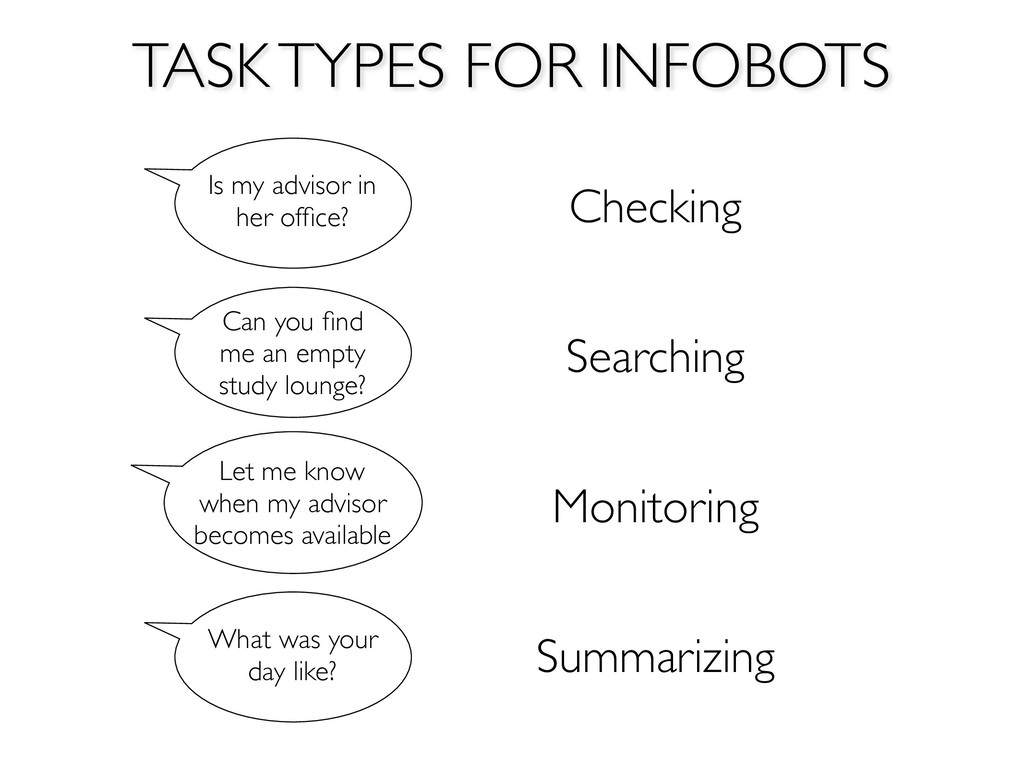
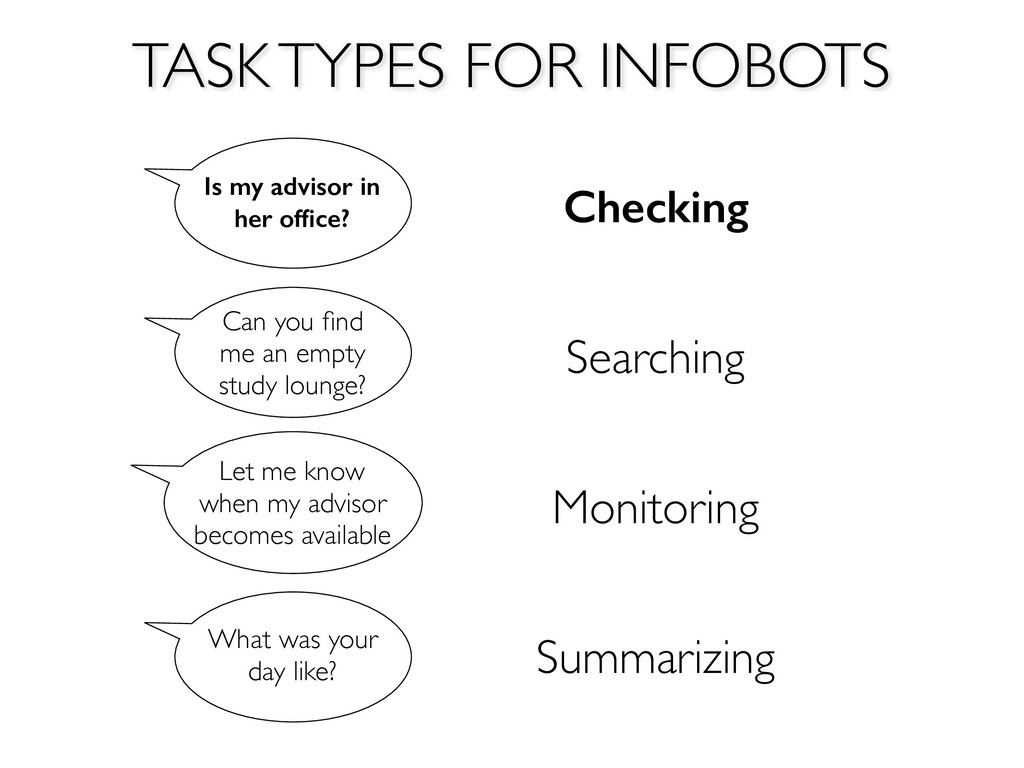
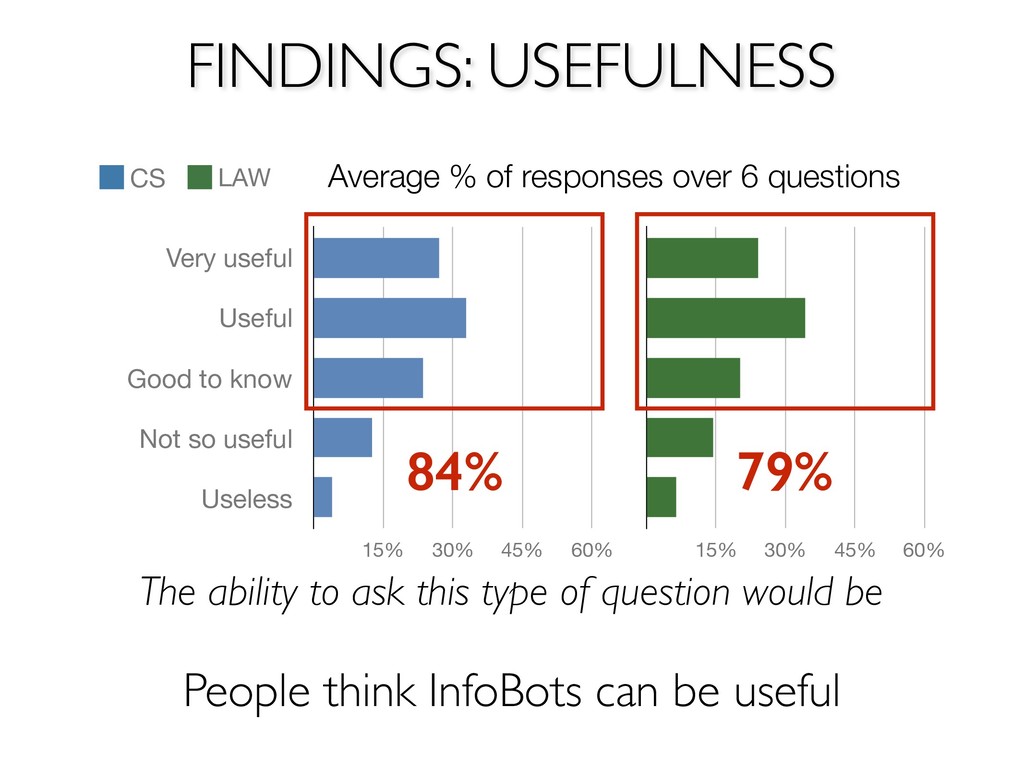
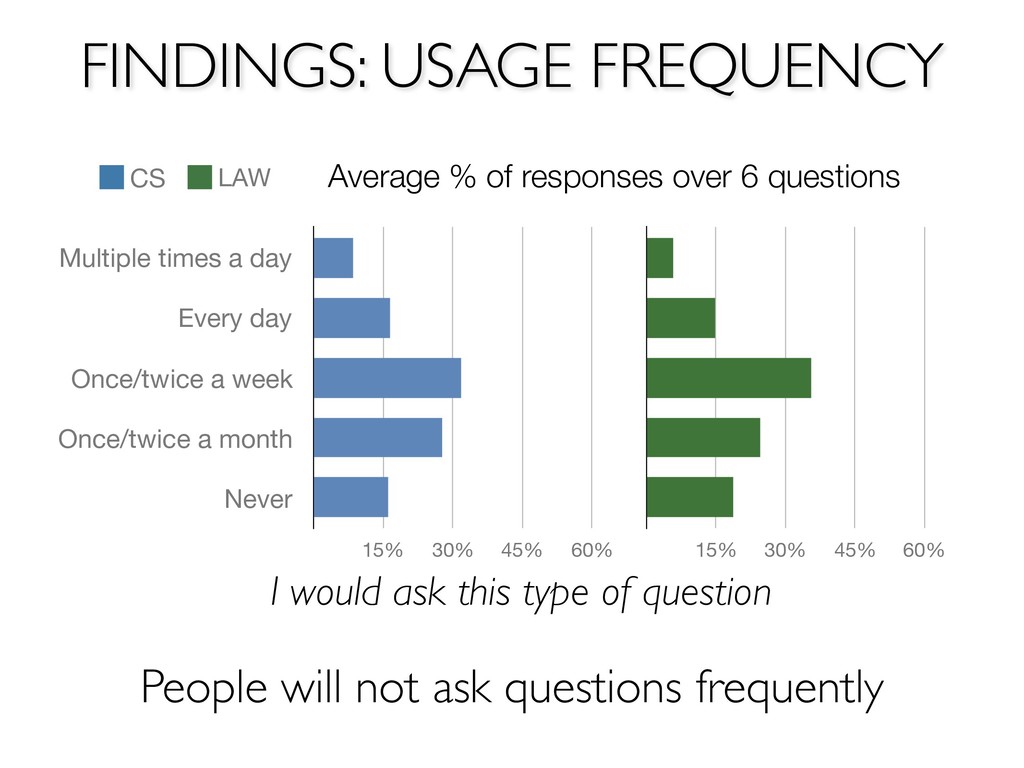
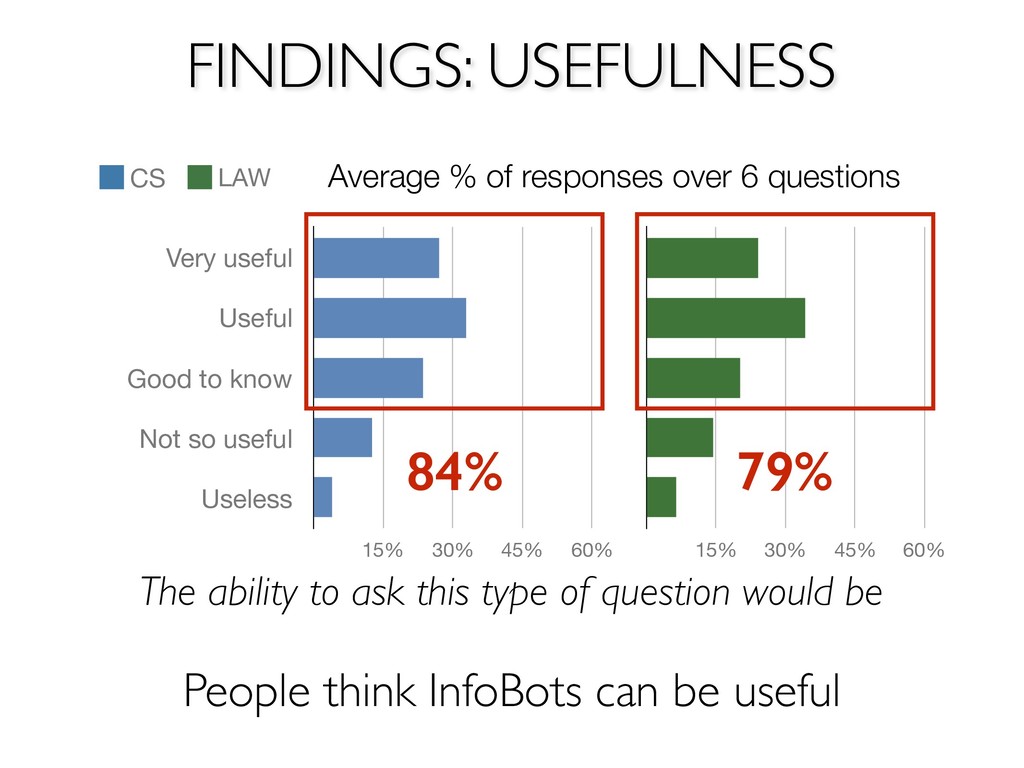
