With the emergence of PicoRuby, mruby-centered technologies have increasingly been used as lightweight operating environments for microcontrollers.
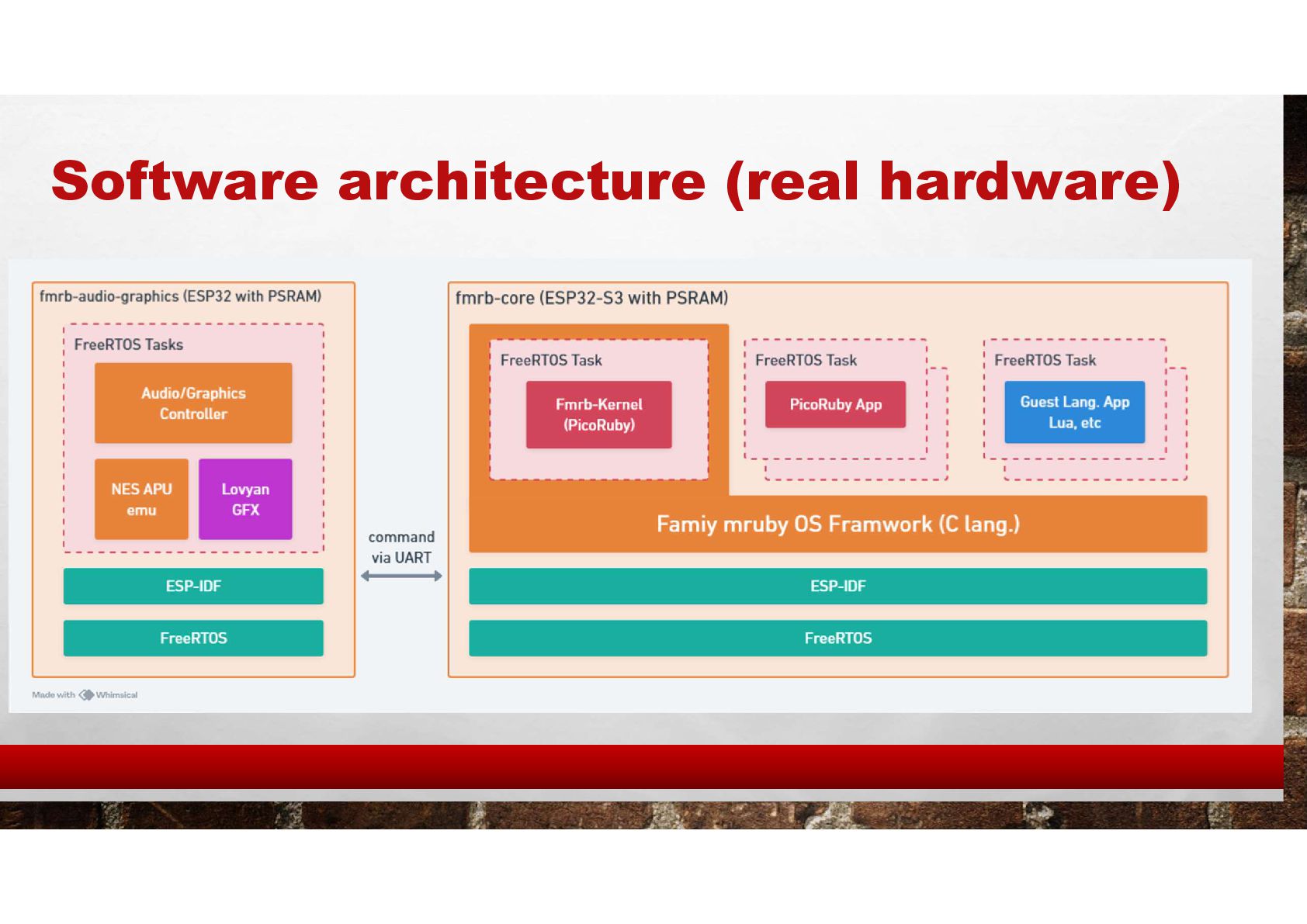
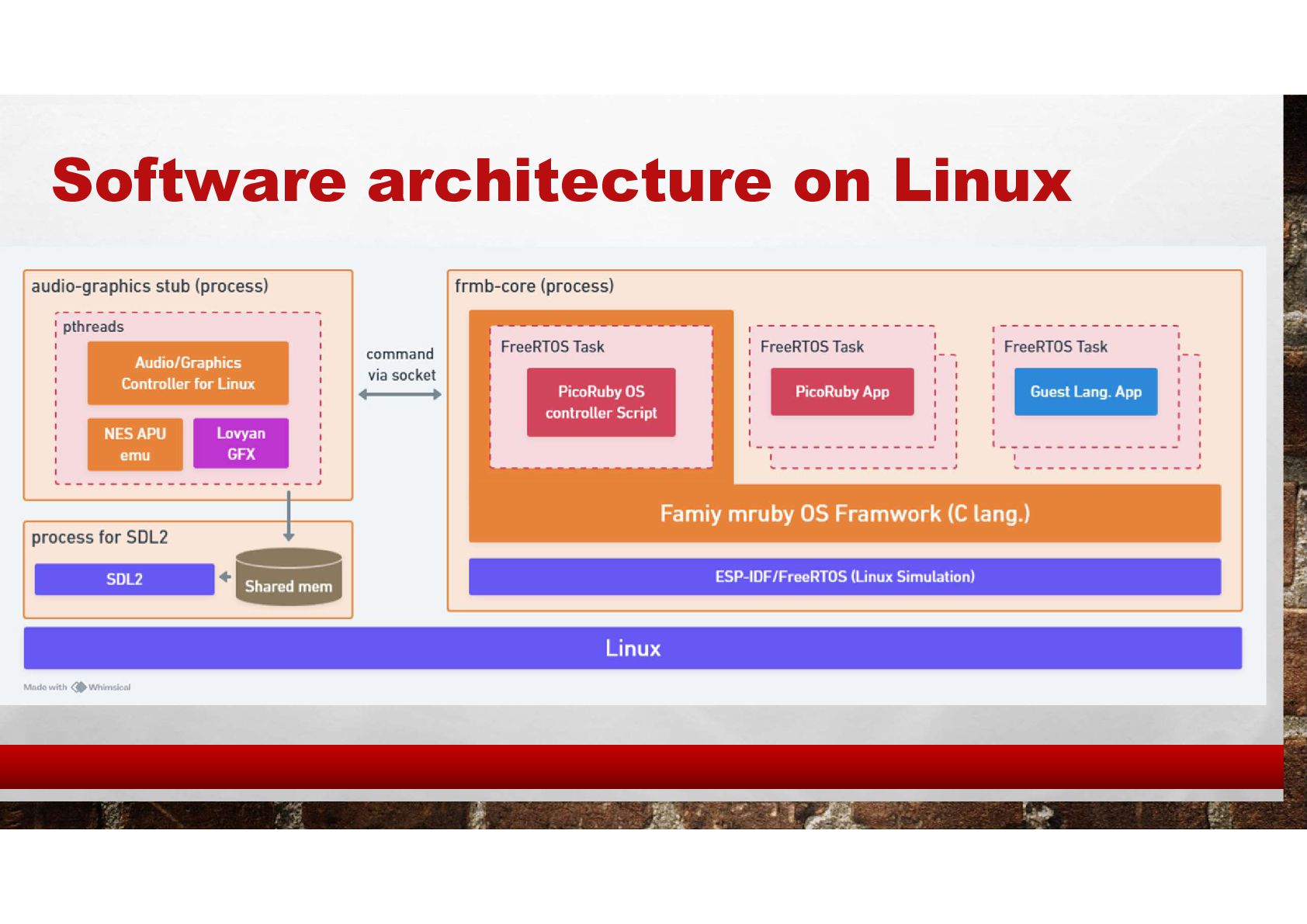
