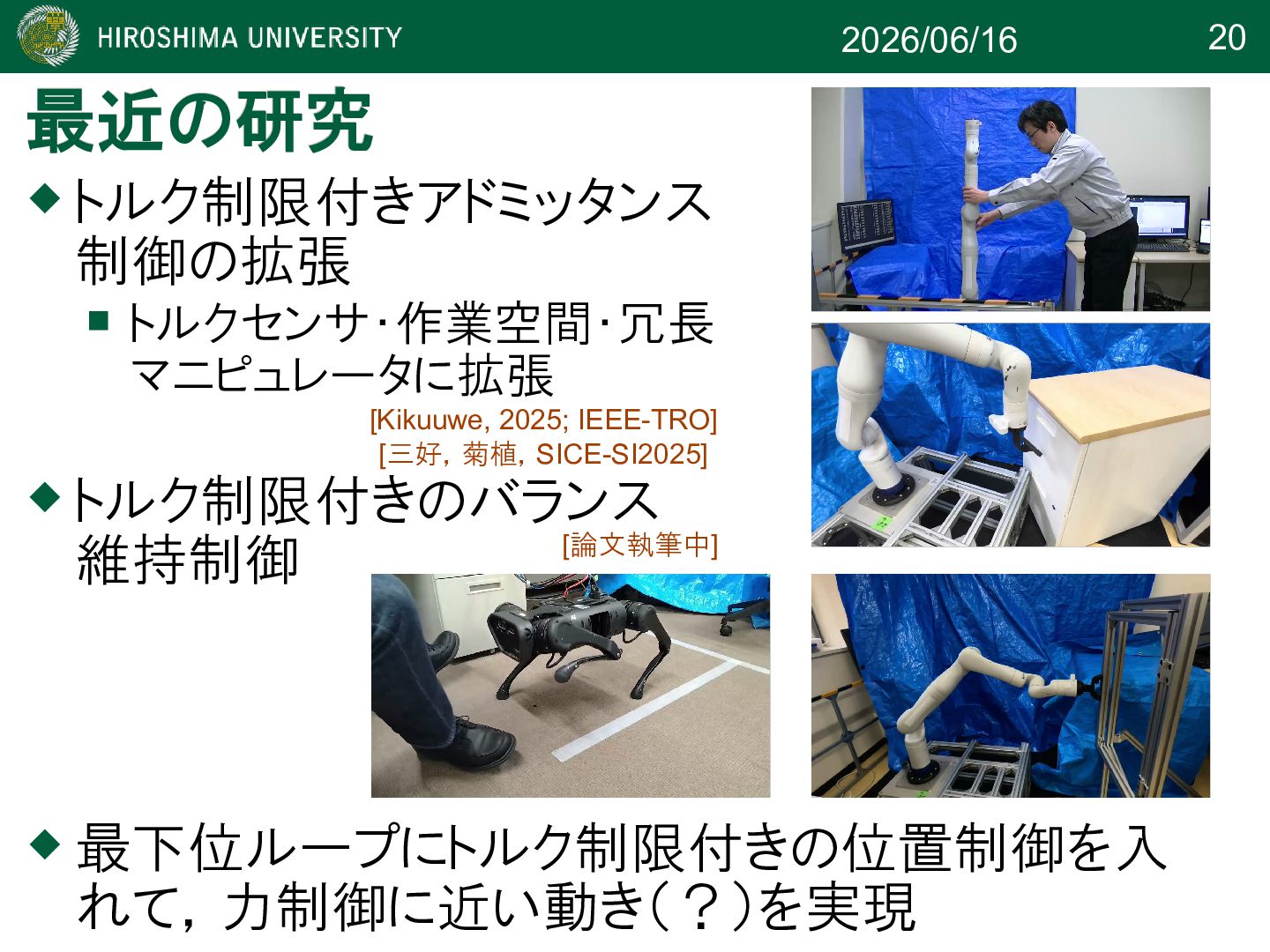
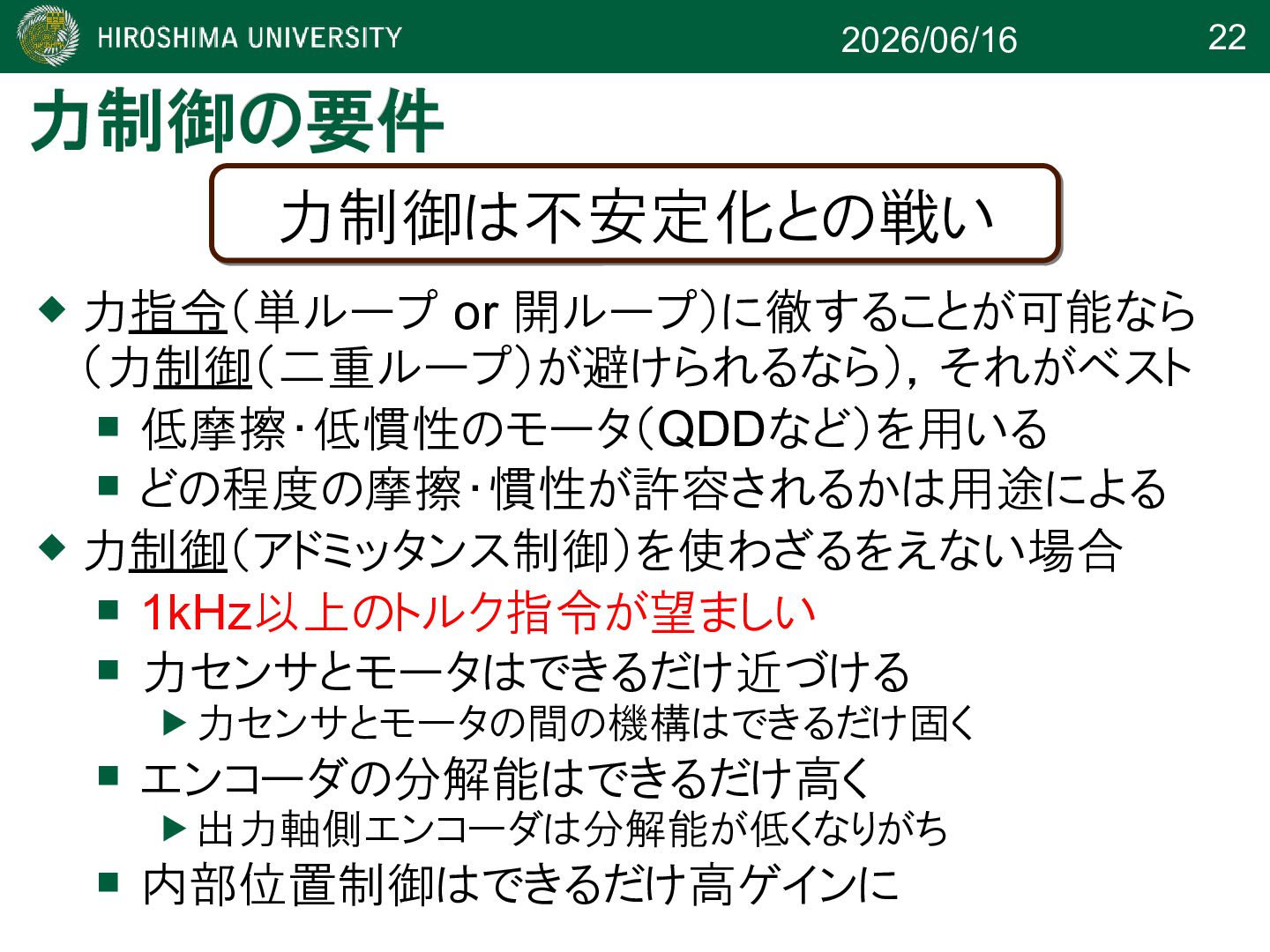
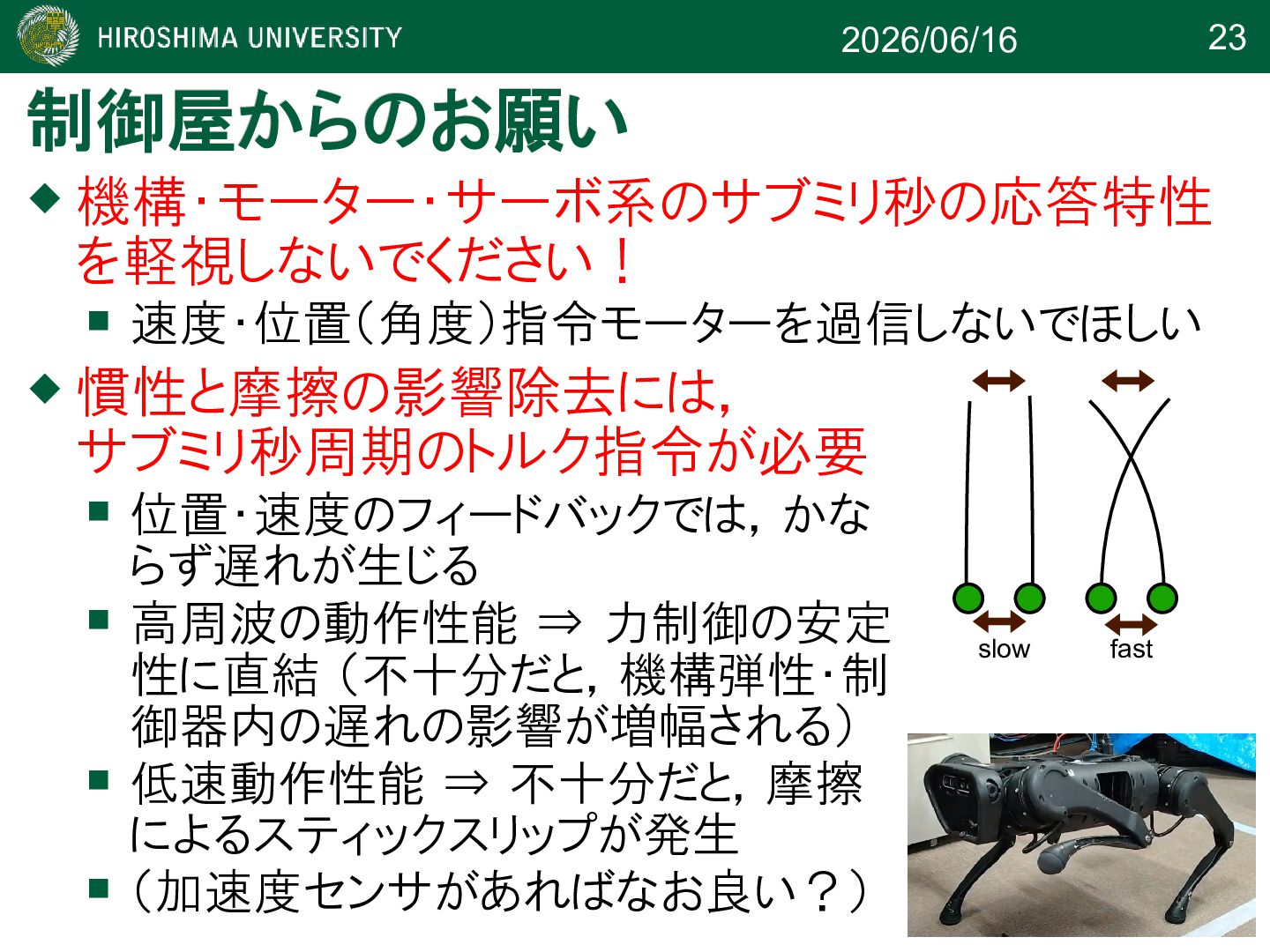
