como vetores-livres. • Forças e matrizes-coluna. • O conceito abstrato de Espaço Vetorial. • O espaço vetorial das matrizes mxn. • Vetores-linha e vetores-coluna. • Flops. Eis um resumo da revisão de Cálculo Vetorial que veremos:
de algodão e um grão de arroz, ambos com 1 grama. Você está errado Aristóteles! Eu mostro, nos “Diálogos” que os objetos caem com a mesma aceleração, a menos que a resistência do ar ou alguma outra força os freie.
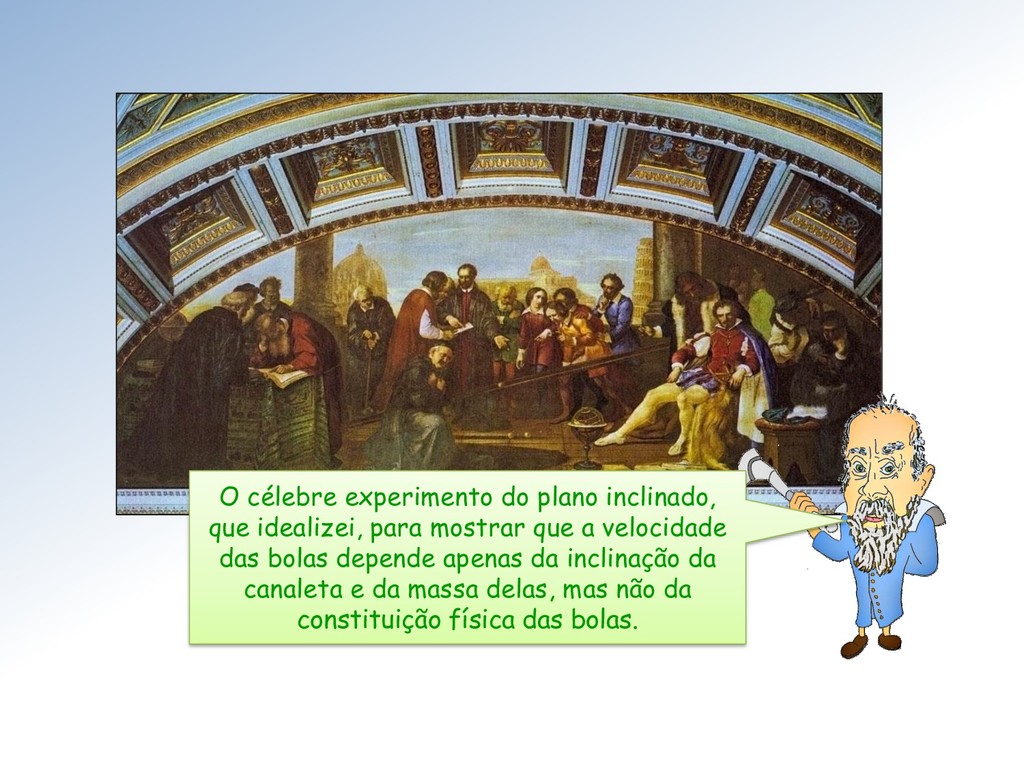
plano inclinado o espaço a percorrer é maior que na vertical, Loirinha. Assim fica mais fácil perceber a diferença nos tempos de percurso para bolas de massas diferentes ou para inclinações distintas!
movendi uniformiter in directum, nisi quatenus a viribus impressis cogitur statum illum mutare. Lei I: Todo corpo continua em seu estado de repouso ou de movimento uniforme em uma linha reta, a menos que seja forçado a mudar aquele estado por forças aplicadas sobre ele A lei da inércia
secundum lineam rectam qua vis illa imprimitur. Lei II: A mudança de movimento é proporcional à força motora imprimida, e é produzida na direção de linha reta na qual aquela força é imprimida. A lei da quantidade de movimento.
corporum duorum actiones in se mutuo semper esse aequales et in partes contrarias dirigi. Lei III: A toda ação há sempre uma reação oposta e de igual intensidade: ou as ações mútuas de dois corpos um sobre o outro são sempre iguais e dirigidas em sentidos opostos. A lei da ação e reação.
fieri, eamque proportionalem esse quantitati materia in singulus. Propositio VIII. Theorema VIII. Liber Tertius: Si Globorum duorum in se mutuò gravitantium materia undique, in regionibus que à centris equalier distant, homogenia sit: erit pondus Globi alterutrius in alterum reciprocè ut quadratum distantia inter centra. A forma original na qual a lei da gravitação universal foi escrita é a seguinte:
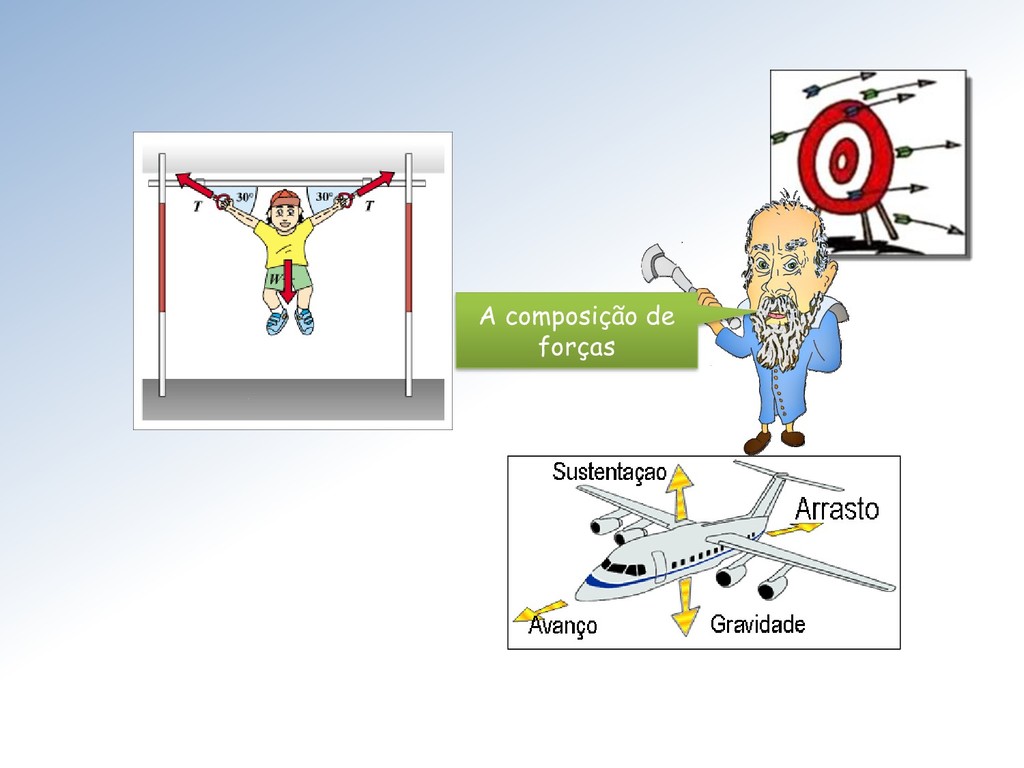
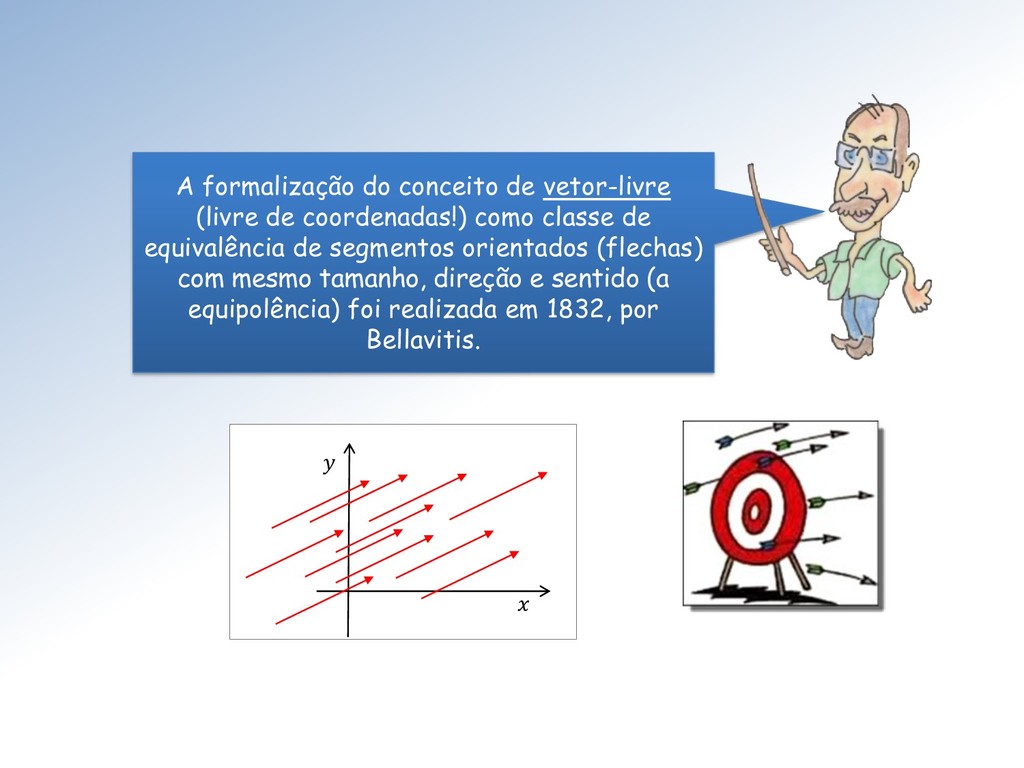
Possuem direção, sentido e magnitude. Normalmente são aplicadas num ponto específico de um corpo – às vezes o centro de massa. O conceito de vetor-livre é extremamente utilizado em física e engenharias, por exemplo na composição de forças.
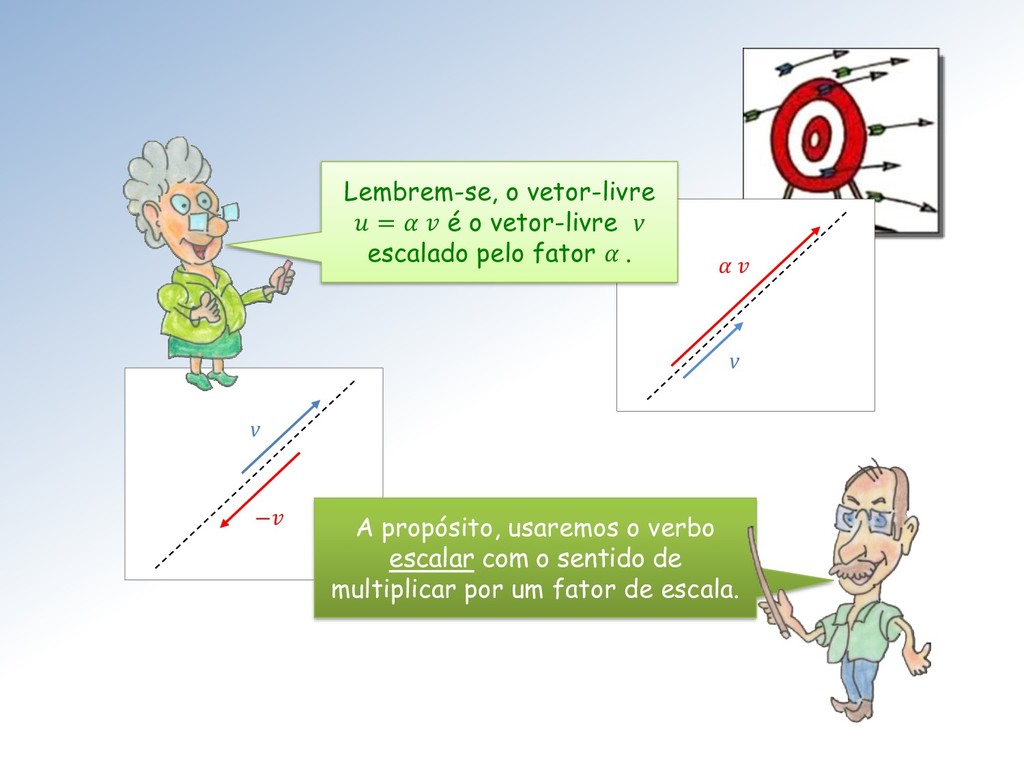
de forças. — A multiplicação de um vetor-livre por fator de escala, está associada a aumentar ou reduzir uma força; eventualmente equilibrá-la. As operações fundamentais com vetores-livre estão diretamente associadas ao conceito de força.
