ganhou vida própria em meados do século XX, com o advento dos computadores. Começaremos recordando o conteúdo básico de Álgebra linear. Com os vetores.
13 volumes dos Elementos, de Euclides, sistematizou e formalizou matematicamente a visualização de pontos, retas, planos, ângulos, triângulos e outras figuras geométricas.
of the two leading mathematicians of the first half of the 17th century. According to Peter L. Bernstein, in his book Against the Gods, Fermat "was a mathematician of rare power. He was an independent inventor of analytic geometry, he contributed to the early development of calculus, he did research on the weight of the earth, and he worked on light refraction and optics. In the course of what turned out to be an extended correspondence with Pascal, he made a significant contribution to the theory of probability. But Fermat's crowning achievement was in the theory of numbers."[
texts) states that no three positive integers a, b, and c can satisfy the equation an + bn = cn for any integer value of n greater than two. This theorem was first conjectured by Pierre de Fermat in 1637, famously in the margin of a copy of Arithmetica where he claimed he had a proof that was too large to fit in the margin. Pierre Fermat foi um gênio da matemática, não só na geometria analítica.
na edição de maio de 1995 do Annals of Mathematics. Estas publicações estabeleceram o teorema de modularidade para curvas elípticas semi-estáveis, o último passo para provar o Último Teorema de Fermat, 358 anos depois que foi conjecturado. Com base na obra de Ken Ribet, Andrew Wiles conseguiu provar o suficiente do teorema de modularidade para provar o Último Teorema de Fermat, com a ajuda de Richard Taylor. Esta realização de Wiles foi noticiado amplamente na imprensa popular, e foi popularizada em livros e programas de televisão.
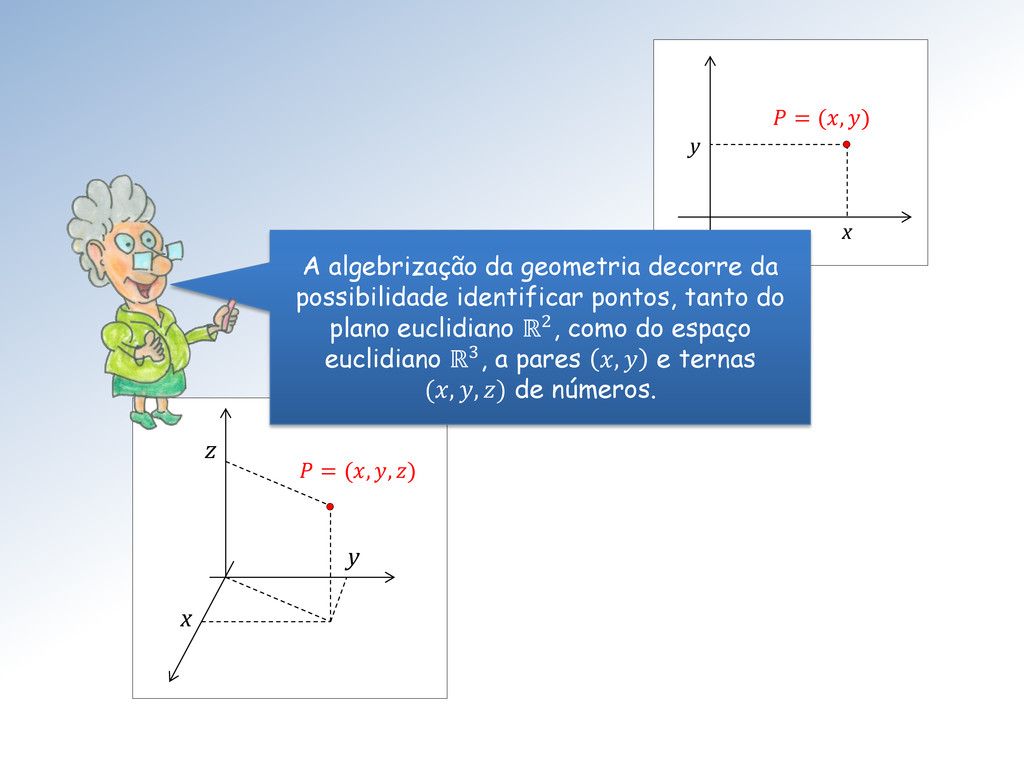
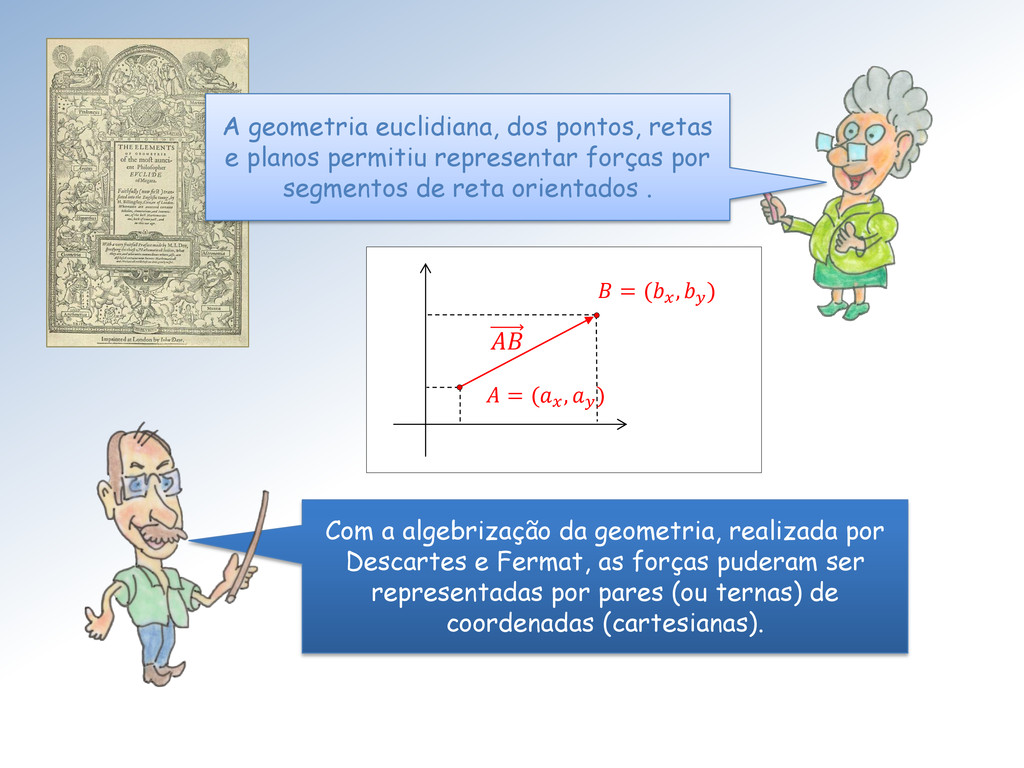
, ) A algebrização da geometria decorre da possibilidade identificar pontos, tanto do plano euclidiano ℝ2, como do espaço euclidiano ℝ3, a pares , e ternas (, , ) de números.
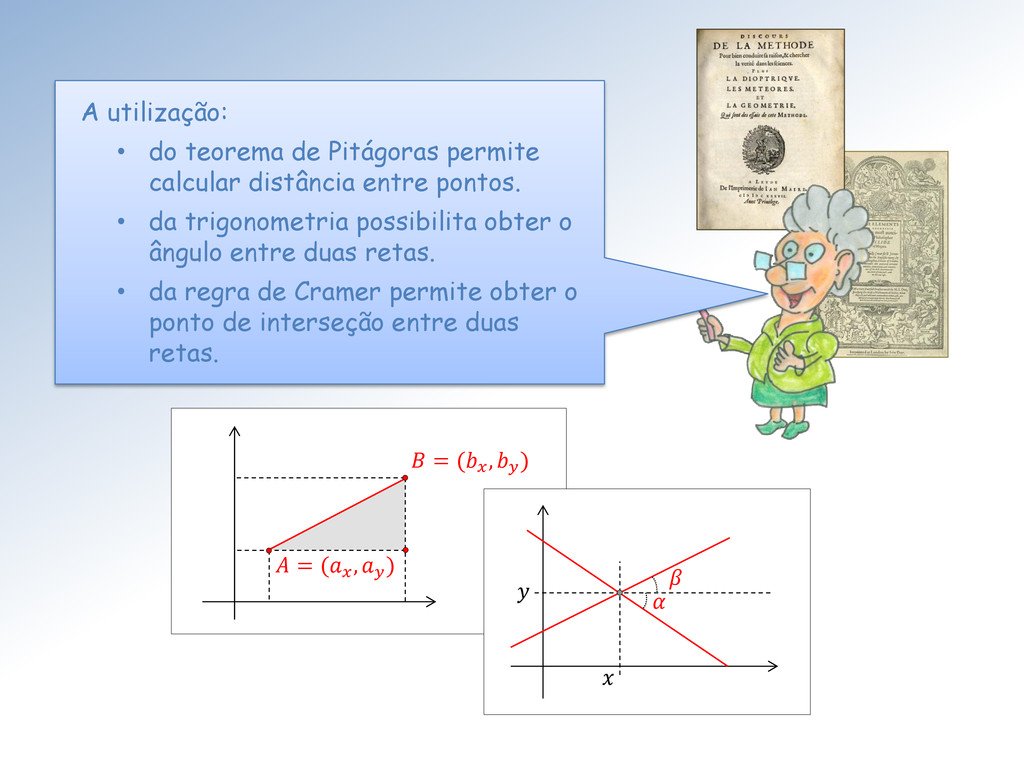
entre pontos. • da trigonometria possibilita obter o ângulo entre duas retas. • da regra de Cramer permite obter o ponto de interseção entre duas retas. = ( , ) = ( , )
no Youtube: The Calculus Controversy. Em particular Newton e Leibniz, criaram o Cálculo Infinitesimal logo depois de Descartes e Fermat parirem a Geometria Analítica. Aliás é de Newton a frase: “Se enxerguei mais longe é porque estava no ombro de gigantes.”
(erradamente) e Arquimedes (alavanca, empuxo). Galileu realizou experimentos mostrando que corpos eram acelerados pela força da gravidade, refutando a teoria aristotélica (cristalizada pela Igreja). As três leis de Newton, estabelecendo o conceito de força de forma clara, foram apresentadas em seu famoso livro, publicado em 1687.
as forças puderam ser representadas por pares (ou ternas) de coordenadas (cartesianas). A geometria euclidiana, dos pontos, retas e planos permitiu representar forças por segmentos de reta orientados . = ( , ) = ( , )
de tornar as entidades matemáticas mais abstratas, de liberá-las de seu suporte físico. A noção de vetor livre (livre de coordenadas!) como classe de equivalência de segmentos orientados (flechas) com mesmo tamanho, direção e sentido (a equipolência) nasceu em 1832, com Bellavitis. Vetores incorporam claramente o conceito de força.
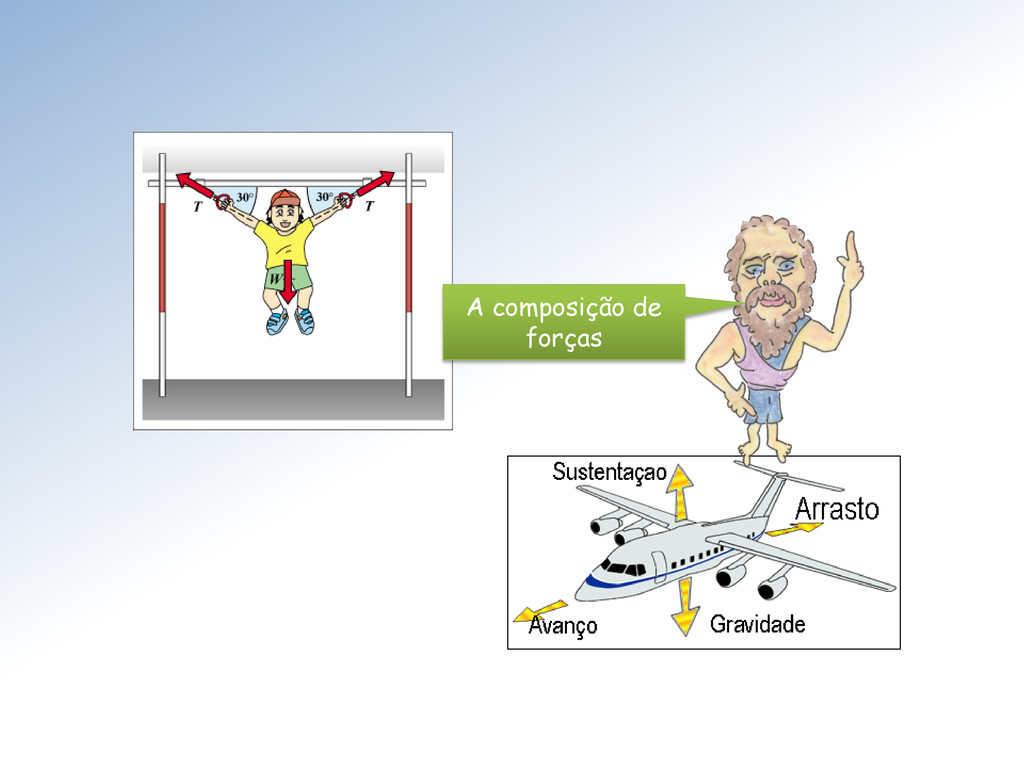
Possuem direção, sentido e magnitude. Normalmente são aplicadas num ponto específico de um corpo – às vezes o centro de massa. O conceito de vetor livre é extremamente utilizado em física e engenharias, por exemplo na composição de forças.
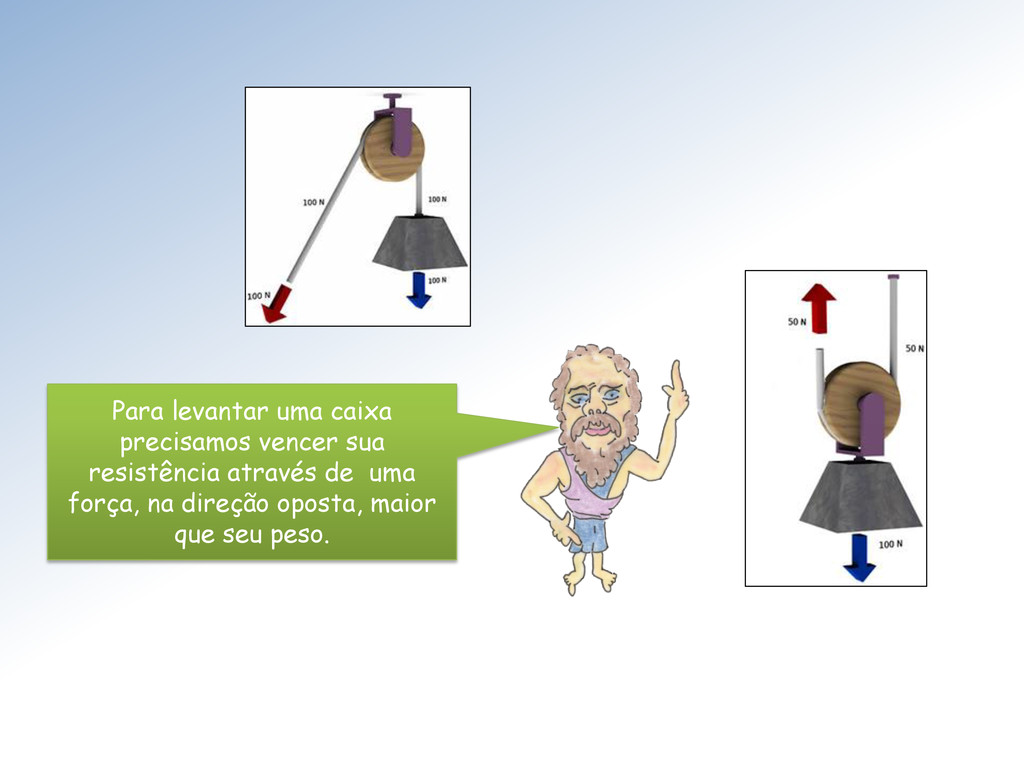
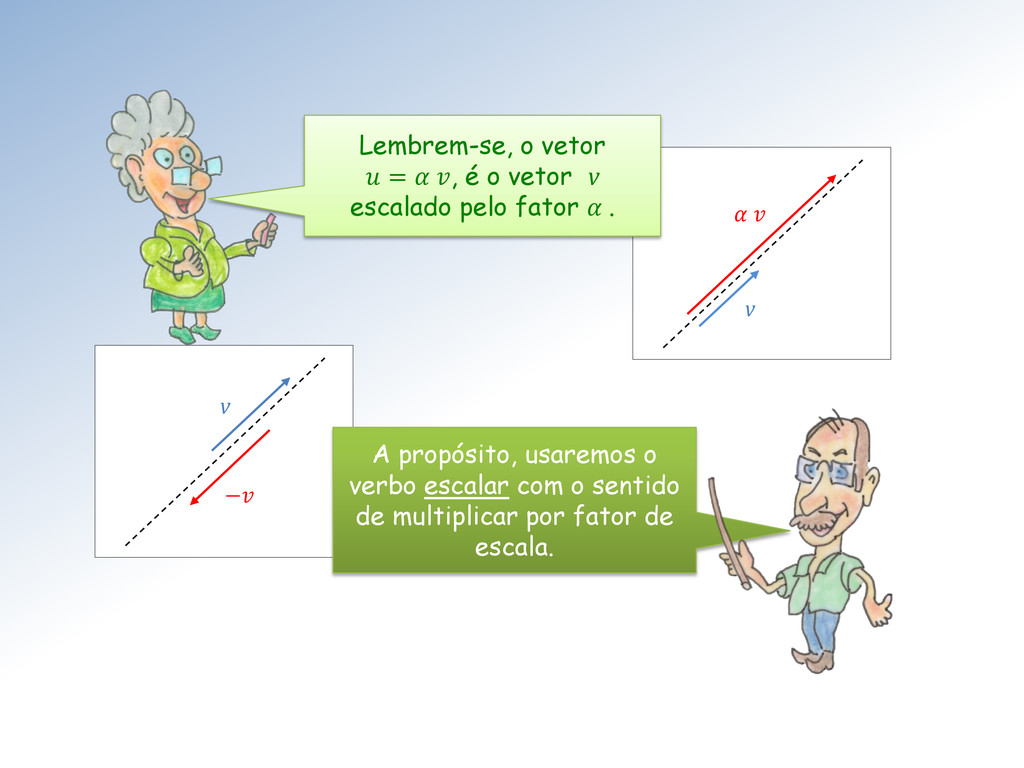
composição de forças. — A multiplicação de um vetor por fator de escala, está associada a equilibrar uma força, a aumentá-la ou reduzi-la. As operações fundamentais com vetores estão diretamente associadas ao conceito de força.
