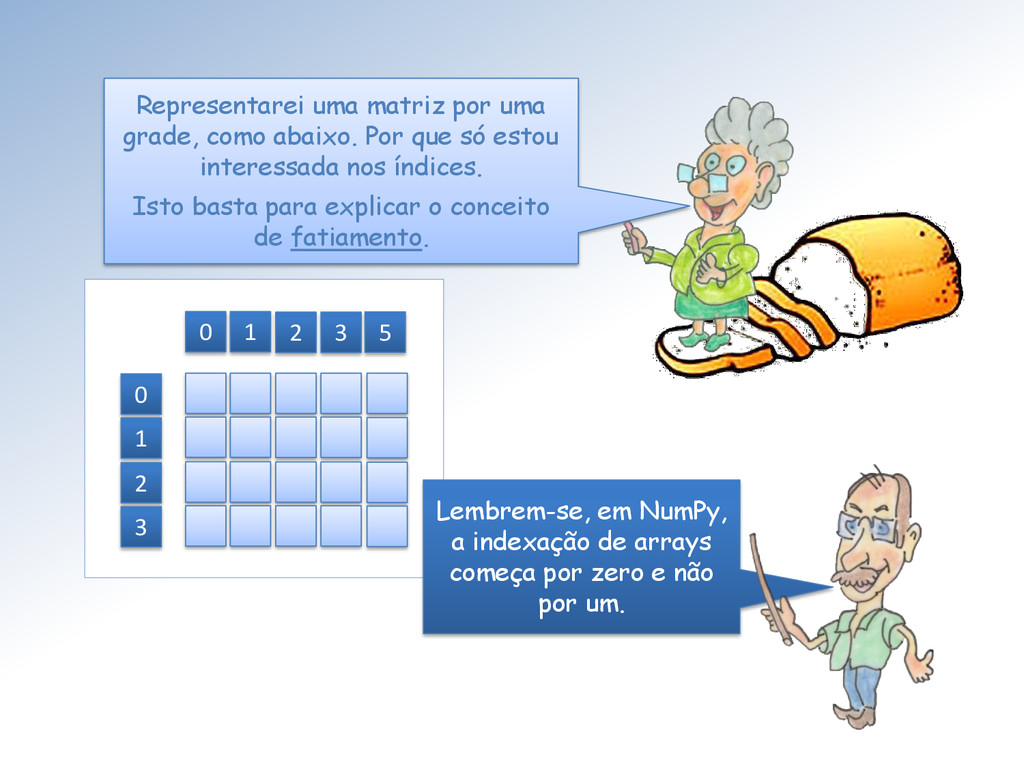
só estou interessada nos índices. Isto basta para explicar o conceito de fatiamento. 0 1 2 3 0 1 2 3 5 Lembrem-se, em NumPy, a indexação de arrays começa por zero e não por um.
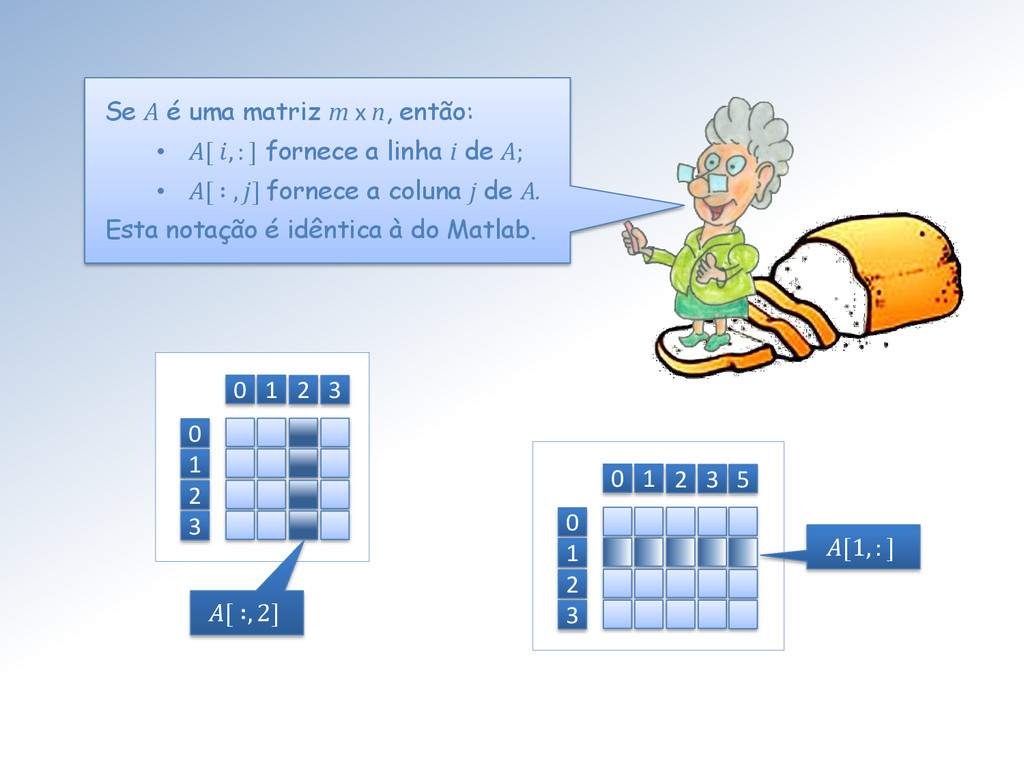
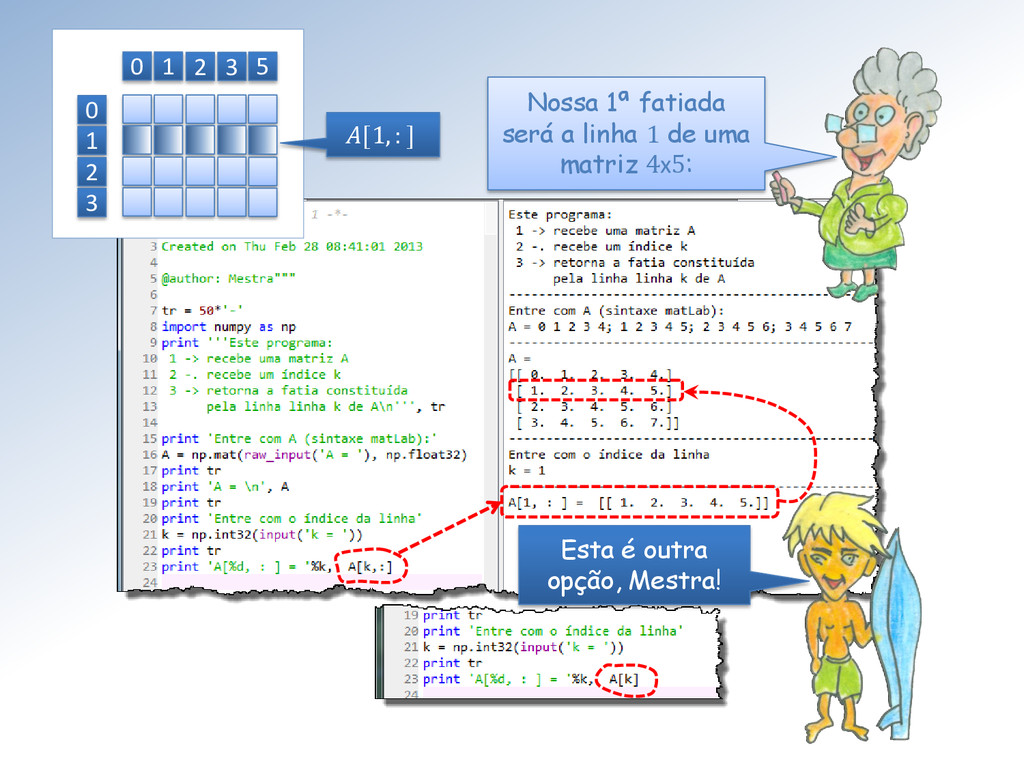
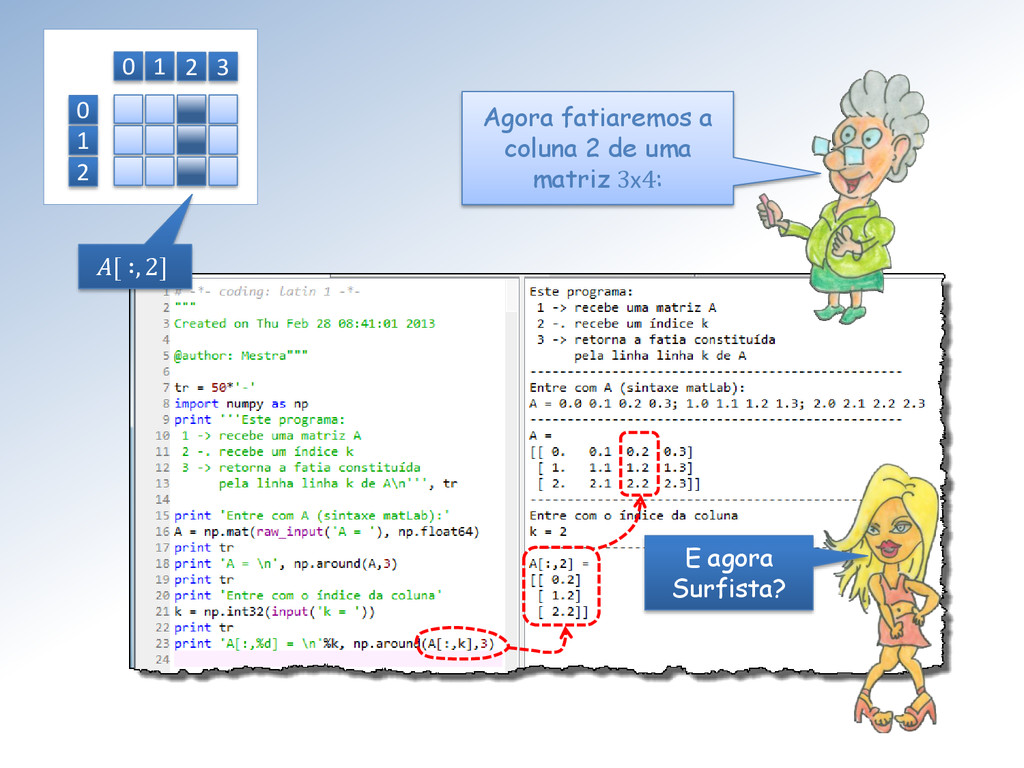
A é uma matriz m x n, então: • [ , : ] fornece a linha i de A; • [ ∶ , ] fornece a coluna j de A. Esta notação é idêntica à do Matlab. [1, : ] 0 1 2 3 0 1 2 3 [ ∶, 2]
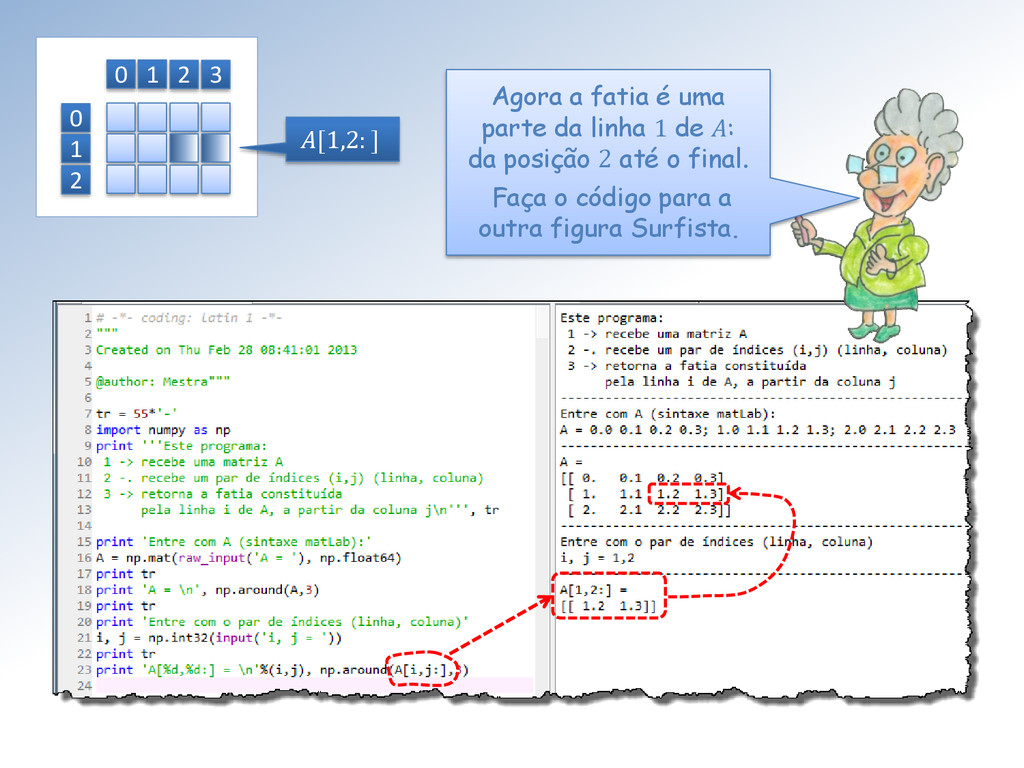