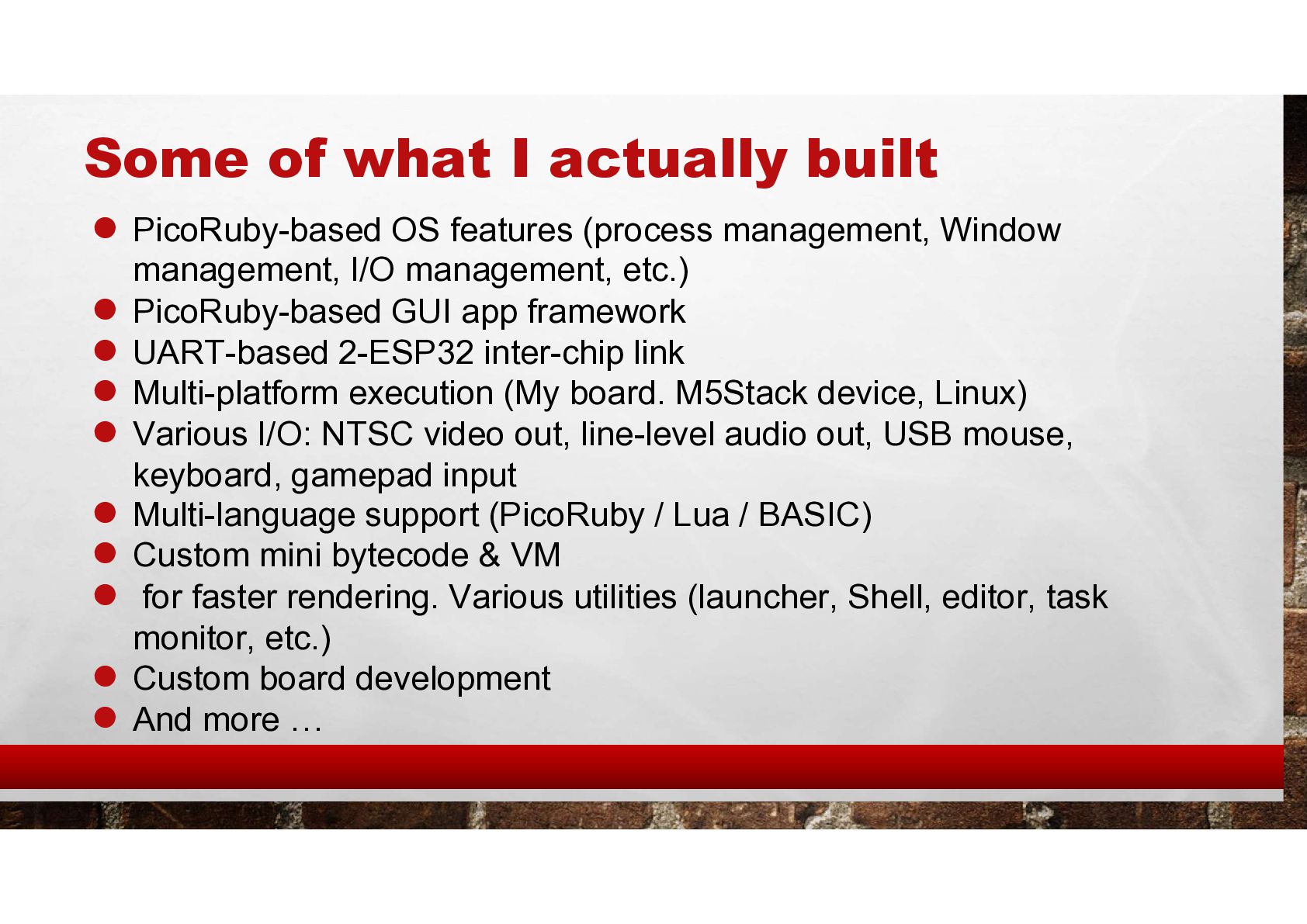
In this talk, I present a more self-contained approach: an operating system for microcontrollers built around PicoRuby, where the mruby VM serves as the system core. I call this framework Family mruby OS.