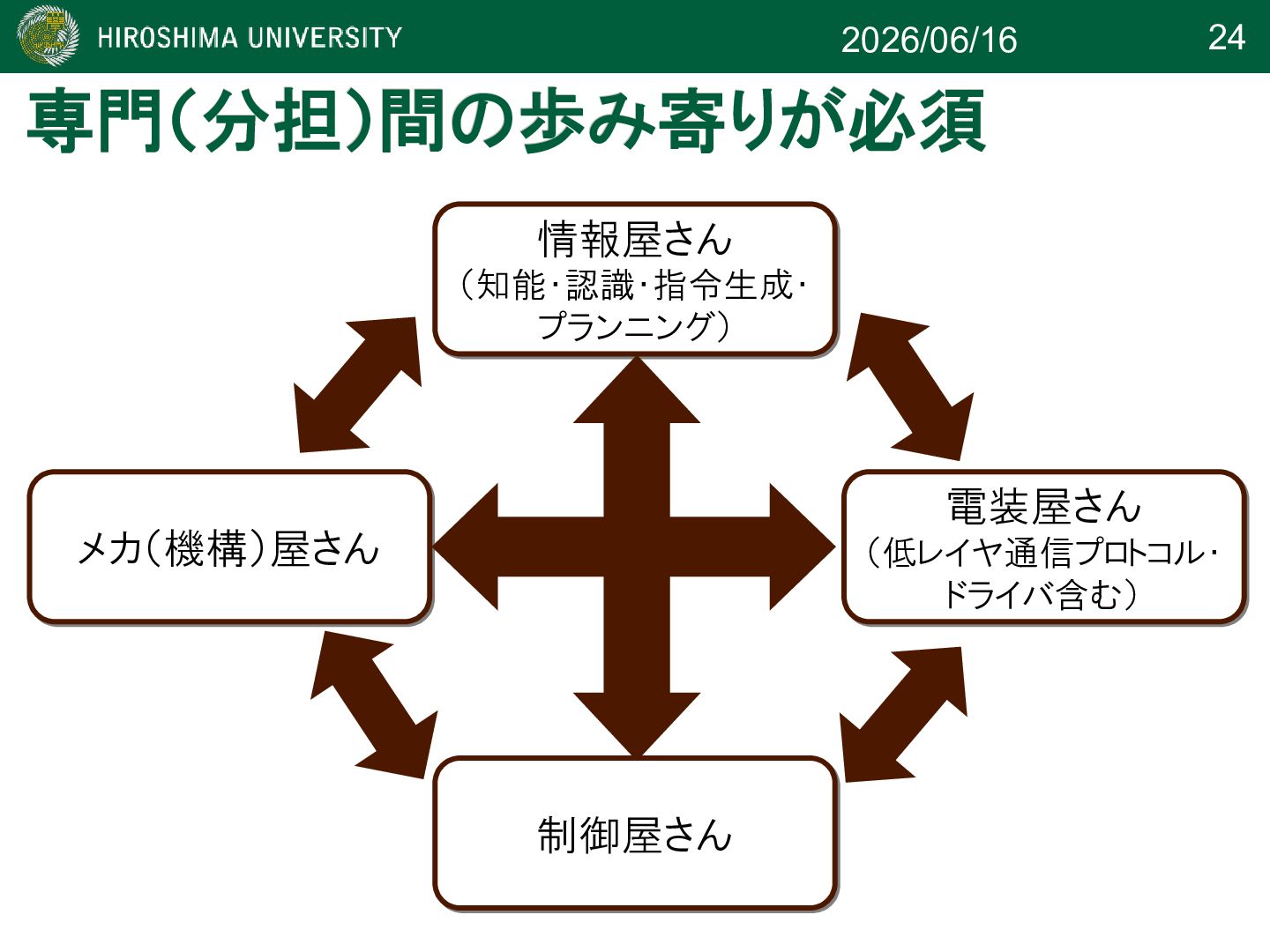
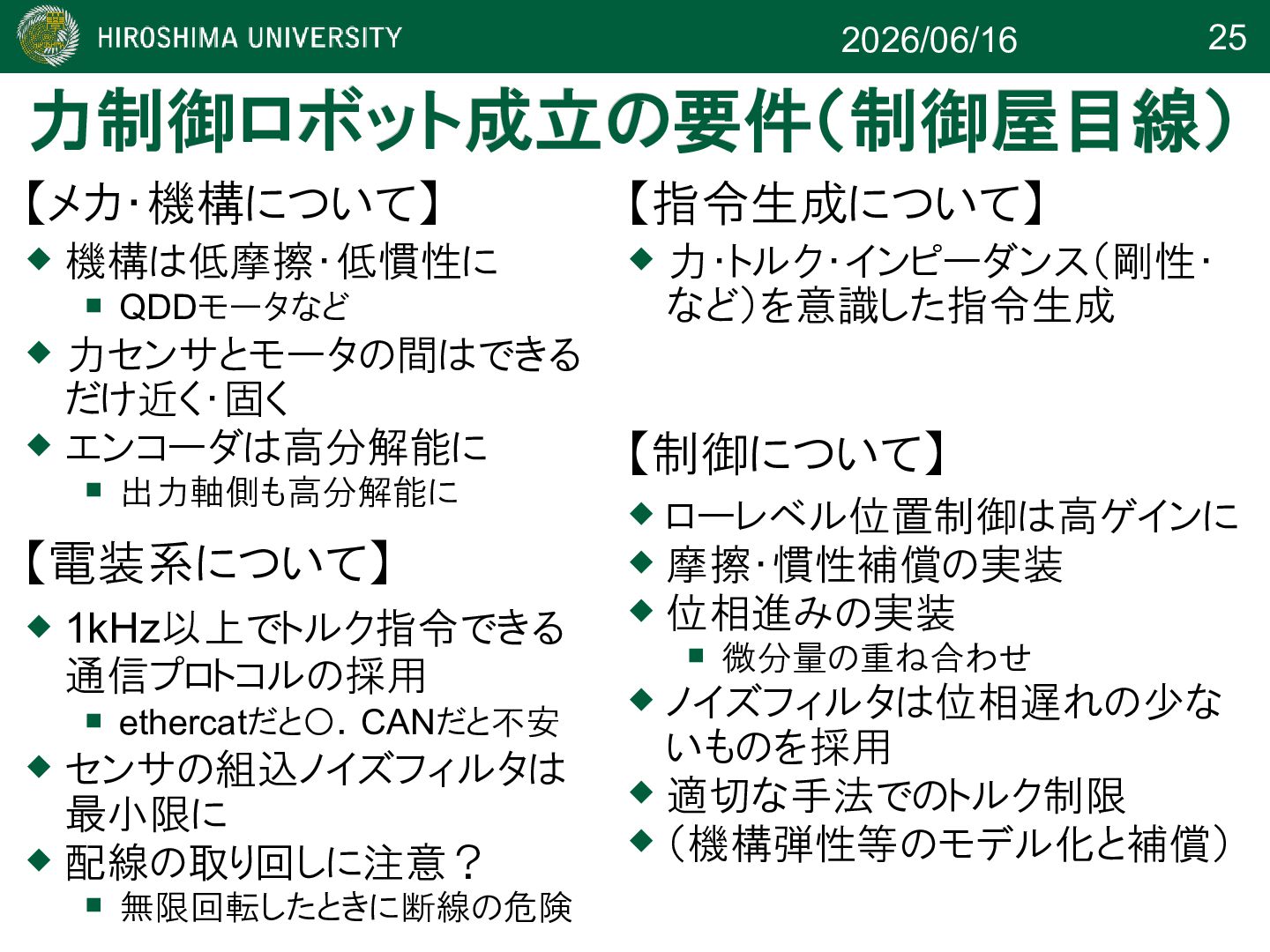
![21 2026/06/16 [3] [3] 力制御ロボットには何が必要か 