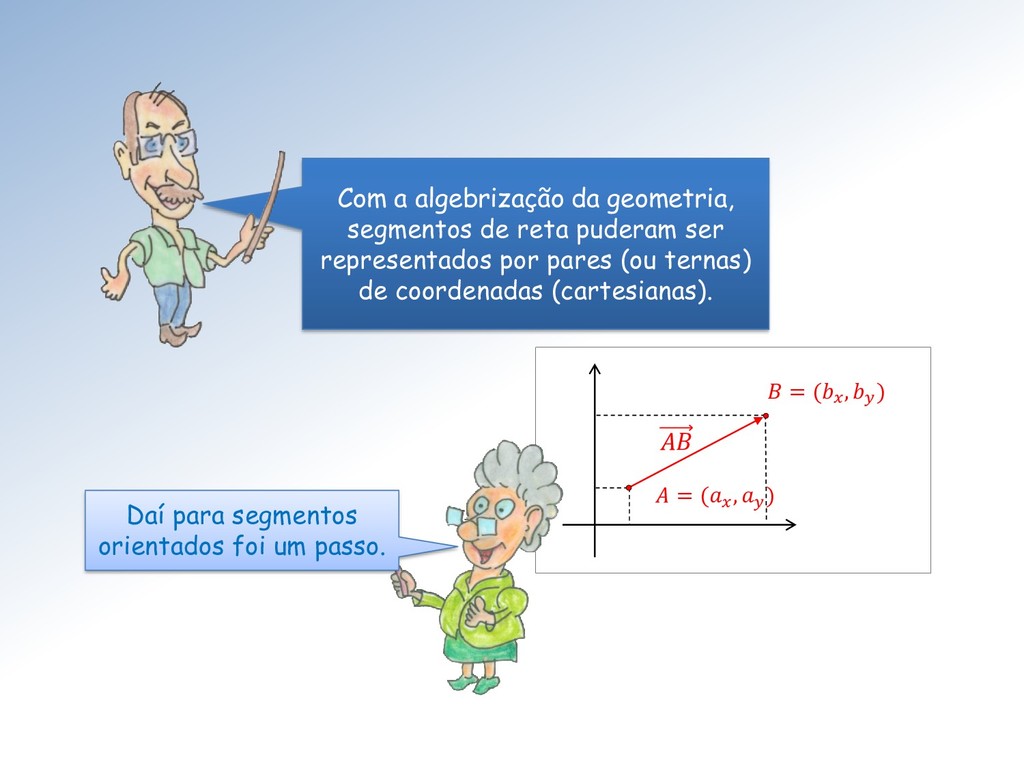
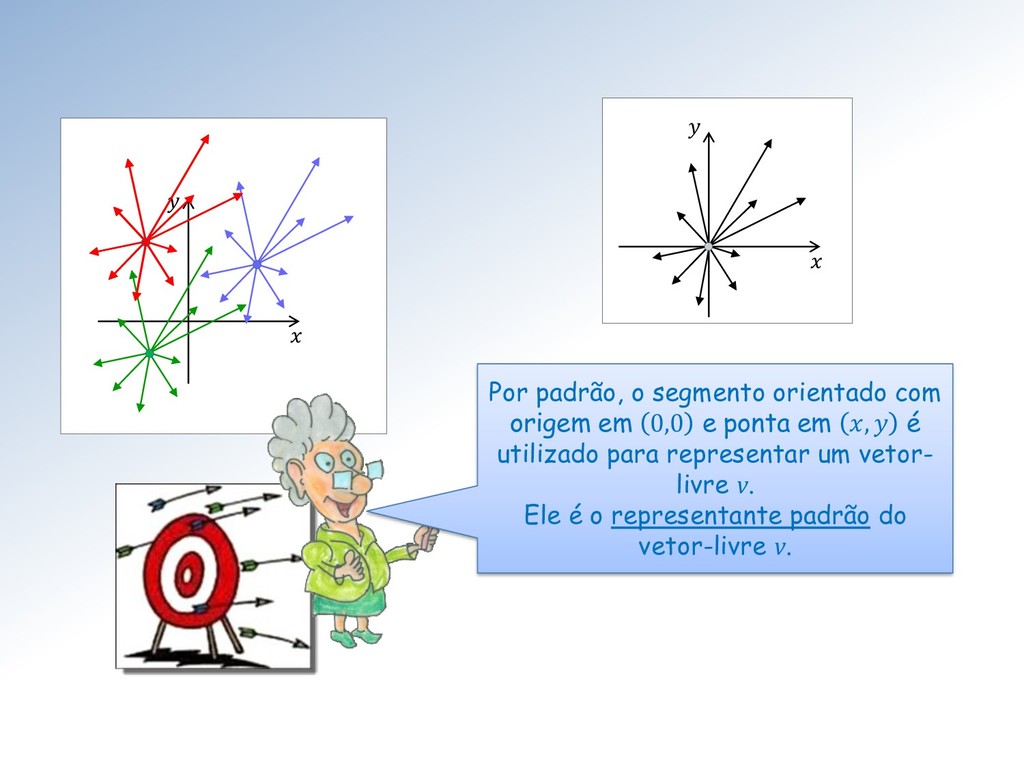
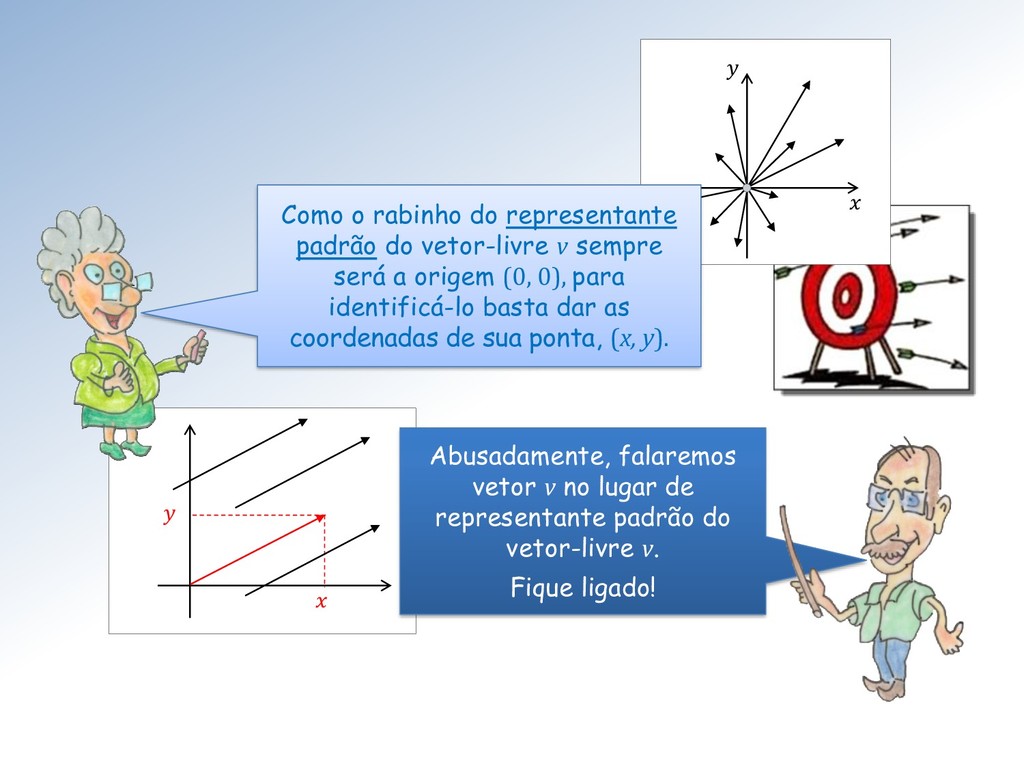
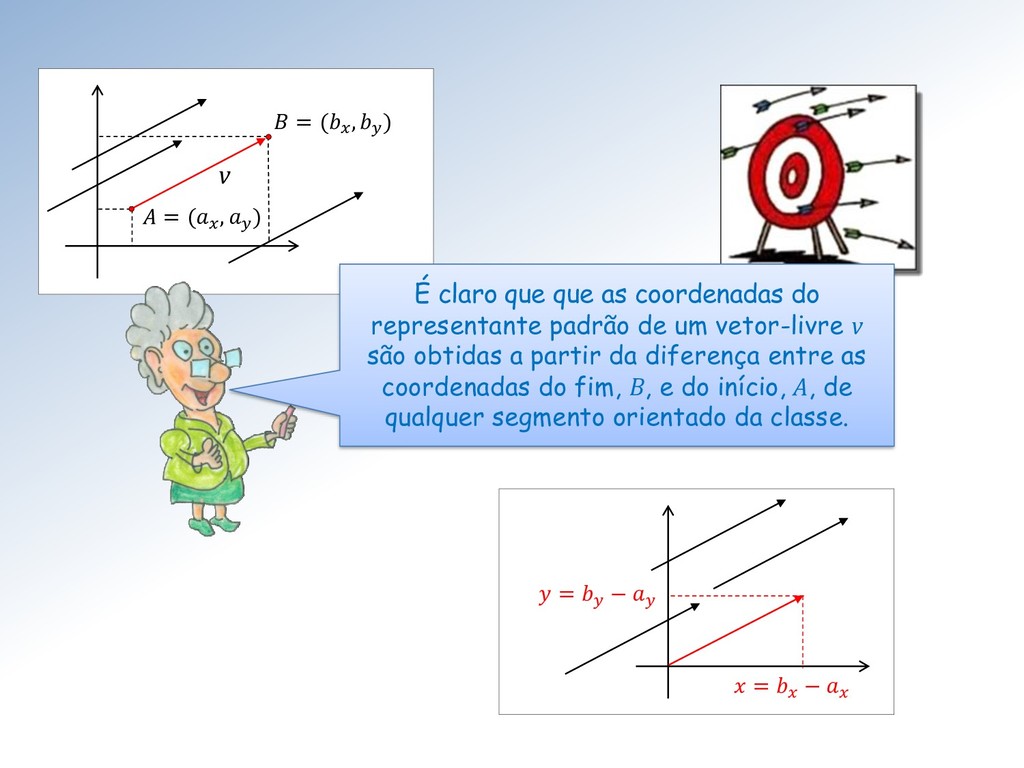
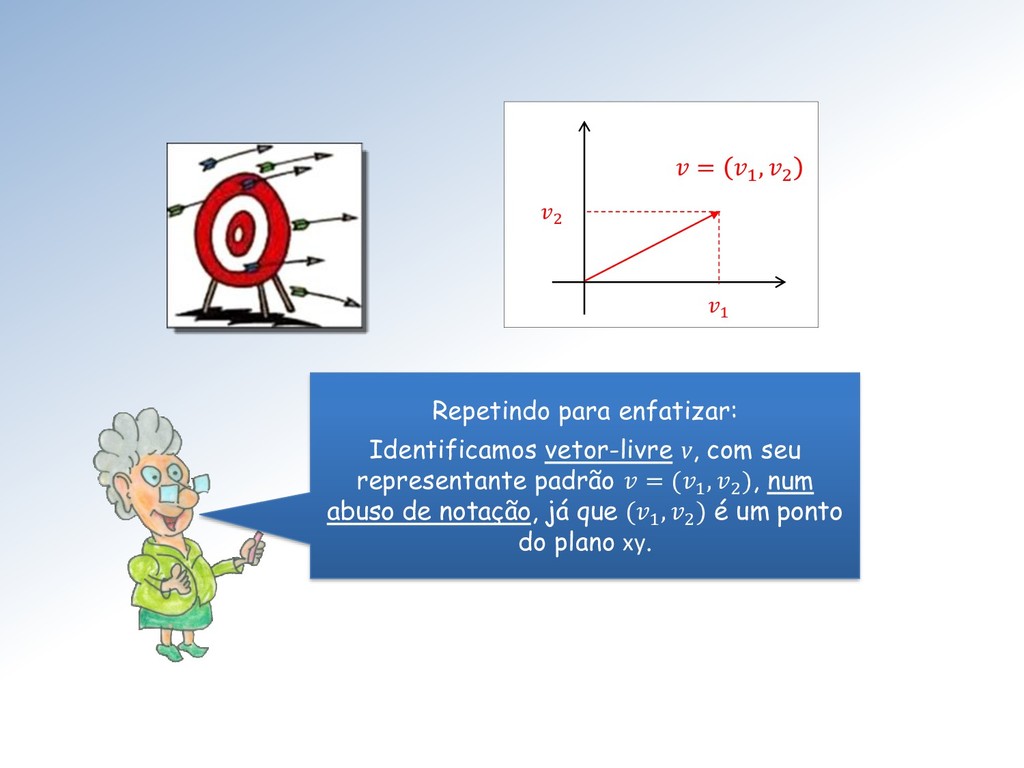
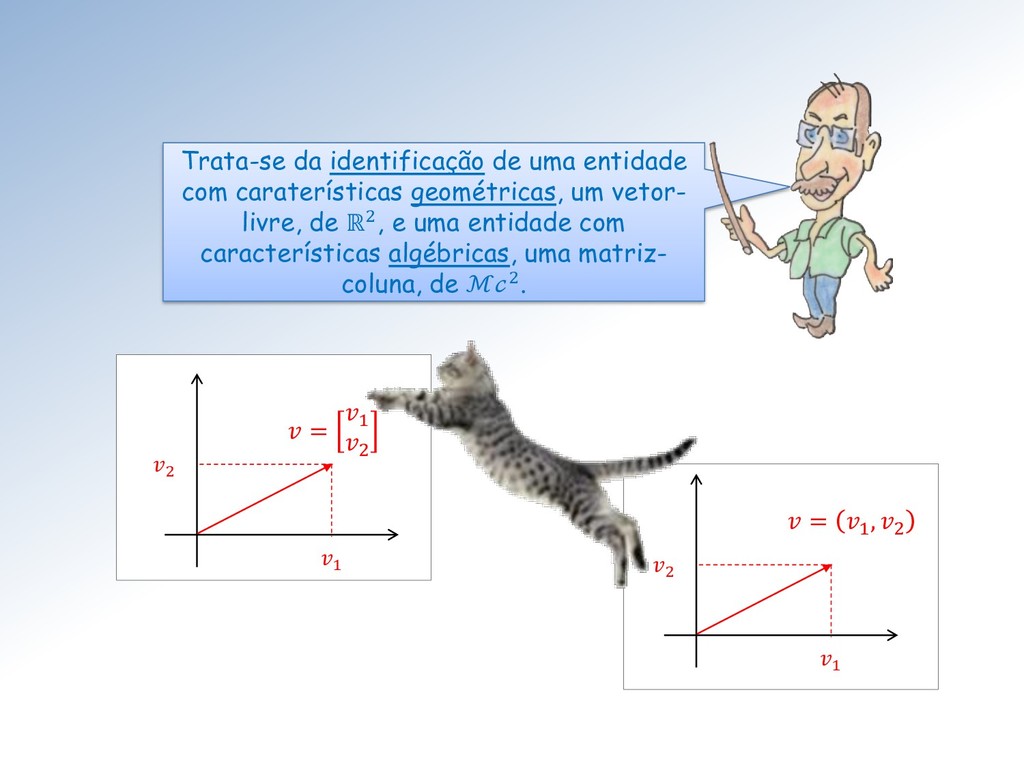
será a origem (0, 0), para identificá-lo basta dar as coordenadas de sua ponta, (x, y). Abusadamente, falaremos vetor v no lugar de representante padrão do vetor-livre v. Fique ligado!