uma matriz m x n, então: • [ , : ] fornece a linha i de A, de j em diante; • [ : , ] fornece a coluna j de A, de i para baixo. [1,2: ] 0 1 2 3 0 1 2 3 [ 1: , 0]
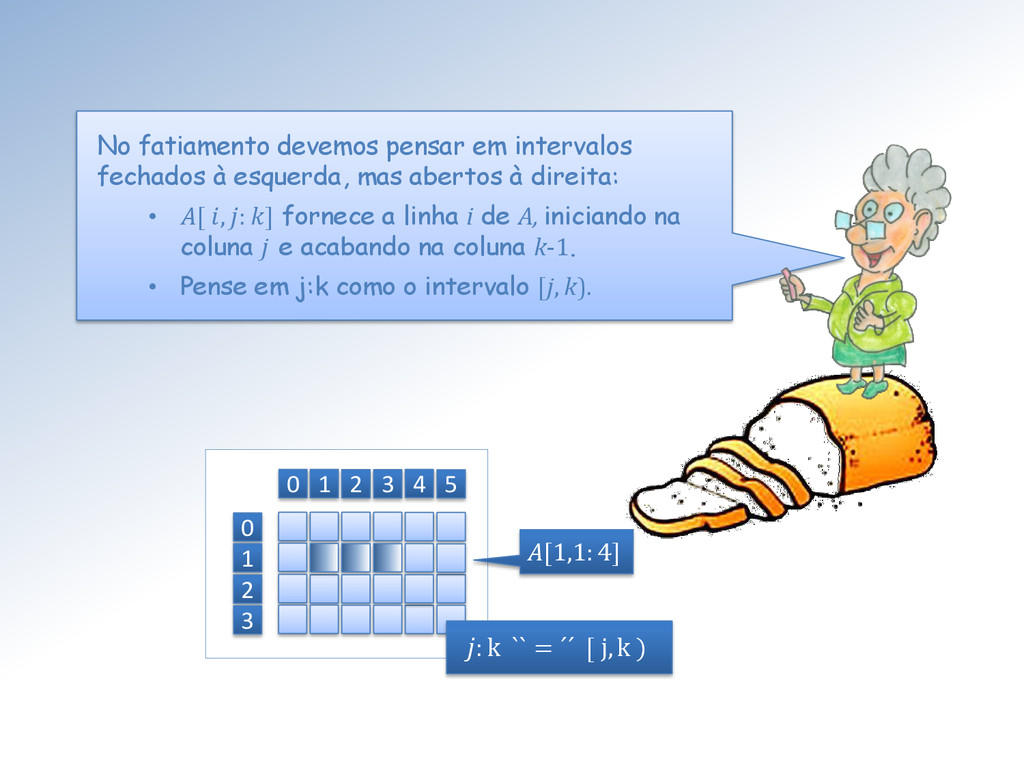
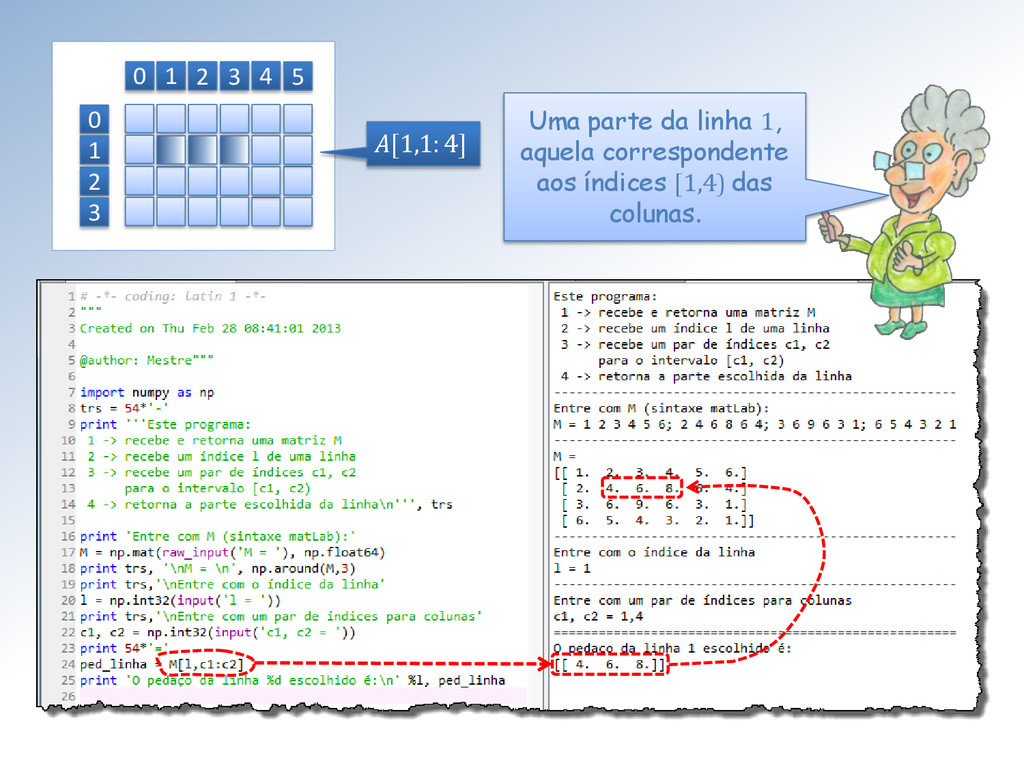
abertos à direita: • [ , : ] fornece a linha i de A, iniciando na coluna j e acabando na coluna k-1. • Pense em j:k como o intervalo [j, k). 0 1 2 3 0 1 2 3 4 5 [1,1: 4] : k `` = ´´ [ j, k )
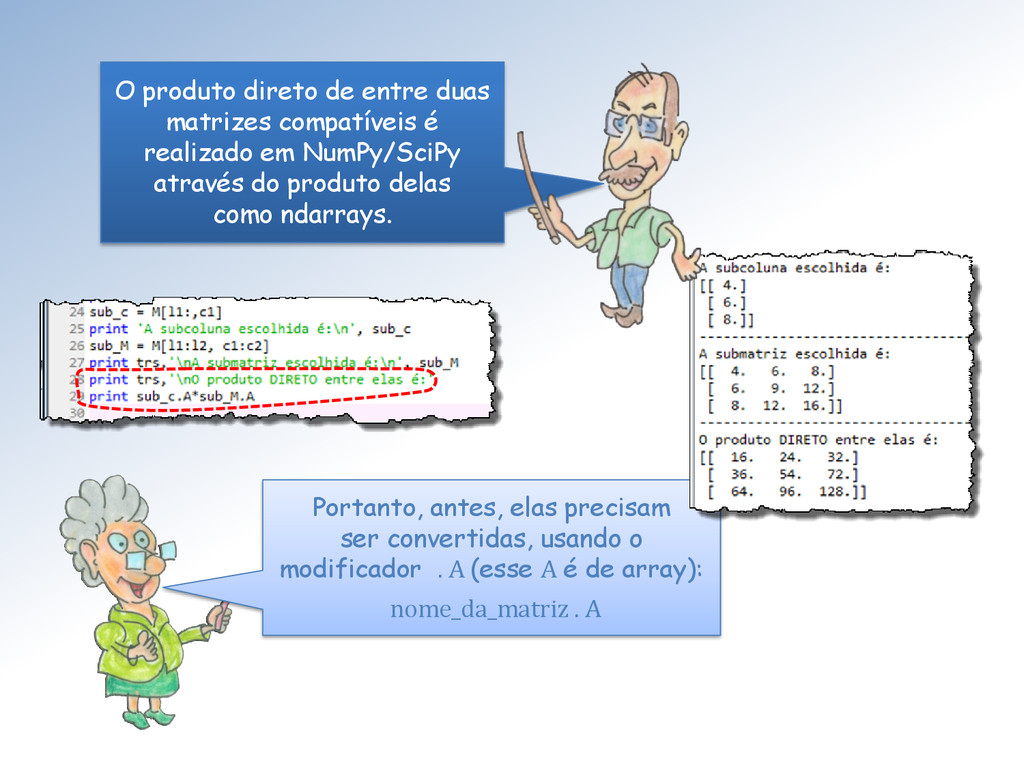
A (esse A é de array): nome_da_matriz . A O produto direto de entre duas matrizes compatíveis é realizado em NumPy/SciPy através do produto delas como ndarrays.