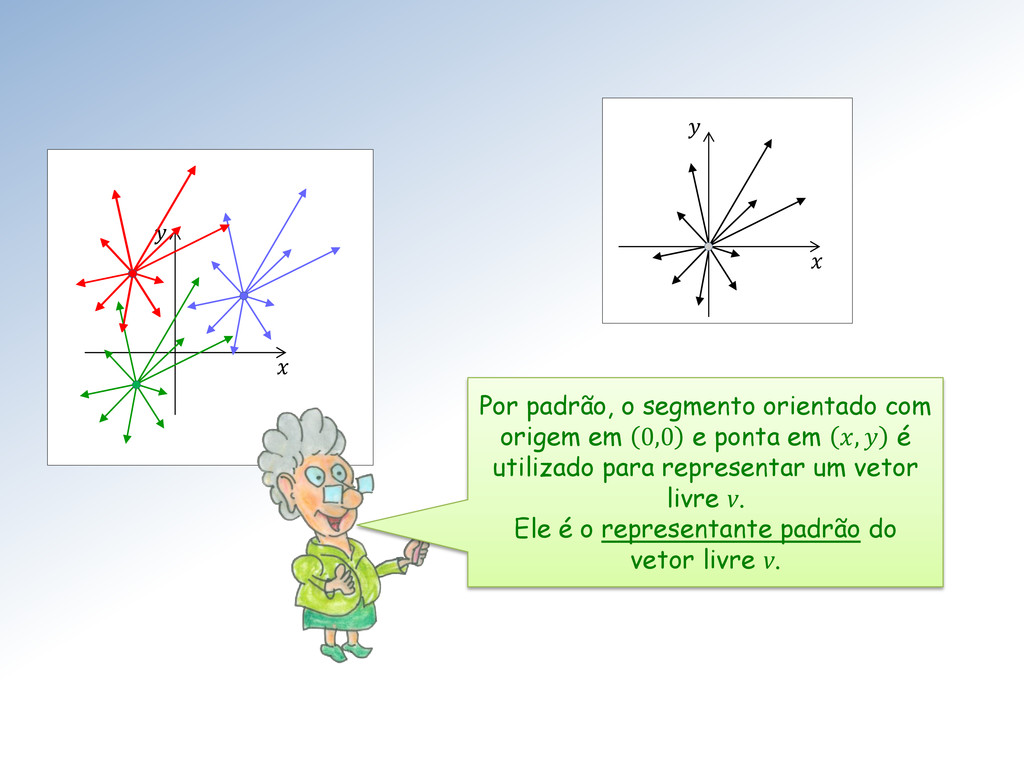
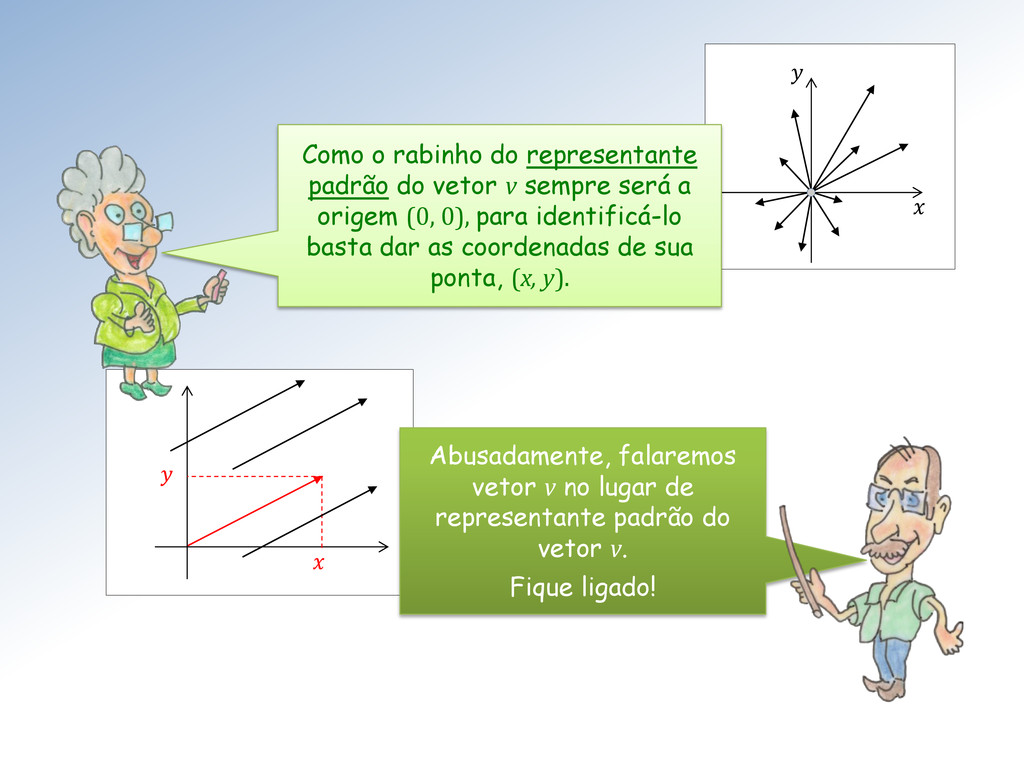
será a origem (0, 0), para identificá-lo basta dar as coordenadas de sua ponta, (x, y). Abusadamente, falaremos vetor v no lugar de representante padrão do vetor v. Fique ligado!
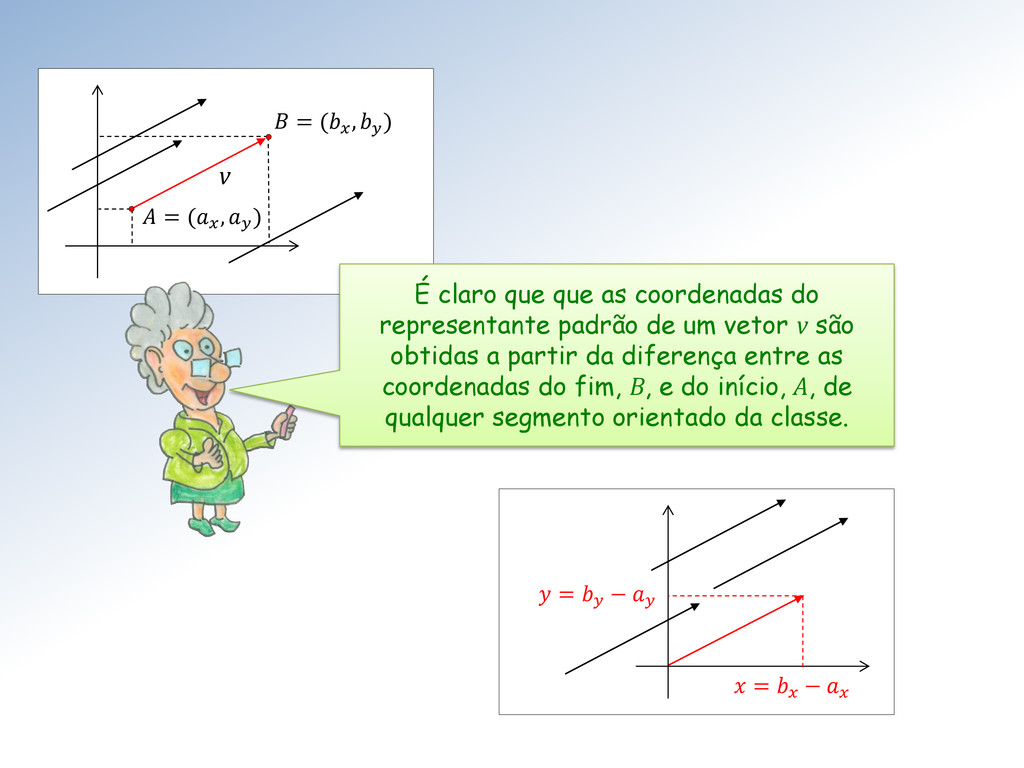
( , ) É claro que que as coordenadas do representante padrão de um vetor v são obtidas a partir da diferença entre as coordenadas do fim, B, e do início, A, de qualquer segmento orientado da classe.
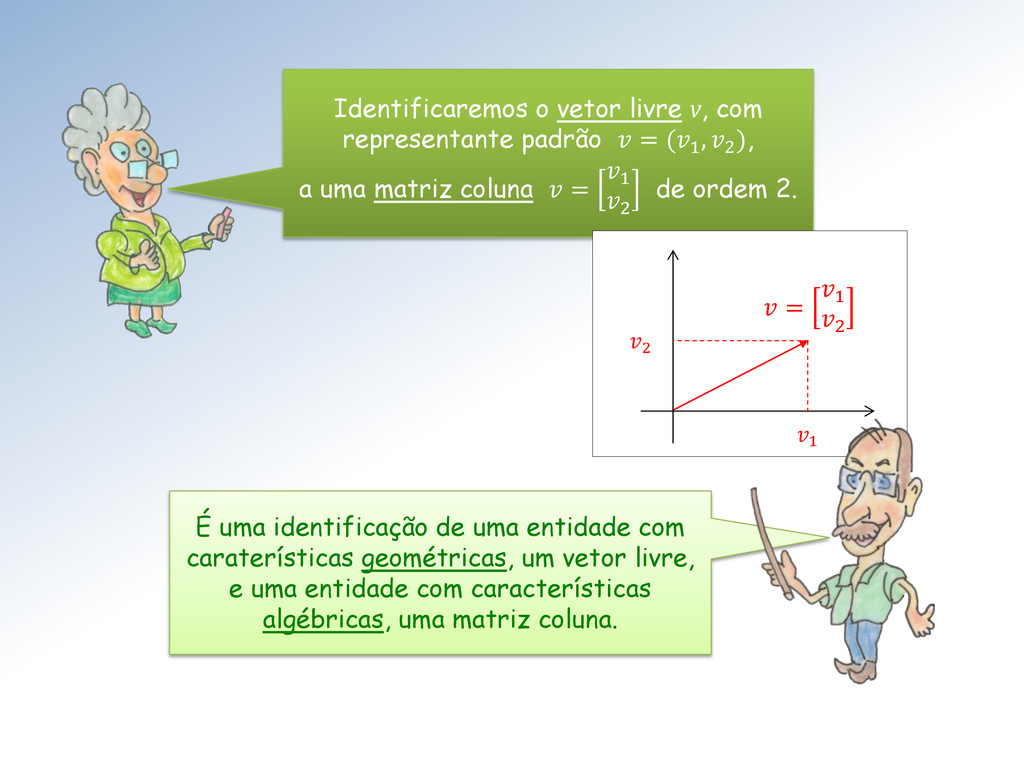
, 2 ), a uma matriz coluna = 1 2 de ordem 2. 2 1 = 1 2 É uma identificação de uma entidade com caraterísticas geométricas, um vetor livre, e uma entidade com características algébricas, uma matriz coluna.
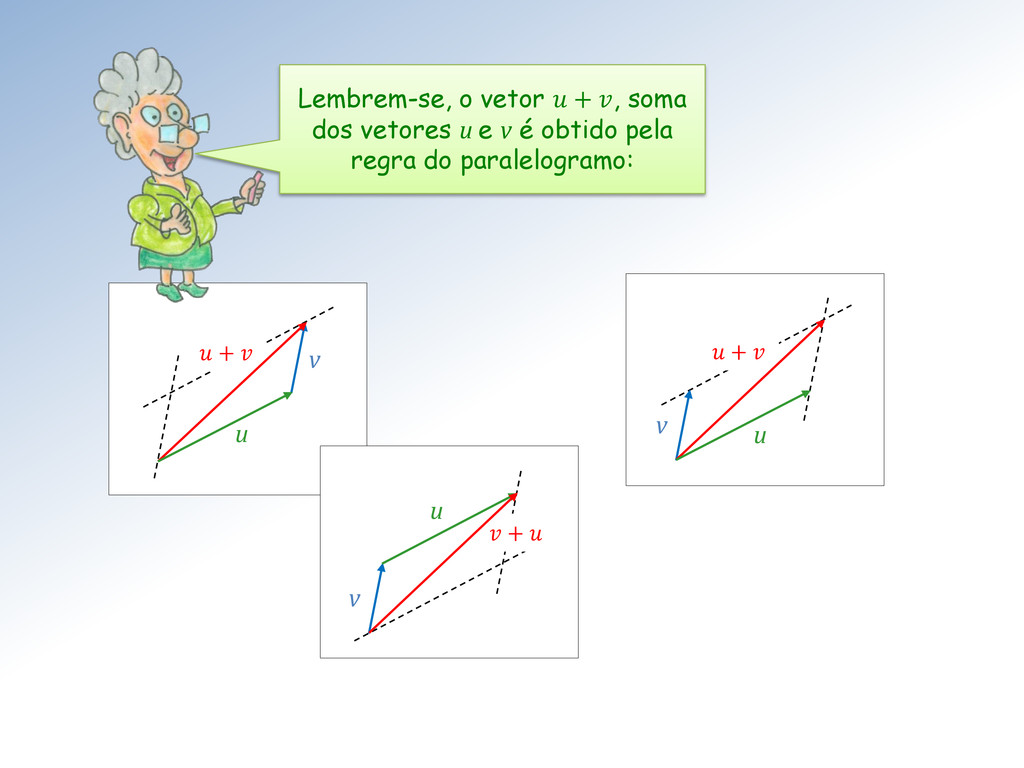
entre: • a adição de vetores via regra do paralelogramo • e a adição de matrizes coluna E garantir também a correspondência entre: • a multiplicação de um vetor livre por um fator de escala • e a multiplicação de uma matriz coluna por um número real
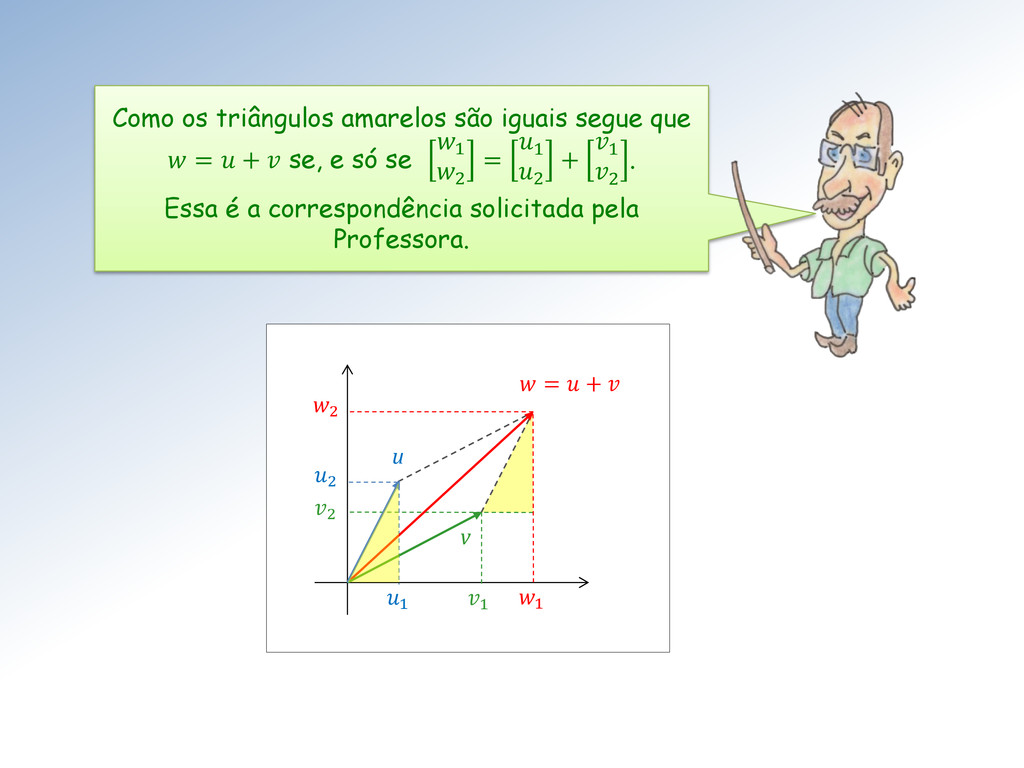
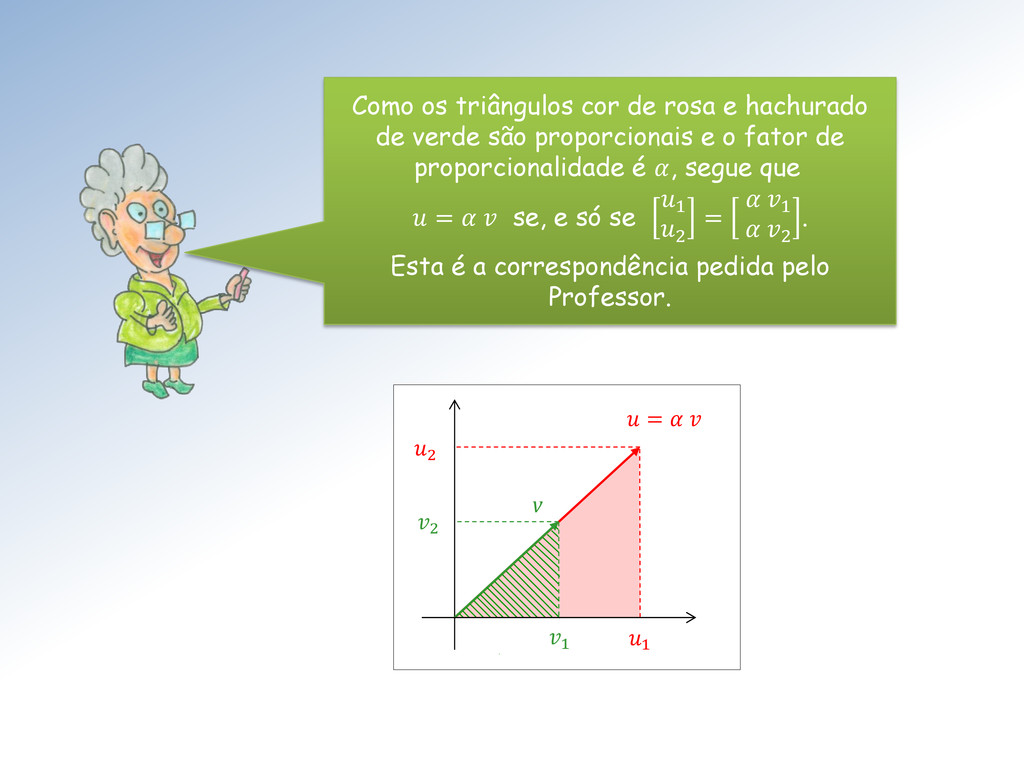
de rosa e hachurado de verde são proporcionais e o fator de proporcionalidade é , segue que = se, e só se 1 2 = 1 2 . Esta é a correspondência pedida pelo Professor.