( , ) É claro que que as coordenadas do representante padrão de um vetor-livre v são obtidas a partir da diferença entre as coordenadas do fim, B, e do início, A, de qualquer segmento orientado da classe.
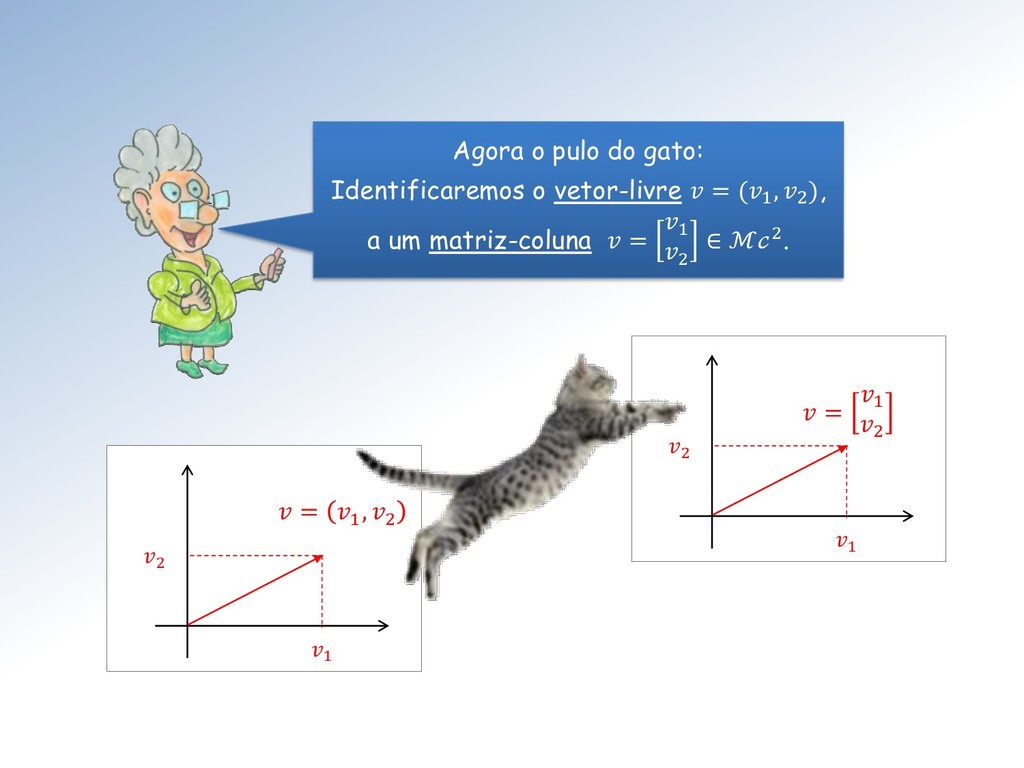
2 Trata-se da identificação de uma entidade com caraterísticas geométricas, um vetor- livre, de ℝ2, e uma entidade com características algébricas, uma matriz- coluna, de ℳ2.
vocês dois transportarão para matrizes-coluna tudo o que percebemos com nossos sentidos. Matrizes-coluna são do mundo das ideias. Já minha metade aristotélica acha ótimo estender a outros entes matemáticos nossa percepção euclidiana de distâncias e tamanhos, ângulos, a projeção de sombras...
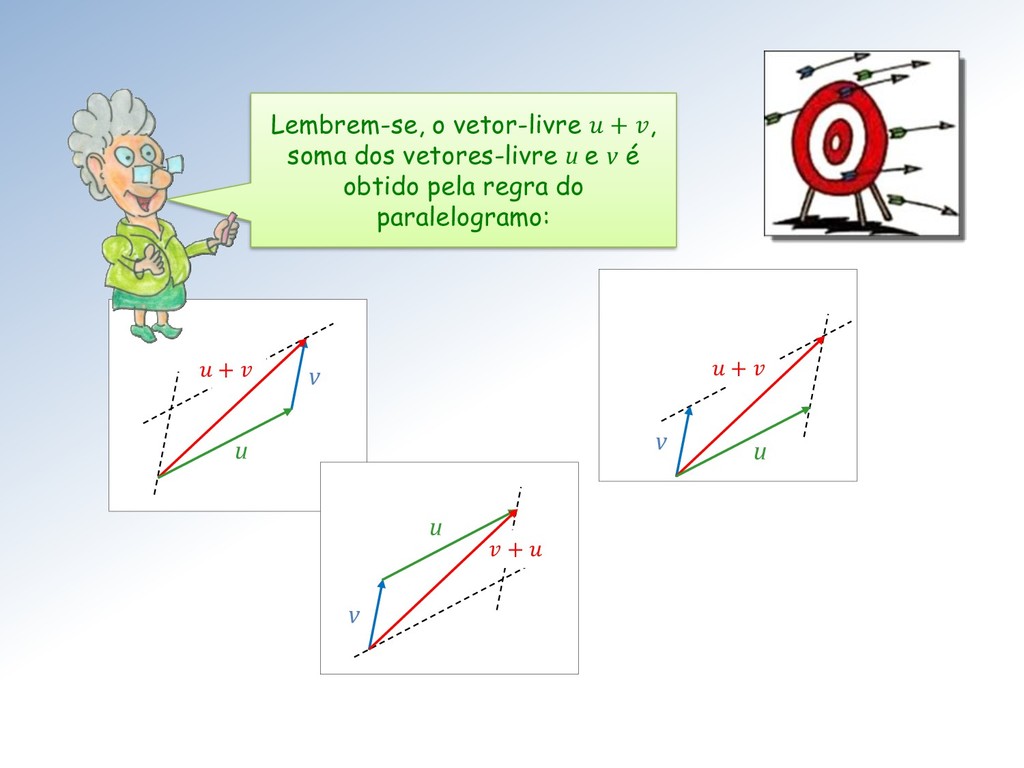
entre: • A adição de vetores-livre via regra do paralelogramo em ℝ2. • E, a adição de matrizes-coluna em ℳ2. E garantir também a correspondência entre: • A multiplicação de um vetor-livre em ℝ2 por um fator de escala • E, a multiplicação de uma matriz- coluna em ℳ2 por um número real.
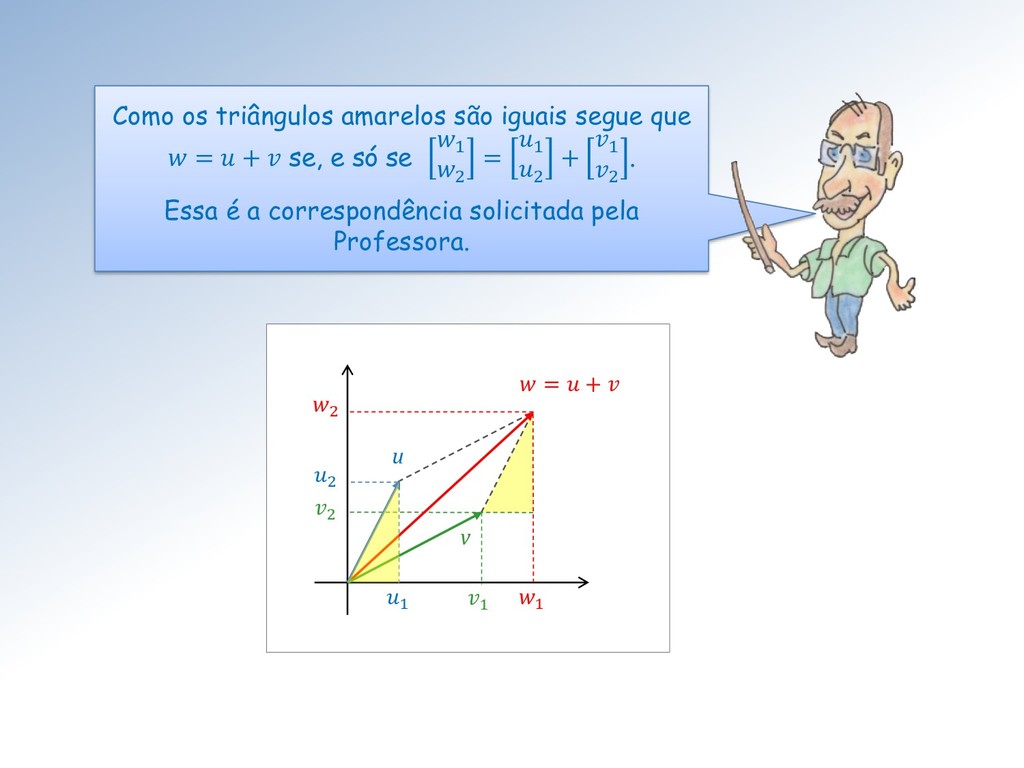
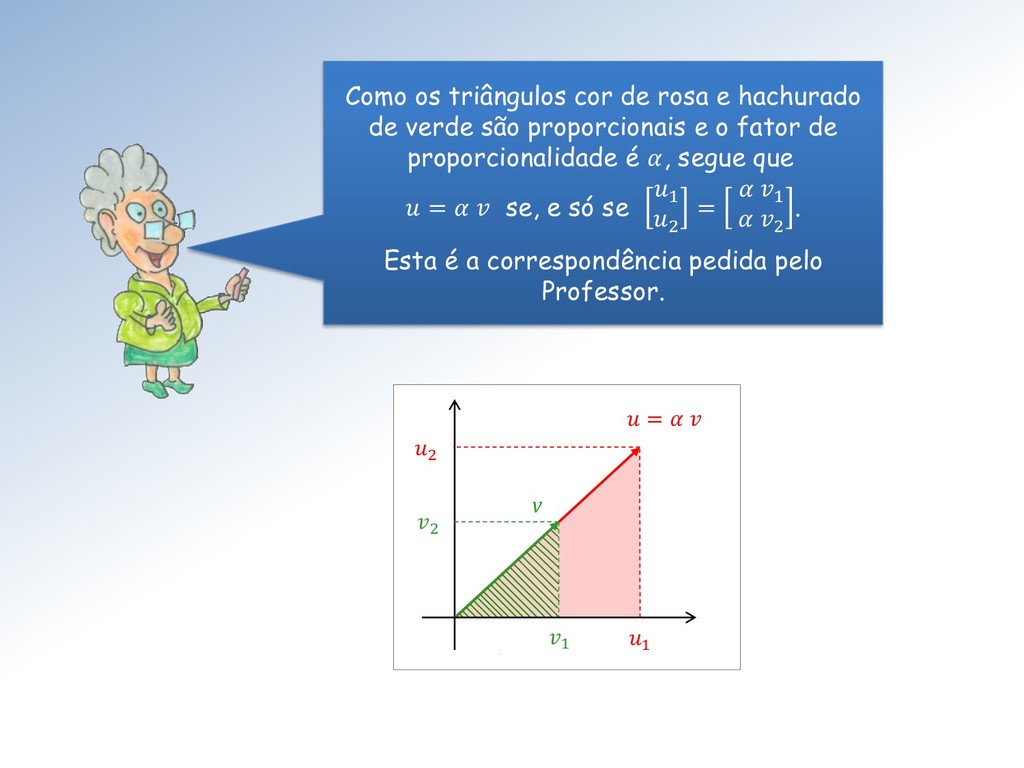
de rosa e hachurado de verde são proporcionais e o fator de proporcionalidade é , segue que = se, e só se 1 2 = 1 2 . Esta é a correspondência pedida pelo Professor.
1 2 entre vetores-livre e matrizes-coluna preserva a correspondência entre as operações de adição e multiplicação por fator de escala. Identificações que preservam operações, como essa, são importantíssimas e recebem o nome de isomorfismos.