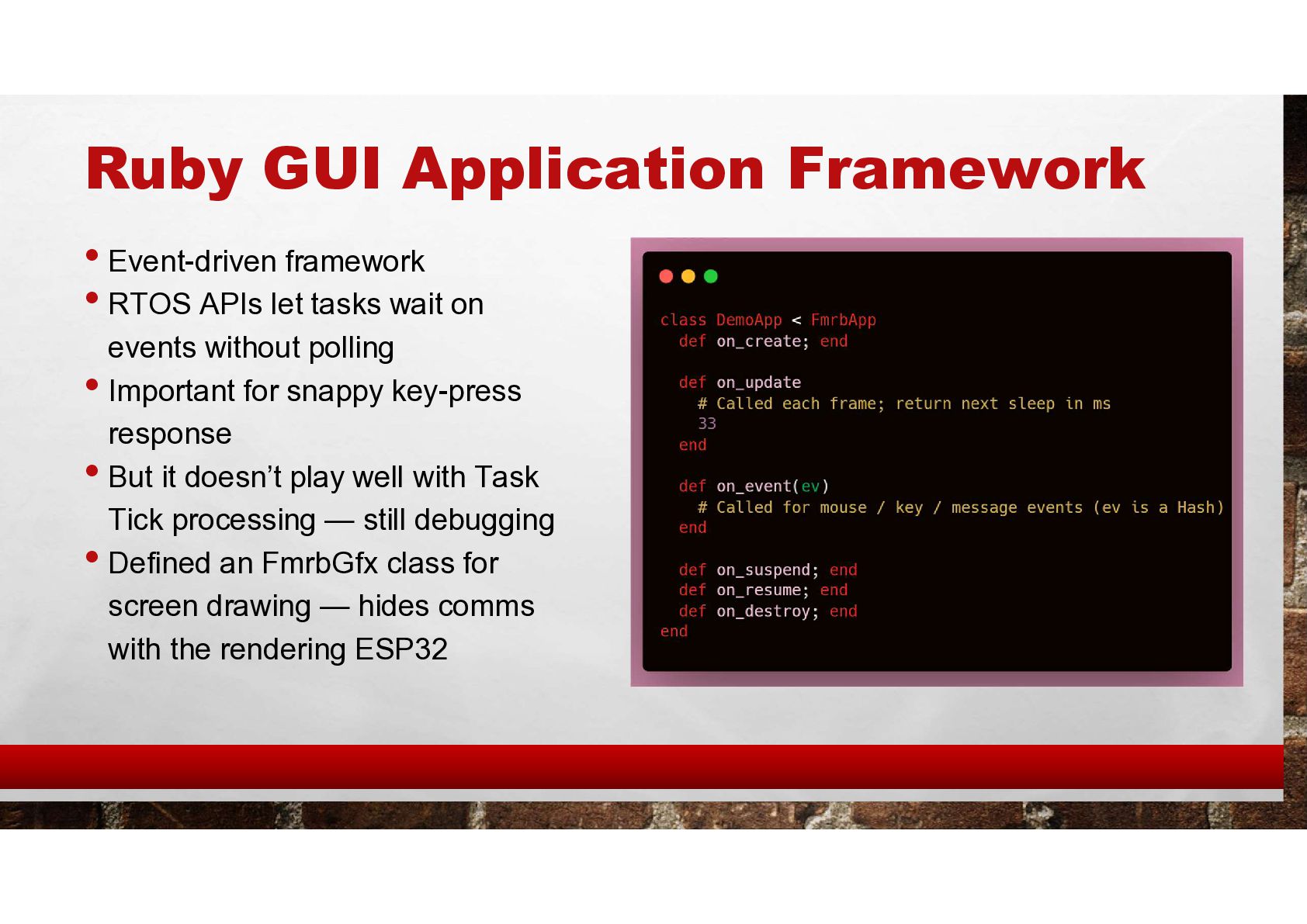
The system enables developers to write and run Ruby applications directly on a microcontroller with a GUI, using a USB keyboard, mouse, and display—without relying on a PC.