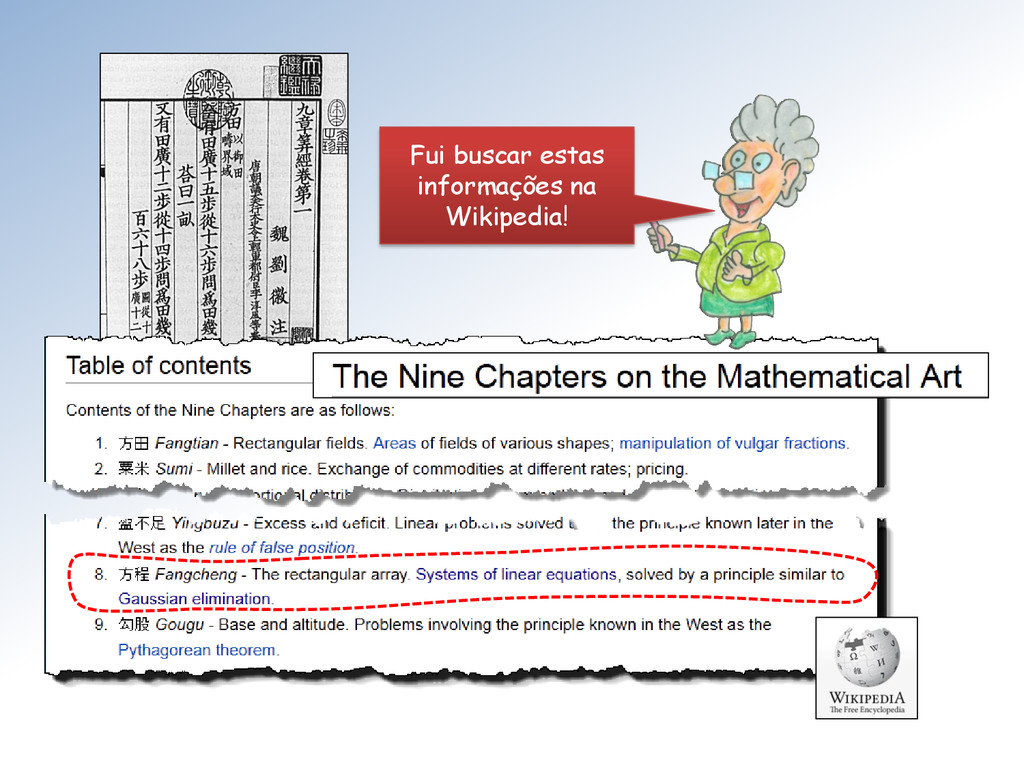
famoso Método de Eliminação, de Gauss. Na verdade ele não foi criado por Gauss. Ele já aparece no cap. 8 do livro chinês “Os nove capítulos sobre a arte matemática”, composto por gerações de mestres ao longo dos séculos X a II A.C.
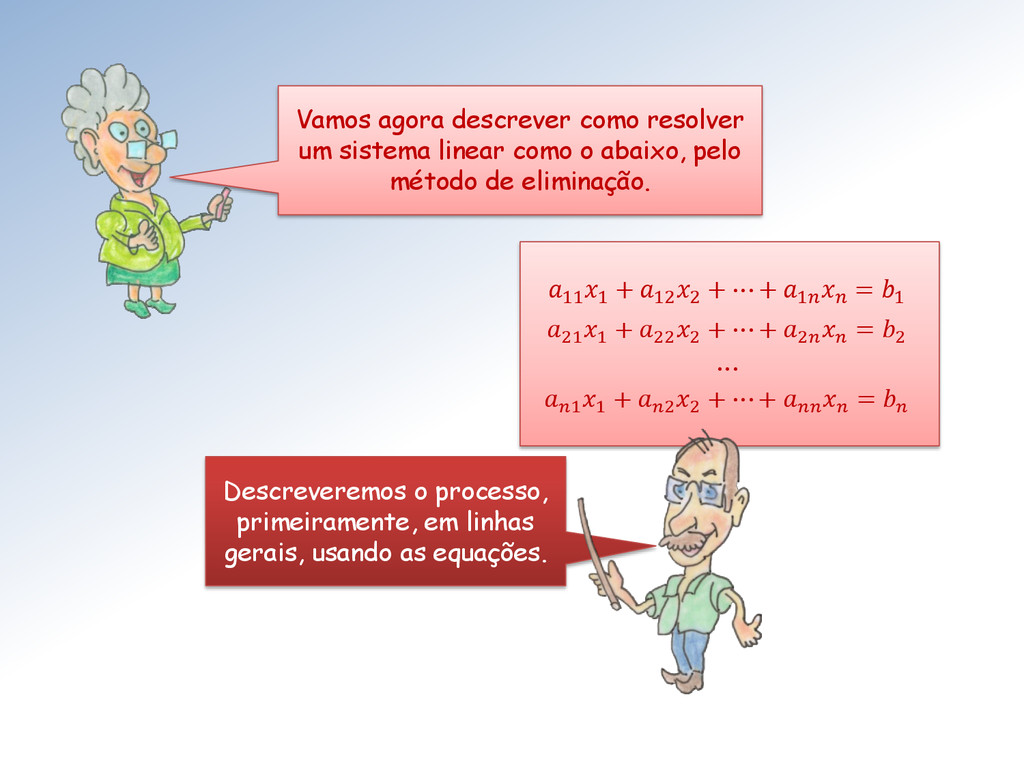
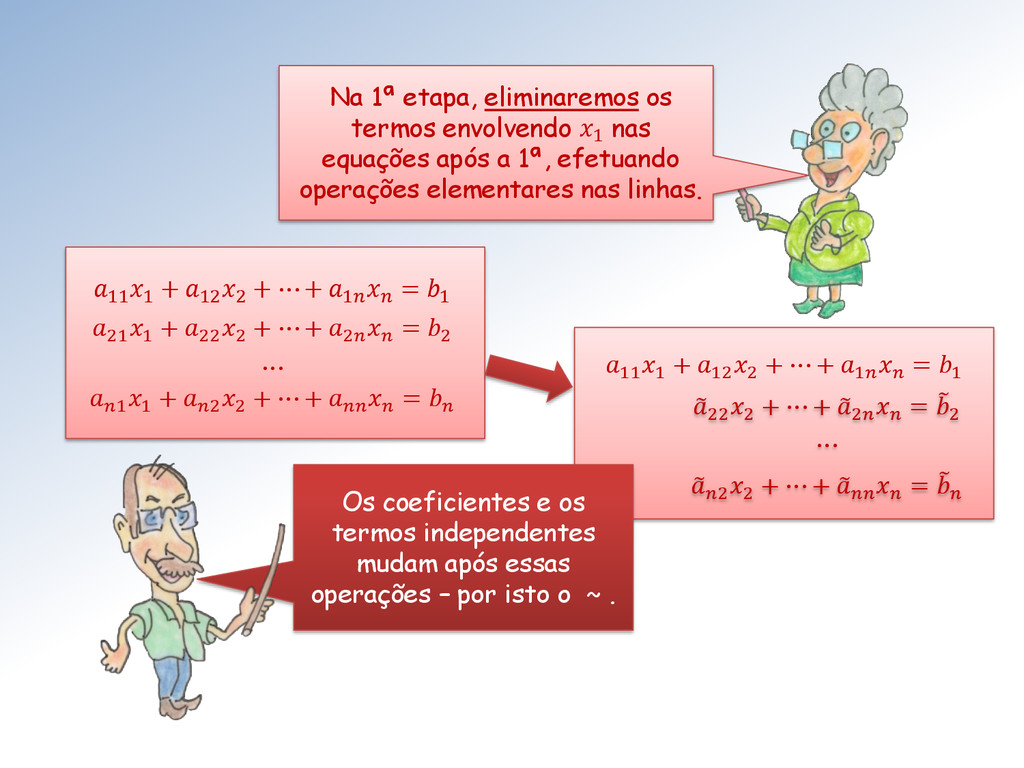
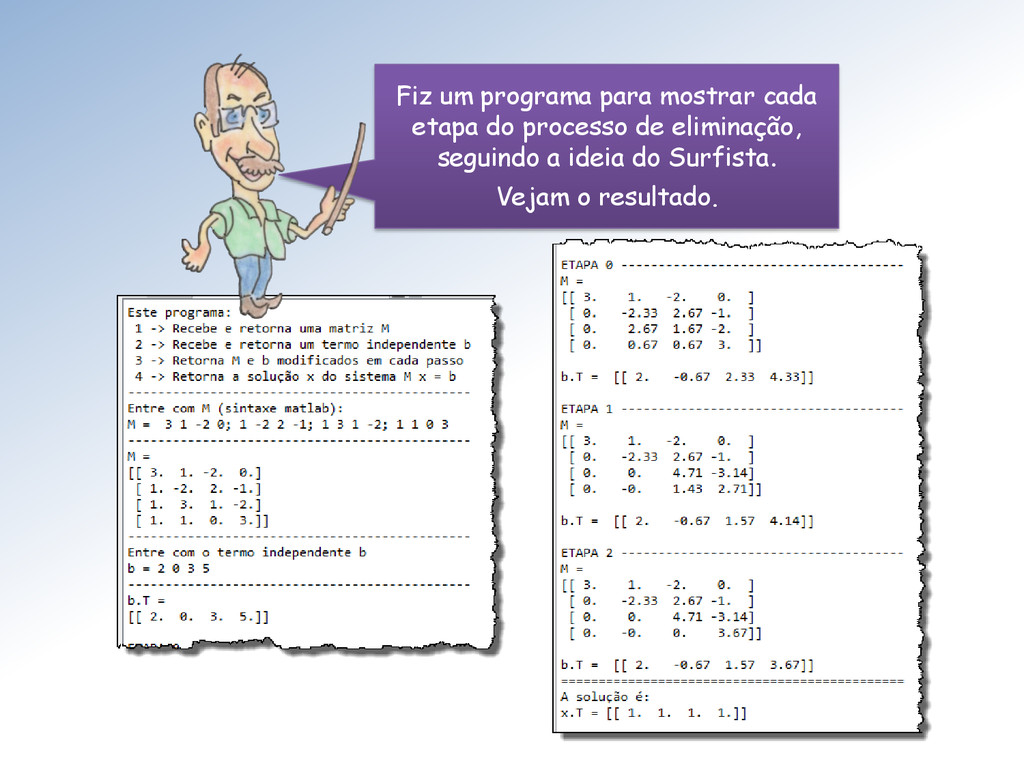
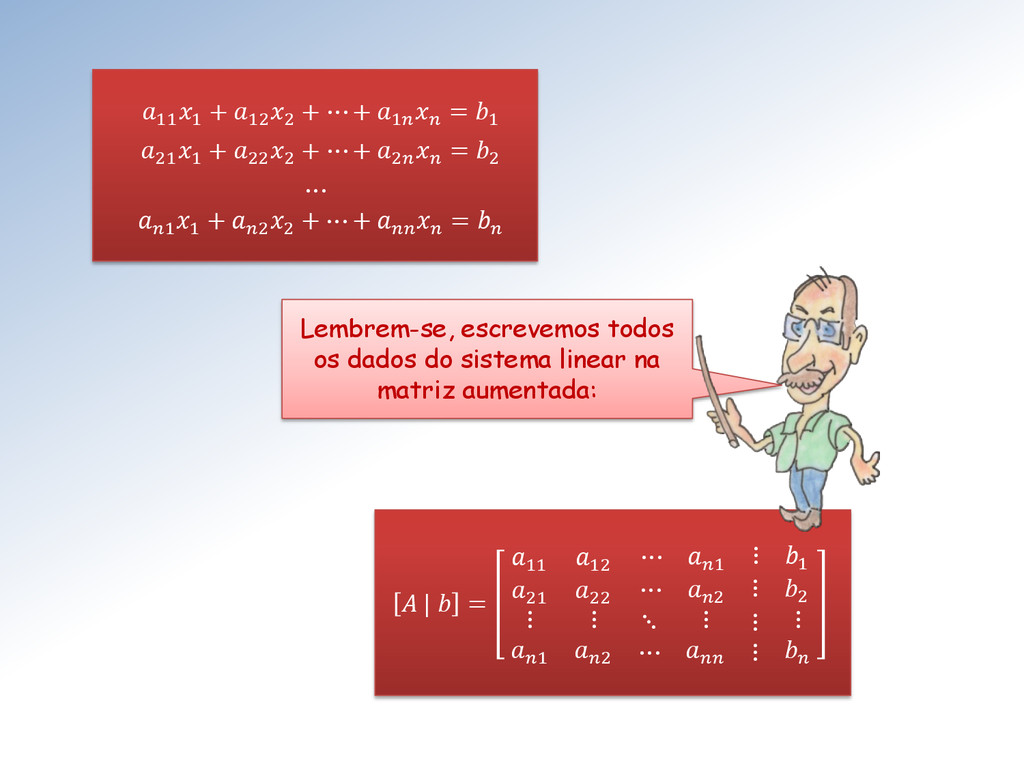