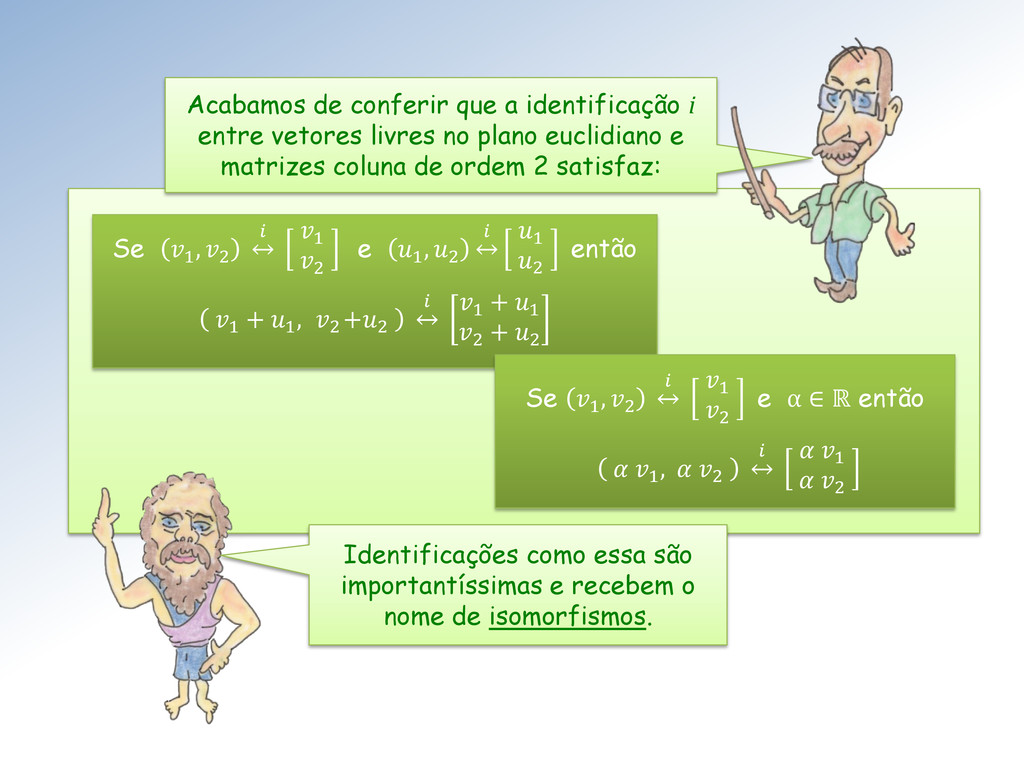
1 2 então 1 + 1 , 2 +2 1 + 1 2 + 2 Se 1 , 2 1 2 e α ∈ ℝ então 1 , 2 1 2 Identificações como essa são importantíssimas e recebem o nome de isomorfismos. Acabamos de conferir que a identificação i entre vetores livres no plano euclidiano e matrizes coluna de ordem 2 satisfaz:
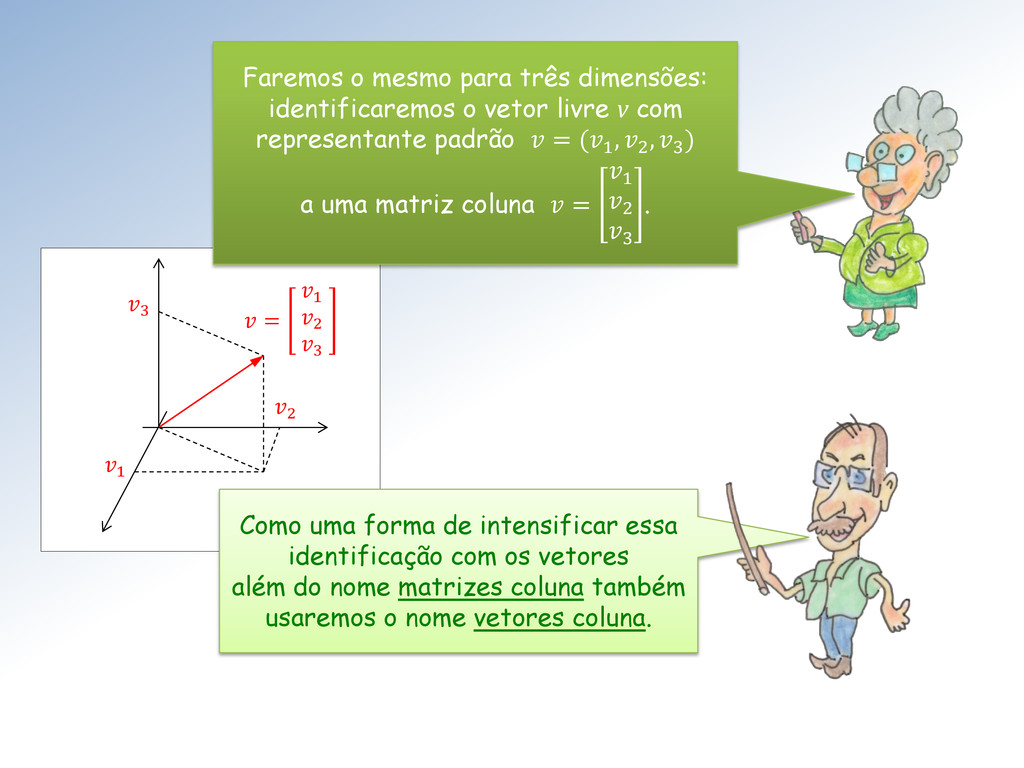
para três dimensões: identificaremos o vetor livre v com representante padrão = (1 , 2 , 3 ) a uma matriz coluna = 1 2 3 . Como uma forma de intensificar essa identificação com os vetores além do nome matrizes coluna também usaremos o nome vetores coluna.
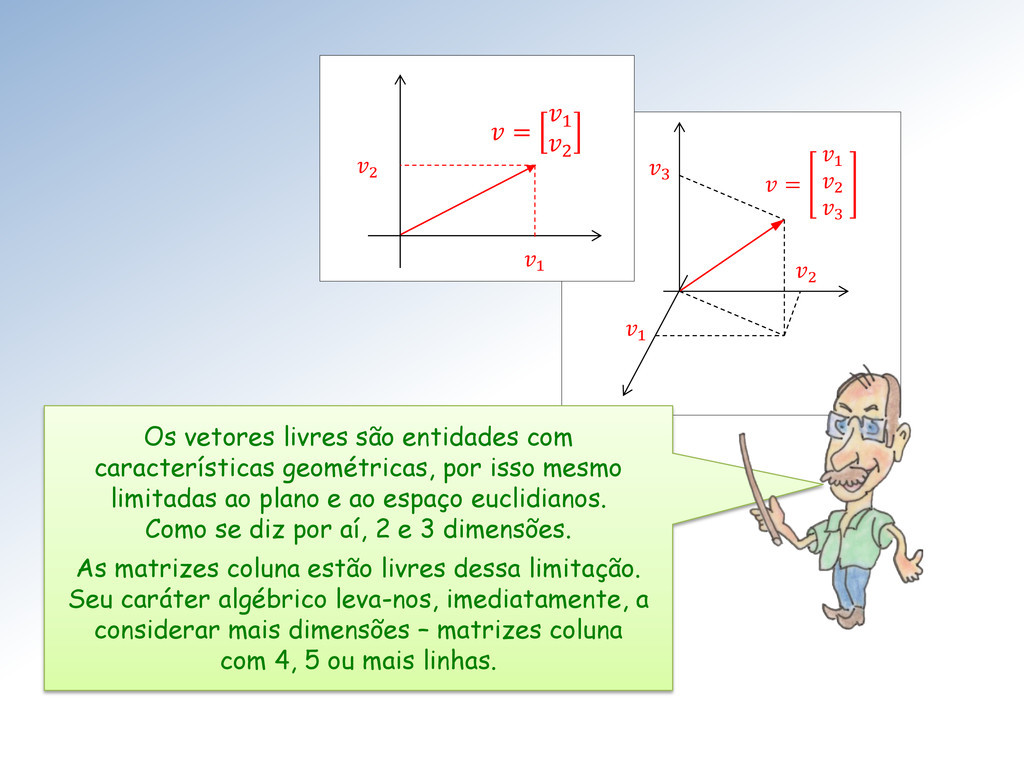
1 2 Os vetores livres são entidades com características geométricas, por isso mesmo limitadas ao plano e ao espaço euclidianos. Como se diz por aí, 2 e 3 dimensões. As matrizes coluna estão livres dessa limitação. Seu caráter algébrico leva-nos, imediatamente, a considerar mais dimensões – matrizes coluna com 4, 5 ou mais linhas.
didática. Minha metade platônica treme em imaginar que, com tal identificação, vocês dois transportarão para matrizes coluna tudo o que percebemos com nossos sentidos. Elas são do mundo das ideias. Já minha metade aristotélica admite estender a outros entes matemáticos nossa percepção euclidiana de distâncias, tamanhos, ângulos, sombras...
euclidiano: 1 , 2 , 3 1 2 3 Aliás, outro isomorfismo imediato é o entre vetores livres e matrizes linha: É só uma troca de notação! Bem Surfista, é mais do que isso. Elas tem sua razão de ser – veremos adiante.
Em Python, os elementos das tuplas ou listas podem ser de tipos diferentes, o que não é o caso dos pontos e das matrizes linha – todos são números reais. Em Python um objeto (container) muito parecido com matrizes linha são as listas. Já as tuplas são semelhantes a pontos do ℝ.
e operaremos algebricamente com matrizes coluna ou com matrizes linha. Afinal de contas o espaço euclidiano é o mundo dos nossos sentidos! A partir de agora usaremos essas identificações de forma indiscriminada.
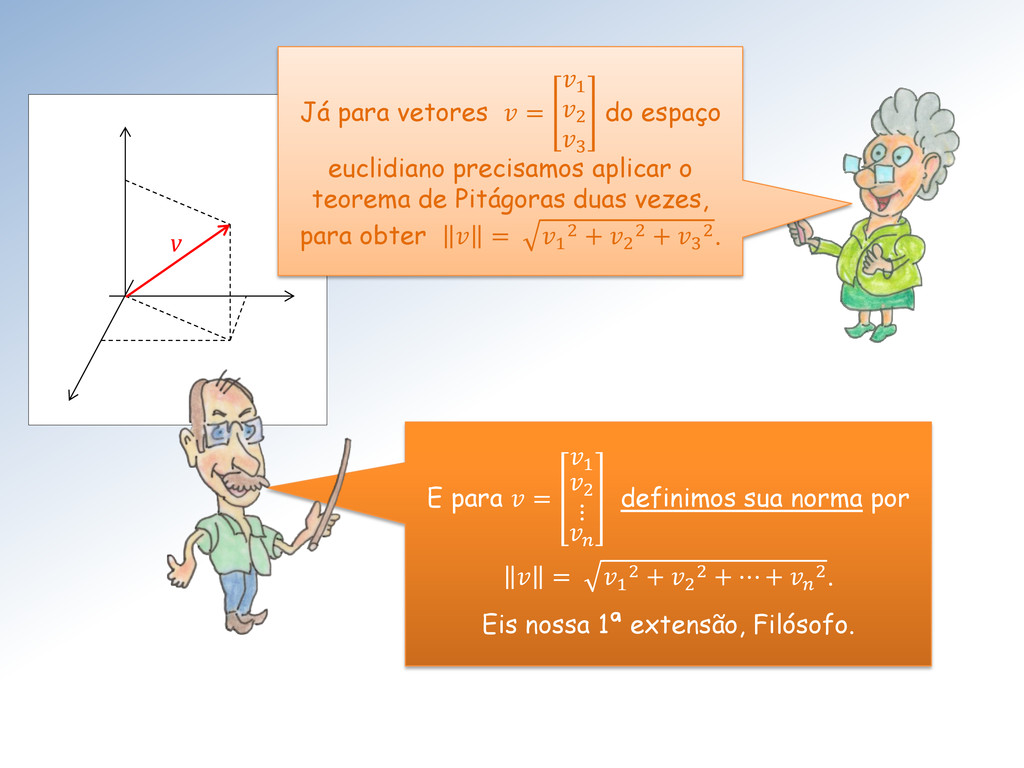
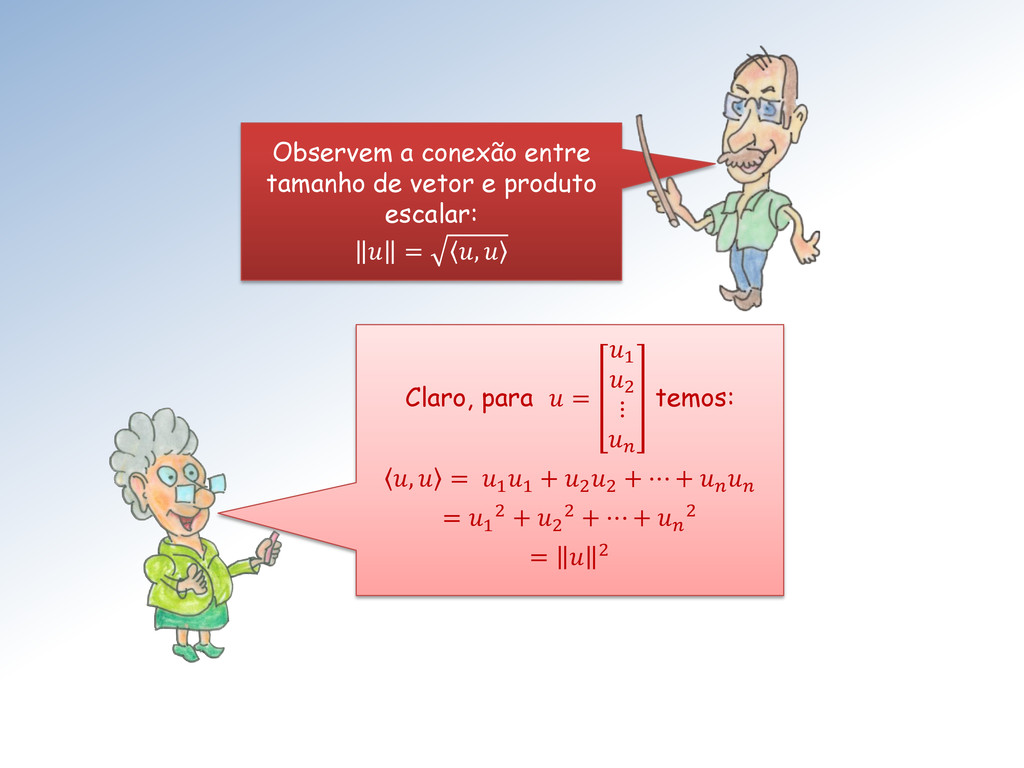
euclidiano precisamos aplicar o teorema de Pitágoras duas vezes, para obter = 1 2 + 2 2 + 3 2. E para = 1 2 ⋮ definimos sua norma por = 1 2 + 2 2 + ⋯ + 2. Eis nossa 1ª extensão, Filósofo.