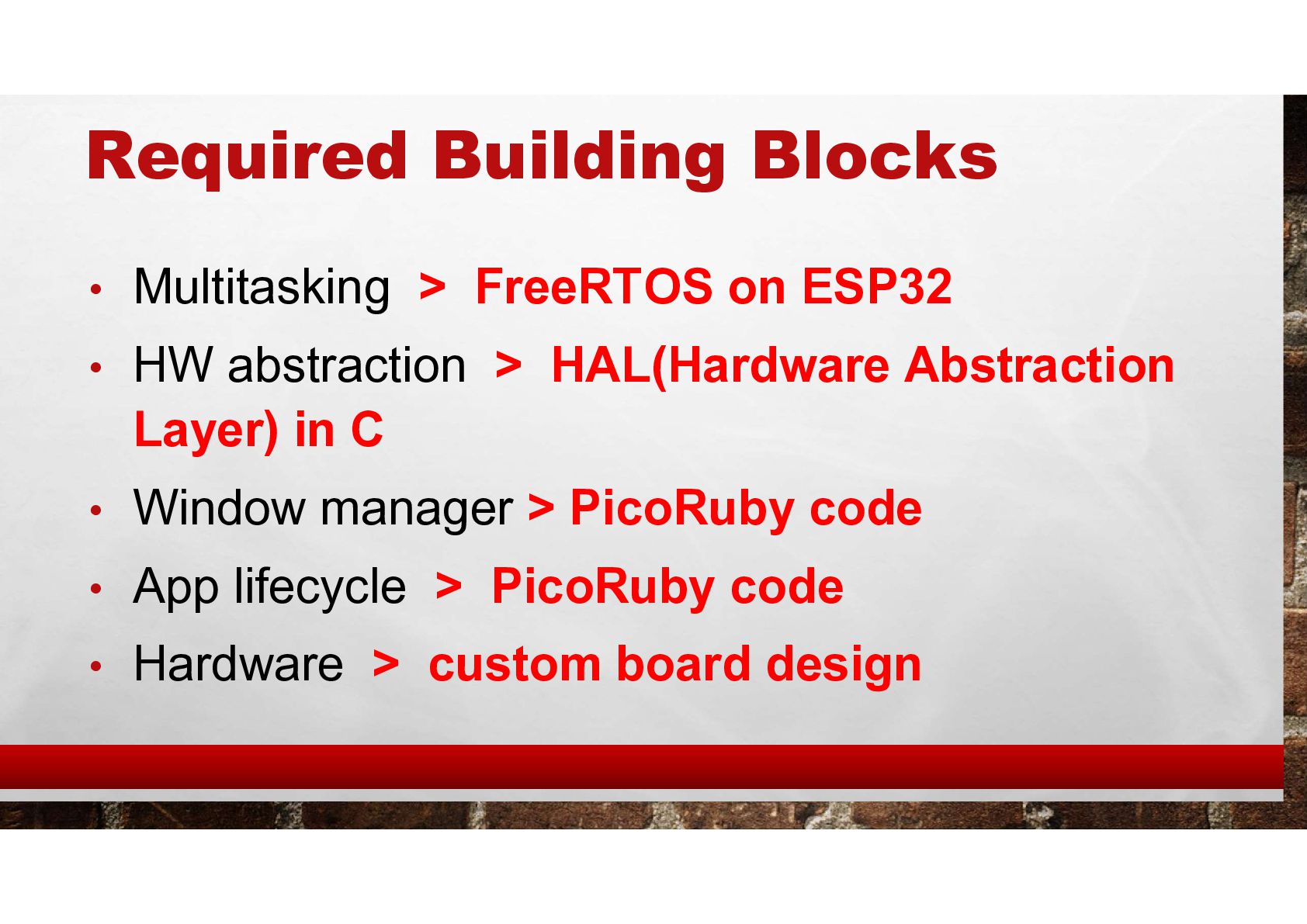
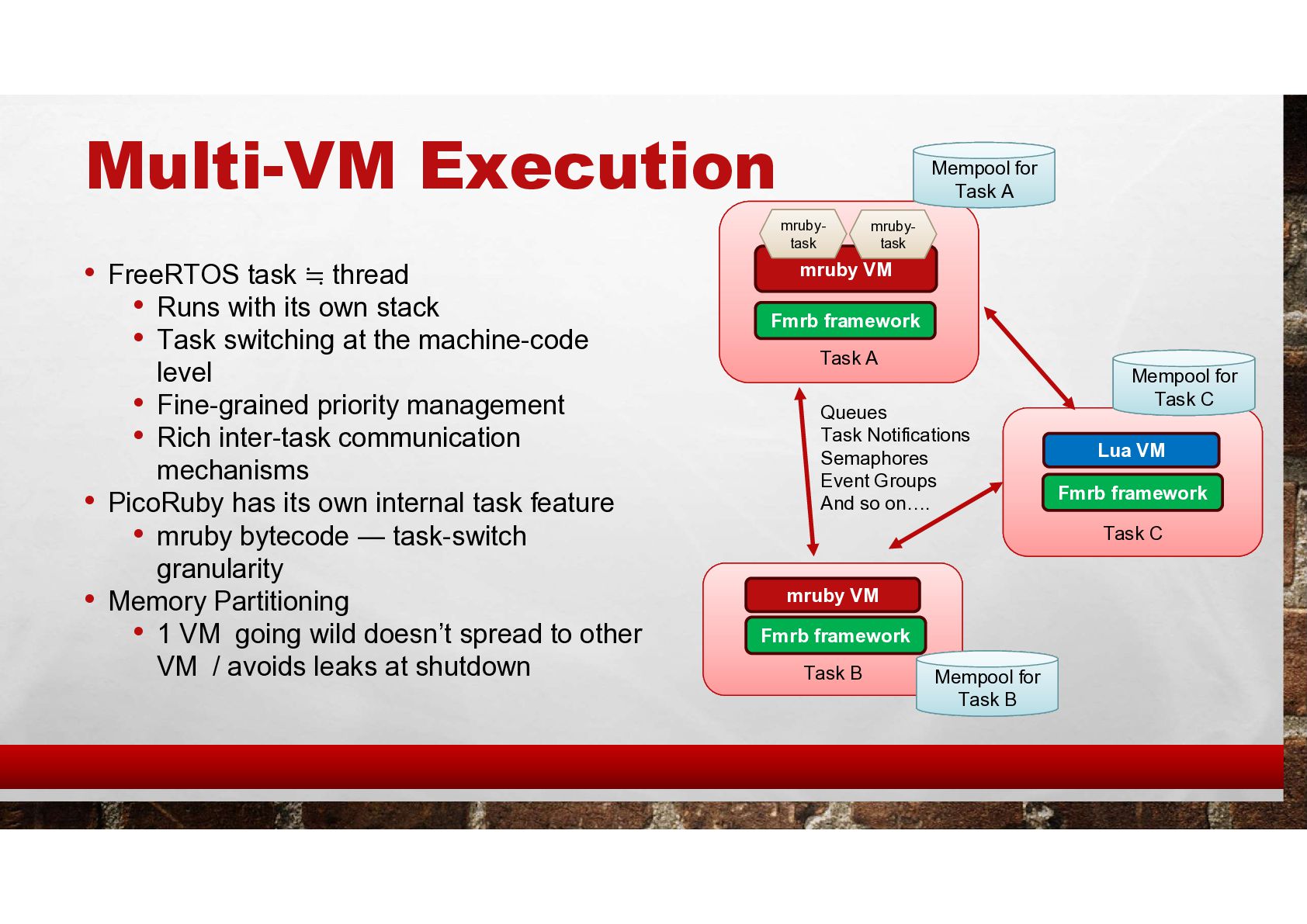
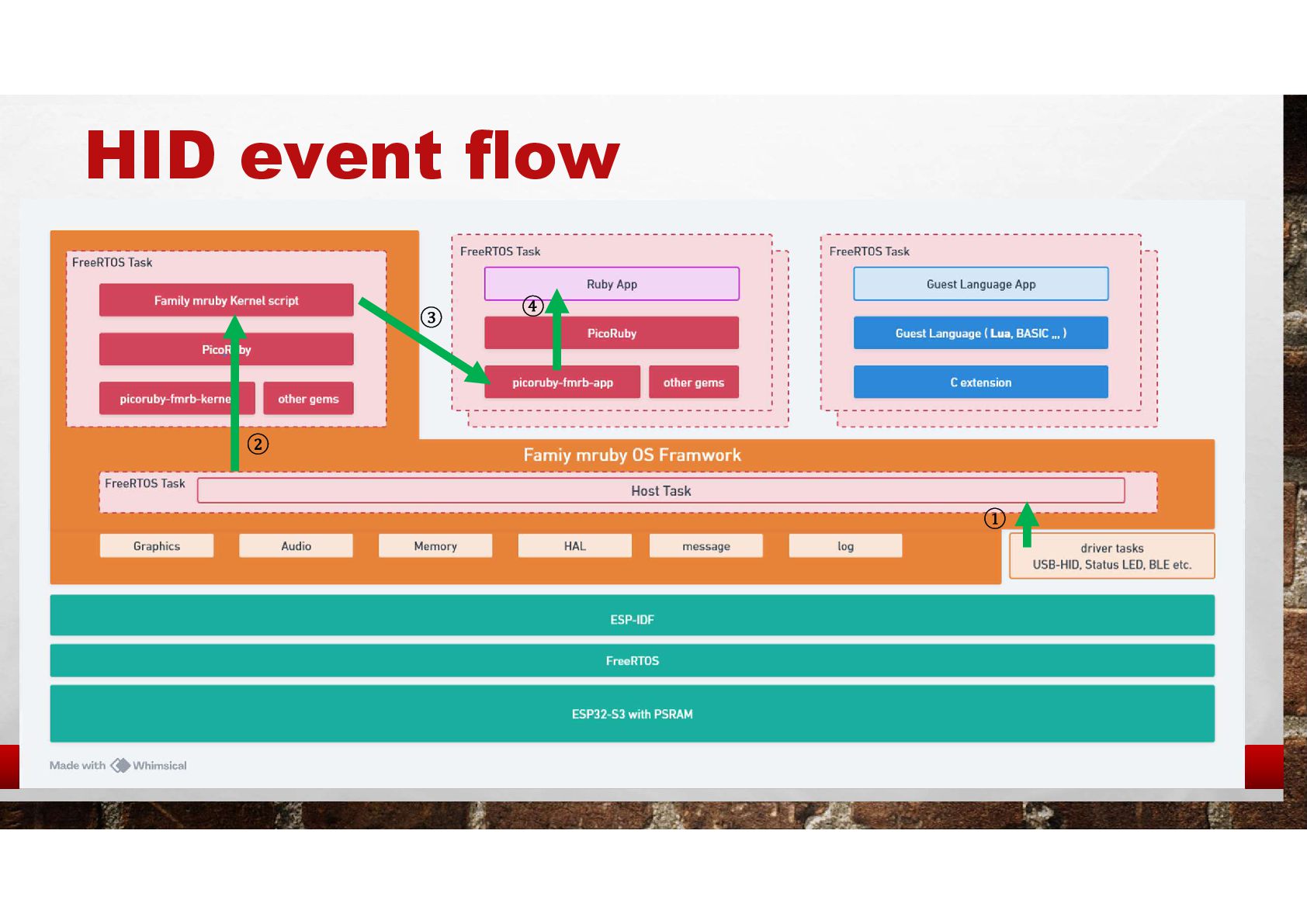