1 21 1 + 22 2 + ⋯ + 2 = 2 ⋯ 1 1 + 2 2 + ⋯ + = Vamos agora descrever como resolver um sistema linear como o abaixo, pelo método de eliminação. Descreveremos o processo, primeiramente, em linhas gerais, usando as equações.
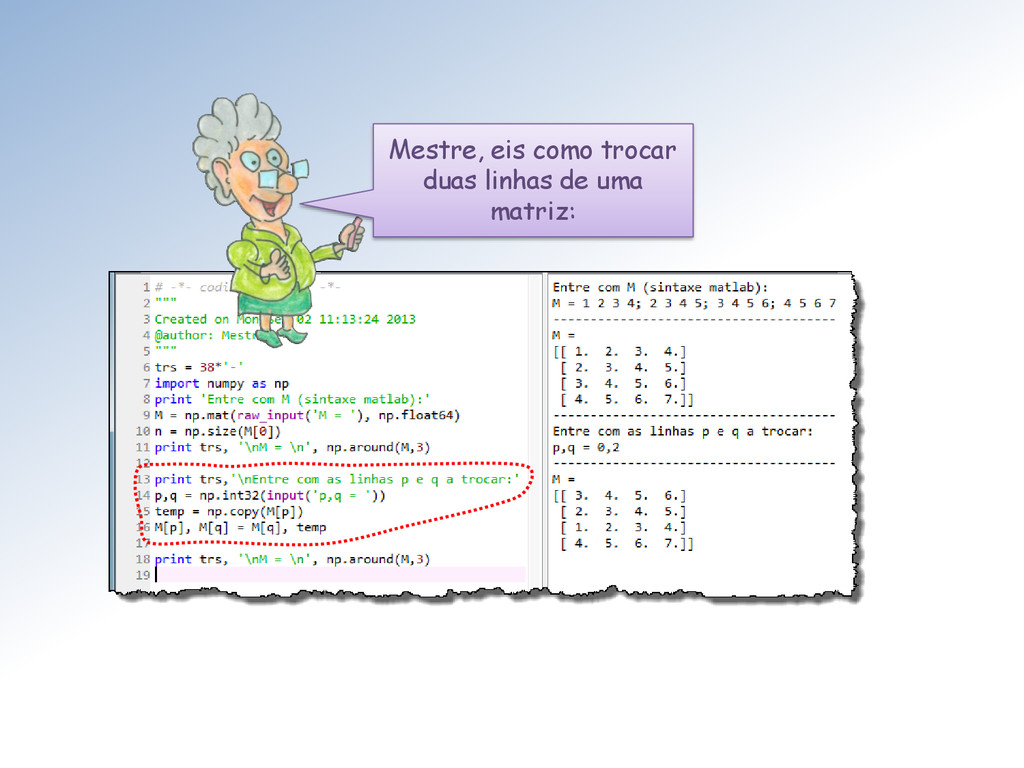
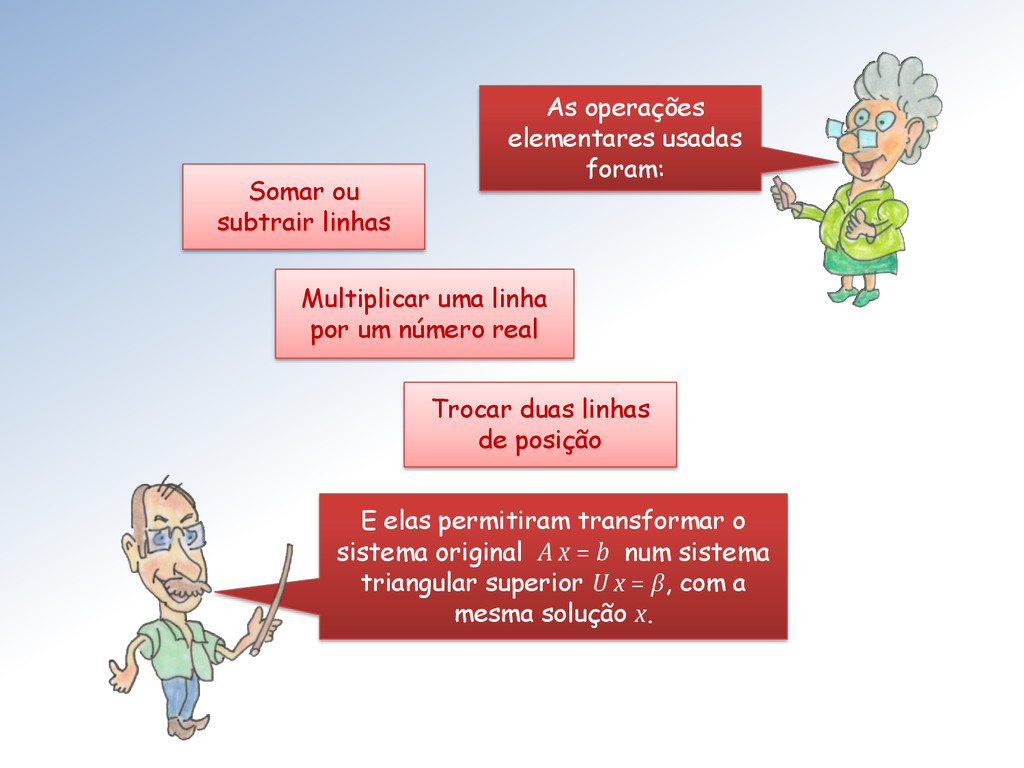
são três: Somar ou subtrair linhas Multiplicar uma linha por um número real Trocar duas linhas de posição Nosso objetivo será atingido após várias etapas consecutivas.