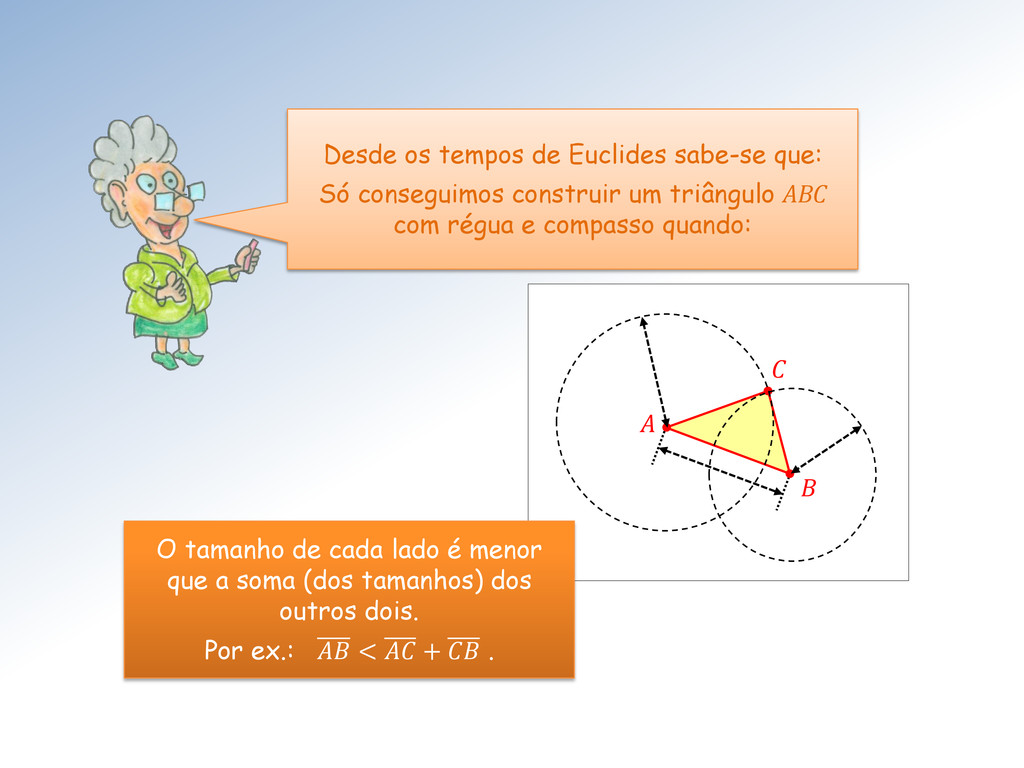
Só conseguimos construir um triângulo ABC com régua e compasso quando: O tamanho de cada lado é menor que a soma (dos tamanhos) dos outros dois. Por ex.: < + .
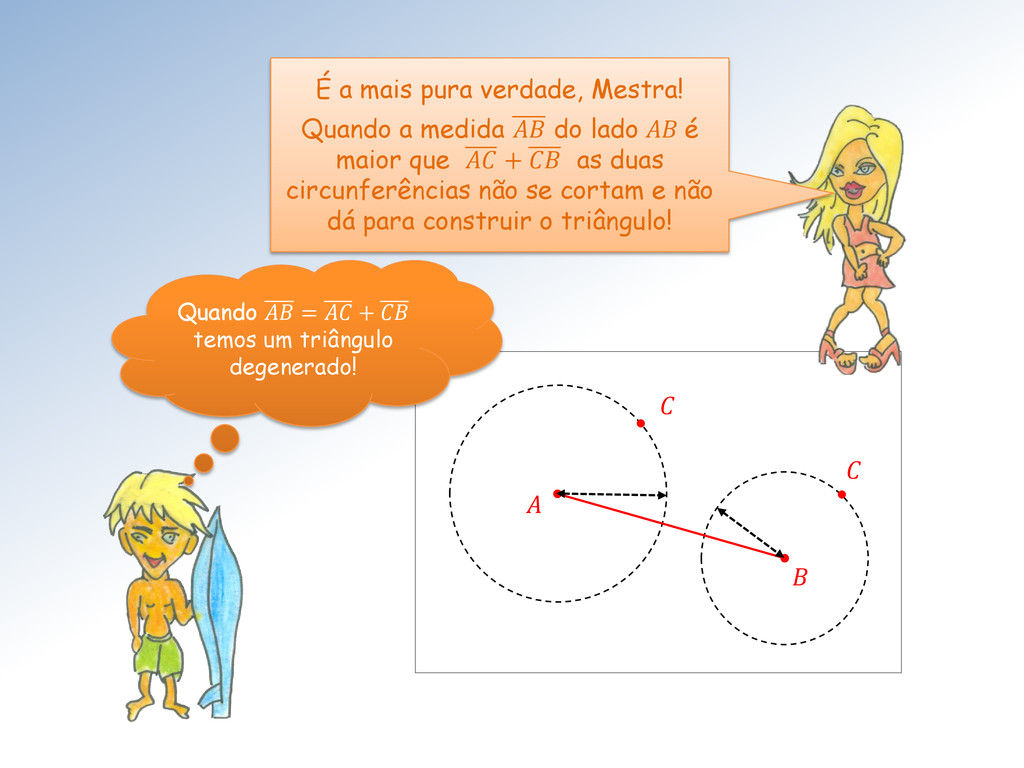
Quando a medida do lado AB é maior que + as duas circunferências não se cortam e não dá para construir o triângulo! Quando = + temos um triângulo degenerado!
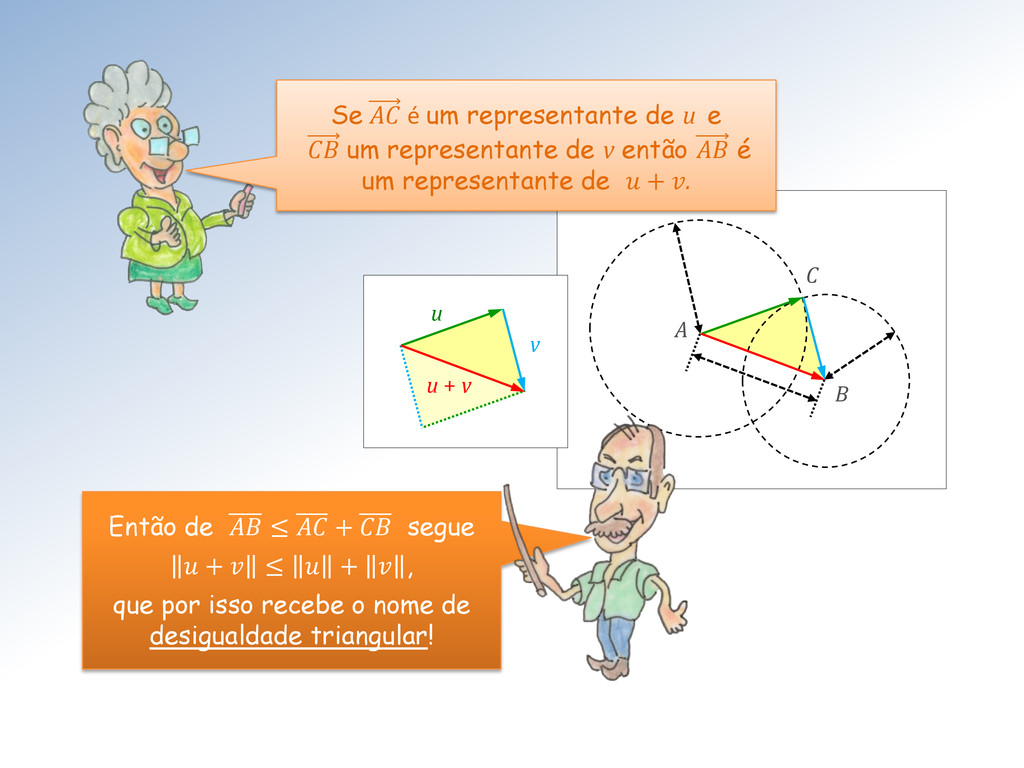
≤ + segue + ≤ + , que por isso recebe o nome de desigualdade triangular! Se é um representante de u e um representante de v então é um representante de + .
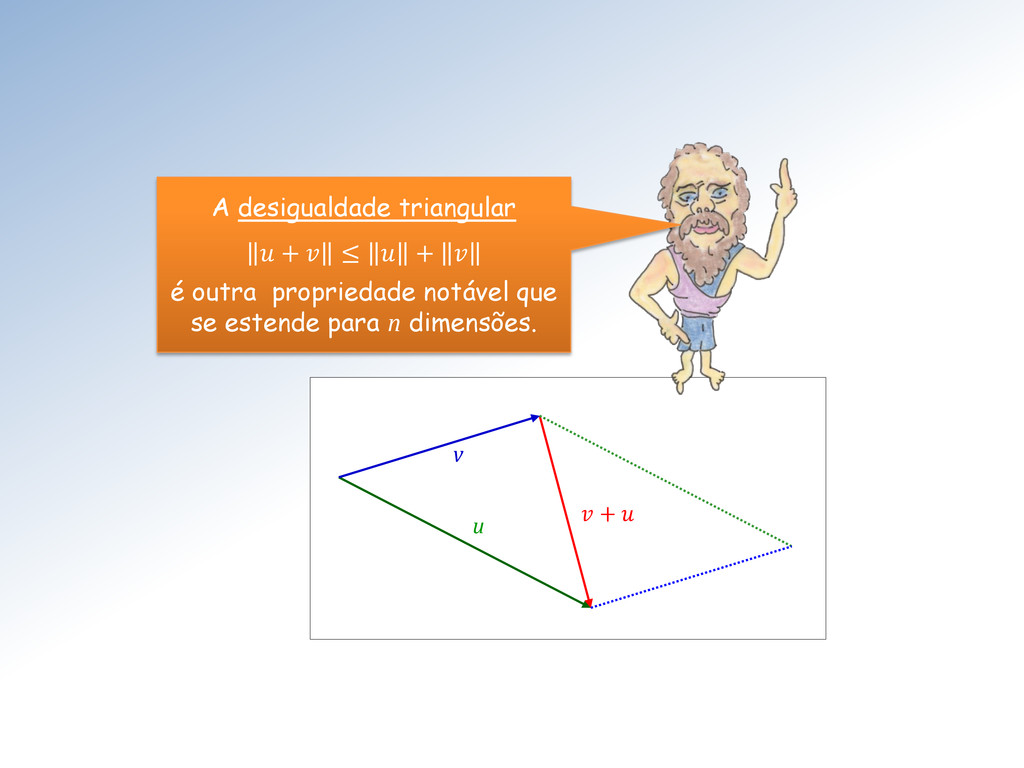
vetores de n dimensões. Mestre, no espaço euclidiano ainda dá para usar régua e compasso. Mas em n dimensões, como faço? Pois é meu jovem, esse é o desafio!
o vetor e definido por = é unitário. Ele é dito versor associado a v. Versores são ferramentas para estabelecer direção, sentido de percurso e unidade de medida.
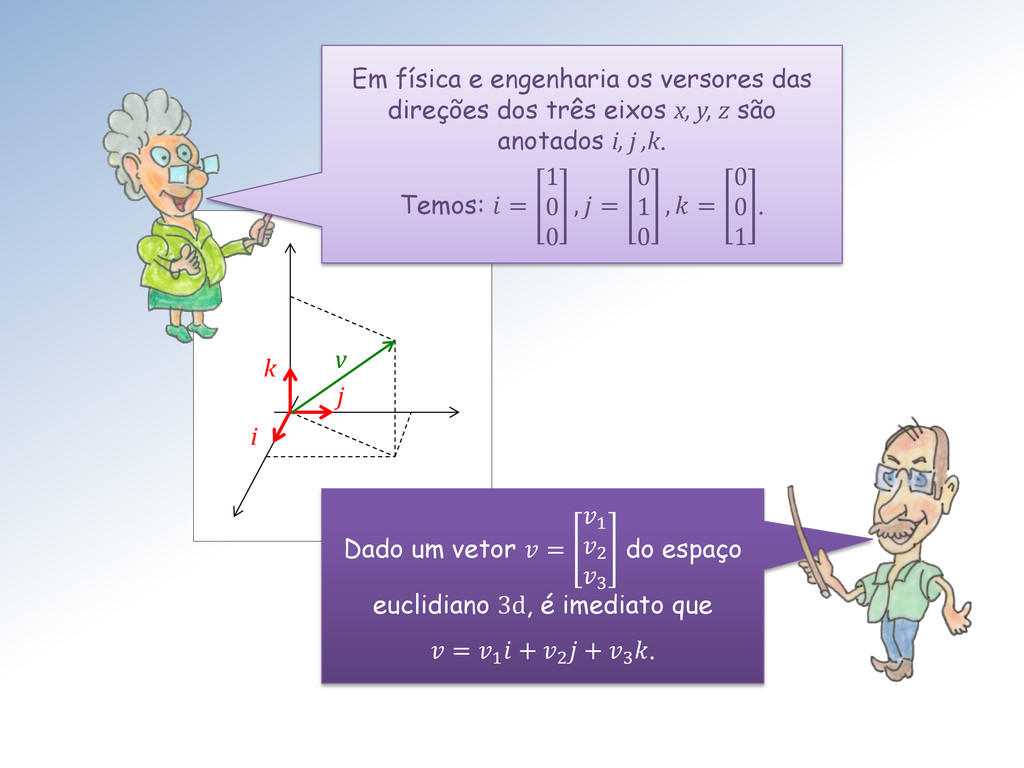
das direções dos três eixos x, y, z são anotados i, j ,k. Temos: = 1 0 0 , = 0 1 0 , = 0 0 1 . Dado um vetor = 1 2 3 do espaço euclidiano 3d, é imediato que = 1 + 2 + 3 .