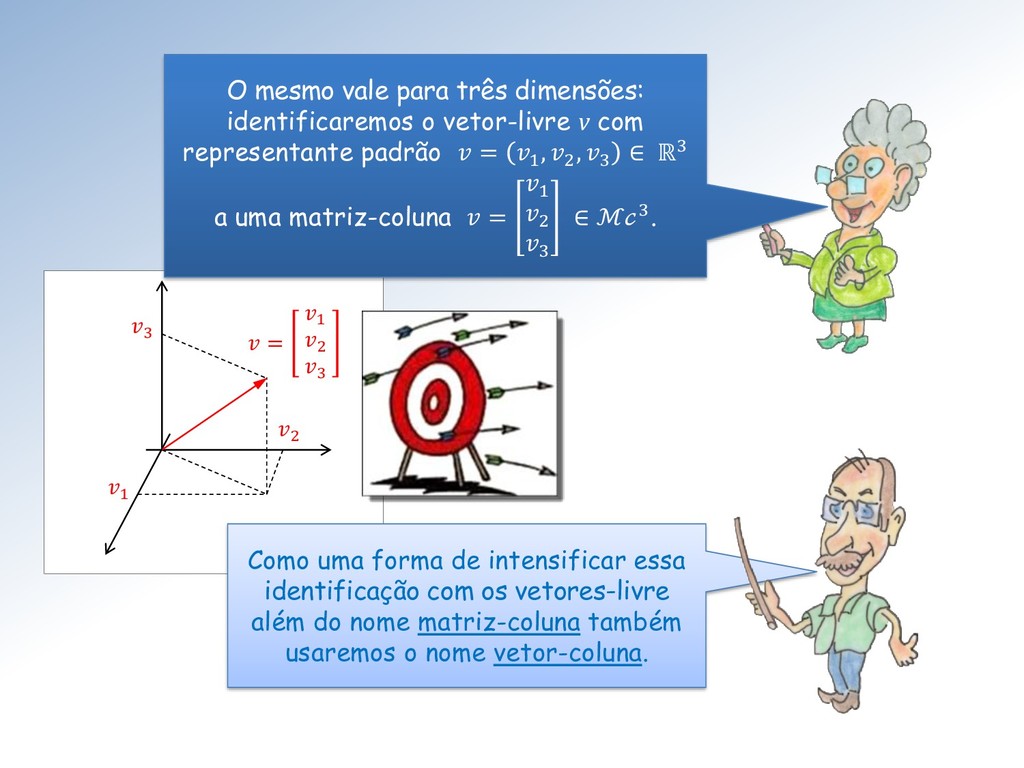
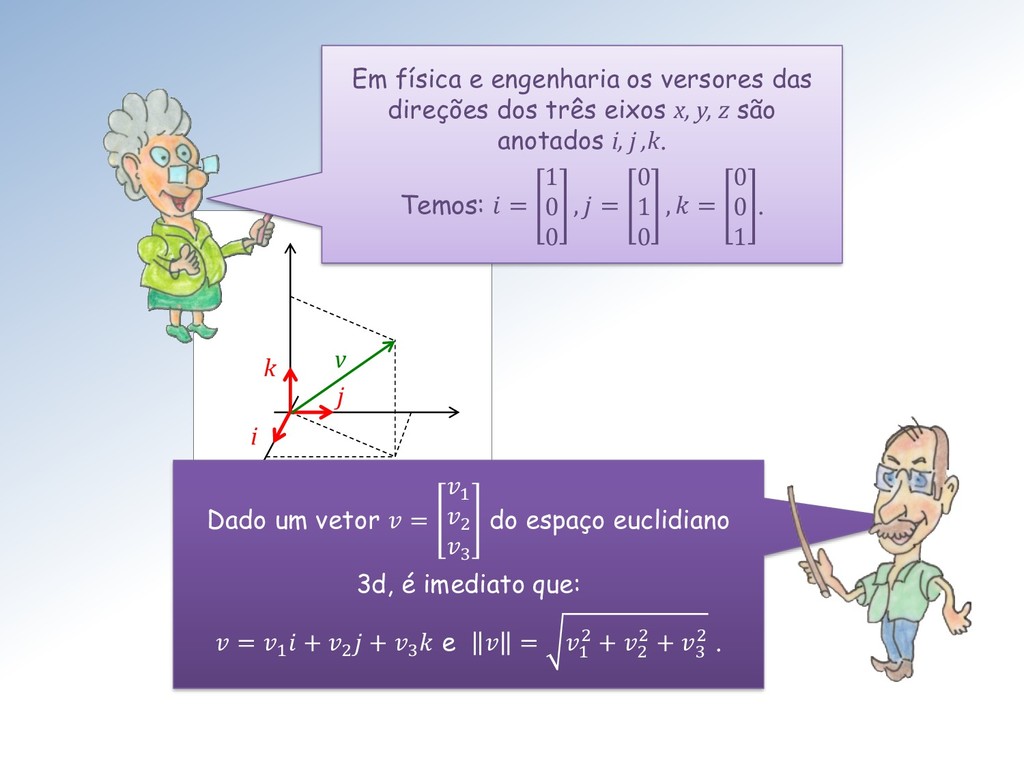
para três dimensões: identificaremos o vetor-livre v com representante padrão = 1 , 2 , 3 ∈ ℝ3 a uma matriz-coluna = 1 2 3 ∈ ℳ3. Como uma forma de intensificar essa identificação com os vetores-livre além do nome matriz-coluna também usaremos o nome vetor-coluna.
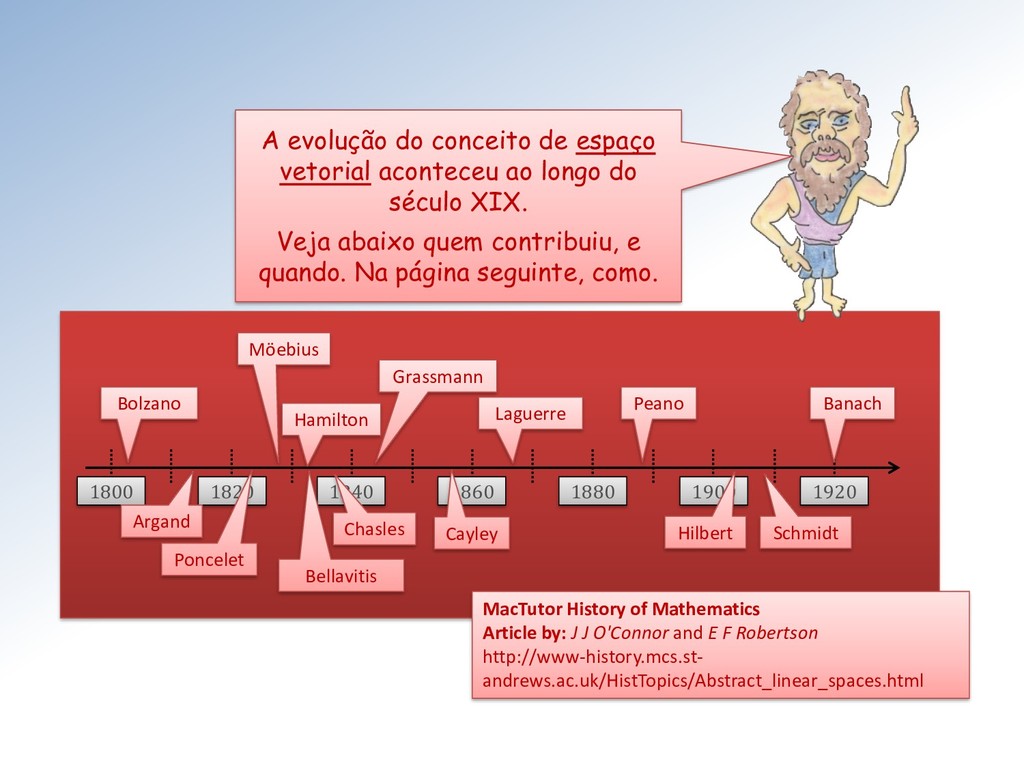
Möebius Grassmann Hilbert Peano Banach Schmidt Bellavitis Argand Cayley Laguerre Hamilton MacTutor History of Mathematics Article by: J J O'Connor and E F Robertson http://www-history.mcs.st- andrews.ac.uk/HistTopics/Abstract_linear_spaces.html A evolução do conceito de espaço vetorial aconteceu ao longo do século XIX. Veja abaixo quem contribuiu, e quando. Na página seguinte, como.
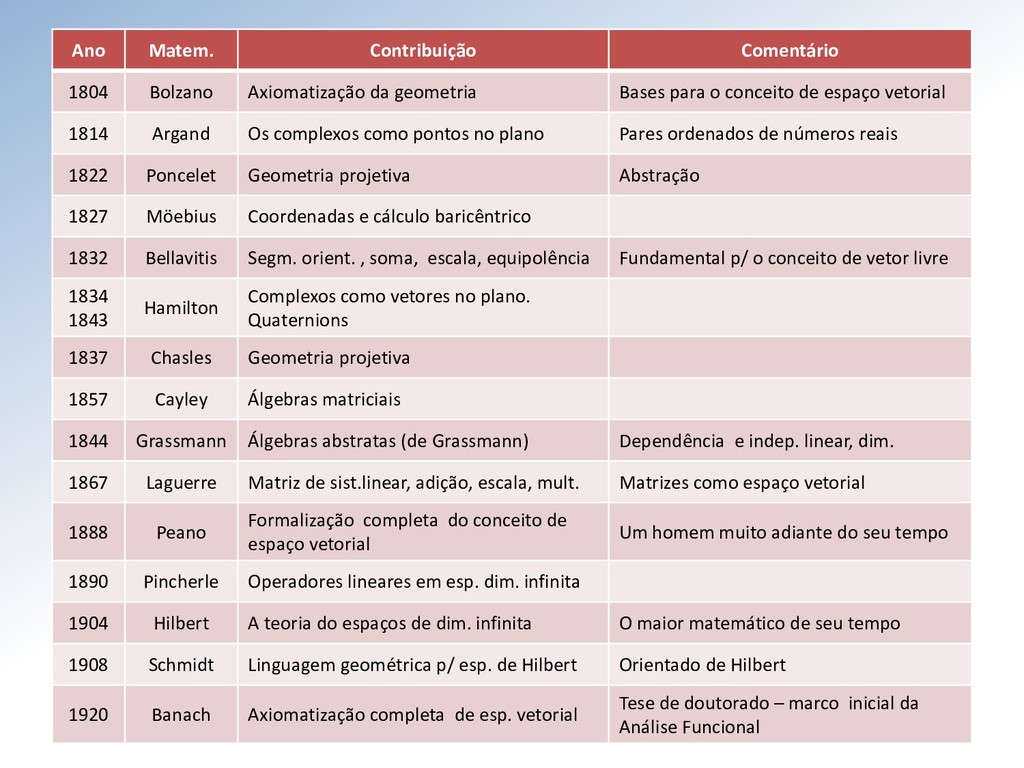
para o conceito de espaço vetorial 1814 Argand Os complexos como pontos no plano Pares ordenados de números reais 1822 Poncelet Geometria projetiva Abstração 1827 Möebius Coordenadas e cálculo baricêntrico 1832 Bellavitis Segm. orient. , soma, escala, equipolência Fundamental p/ o conceito de vetor livre 1834 1843 Hamilton Complexos como vetores no plano. Quaternions 1837 Chasles Geometria projetiva 1857 Cayley Álgebras matriciais 1844 Grassmann Álgebras abstratas (de Grassmann) Dependência e indep. linear, dim. 1867 Laguerre Matriz de sist.linear, adição, escala, mult. Matrizes como espaço vetorial 1888 Peano Formalização completa do conceito de espaço vetorial Um homem muito adiante do seu tempo 1890 Pincherle Operadores lineares em esp. dim. infinita 1904 Hilbert A teoria do espaços de dim. infinita O maior matemático de seu tempo 1908 Schmidt Linguagem geométrica p/ esp. de Hilbert Orientado de Hilbert 1920 Banach Axiomatização completa de esp. vetorial Tese de doutorado – marco inicial da Análise Funcional
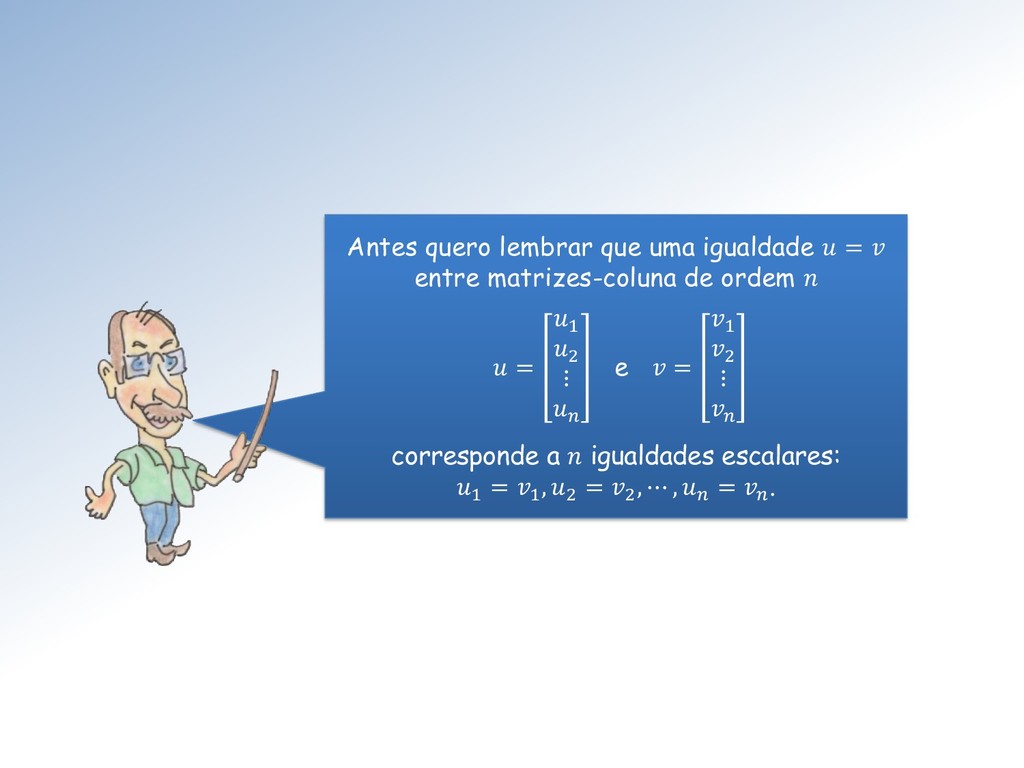
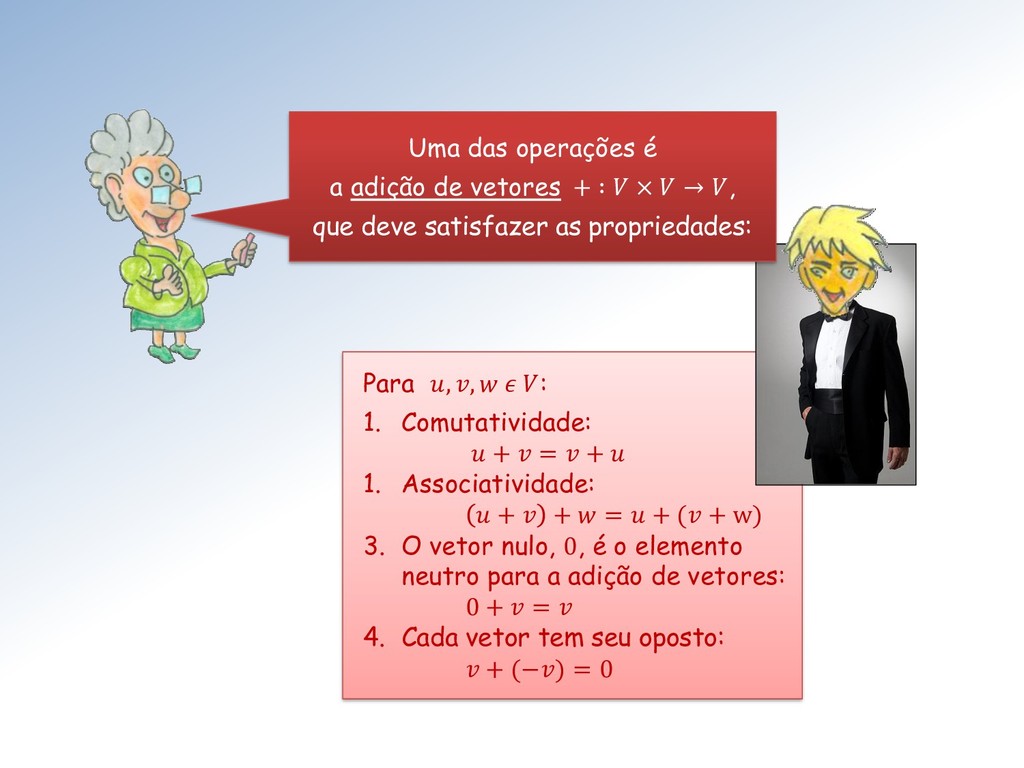
escalares serão números reais. Um espaço vetorial (, , +,∙ ) sobre um corpo (= ℝ ℂ) é uma estrutura algébrica constituída por um conjunto V, um corpo e duas operações, + ∙ . Os elementos de V são chamados vetores e os de escalares.