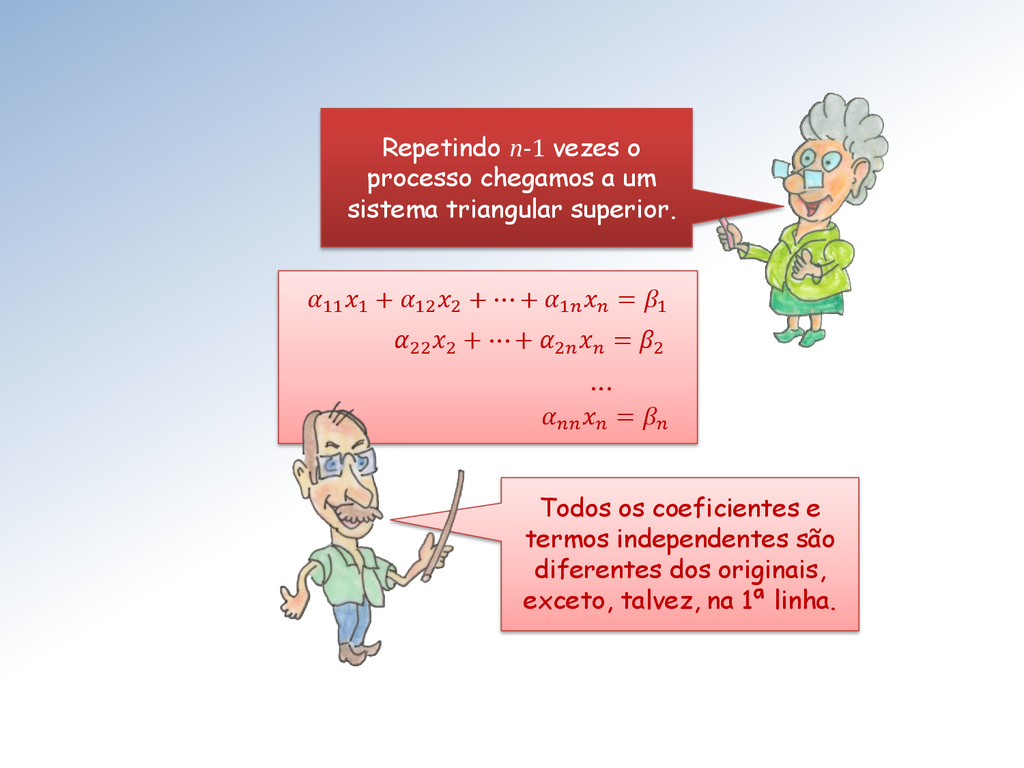
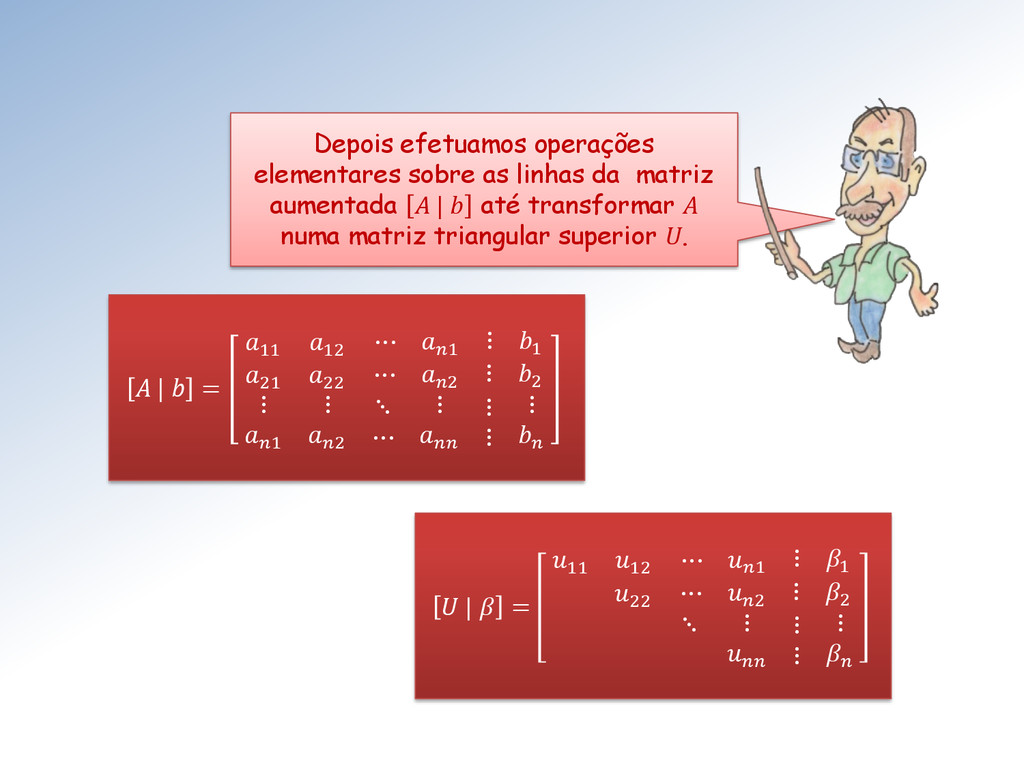
superior. 11 1 + 12 2 + ⋯ + 1 = 1 = 22 2 + ⋯ + 2 = 2 ⋯ Todos os coeficientes e termos independentes são diferentes dos originais, exceto, talvez, na 1ª linha.
extremamente simples. A parte trabalhosa do processo consiste, portanto, em eliminarmos incógnitas nas equações. Daí o nome: processo de eliminação. Os textos de Álgebra linear falam em escalonamento.
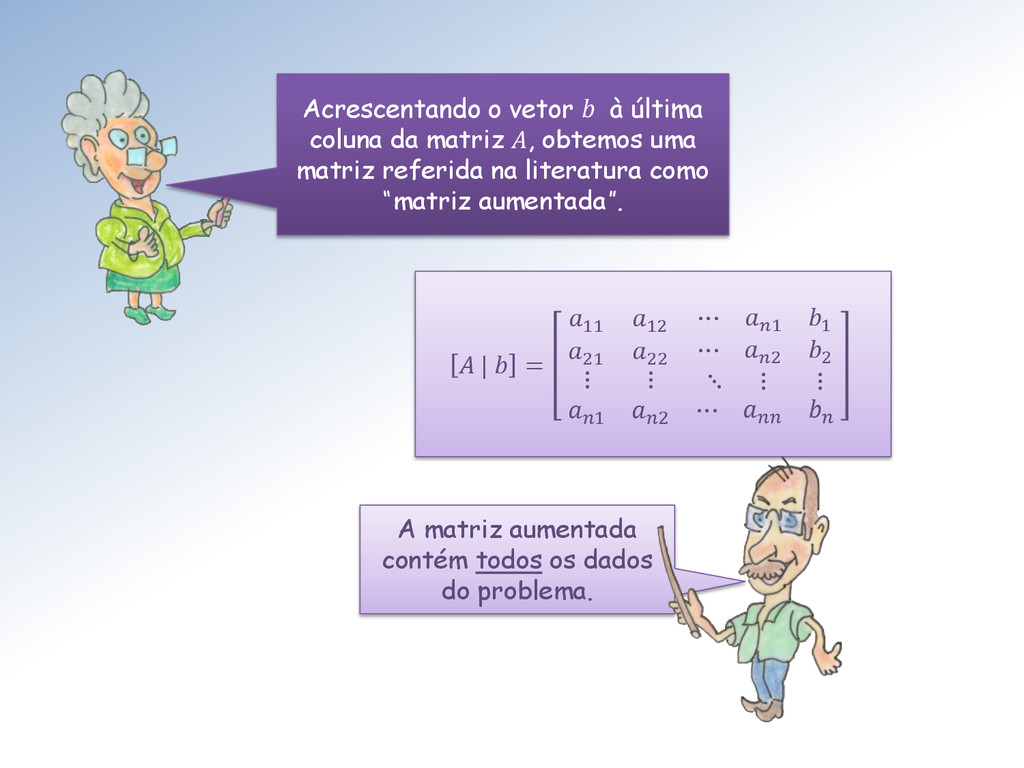
obtemos uma matriz referida na literatura como “matriz aumentada”. | = 11 12 ⋯ 1 1 21 22 ⋯ 2 2 ⋮ 1 ⋮ 2 ⋱ ⋮ ⋮ ⋯ A matriz aumentada contém todos os dados do problema.