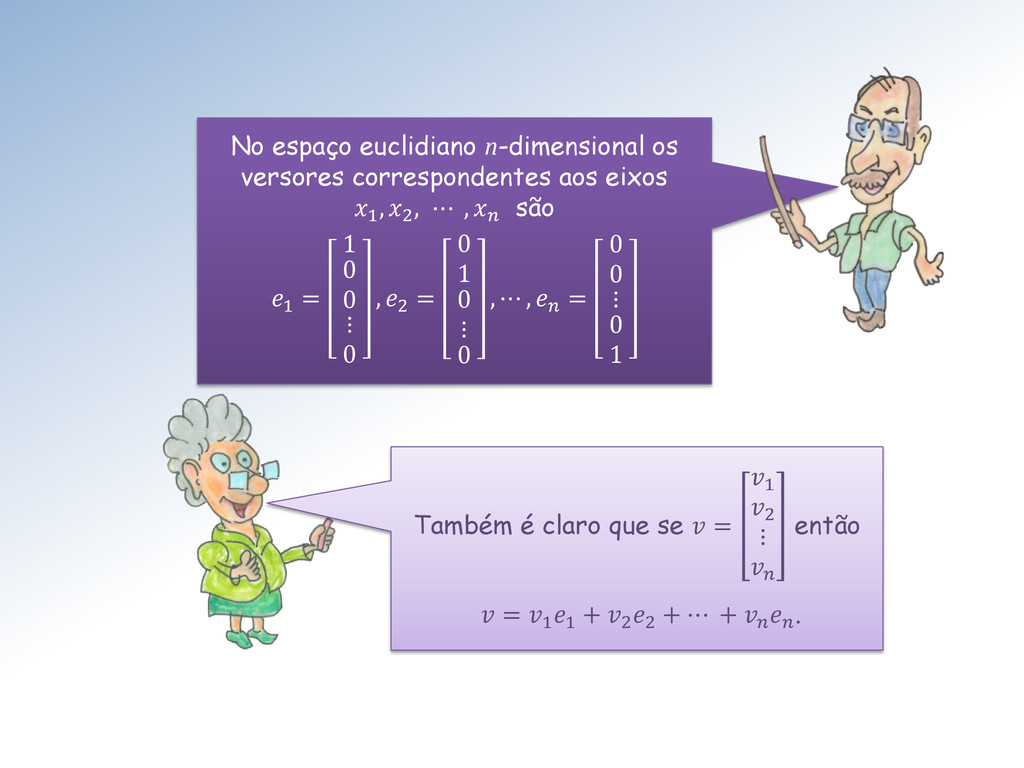
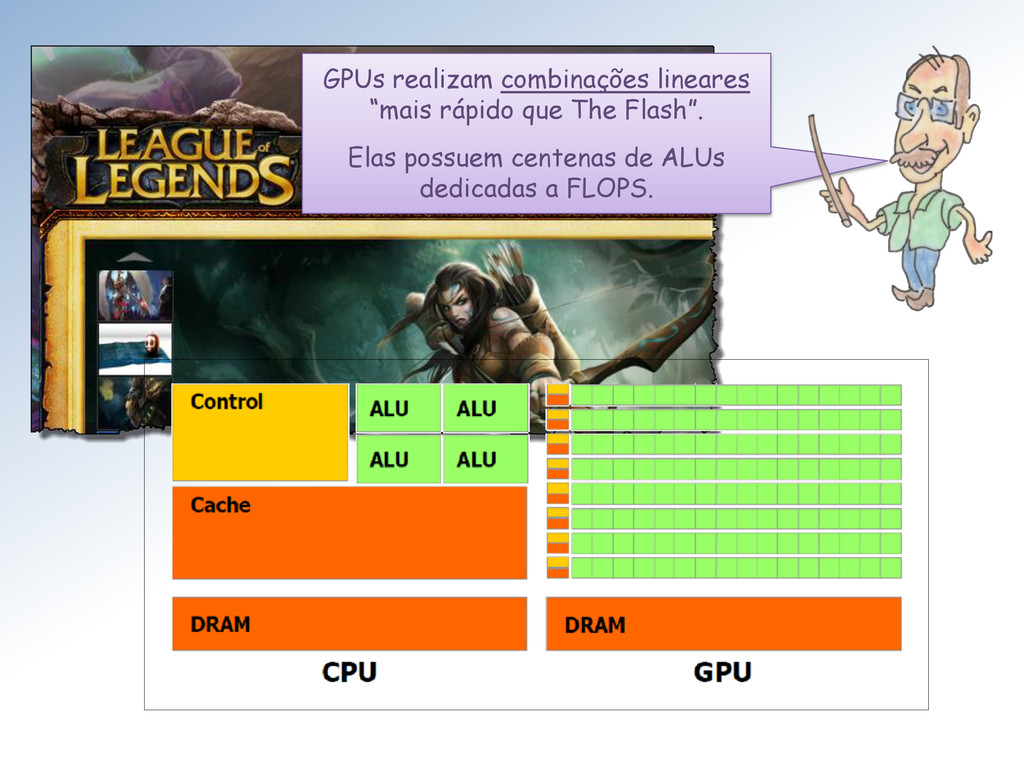
que mais poderemos fazer além de combinações desse tipo? Muitas coisas mais, minha filha, mas você lembrou-me de um termo importante. Mestres, podemos fazer pouca coisa com vetores. Só umas combinações tipo 2 3. −1. 2.5 + 0.5 0.4 1.5 2.0 .
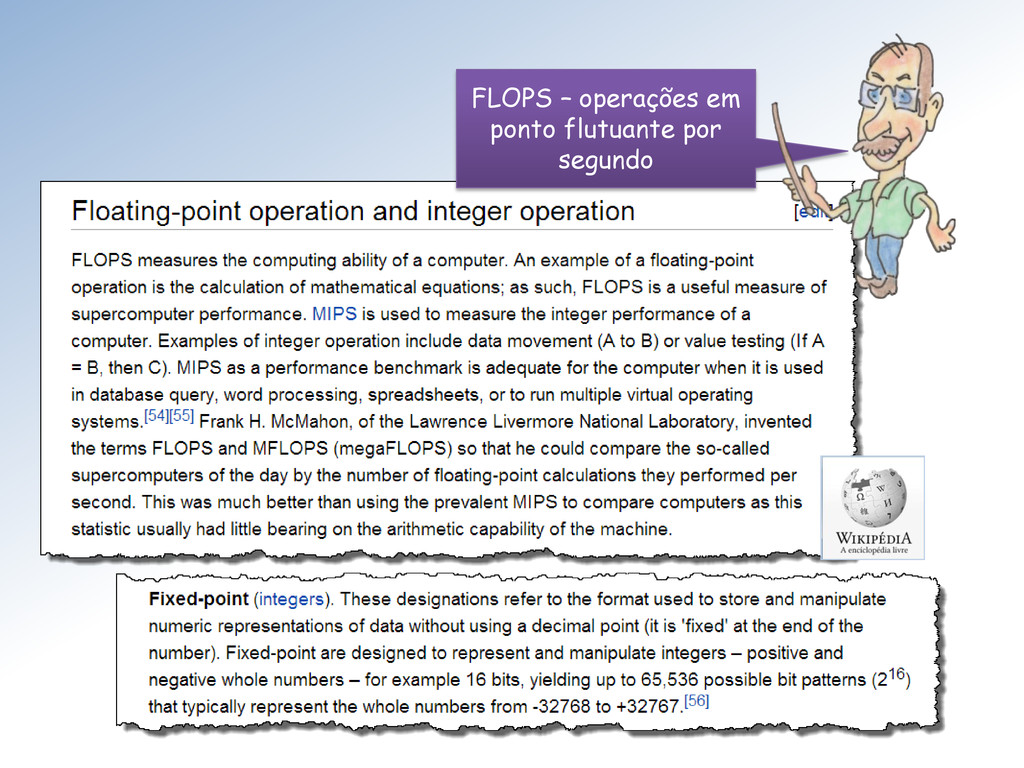
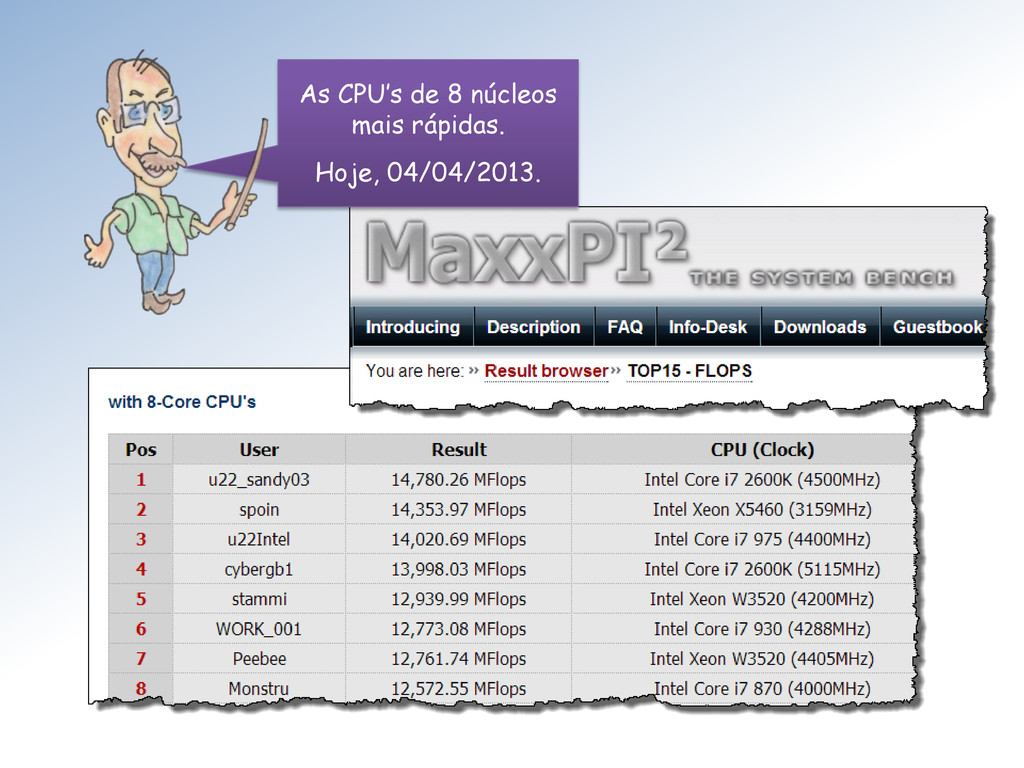
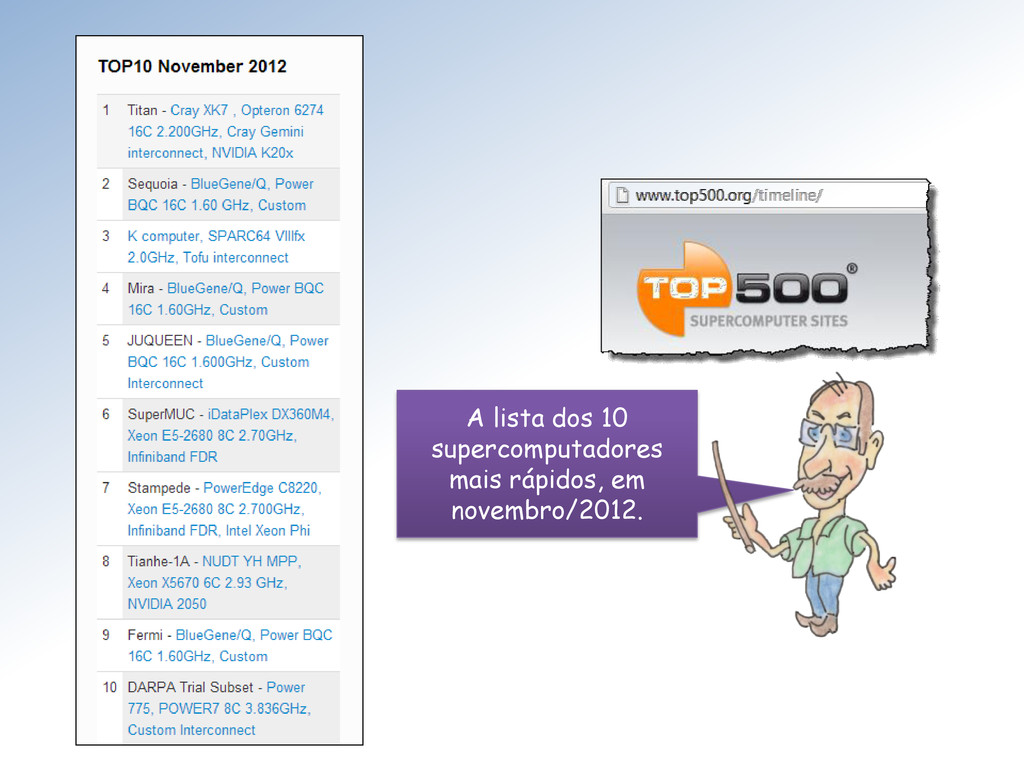
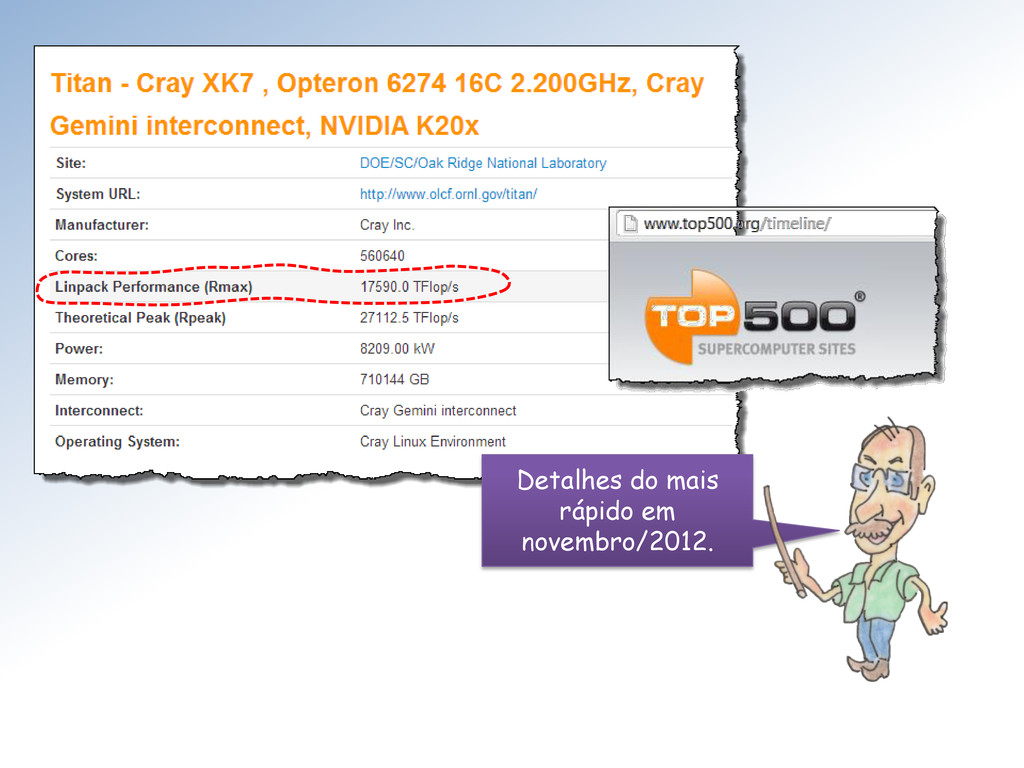
começou a funcionar em 1946, eles fazem isso. Foram criados para efetuar montanhas de adições e multiplicações. É, mas hoje fazem muito mais. Para jogar League of Legends preciso de acesso à Internet e de uma GPU para suportar os gráficos.