Associatividade: + + = + ( + w) 3. O vetor nulo, 0, é o elemento neutro para a adição de vetores: 0 + = 4. Cada vetor tem seu oposto: + (−) = 0 Uma das operações é a adição de vetores + ∶ × → , que deve satisfazer as propriedades:
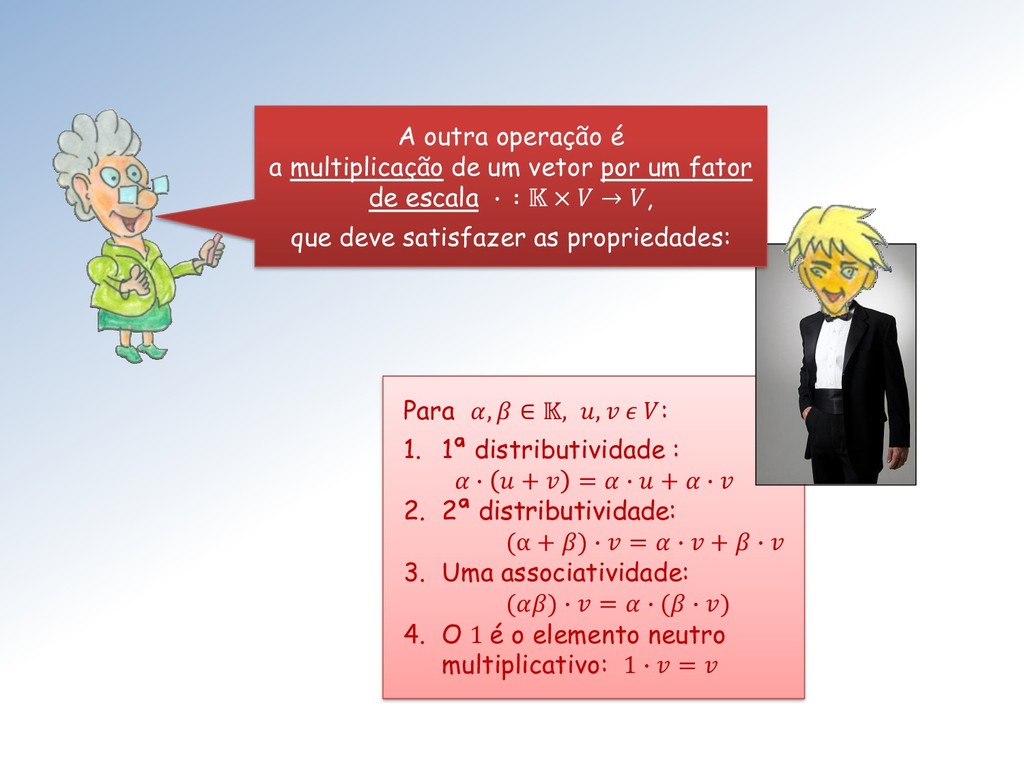
∙ + = ∙ + ∙ 2. 2ª distributividade: (α + ) ∙ = ∙ + ∙ 3. Uma associatividade: () ∙ = ∙ ( ∙ ) 4. O 1 é o elemento neutro multiplicativo: 1 ∙ = A outra operação é a multiplicação de um vetor por um fator de escala ∙ ∶ × → , que deve satisfazer as propriedades:
tanto de ℝ como de ℂ satisfazem as oito propriedades enunciadas pela Mestra na definição de espaço vetorial. Portanto posso afirmar que os vetores coluna de ordem n constituem um espaço vetorial.
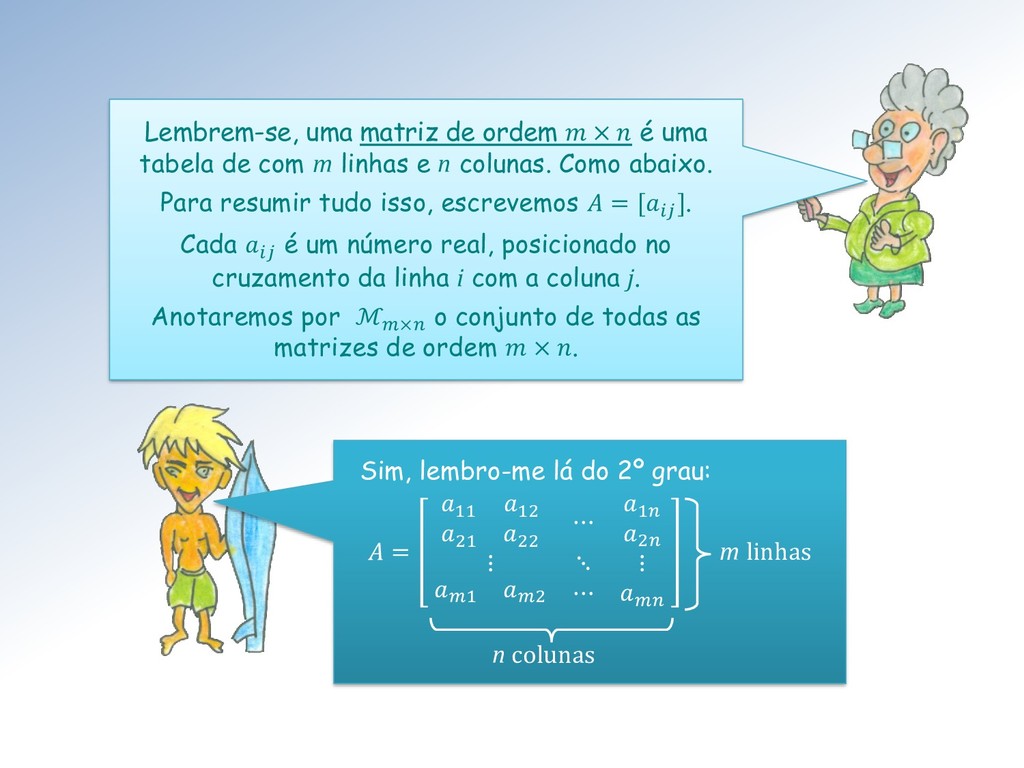
com m linhas e n colunas. Como abaixo. Para resumir tudo isso, escrevemos = [ ]. Cada é um número real, posicionado no cruzamento da linha i com a coluna j. Anotaremos por ℳ× o conjunto de todas as matrizes de ordem × . Sim, lembro-me lá do 2º grau: = 11 12 21 22 ⋯ 1 2 ⋮ ⋱ ⋮ 1 2 ⋯ m linhas n colunas
números reais. Só falta verificar que elas satisfazem as oito propriedades. Vetores são “apenas” entidades abstratas (objetos, coisas, ...) que podem ser somadas e escaladas. E precisam cumprir as oito propriedades listadas na definição.
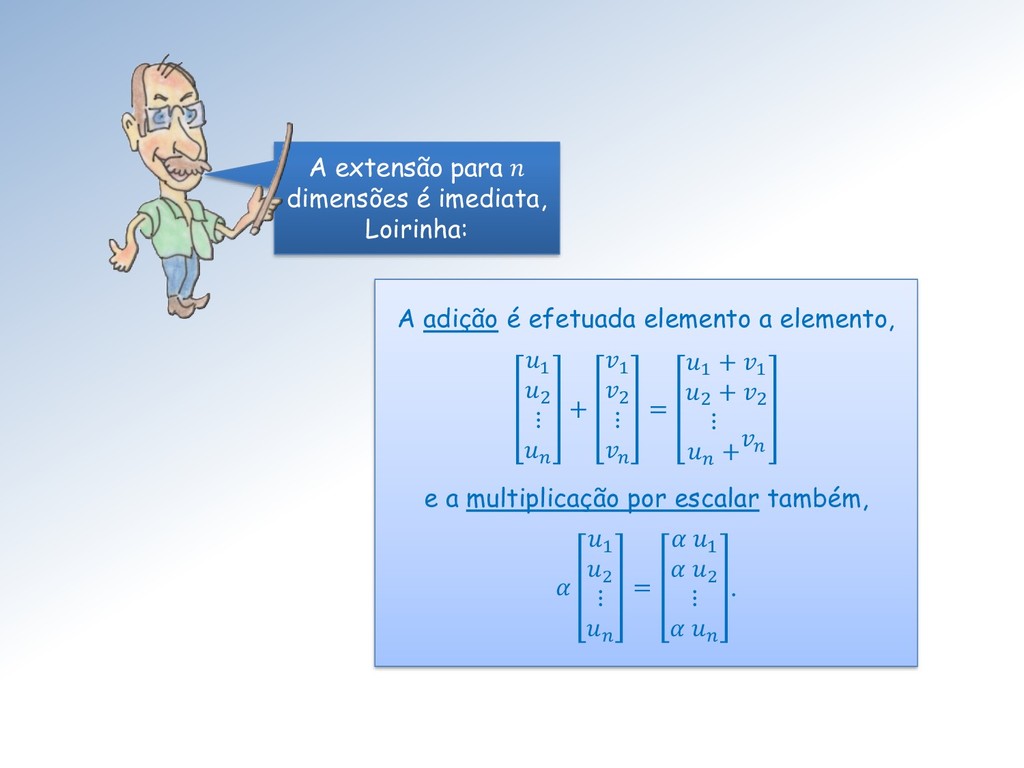
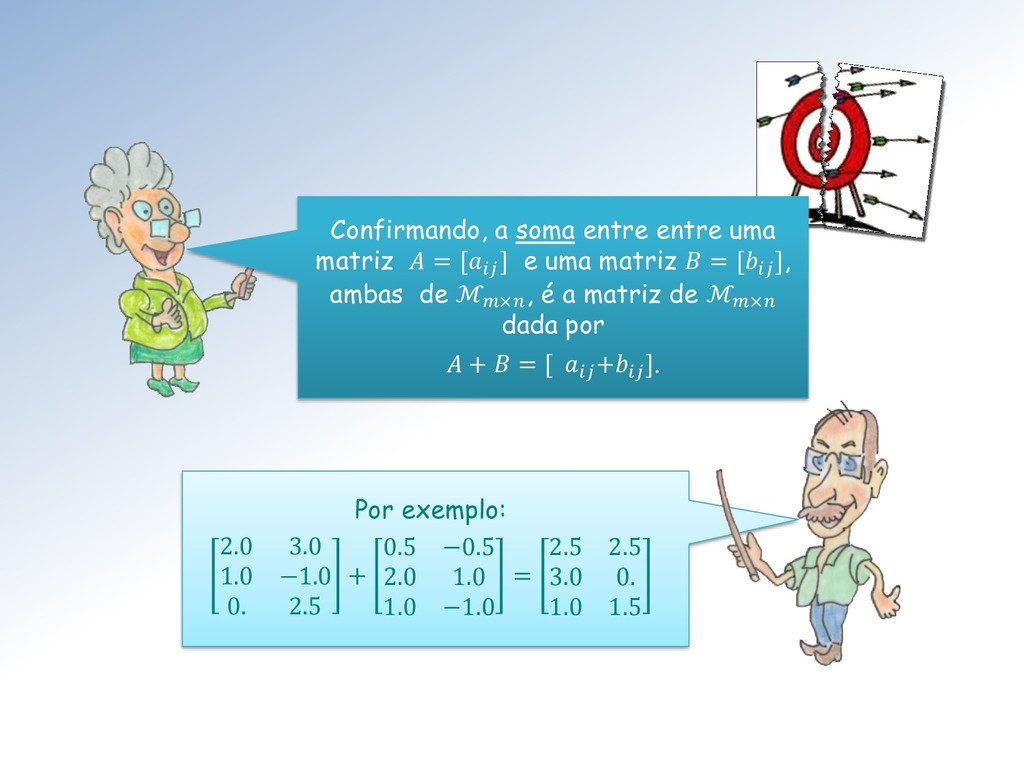
−0.5 2.0 1.0 1.0 −1.0 = 2.5 2.5 3.0 0. 1.0 1.5 Confirmando, a soma entre entre uma matriz = [ ] e uma matriz = [ ], ambas de ℳ× , é a matriz de ℳ× dada por + = [ + ].