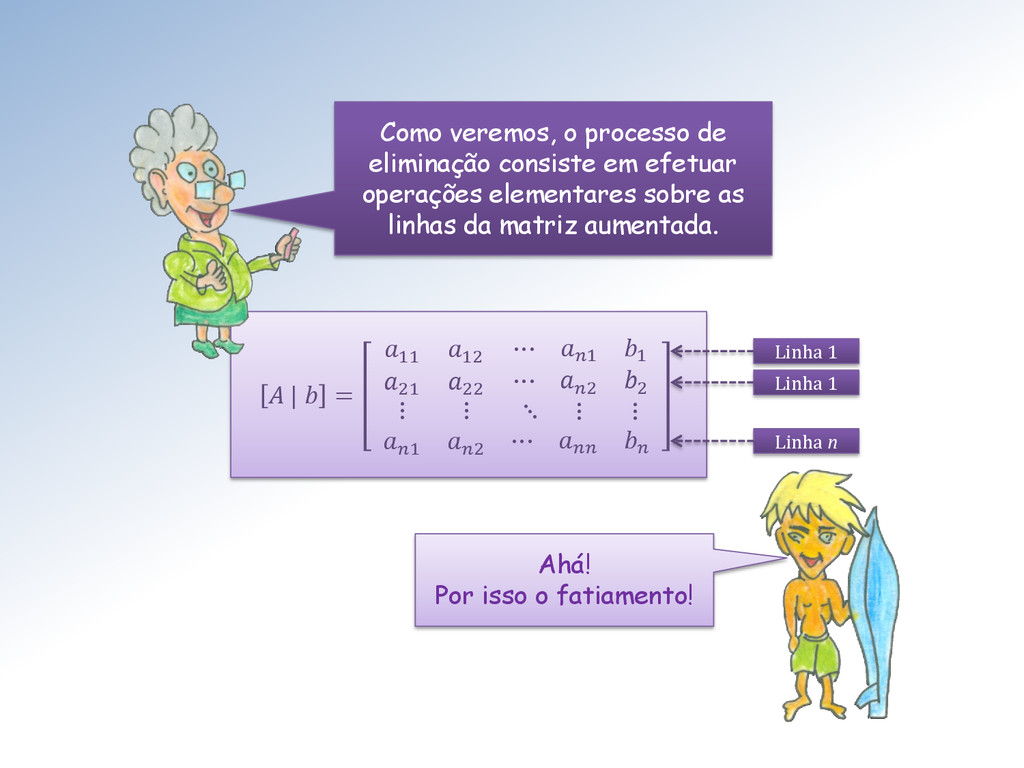
2 2 ⋮ 1 ⋮ 2 ⋱ ⋮ ⋮ ⋯ Como veremos, o processo de eliminação consiste em efetuar operações elementares sobre as linhas da matriz aumentada. Linha 1 Linha 1 Linha n Ahá! Por isso o fatiamento!
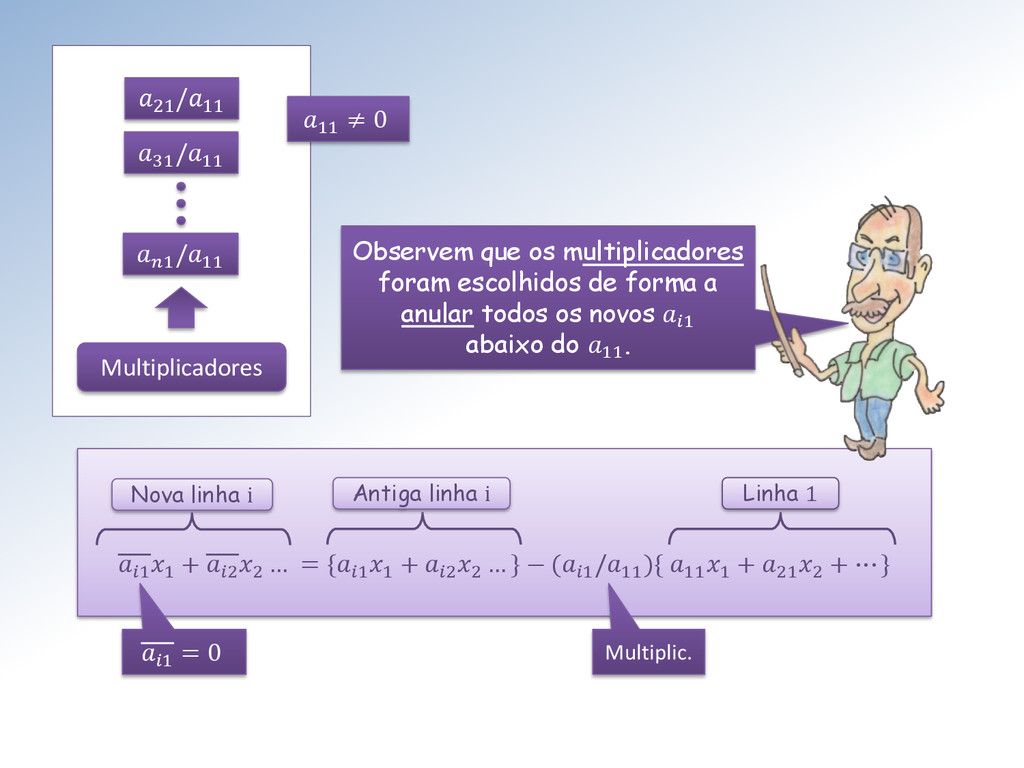
2 2 … } − (1 /11 ){ 11 1 + 21 2 + ⋯ } 1 = 0 Nova linha i Linha 1 Antiga linha i Multiplic. Observem que os multiplicadores foram escolhidos de forma a anular todos os novos 1 abaixo do 11 . 1 /11 31 /11 Multiplicadores 21 /11 11 ≠ 0
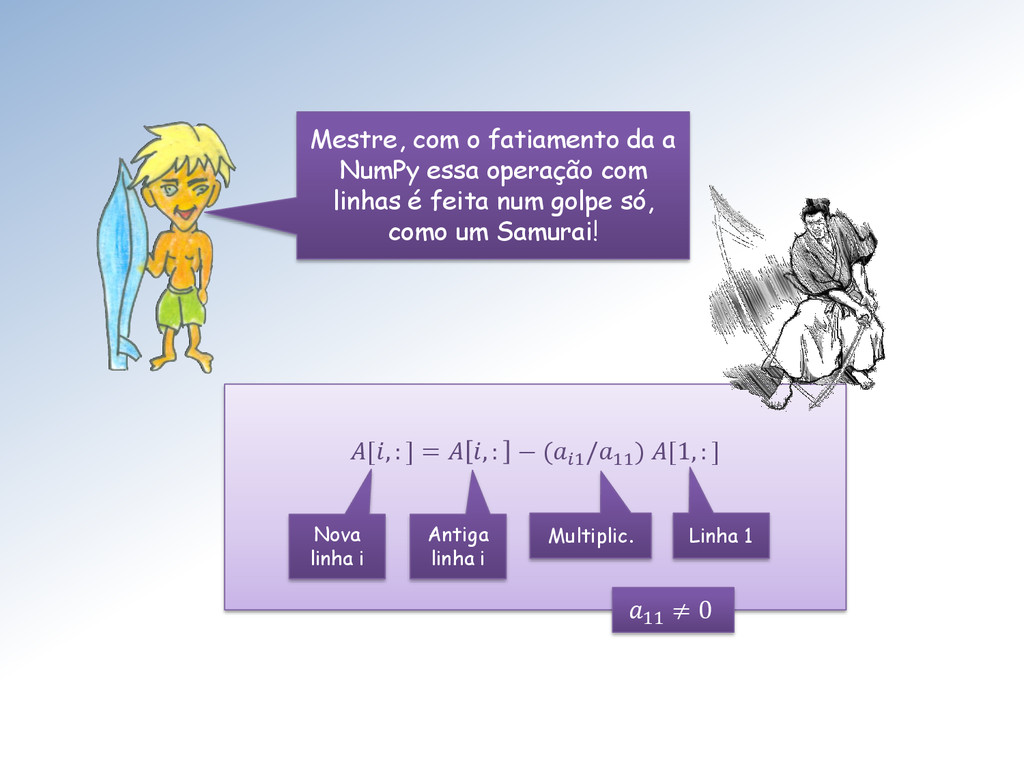
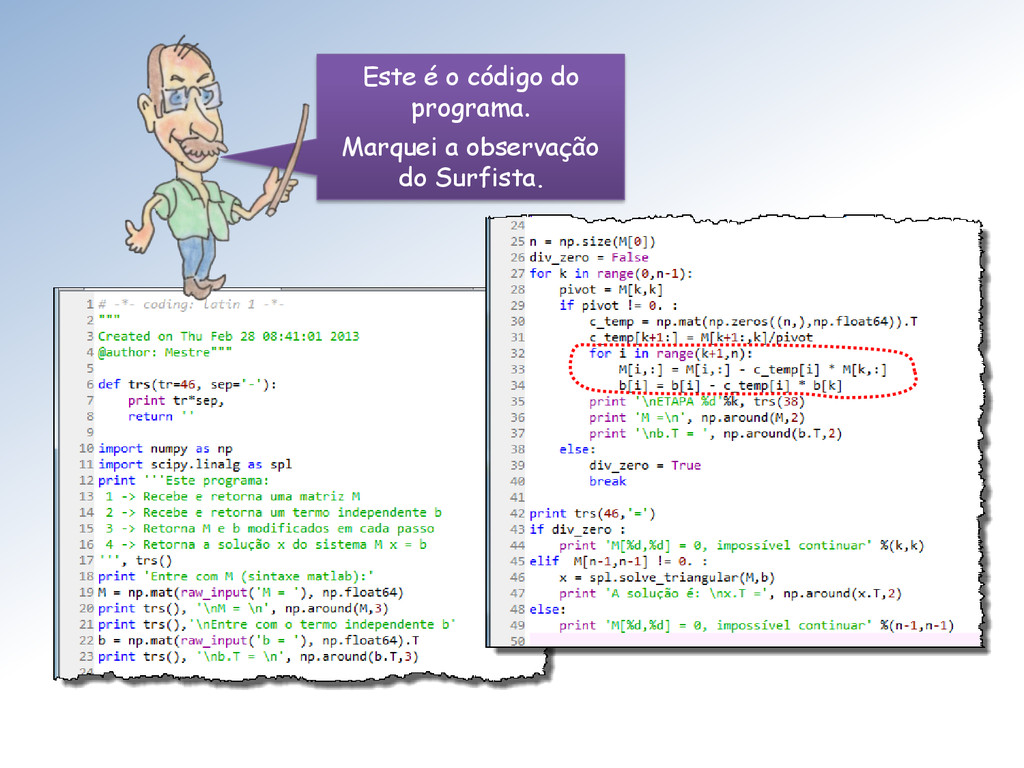