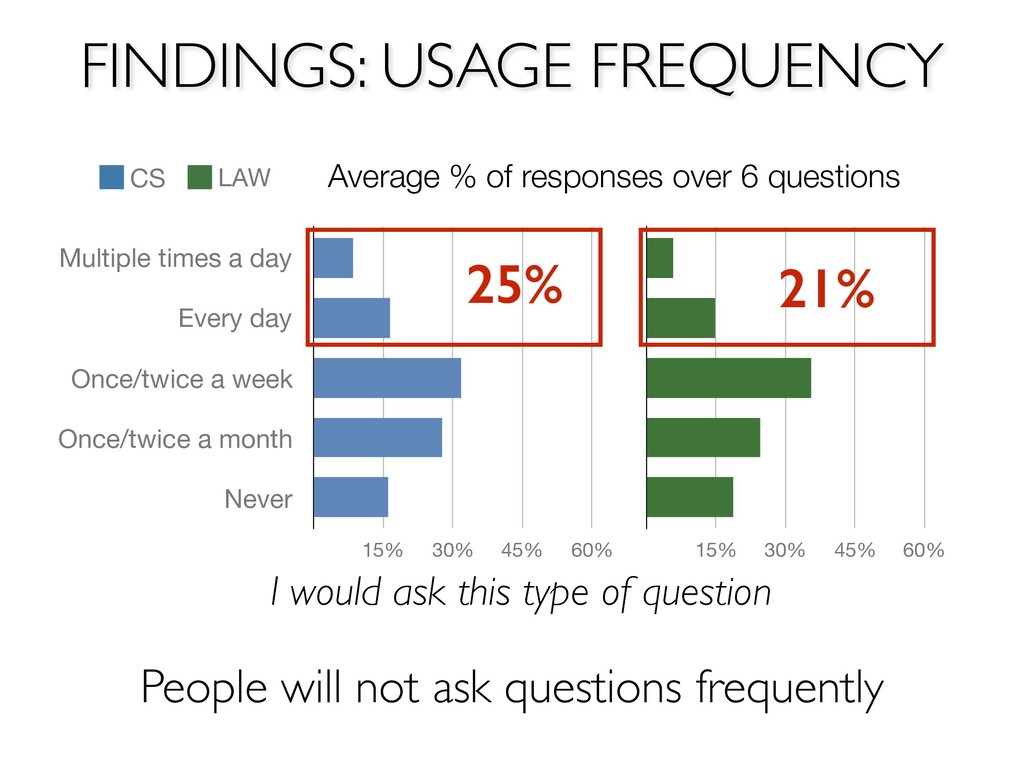
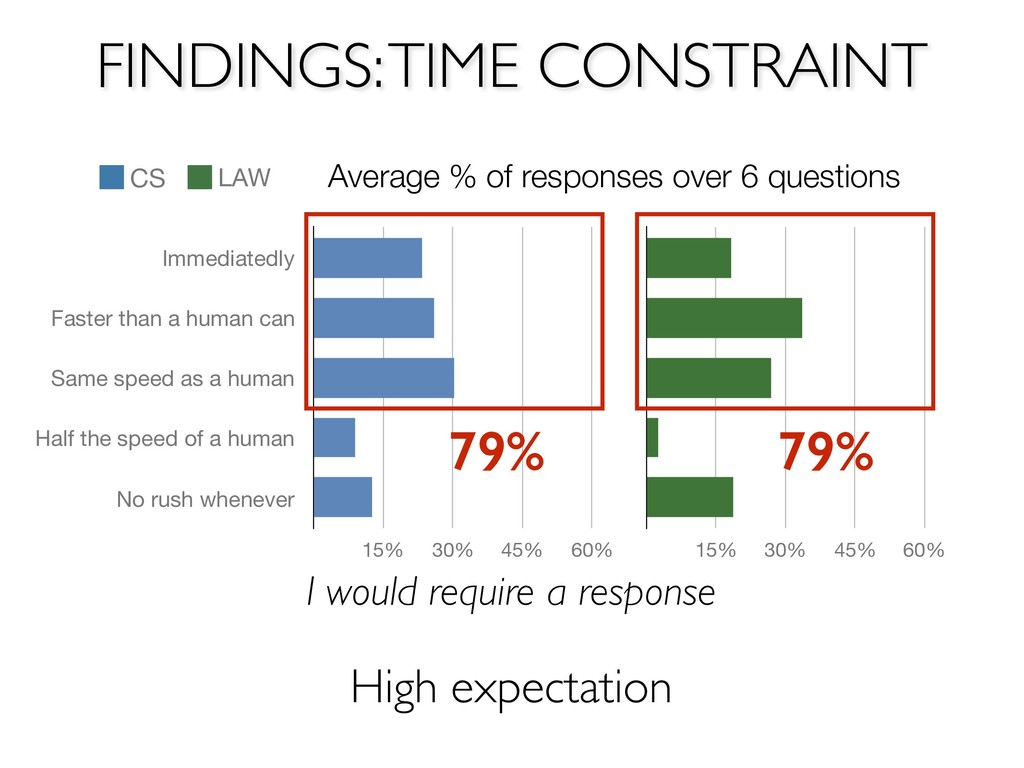
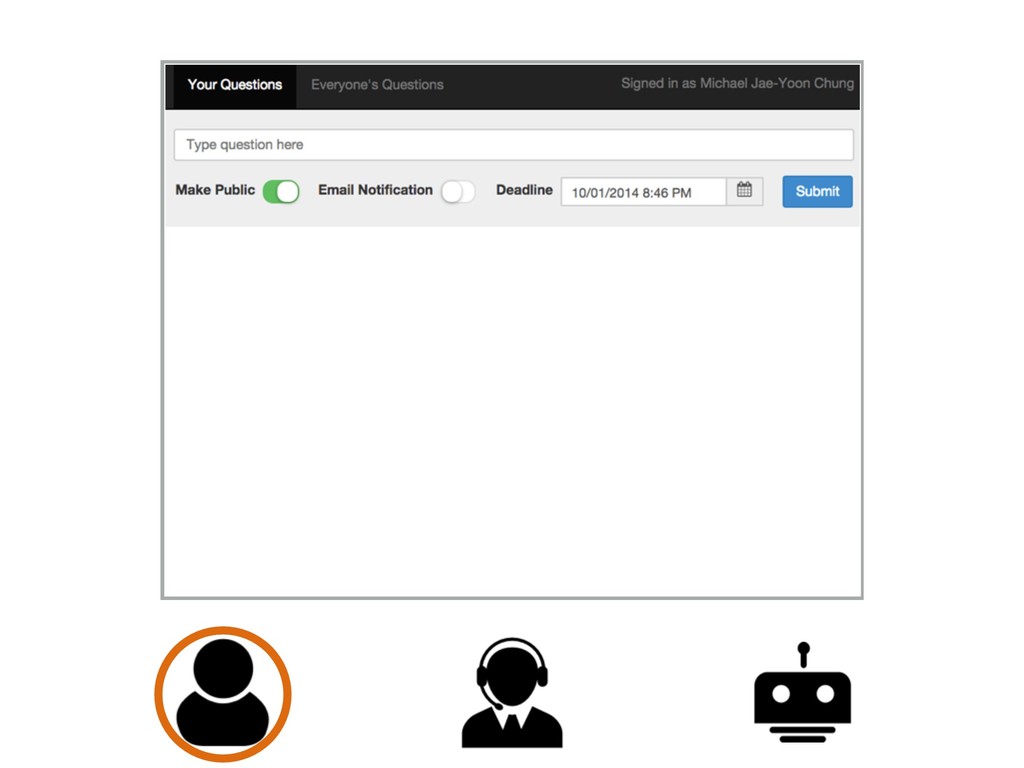
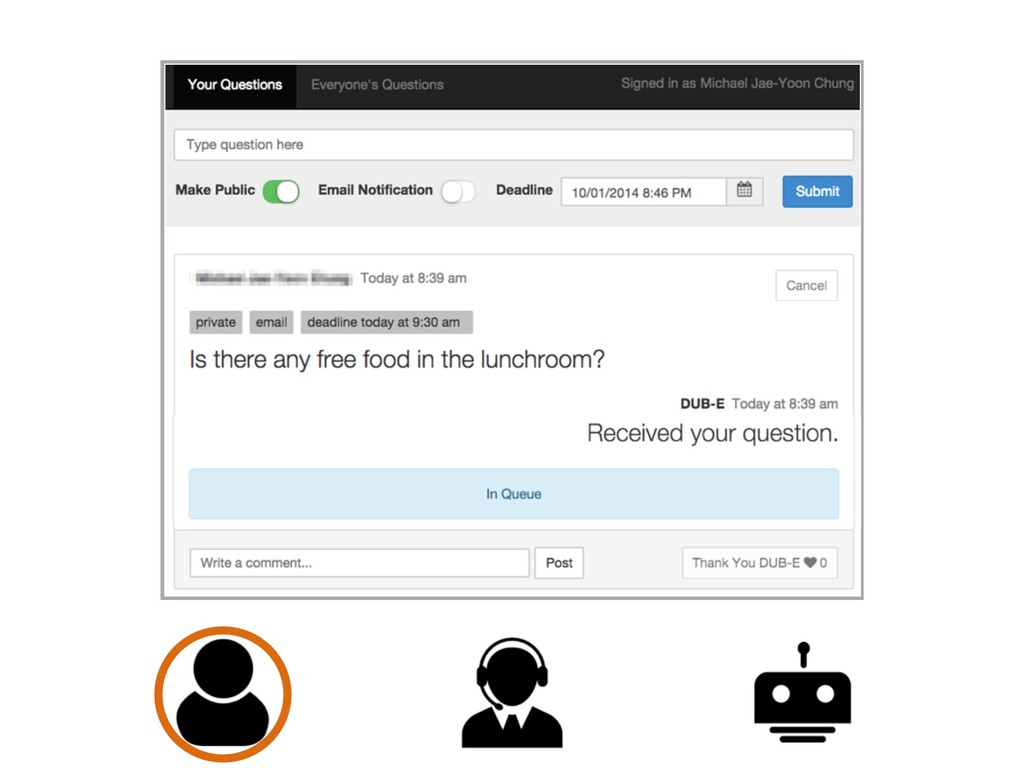
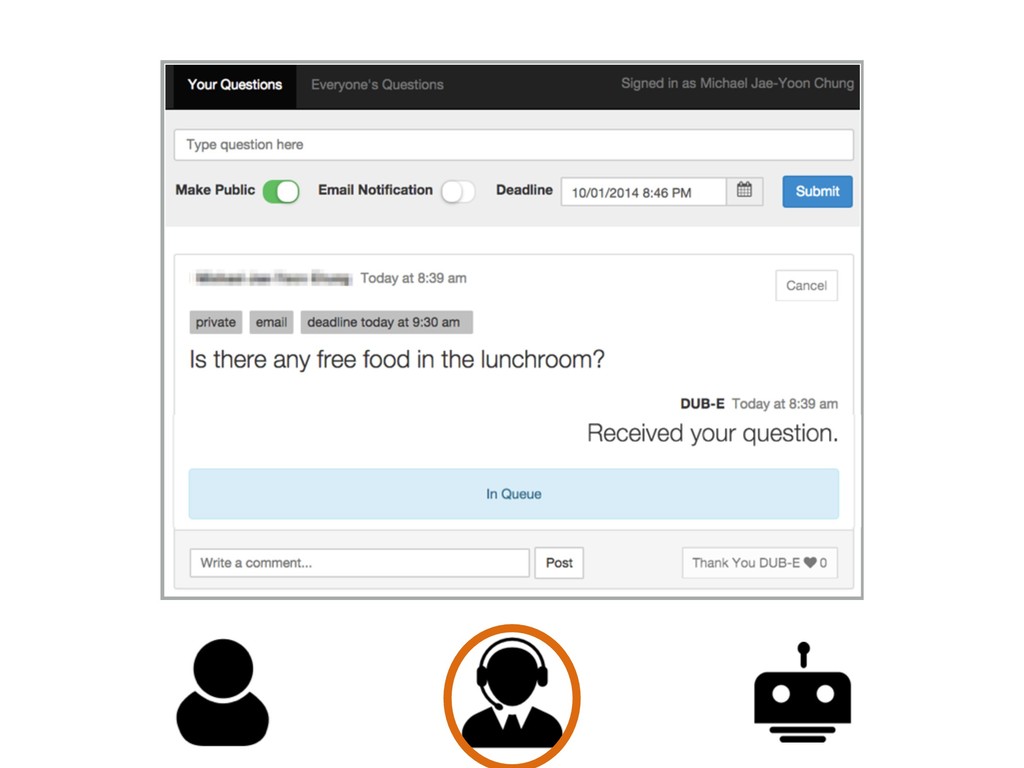