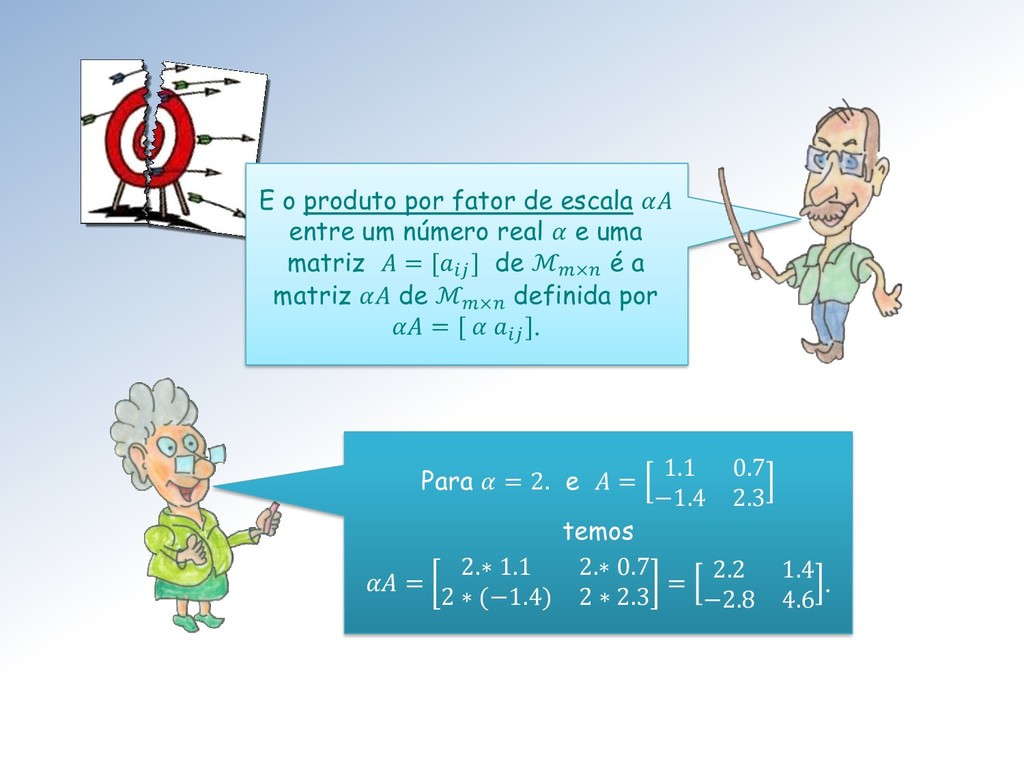
= 2.∗ 1.1 2.∗ 0.7 2 ∗ (−1.4) 2 ∗ 2.3 = 2.2 1.4 −2.8 4.6 . E o produto por fator de escala entre um número real e uma matriz = [ ] de ℳ× é a matriz de ℳ× definida por = [ ].
com matrizes de ℳ× e números reais satisfazem as oito regras da definição de espaço vetorial. Surfista, sobrou para você! Confira a afirmação do Sherlock.
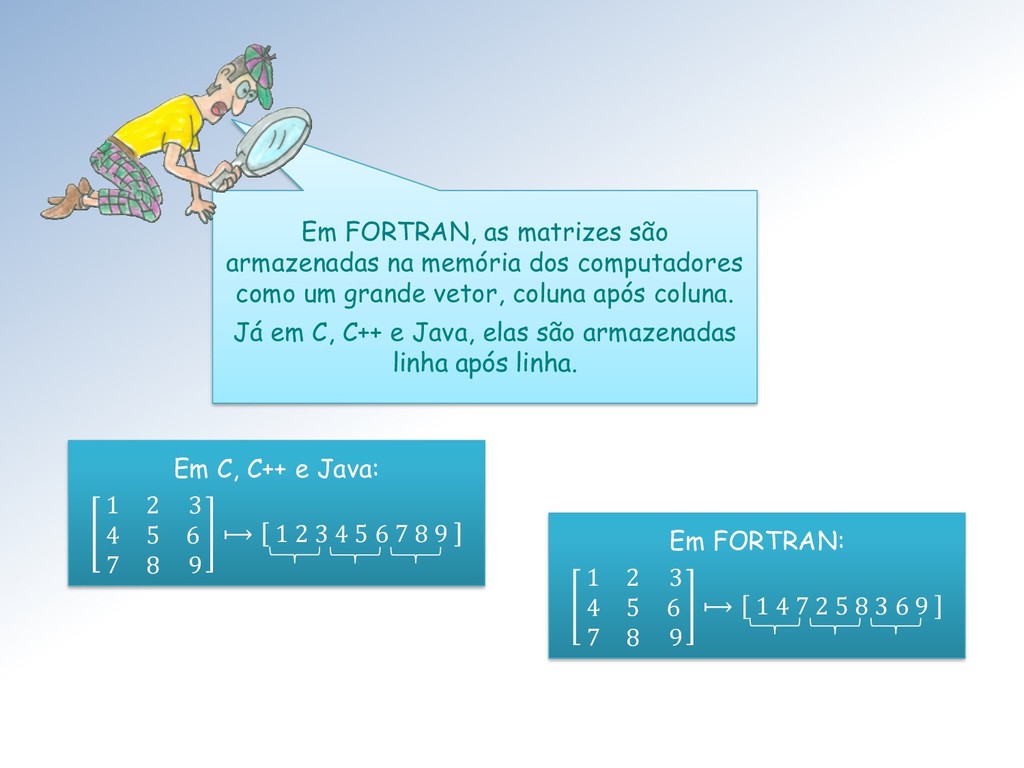
como um grande vetor, coluna após coluna. Já em C, C++ e Java, elas são armazenadas linha após linha. Em C, C++ e Java: 1 2 3 4 5 6 7 8 9 ⟼ 1 2 3 4 5 6 7 8 9 Em FORTRAN: 1 2 3 4 5 6 7 8 9 ⟼ 1 4 7 2 5 8 3 6 9
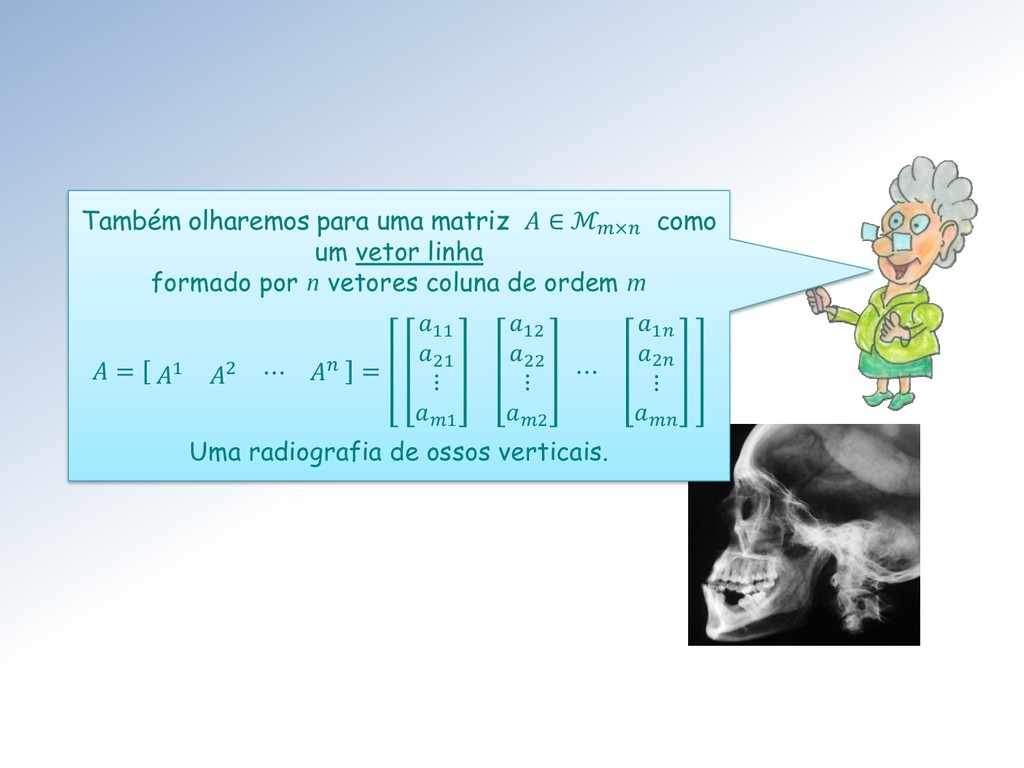
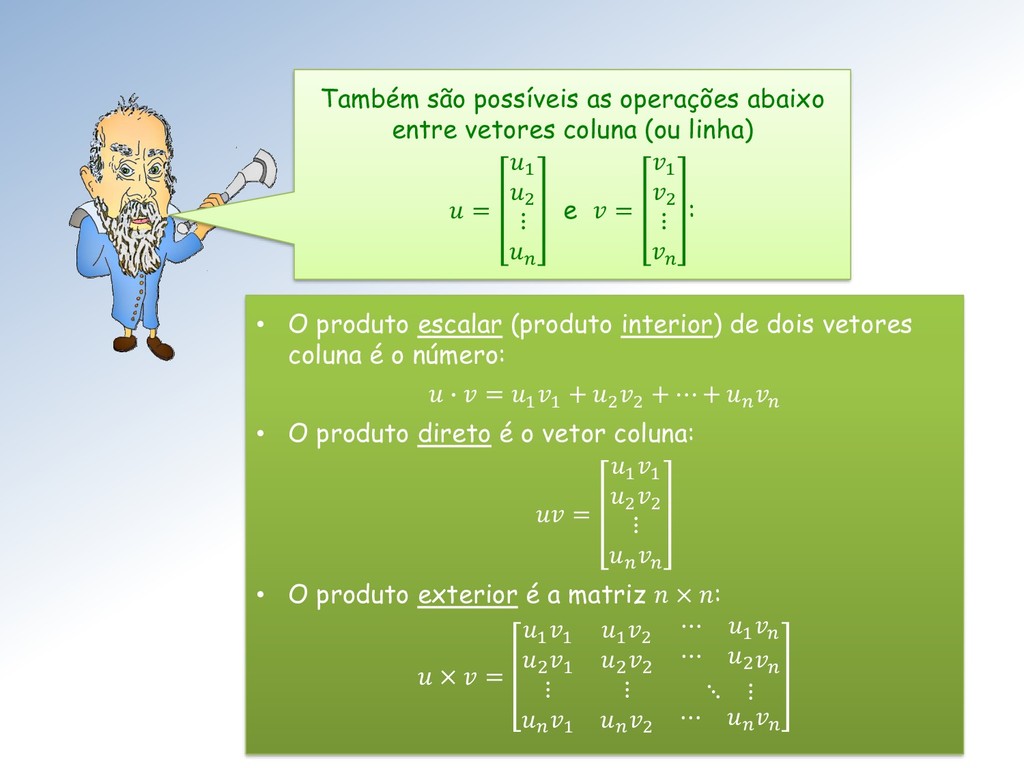
com = , o mesmo número de linhas e colunas. • Os vetores coluna de ordem m. Matrizes × 1, isto é, matrizes coluna de ordem m. • Os vetores linha de ordem n. Matrizes 1 × , isto é, matrizes linha de ordem n. Três tipos particulares de matrizes merecem destaque, relativamente à sua ordem × : Os ingredientes fundamentais da Álgebra linear computacional residem aí.