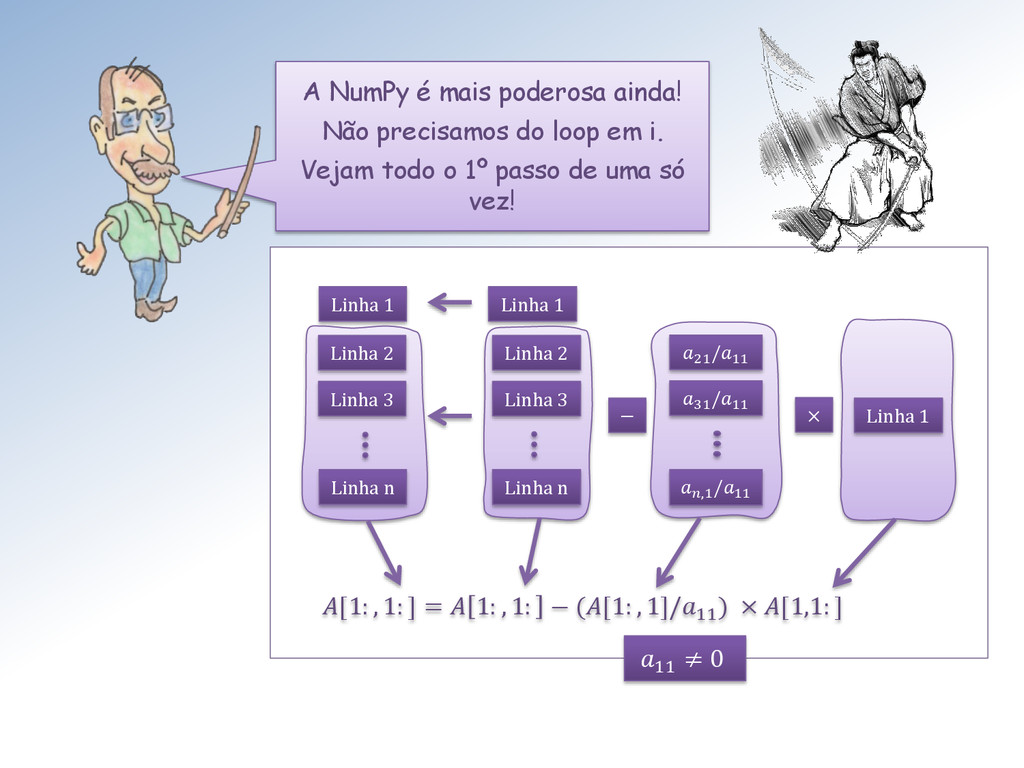
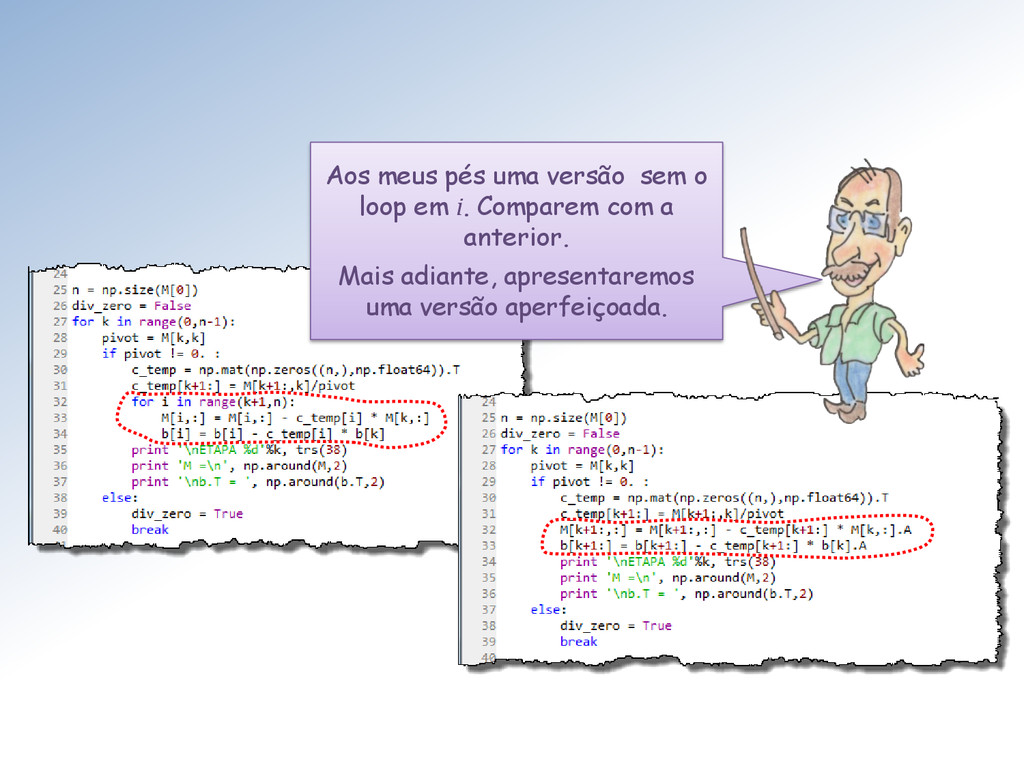
Não precisamos do loop em i. Vejam todo o 1º passo de uma só vez! [1: , 1: ] = 1: , 1: − ([1: , 1]/11 ) × [1,1: ] Linha 2 Linha 3 Linha n − × Linha 2 Linha 3 Linha n 21 /11 31 /11 ,1 /11 Linha 1 11 ≠ 0
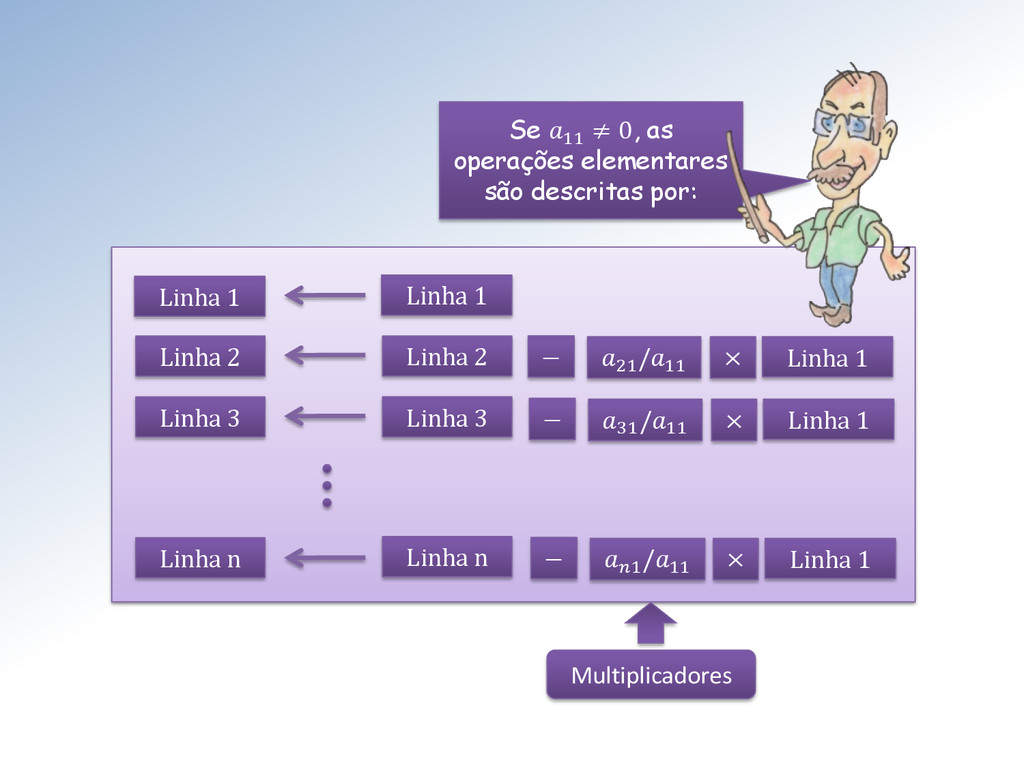
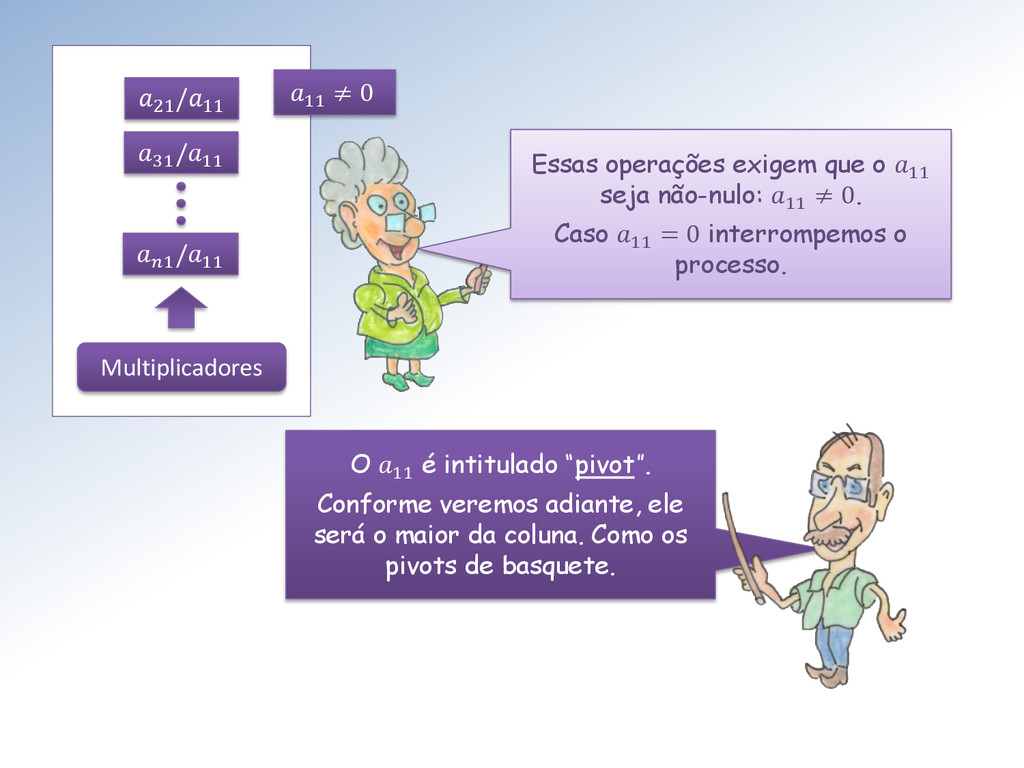
o maior da coluna. Como os pivots de basquete. Essas operações exigem que o 11 seja não-nulo: 11 ≠ 0. Caso 11 = 0 interrompemos o processo. 1 /11 31 /11 Multiplicadores 21 /11 11 ≠ 0
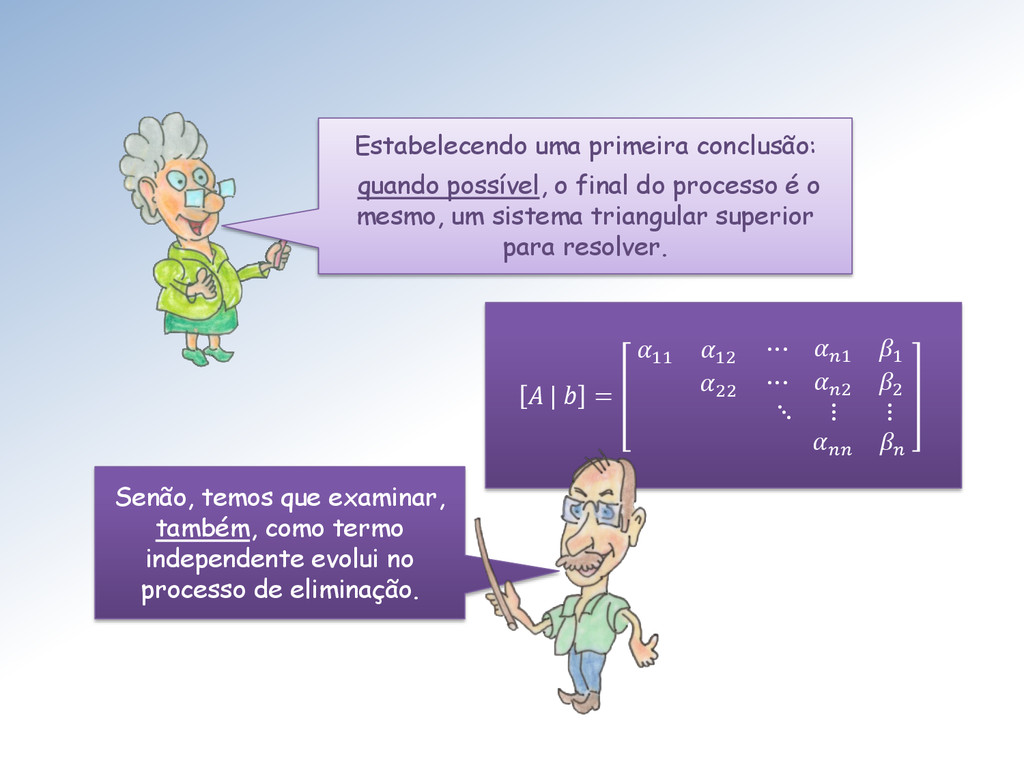