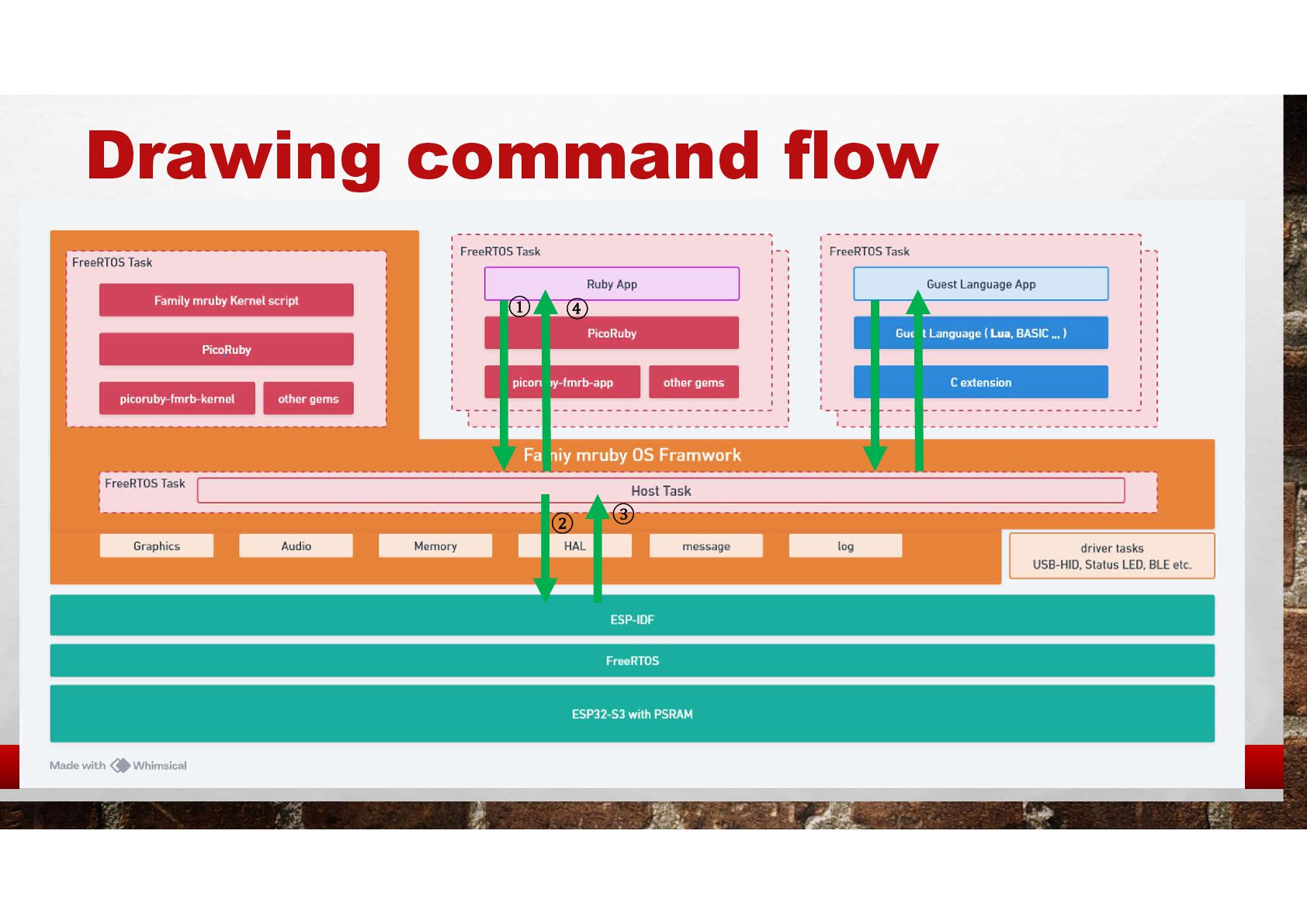
By leveraging FreeRTOS, multiple PicoRuby VMs, as well as VMs of other languages, can run concurrently at the machine-code level, enabling true multi-VM execution while keeping Ruby responsible for application lifecycle management.