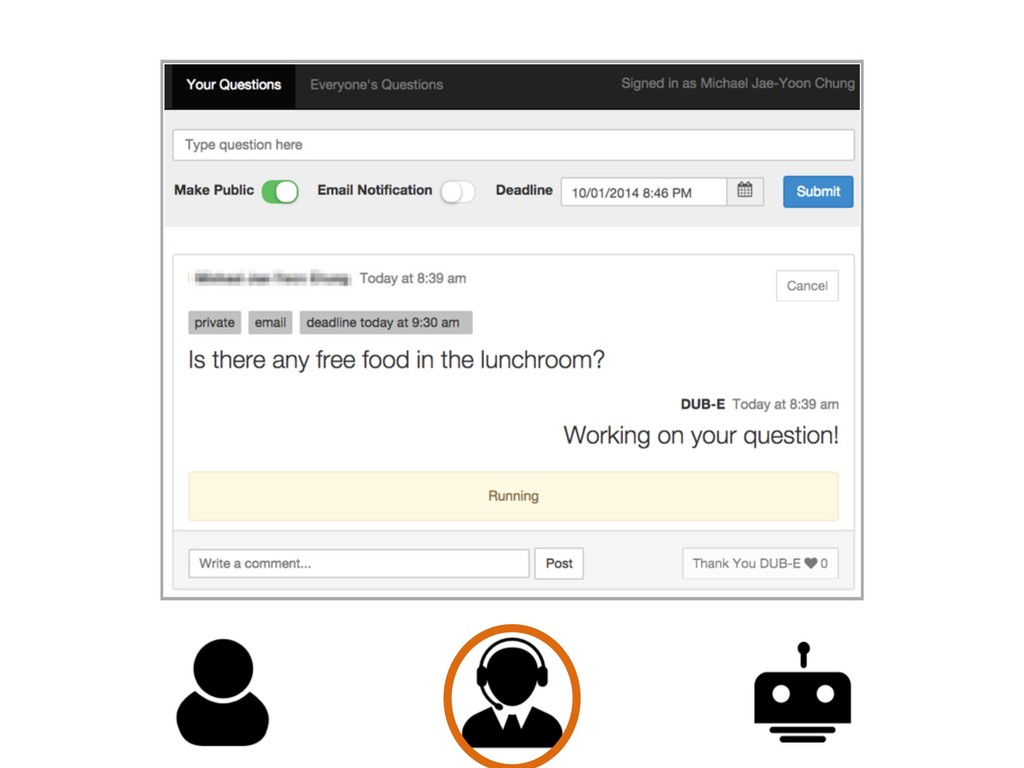
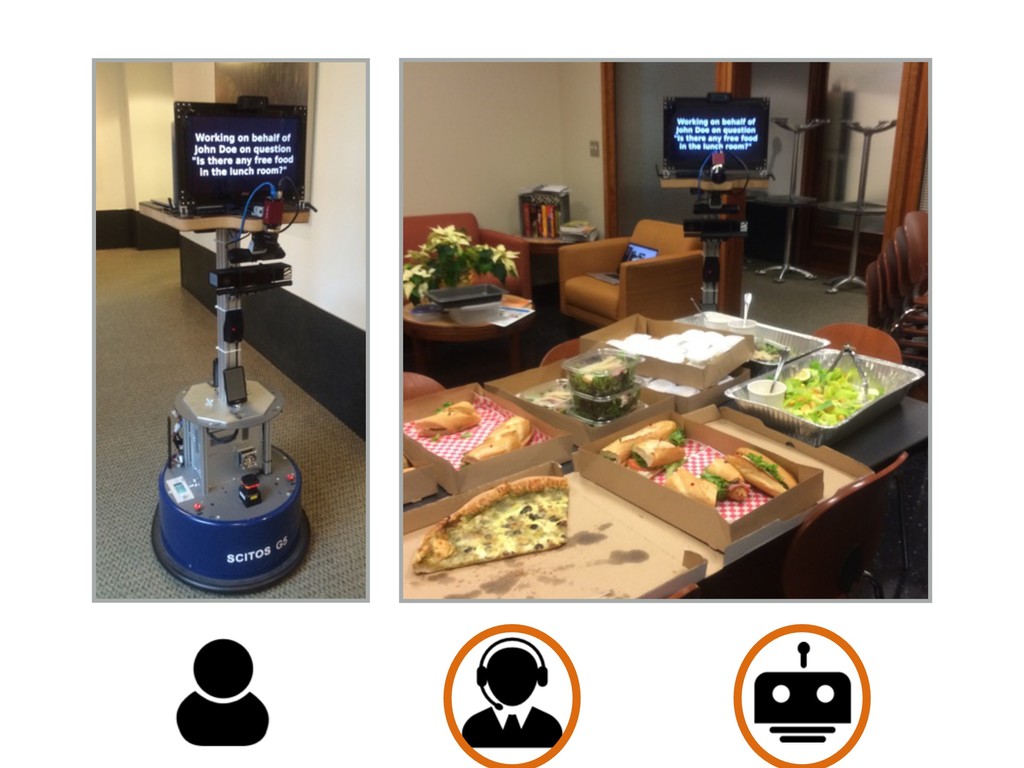
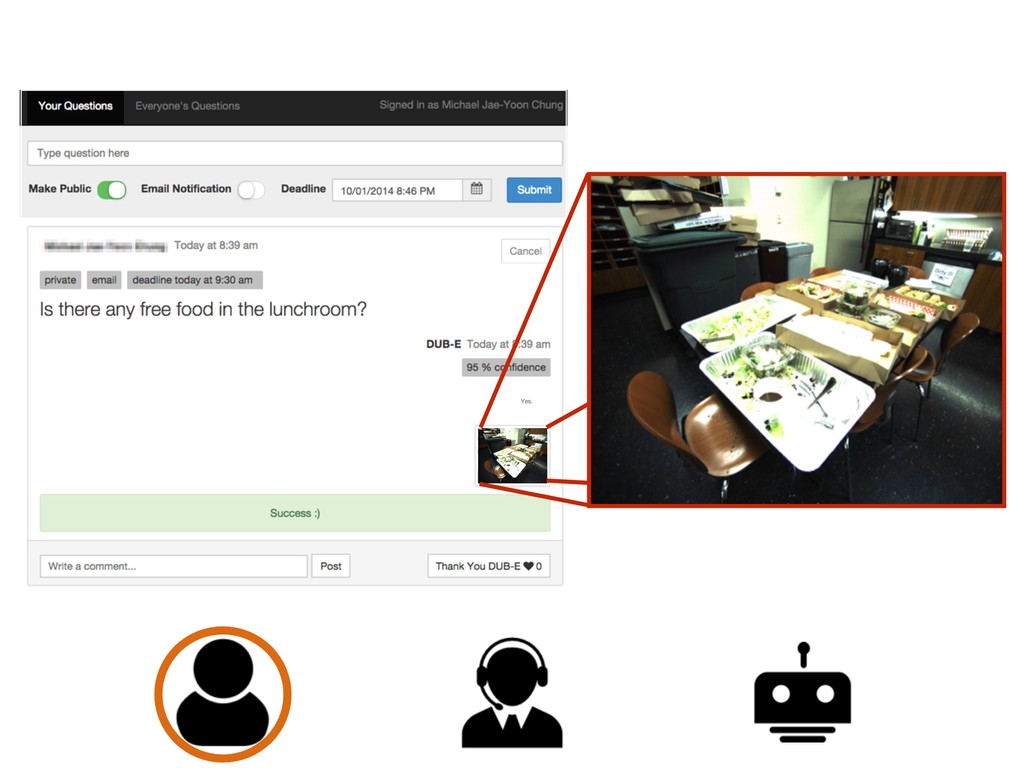
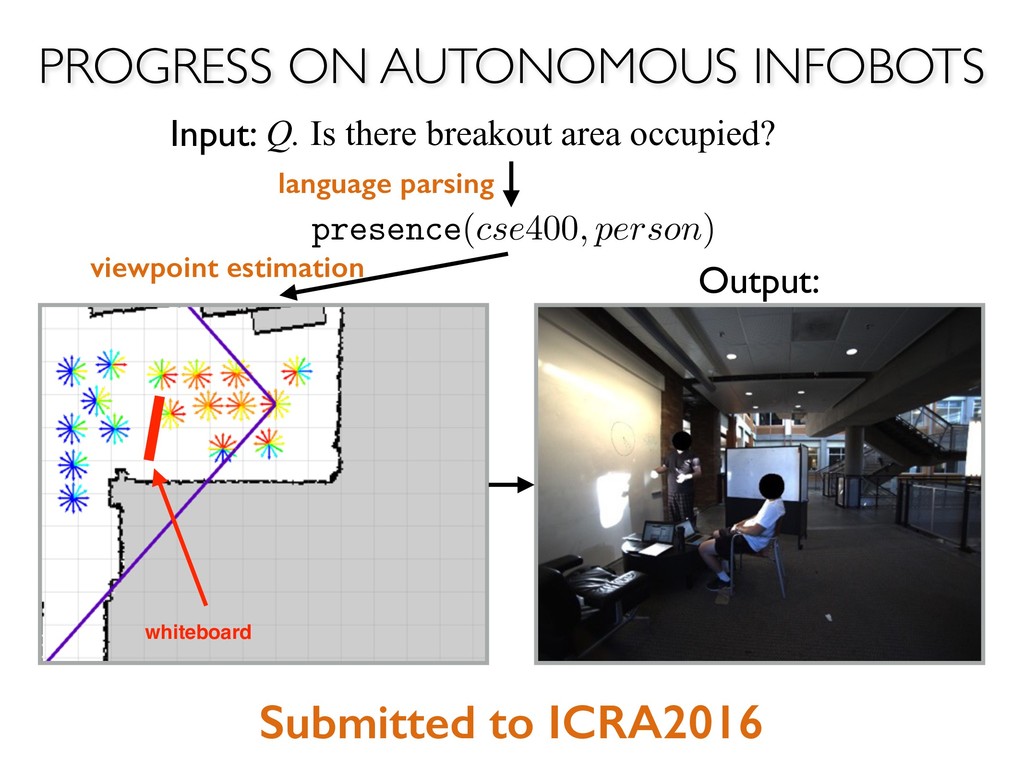
Abstract - Advances in mobile robotics have enabled robotsthat can autonomously operate in human-populated environments. Although primary tasks for such robots might be fetching, delivery, or escorting, they present an untapped potentialas information gathering agents that can answer questions forthe community of co-inhabitants. In this paper, we seek tobetter understand requirements for such information gatheringrobots (InfoBots) from the perspective of the user requestingthe information. We present findings from two studies: (i) a usersurvey conducted in two office buildings and (ii) a 4-day longdeployment in one of the buildings, during which inhabitantsof the building could ask questions to an InfoBot through aweb-based interface. These studies allow us to characterize thetypes of information that InfoBots can provide for their users.
For details, see https://www.researchgate.net/publication/308819532_Designing_information_gathering_robots_for_human-populated_environments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}