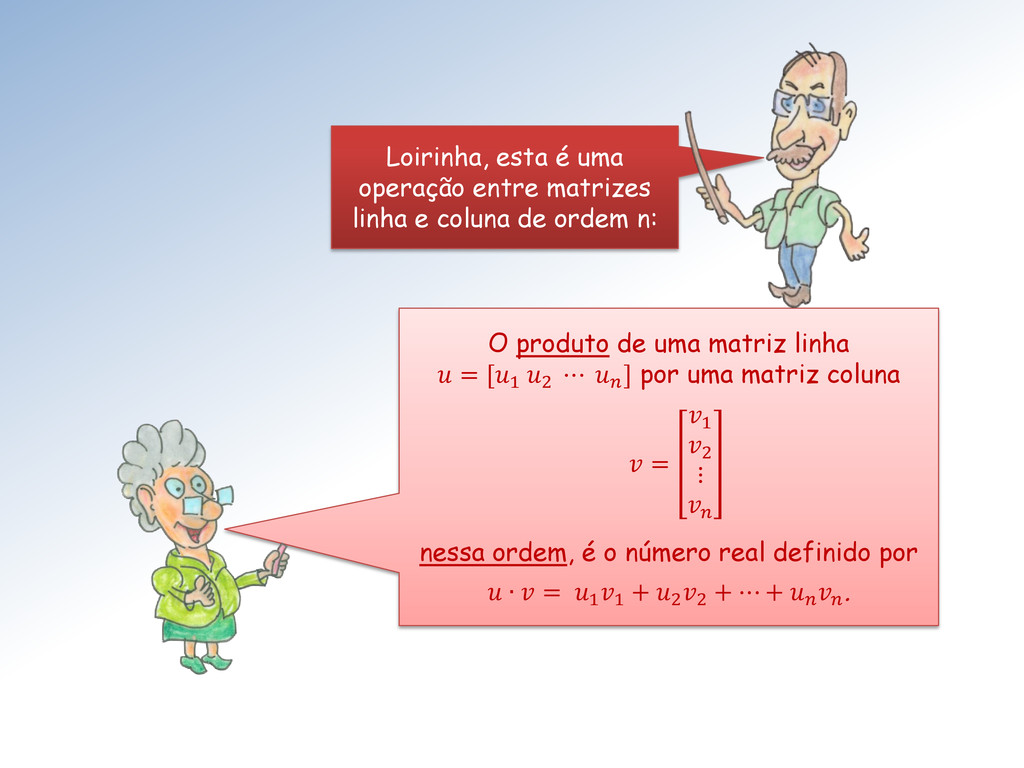
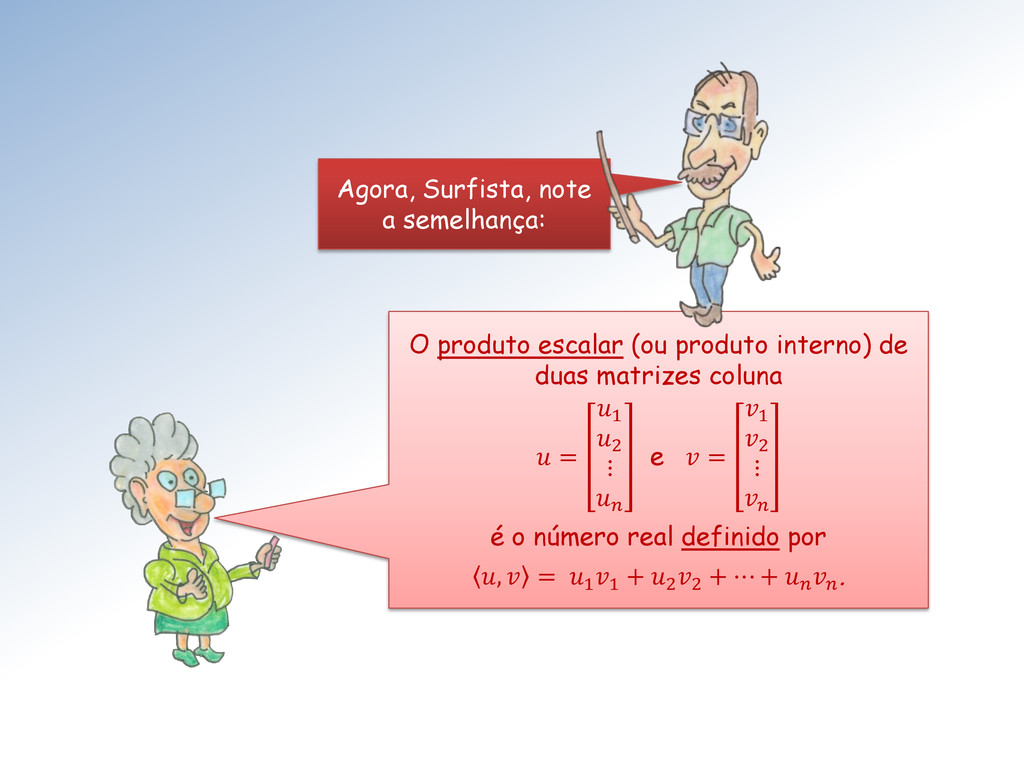
] por uma matriz coluna = 1 2 ⋮ nessa ordem, é o número real definido por ∙ = 1 1 + 2 2 + ⋯ + . Loirinha, esta é uma operação entre matrizes linha e coluna de ordem n:
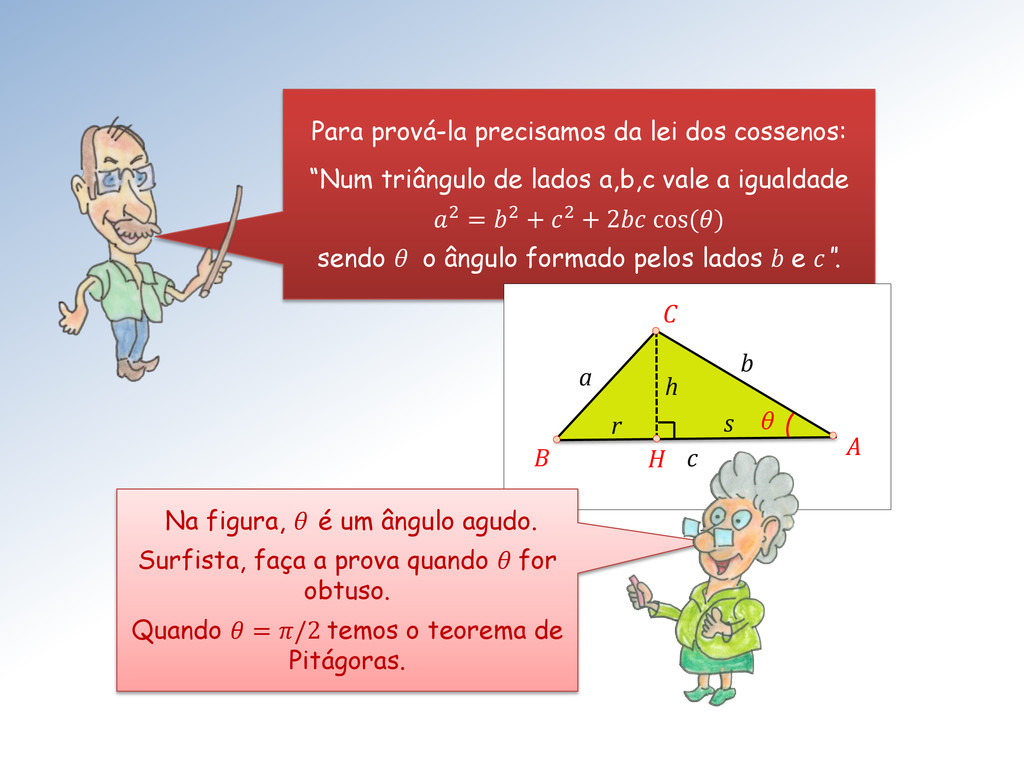
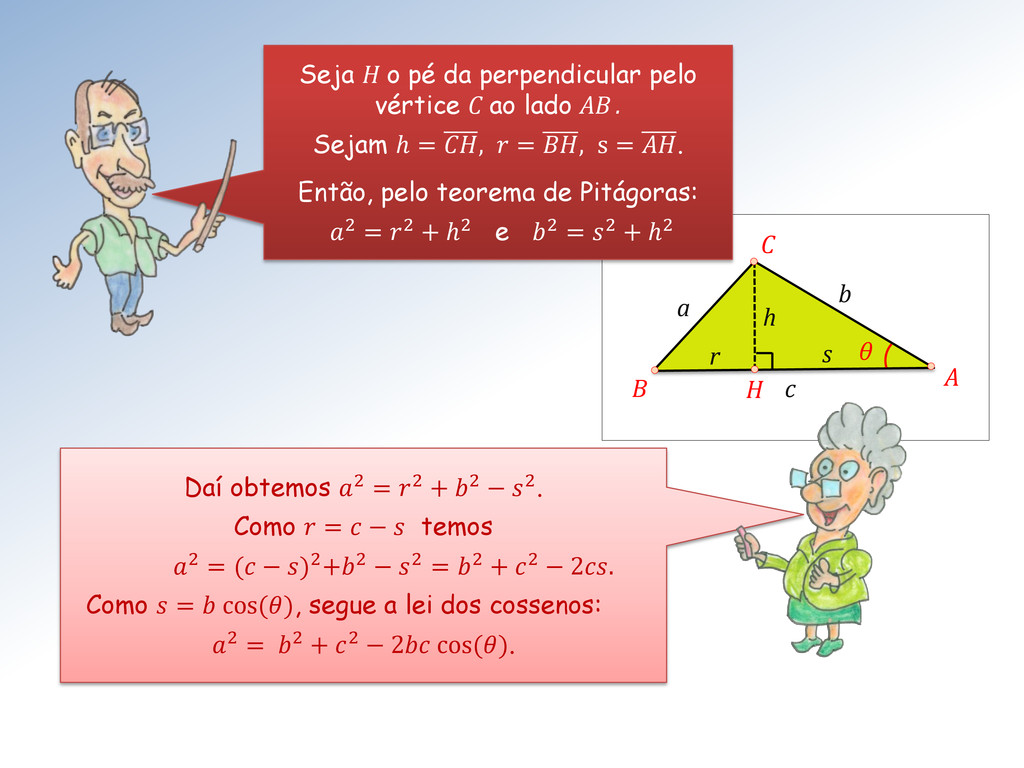
lados a,b,c vale a igualdade 2 = 2 + 2 + 2 cos () sendo θ o ângulo formado pelos lados b e c“. a b c θ A B C H s r h Na figura, θ é um ângulo agudo. Surfista, faça a prova quando θ for obtuso. Quando = /2 temos o teorema de Pitágoras.
h Seja H o pé da perpendicular pelo vértice C ao lado AB . Sejam ℎ = , = , s = . Então, pelo teorema de Pitágoras: 2 = 2 + ℎ2 e 2 = 2 + ℎ2 Daí obtemos 2 = 2 + 2 − 2. Como = − temos 2 = ( − )2+2 − 2 = 2 + 2 − 2. Como = cos (), segue a lei dos cossenos: 2 = 2 + 2 − 2 cos ().
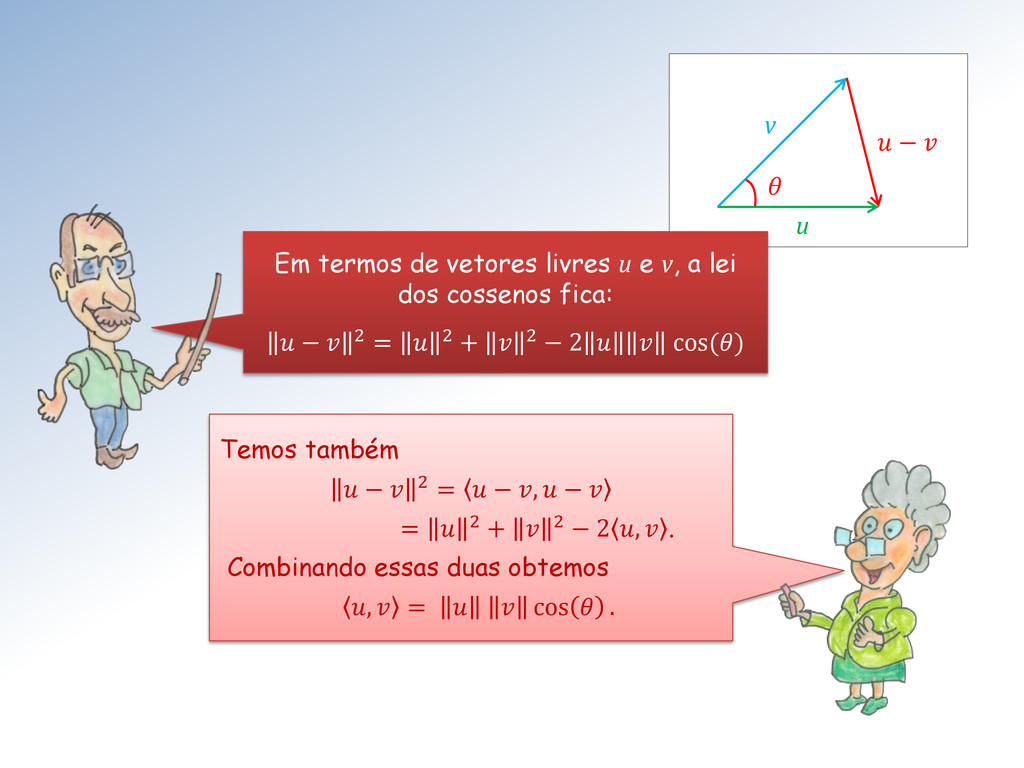
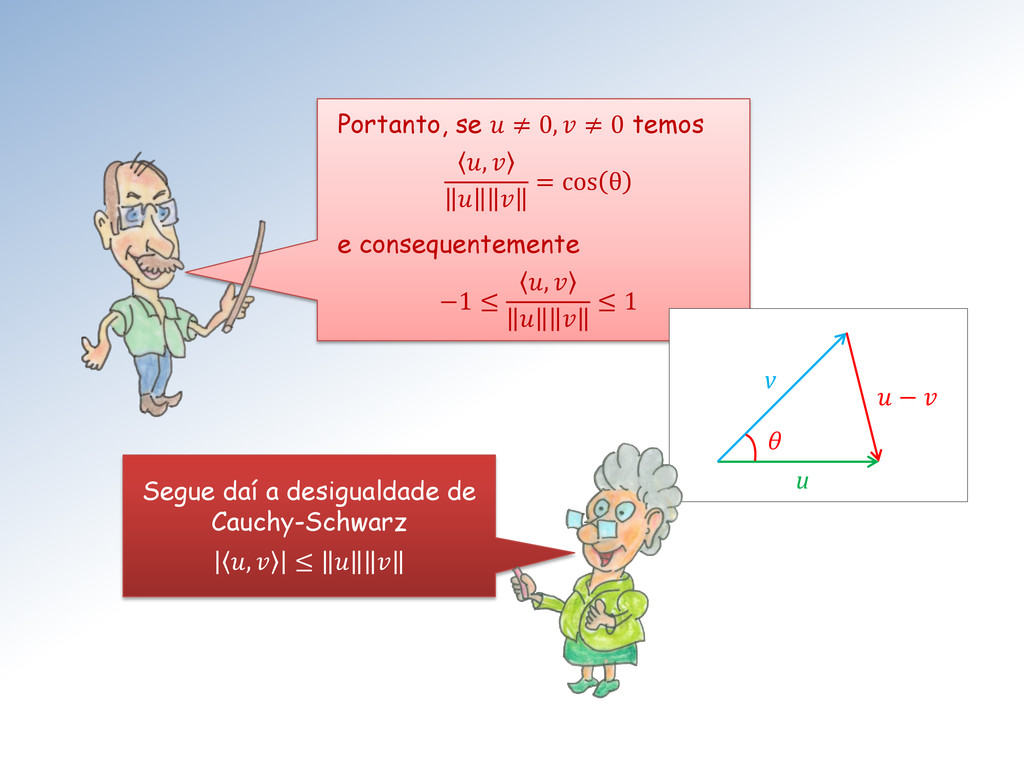
0 do espaço euclidiano n-dimensional pode ser calculado através da fórmula: = cos , Se é o ângulo entre dois vetores não-nulos u e v, então: • é agudo , > 0 • é obtuso , < 0 • = 2 , = 0. Neste caso u e v são ditos serem vetores ortogonais. θ v u
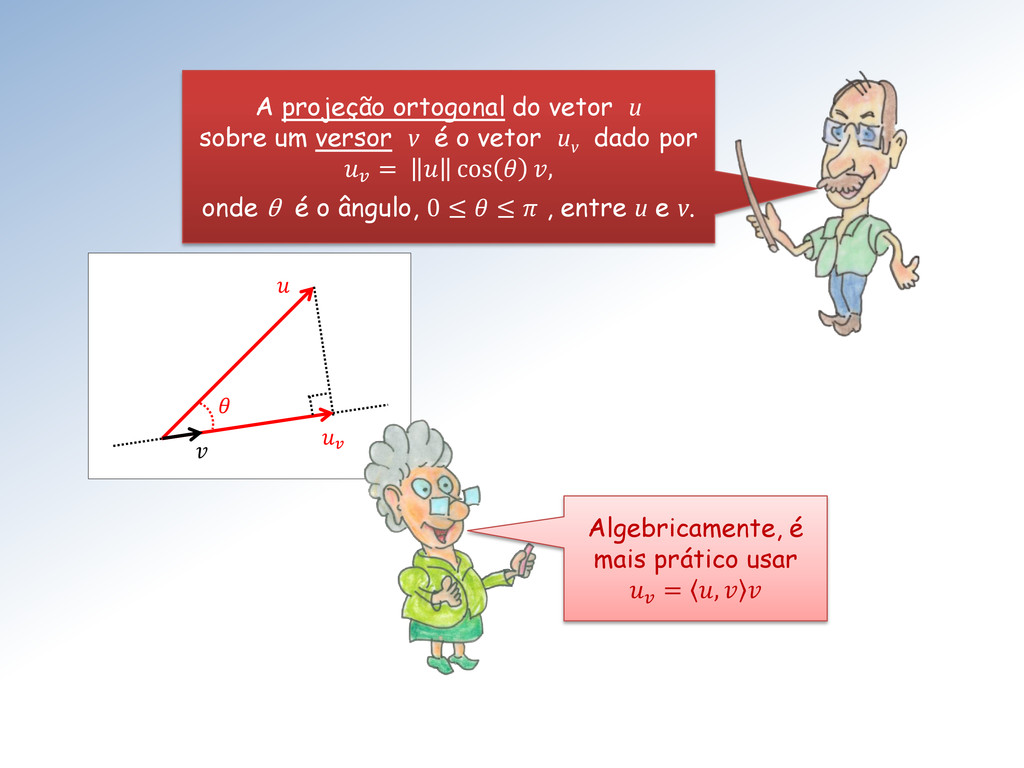
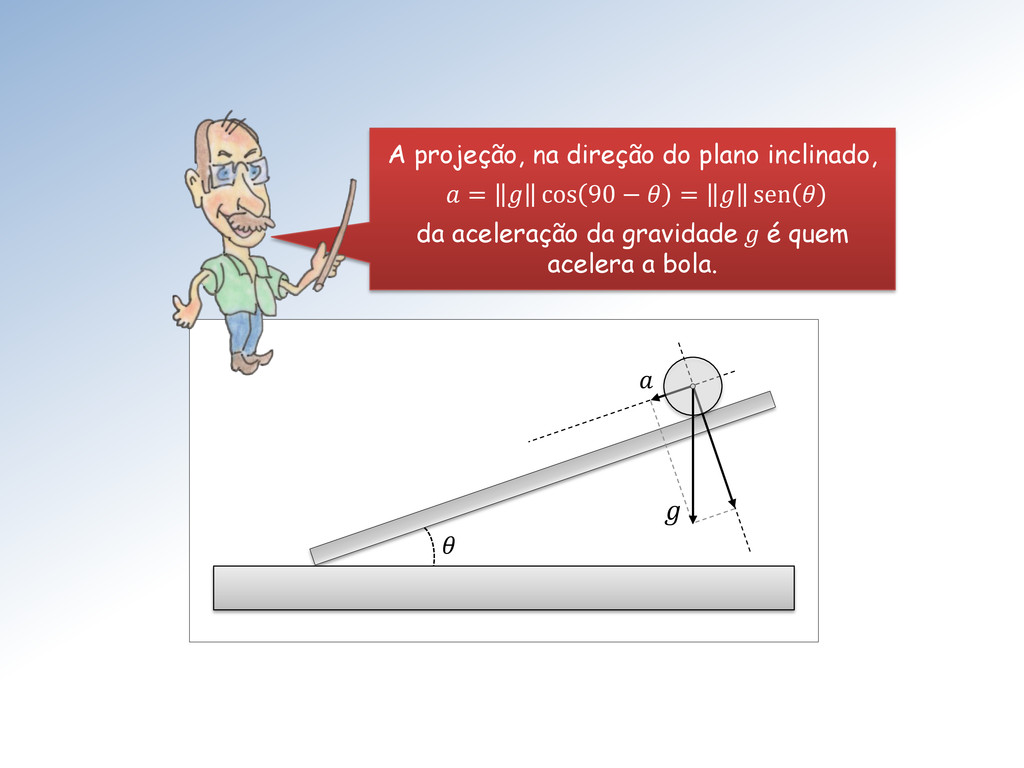
importantíssimo em álgebra linear, matemática e matemática aplicada. Projeções ortogonais são muito usadas por físicos e engenheiros para determinar a “componente de uma força” ou a “componente da velocidade” numa determinada direção.