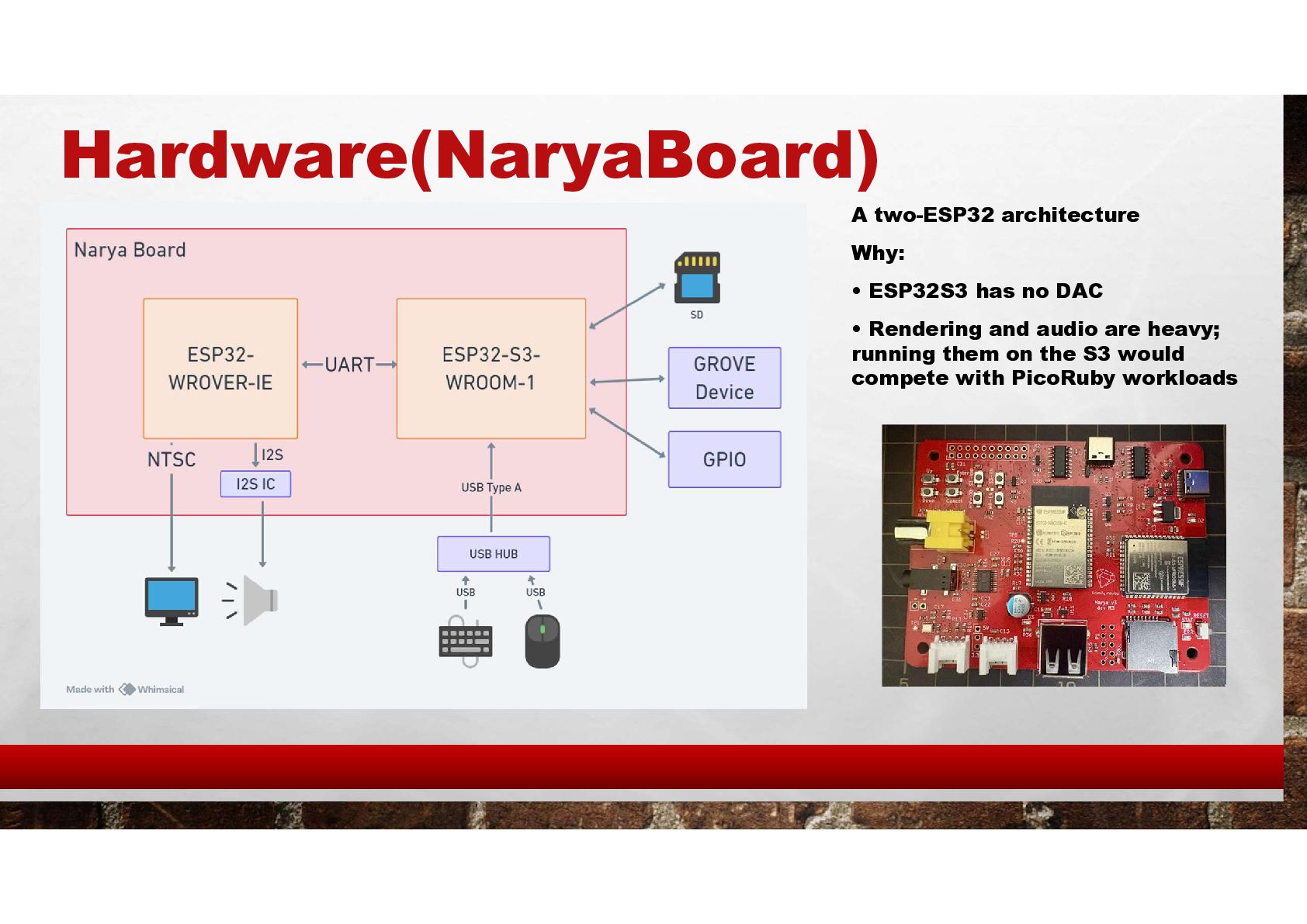
I will explain the design and implementation of this framework, discuss the key technical challenges involved, and demonstrate the system running on real hardware.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Demo Scenario 1: Dev Experience [ Simulator DEMO ] •](https://files.speakerdeck.com/presentations/6626f6126a464ec4b3937ff25c00f79d/slide_29.jpg){kind=link}
![Demo Scenario 2: Multi-language VM [ Simulator demo ] •](https://files.speakerdeck.com/presentations/6626f6126a464ec4b3937ff25c00f79d/slide_30.jpg){kind=link}