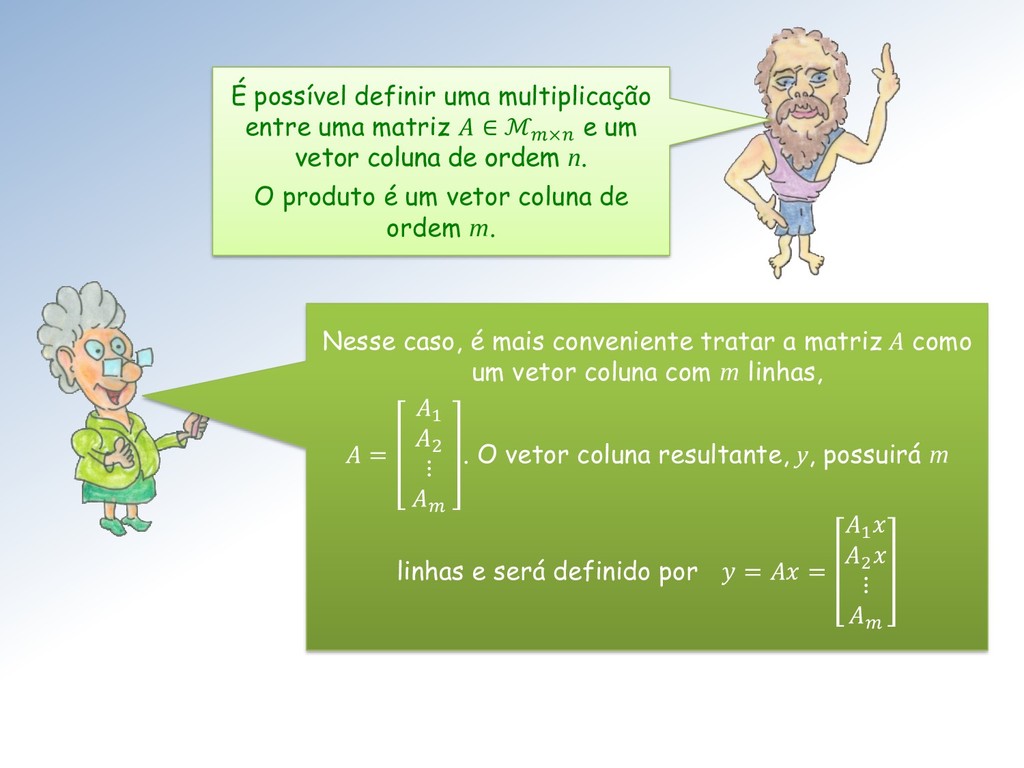
e um vetor coluna de ordem n. O produto é um vetor coluna de ordem m. Nesse caso, é mais conveniente tratar a matriz A como um vetor coluna com m linhas, = 1 2 ⋮ . O vetor coluna resultante, y, possuirá m linhas e será definido por = = 1 2 ⋮
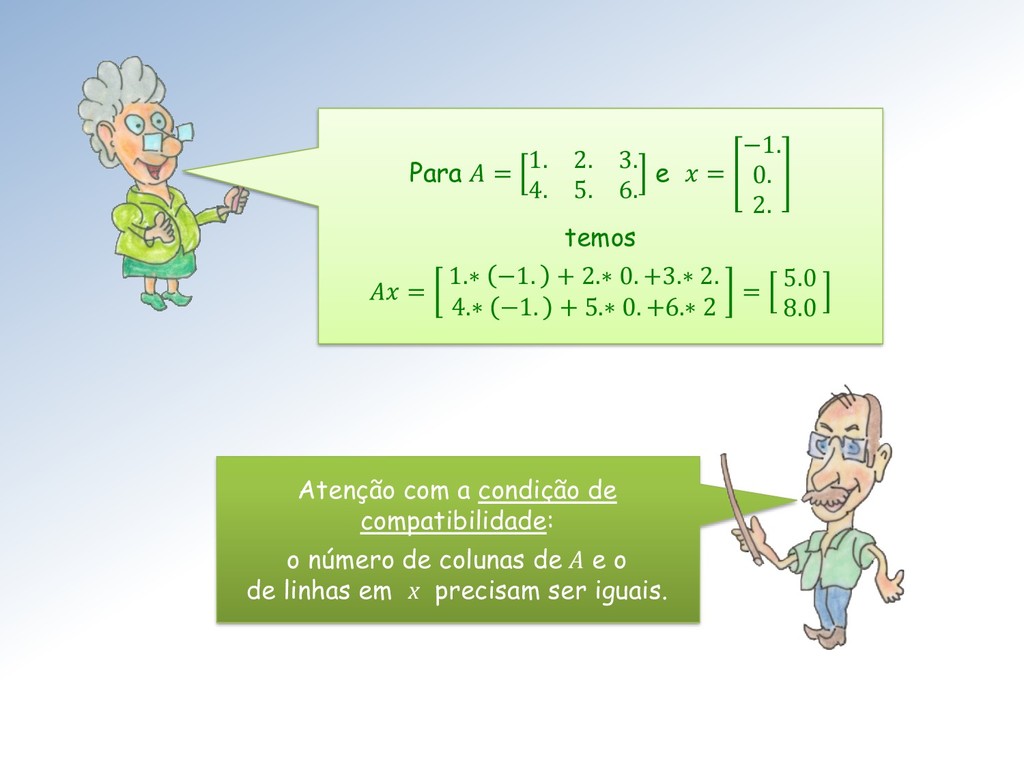
−1. 0. 2. temos = 1.∗ −1. + 2.∗ 0. +3.∗ 2. 4.∗ −1. + 5.∗ 0. +6.∗ 2 = 5.0 8.0 Atenção com a condição de compatibilidade: o número de colunas de A e o de linhas em x precisam ser iguais.
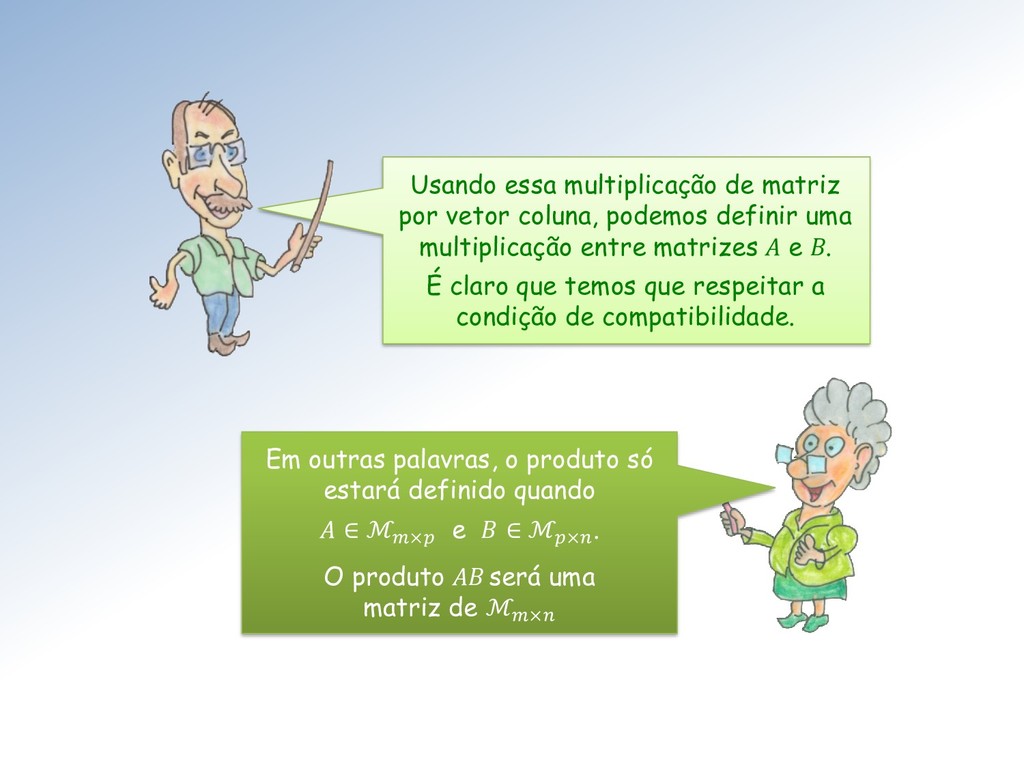
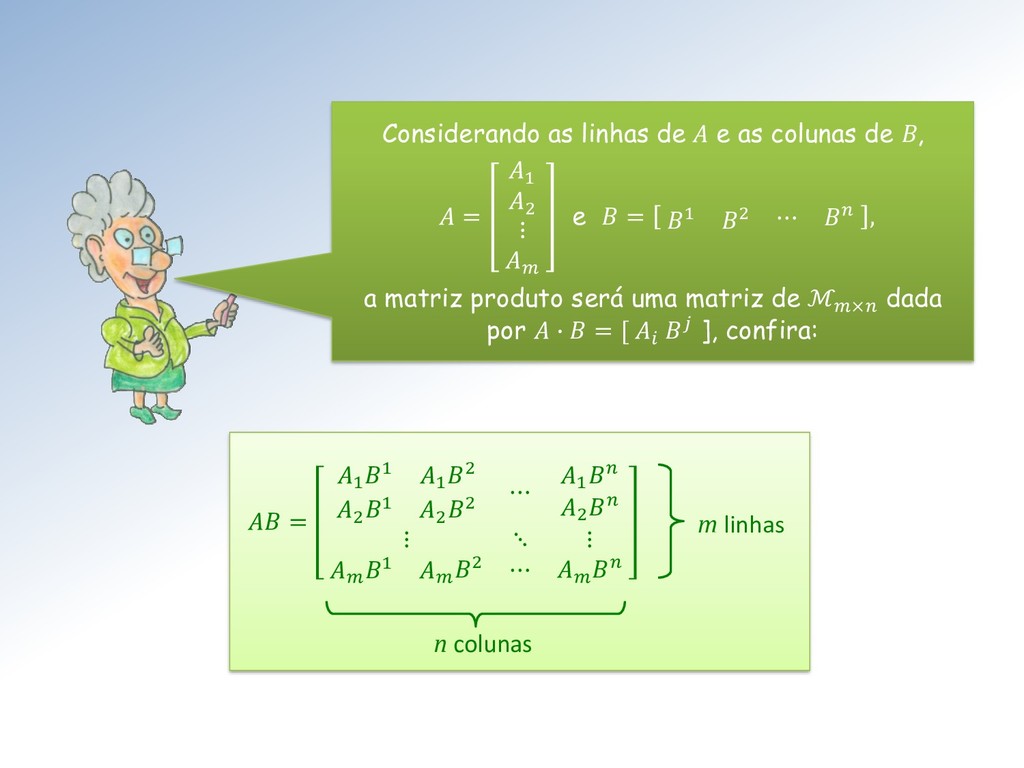
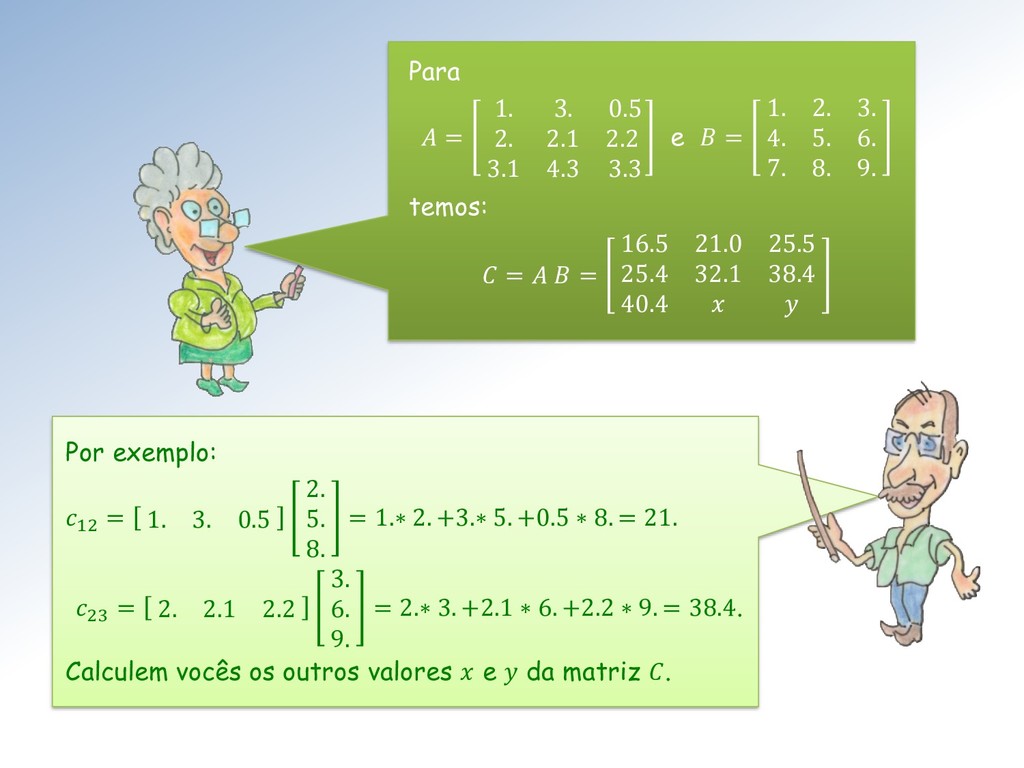
uma multiplicação entre matrizes A e B. É claro que temos que respeitar a condição de compatibilidade. Em outras palavras, o produto só estará definido quando ∈ ℳ× e ∈ ℳ× . O produto AB será uma matriz de ℳ×
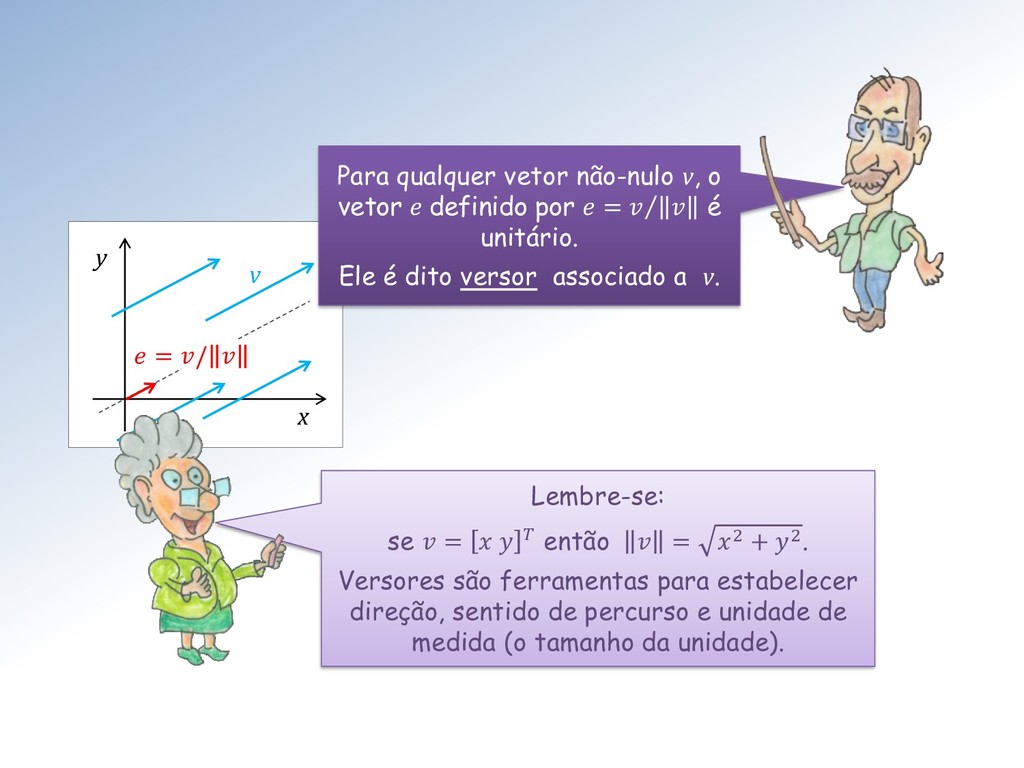
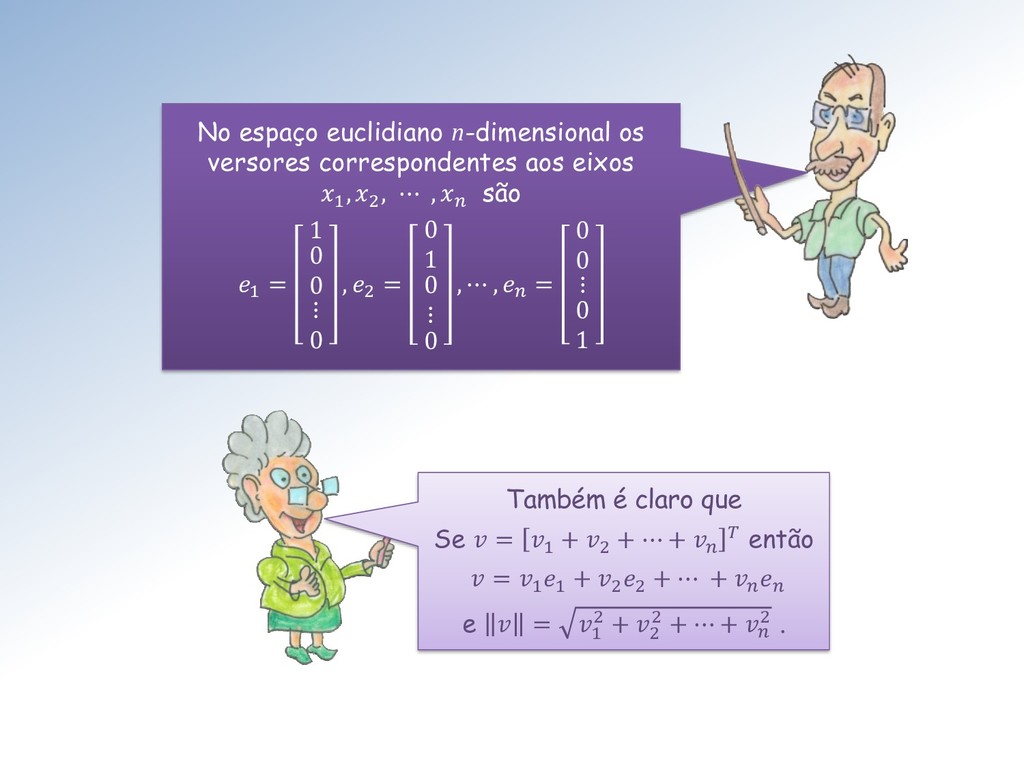
o vetor e definido por Τ = é unitário. Ele é dito versor associado a v. Lembre-se: se = então = 2 + 2. Versores são ferramentas para estabelecer direção, sentido de percurso e unidade de medida (o tamanho da unidade).
que mais poderemos fazer além de combinações desse tipo? Muitas coisas mais, minha filha, mas você lembrou-me de um termo importante. Mestres, podemos fazer pouca coisa com vetores. Além de calcular a , só umas combinações tipo 2 3. −1. 2.5 + 0.5 0.4 1.5 2.0 ,
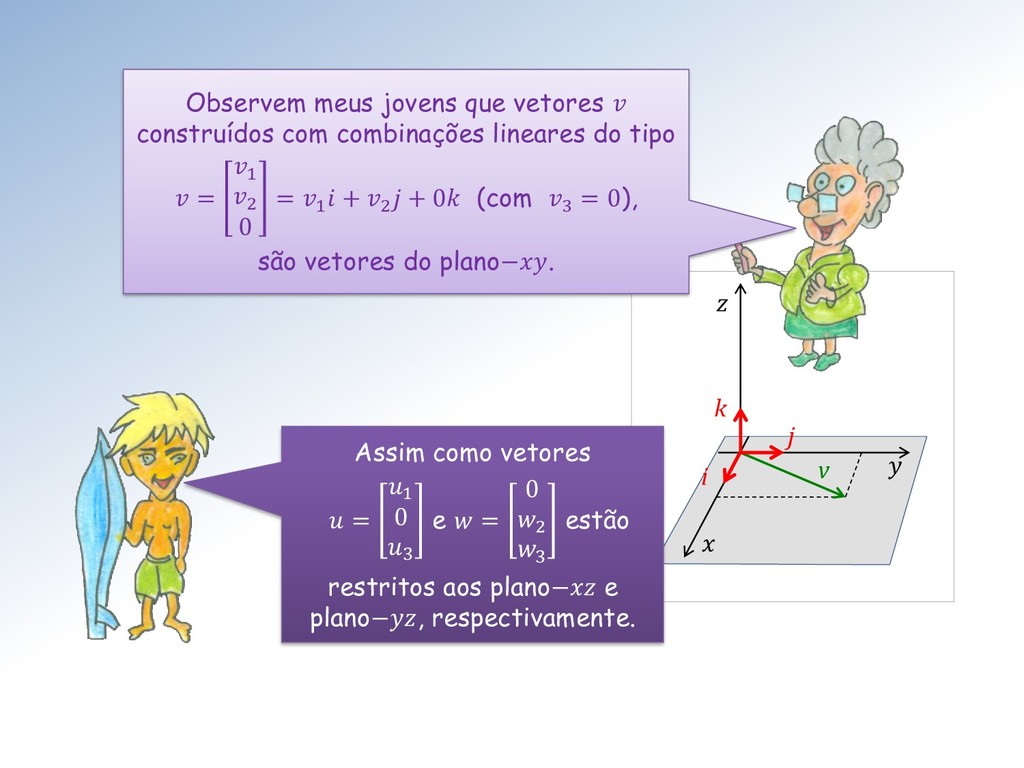