力制御ロボットには何が必要か [3] [3] 力制御ロボットには何が必要か 力制御ロボットには何が必要か](https://files.speakerdeck.com/presentations/86643e84858e45ca99bb7e432774f81d/slide_19.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
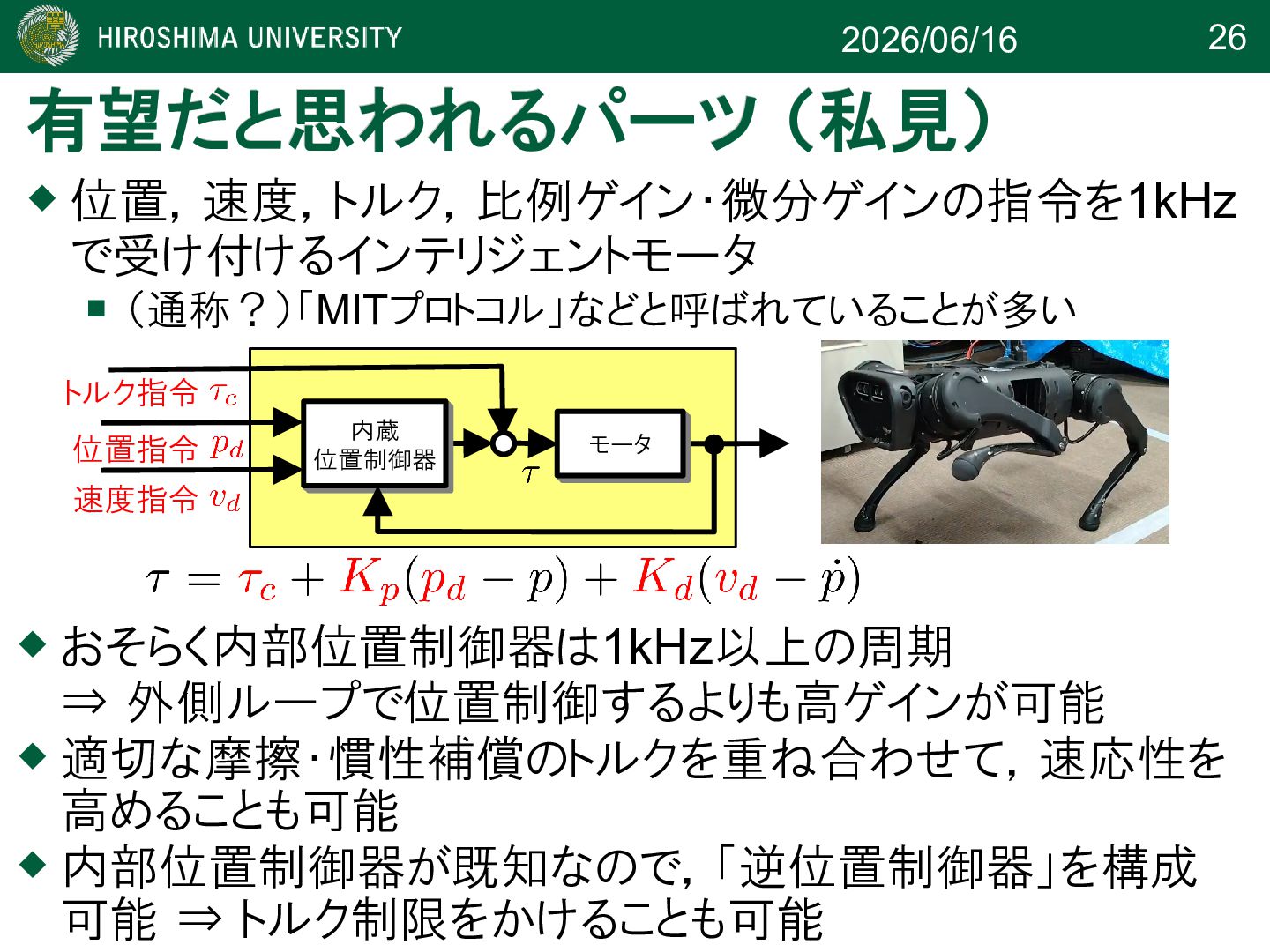
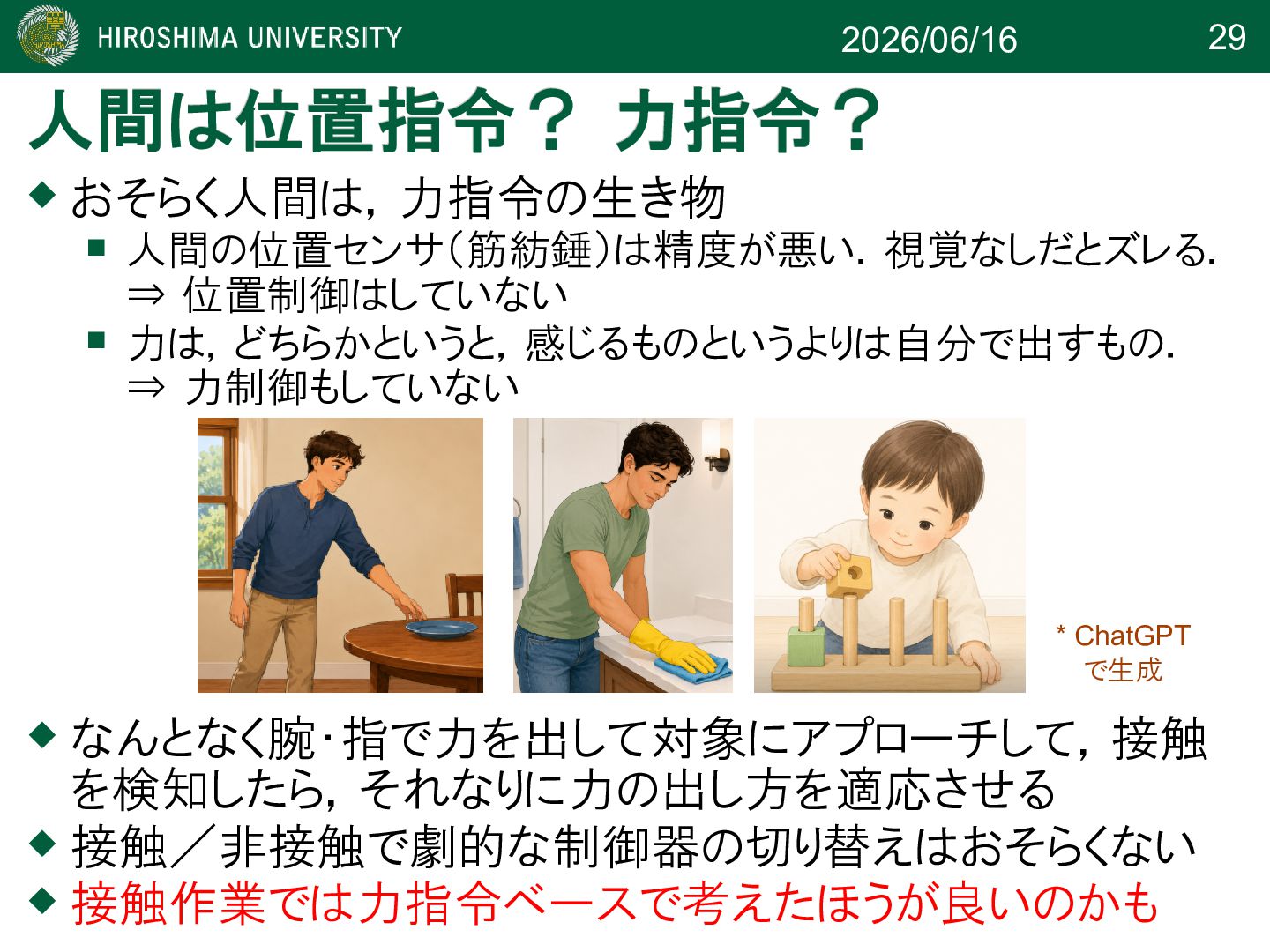
![28 2026/06/16 [4] [4] 「力指令」ベースの動作生成 「力指令」ベースの動作生成 (話題提起) (話題提起) [4] [4]](https://files.speakerdeck.com/presentations/86643e84858e45ca99bb7e432774f81d/slide_26.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![35 2026/06/16 まとめ まとめ [1] 力制御とは 力制御と力指令 ](https://files.speakerdeck.com/presentations/86643e84858e45ca99bb7e432774f81d/slide_31.jpg){kind=link}