![On the board I built [ LIVE DEMO ] Narya](https://files.speakerdeck.com/presentations/6626f6126a464ec4b3937ff25c00f79d/slide_31.jpg){kind=link}
![Demo Scenario 3: Sound [ LIVE DEMO ] • Open](https://files.speakerdeck.com/presentations/6626f6126a464ec4b3937ff25c00f79d/slide_32.jpg){kind=link}
![Demo Scenario 4: Game [ LIVE DEMO ] •Run a](https://files.speakerdeck.com/presentations/6626f6126a464ec4b3937ff25c00f79d/slide_33.jpg){kind=link}
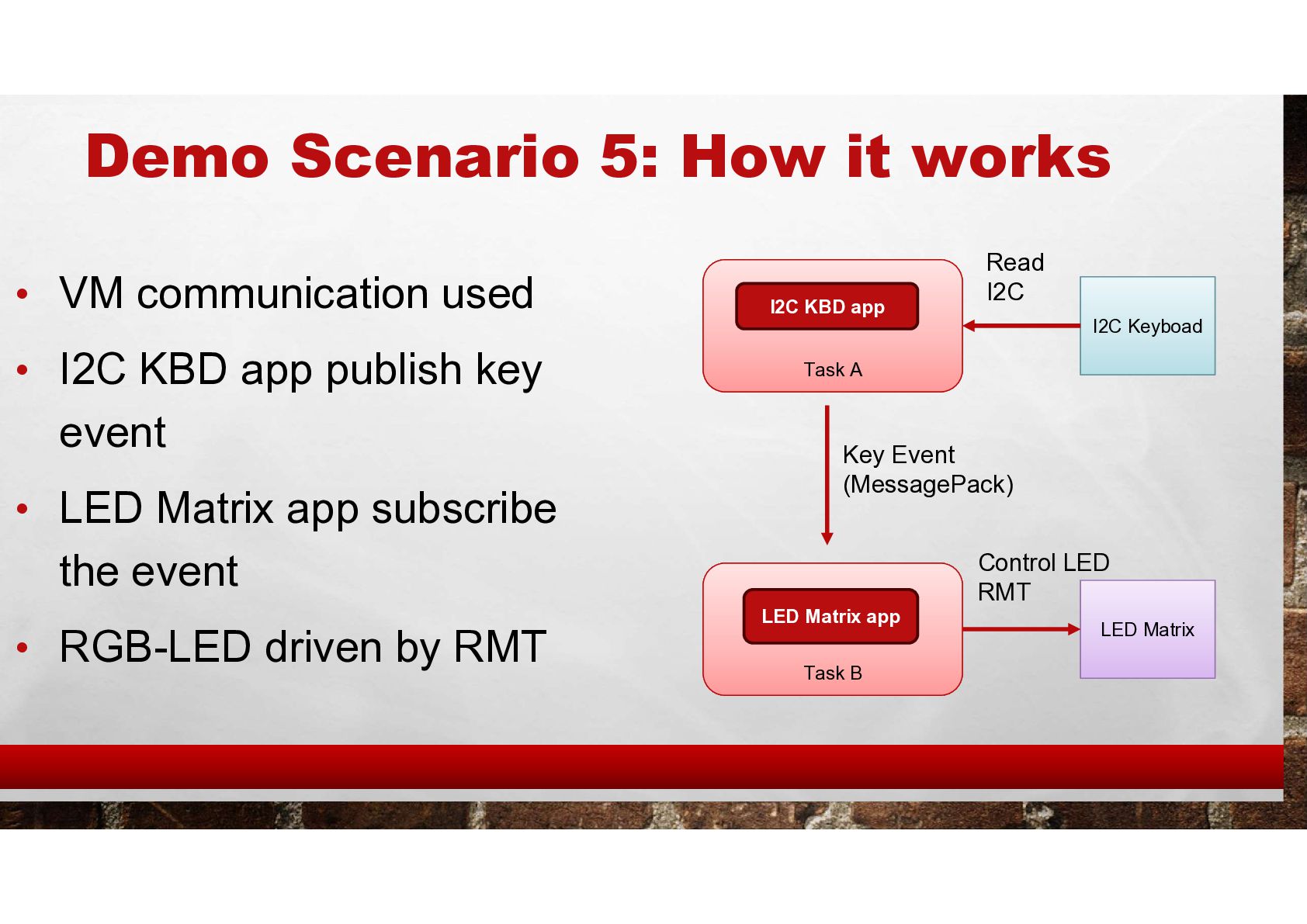
![Demo Scenario 5: Electronics [ Video ] • Open the](https://files.speakerdeck.com/presentations/6626f6126a464ec4b3937ff25c00f79d/slide_34.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}