Ensaiador: “ A filosofia está escrita neste grande livro, o universo... Ele está escrito na linguagem da matemática e seus caracteres são triângulos, círculos e outras figuras geométricas...”
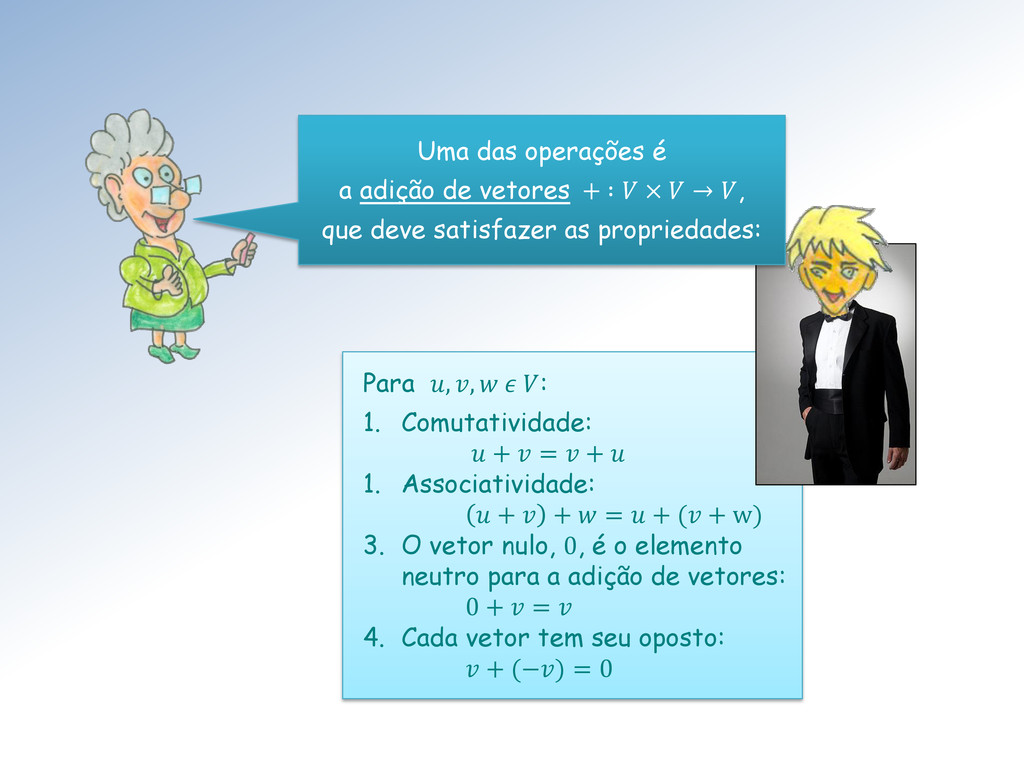
Associatividade: + + = + ( + w) 3. O vetor nulo, 0, é o elemento neutro para a adição de vetores: 0 + = 4. Cada vetor tem seu oposto: + (−) = 0 Uma das operações é a adição de vetores + ∶ × → , que deve satisfazer as propriedades:
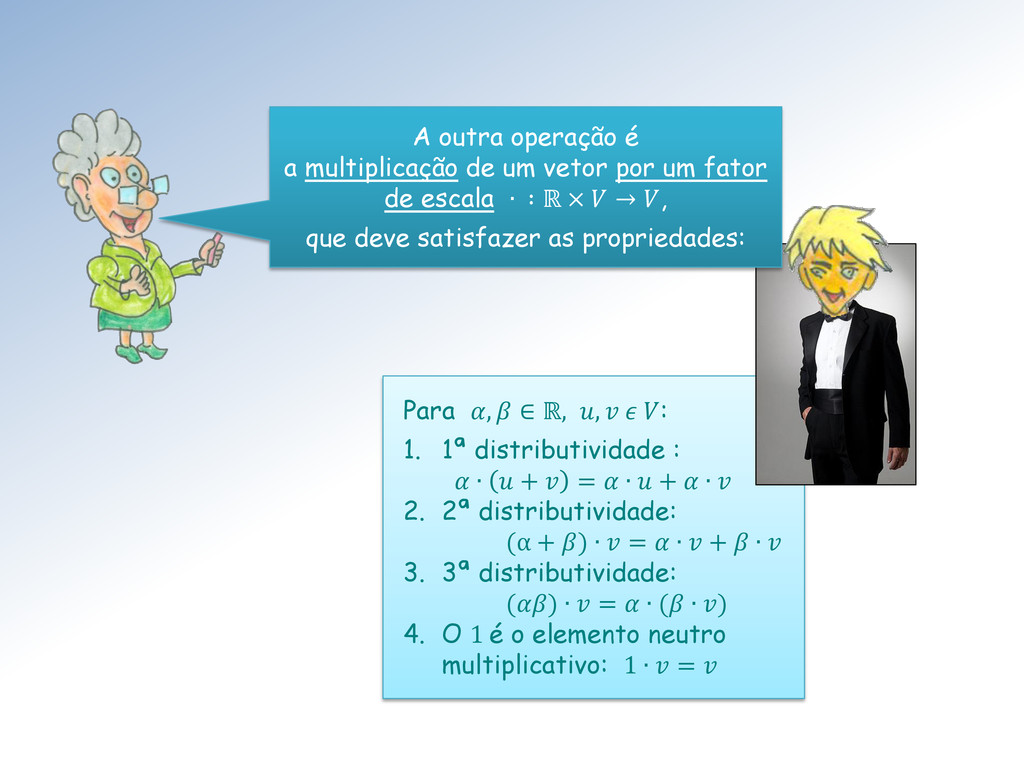
∙ + = ∙ + ∙ 2. 2ª distributividade: (α + ) ∙ = ∙ + ∙ 3. 3ª distributividade: () ∙ = ∙ ( ∙ ) 4. O 1 é o elemento neutro multiplicativo: 1 ∙ = A outra operação é a multiplicação de um vetor por um fator de escala ∙ ∶ ℝ × → , que deve satisfazer as propriedades:
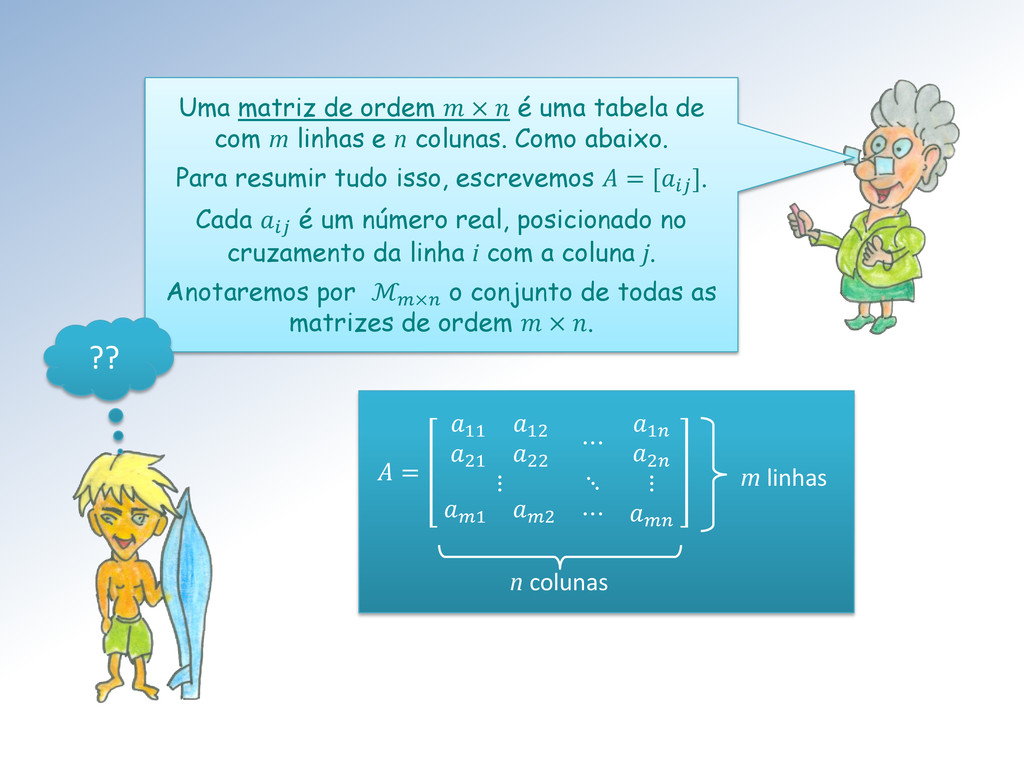
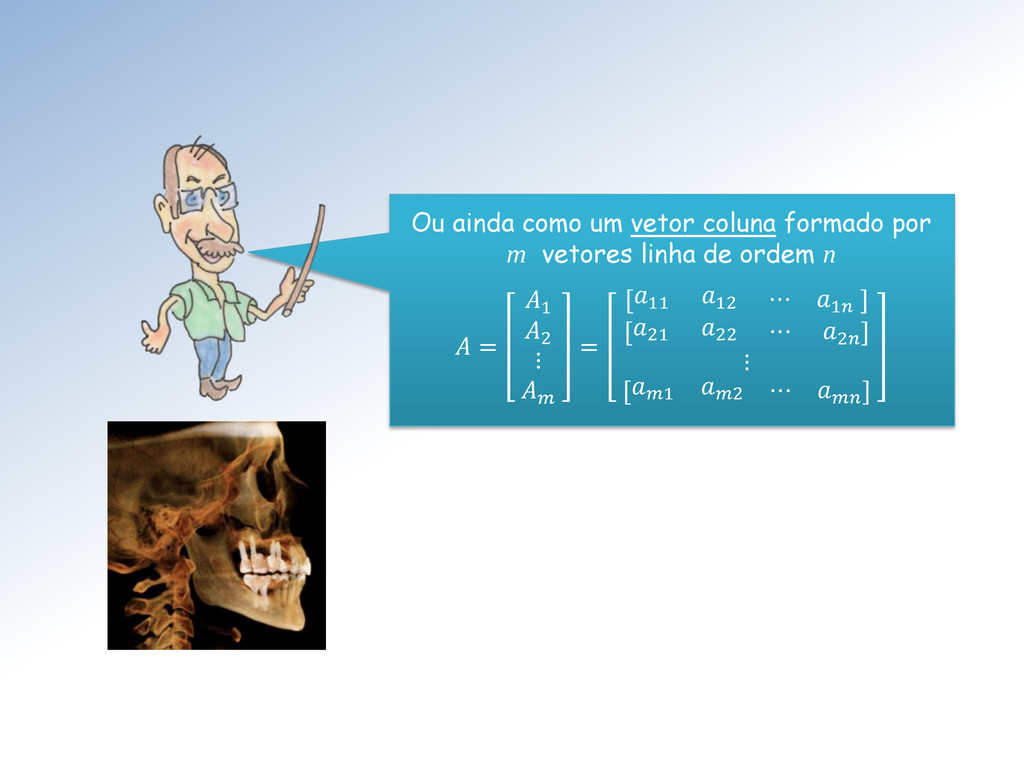
m linhas e n colunas. Como abaixo. Para resumir tudo isso, escrevemos = [ ]. Cada é um número real, posicionado no cruzamento da linha i com a coluna j. Anotaremos por ℳ× o conjunto de todas as matrizes de ordem × . = 11 12 21 22 ⋯ 1 2 ⋮ ⋱ ⋮ 1 2 ⋯ m linhas n colunas ??
ser somados e escalados. E precisam cumprir as oito propriedades listadas na definição. Sim, temos que saber somar matrizes e multiplicá-las por números reais. E verificar que elas satisfazem as oito propriedades.
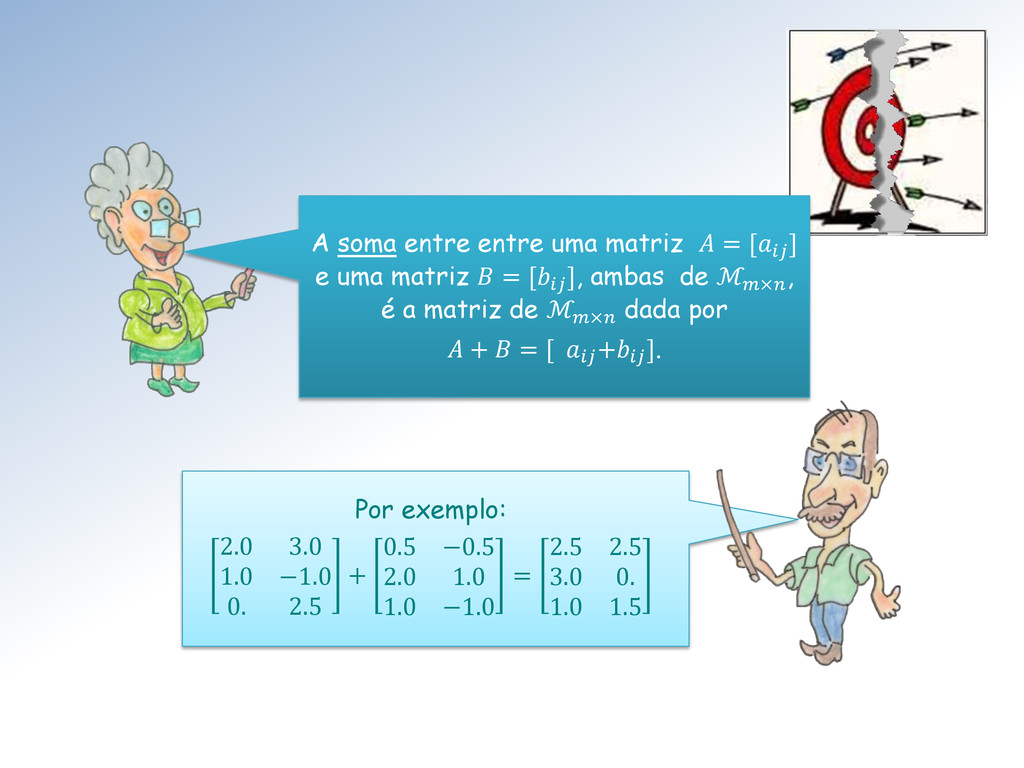
−0.5 2.0 1.0 1.0 −1.0 = 2.5 2.5 3.0 0. 1.0 1.5 A soma entre entre uma matriz = [ ] e uma matriz = [ ], ambas de ℳ× , é a matriz de ℳ× dada por + = [ + ].
e uma matriz = [ ] de ℳ× é a matriz de ℳ× definida por = [ ]. Para = 2. e = 1.1 0.7 −1.4 2.3 temos = 2.∗ 1.1 2.∗ 0.7 2 ∗ (−1.4) 2 ∗ 2.3 = 2.2 1.4 −2.8 4.6 .