3 e = 0 2 3 estão restritos aos plano− e plano−, respectivamente. Observem meus jovens que vetores construídos com combinações lineares do tipo = 1 2 0 = 1 + 2 + 0 (com 3 = 0), são vetores do plano−.
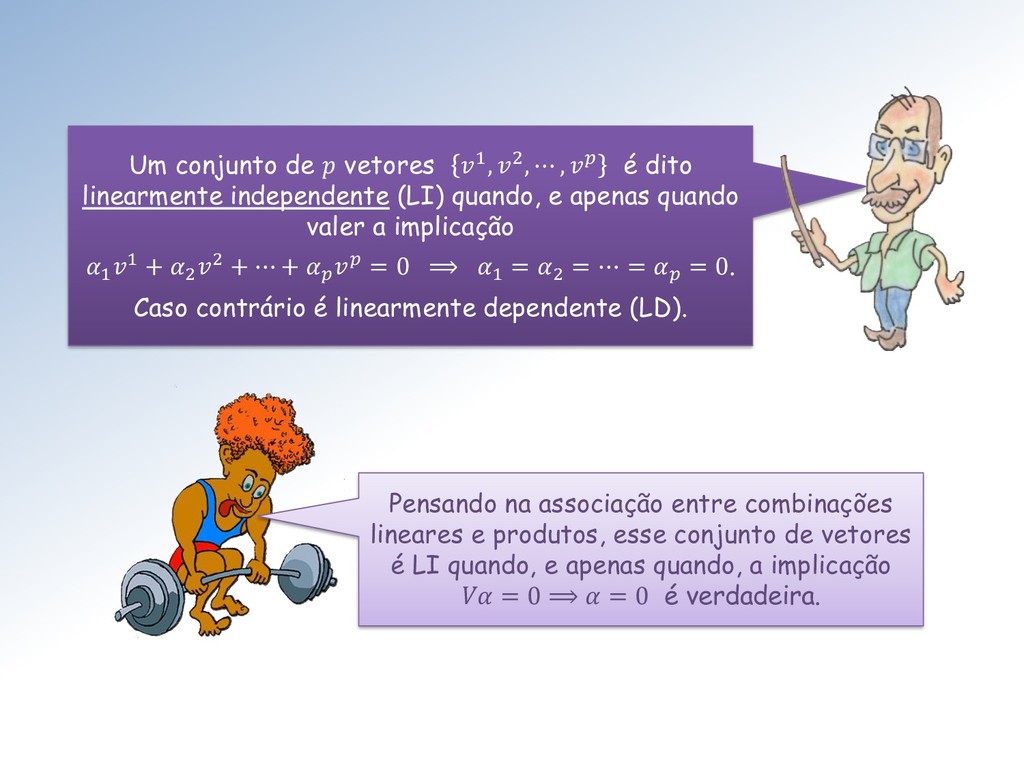
linearmente independente (LI) quando, e apenas quando valer a implicação 1 1 + 2 2 + ⋯ + = 0 ⟹ 1 = 2 = ⋯ = = 0. Caso contrário é linearmente dependente (LD). Pensando na associação entre combinações lineares e produtos, esse conjunto de vetores é LI quando, e apenas quando, a implicação = 0 ⟹ = 0 é verdadeira.
é uma base de um espaço vetorial quando: 1. Gera , isto é, todo ∈ se escreve como combinação linear de vetores de β, 2. β é LI. Para todo espaço vetorial temos apenas duas possibilidades: 1ª - Ou toda base possui um mesmo número maximal de vetores 2ª - Ou não.
! Mais adiante veremos alguns espaços de funções que possuem dimensão infinita ℵ0 . Eles são importantíssimos ! Você está na UFRJ para aprender bem mais que em outras Un[zb,s.
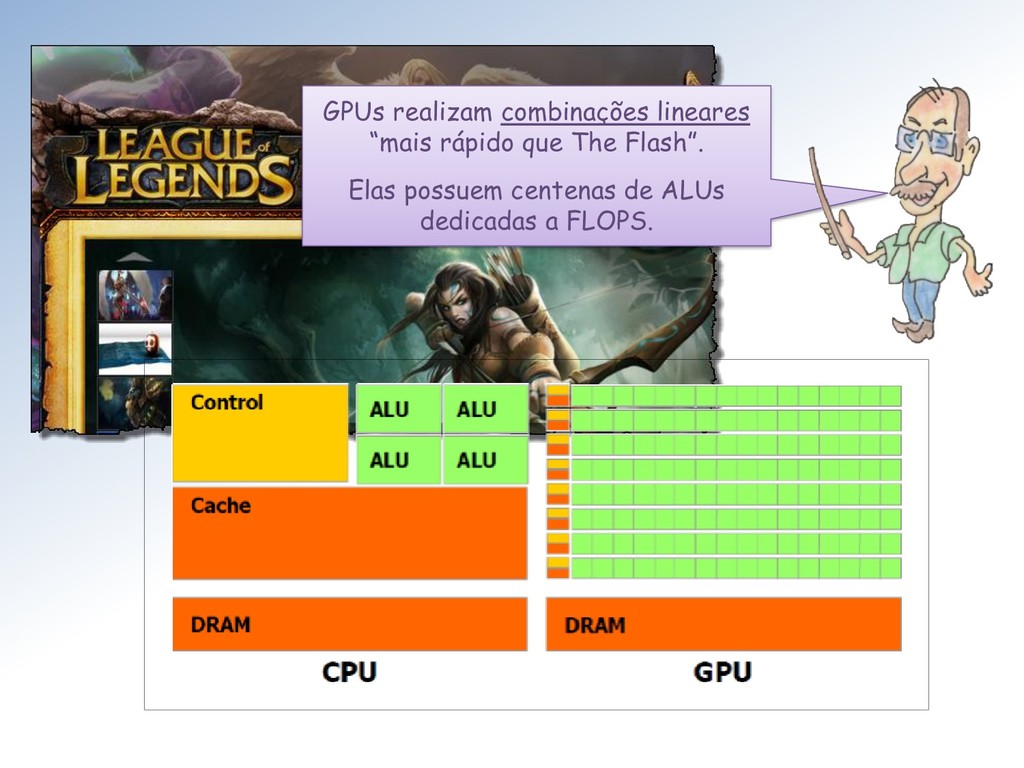
começou a funcionar em 1946, eles fazem isso. Foram criados para efetuar montanhas de adições e multiplicações. É, mas hoje fazem muito mais. Para jogar League of Legends preciso de acesso à Internet e de uma GPU para suportar os gráficos.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![O produto direto entre duas matrizes × = [ ]](https://files.speakerdeck.com/presentations/bccca0ffcde640fc8b1025617883bfa5/slide_70.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}