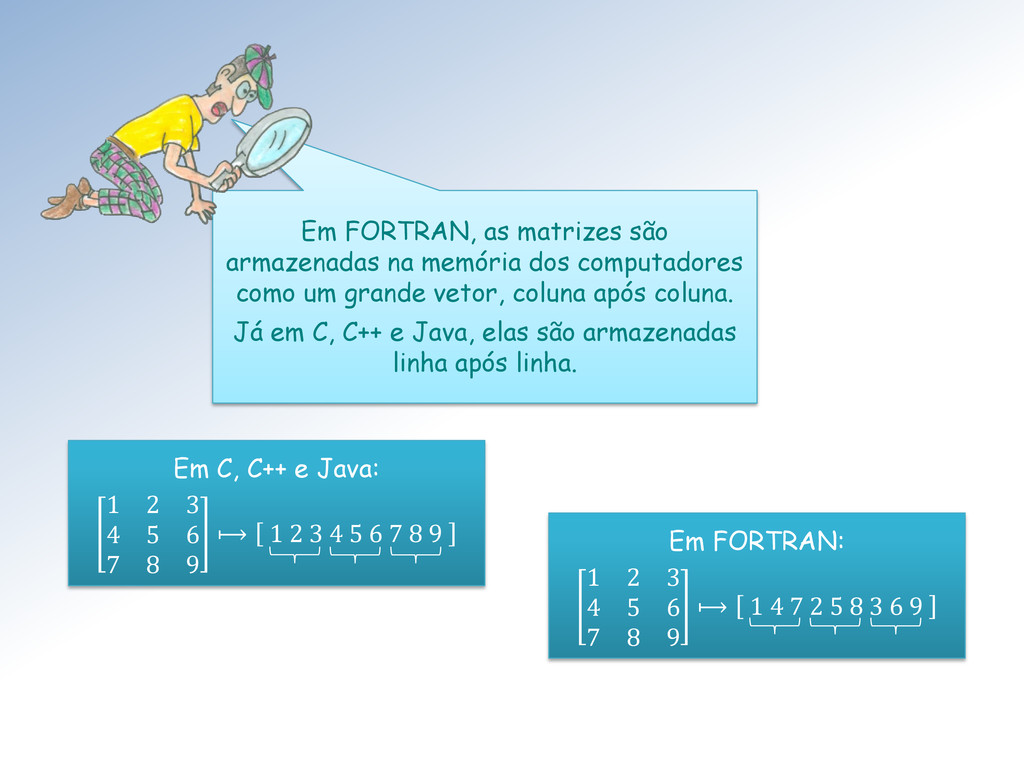
como um grande vetor, coluna após coluna. Já em C, C++ e Java, elas são armazenadas linha após linha. Em C, C++ e Java: 1 2 3 4 5 6 7 8 9 ⟼ 1 2 3 4 5 6 7 8 9 Em FORTRAN: 1 2 3 4 5 6 7 8 9 ⟼ 1 4 7 2 5 8 3 6 9
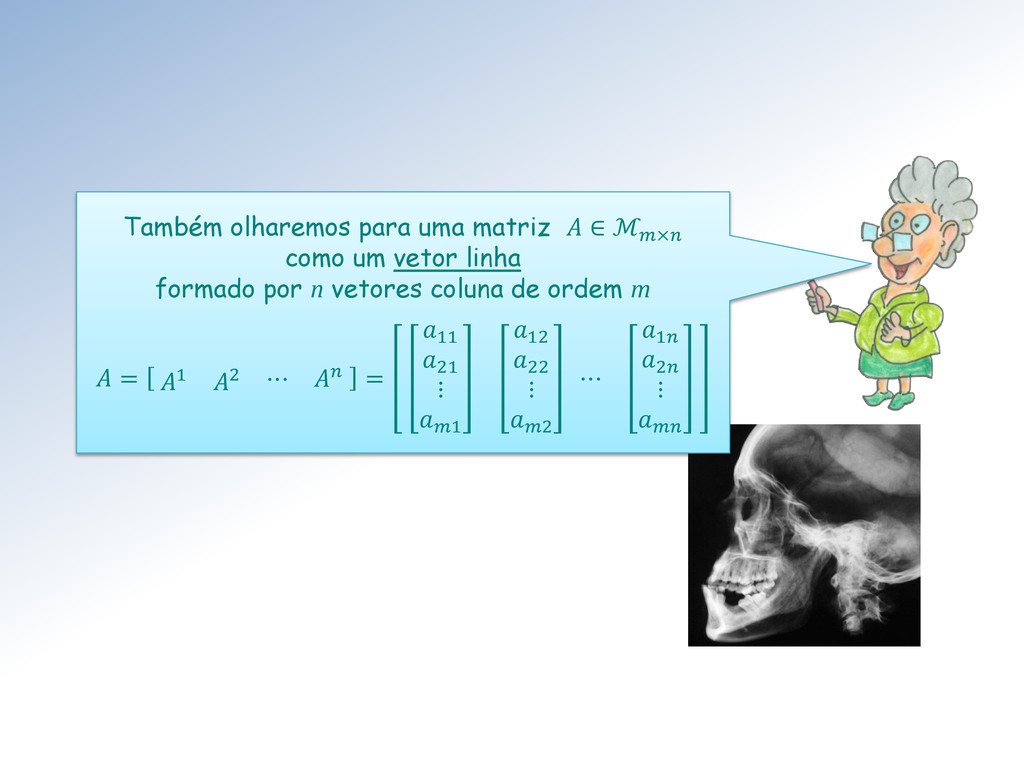
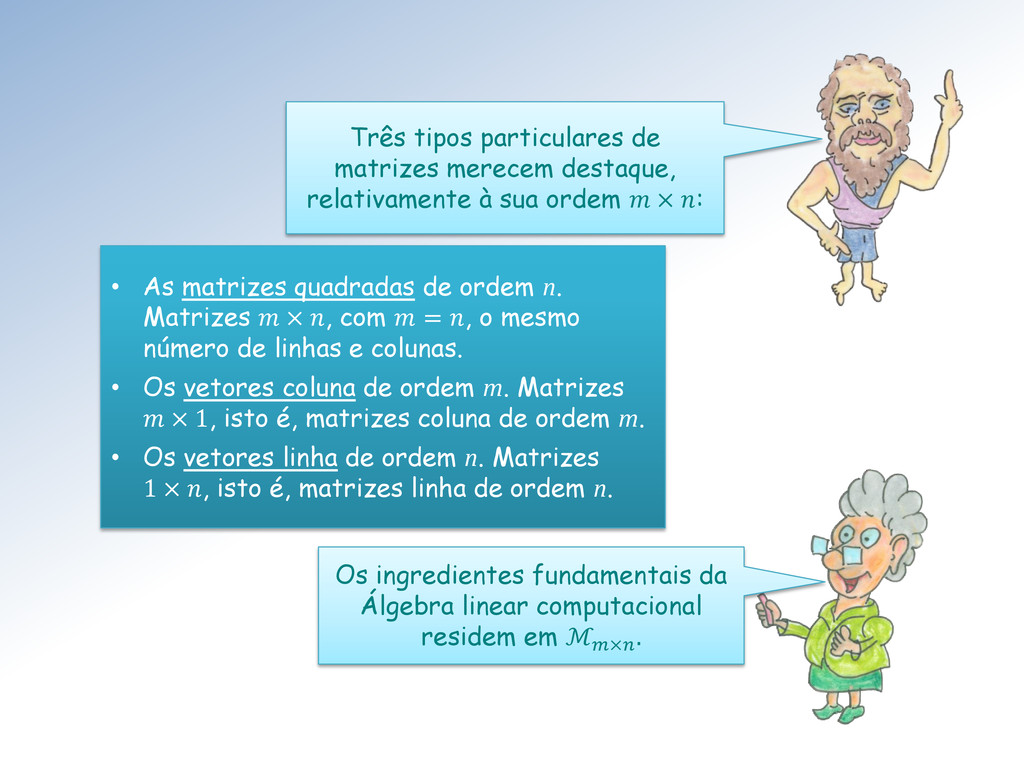
com = , o mesmo número de linhas e colunas. • Os vetores coluna de ordem m. Matrizes × 1, isto é, matrizes coluna de ordem m. • Os vetores linha de ordem n. Matrizes 1 × , isto é, matrizes linha de ordem n. Três tipos particulares de matrizes merecem destaque, relativamente à sua ordem × : Os ingredientes fundamentais da Álgebra linear computacional residem em ℳ× .
multiplicação de um número por uma matriz. • A multiplicação direta entre duas matrizes de mesma ordem. São muitas as operações possíveis entre matrizes. Já vimos duas. Uma terceira fornece o produto direto.
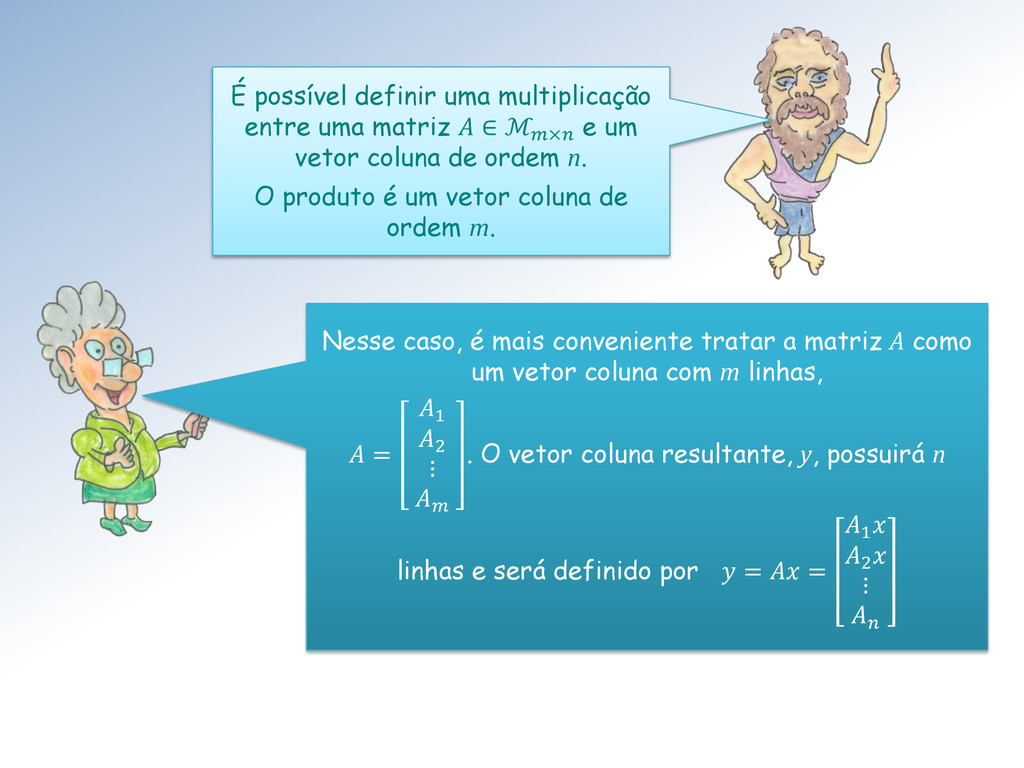
e um vetor coluna de ordem n. O produto é um vetor coluna de ordem m. Nesse caso, é mais conveniente tratar a matriz A como um vetor coluna com m linhas, = 1 2 ⋮ . O vetor coluna resultante, y, possuirá n linhas e será definido por = = 1 2 ⋮
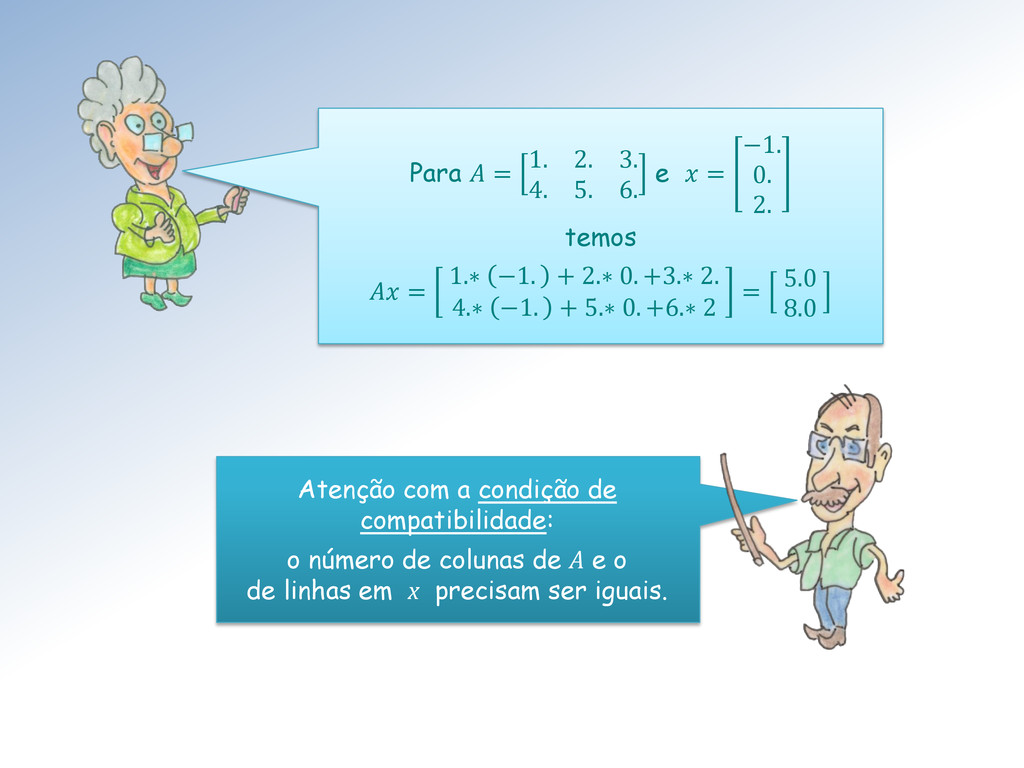
−1. 0. 2. temos = 1.∗ −1. + 2.∗ 0. +3.∗ 2. 4.∗ −1. + 5.∗ 0. +6.∗ 2 = 5.0 8.0 Atenção com a condição de compatibilidade: o número de colunas de A e o de linhas em x precisam ser iguais.
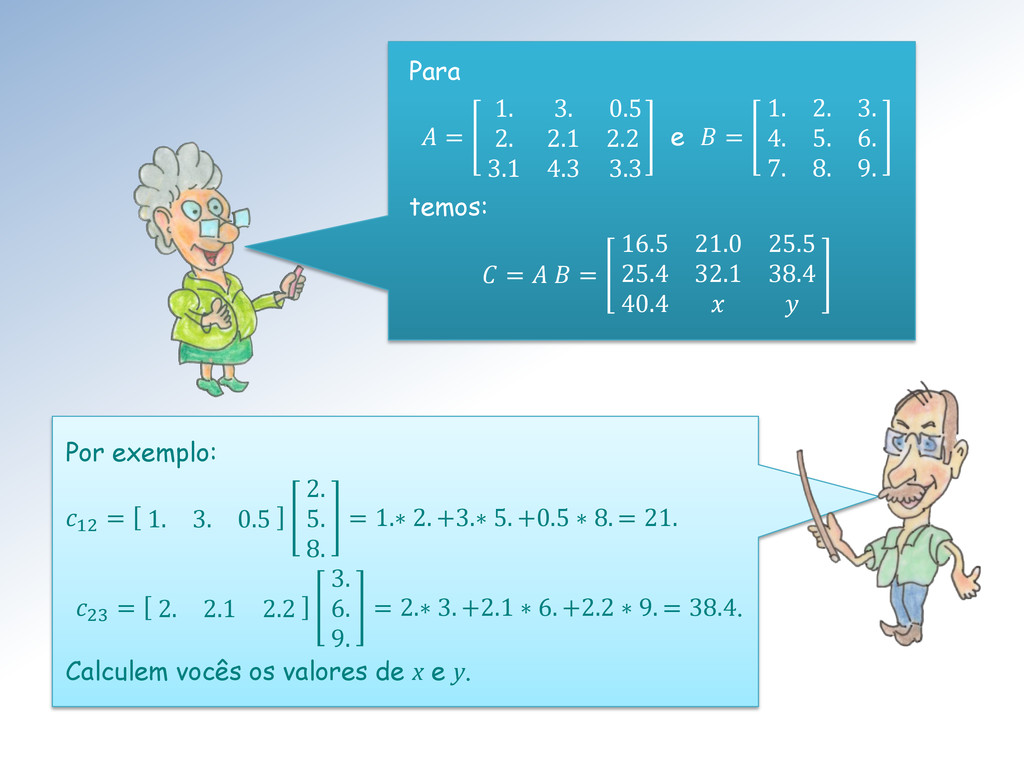
uma multiplicação entre matrizes A e B. É claro que temos que respeitar a condição de compatibilidade. Em outras palavras, o produto só estará definido quando ∈ ℳ× e ∈ ℳ× . O produto AB será uma matriz de ℳ×
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![O produto direto entre uma matriz = [ ] e](https://files.speakerdeck.com/presentations/3e3322d09503013066ae7e72ba47199d/slide_91.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}