é o mesmo, um sistema triangular superior para resolver. | = 11 12 ⋯ 1 1 22 ⋯ 2 2 ⋱ ⋮ ⋮ Senão, temos que examinar, também, como termo independente evolui no processo de eliminação.
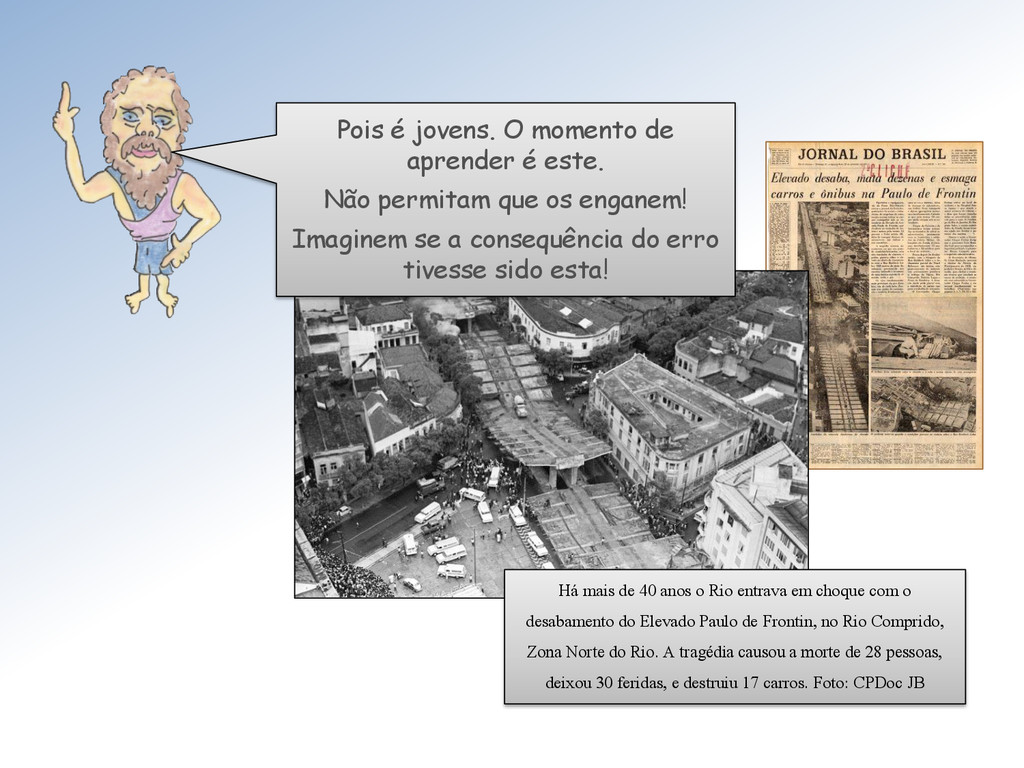
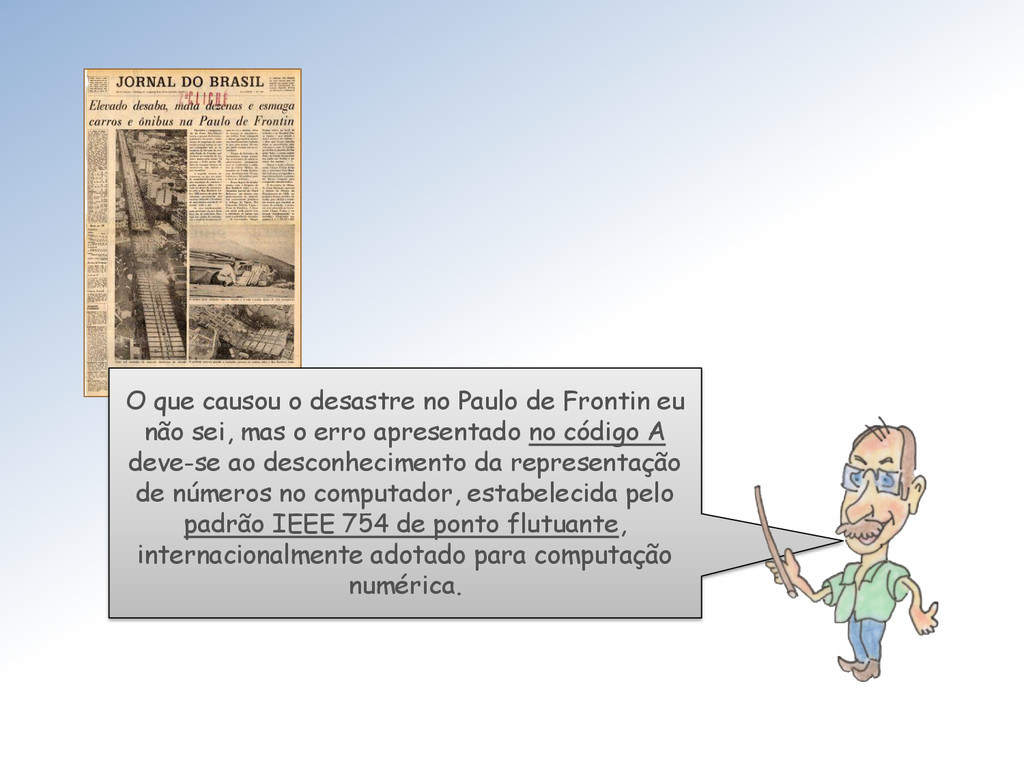
com o desabamento do Elevado Paulo de Frontin, no Rio Comprido, Zona Norte do Rio. A tragédia causou a morte de 28 pessoas, deixou 30 feridas, e destruiu 17 carros. Foto: CPDoc JB Pois é jovens. O momento de aprender é este. Não permitam que os enganem! Imaginem se a consequência do erro tivesse sido esta!
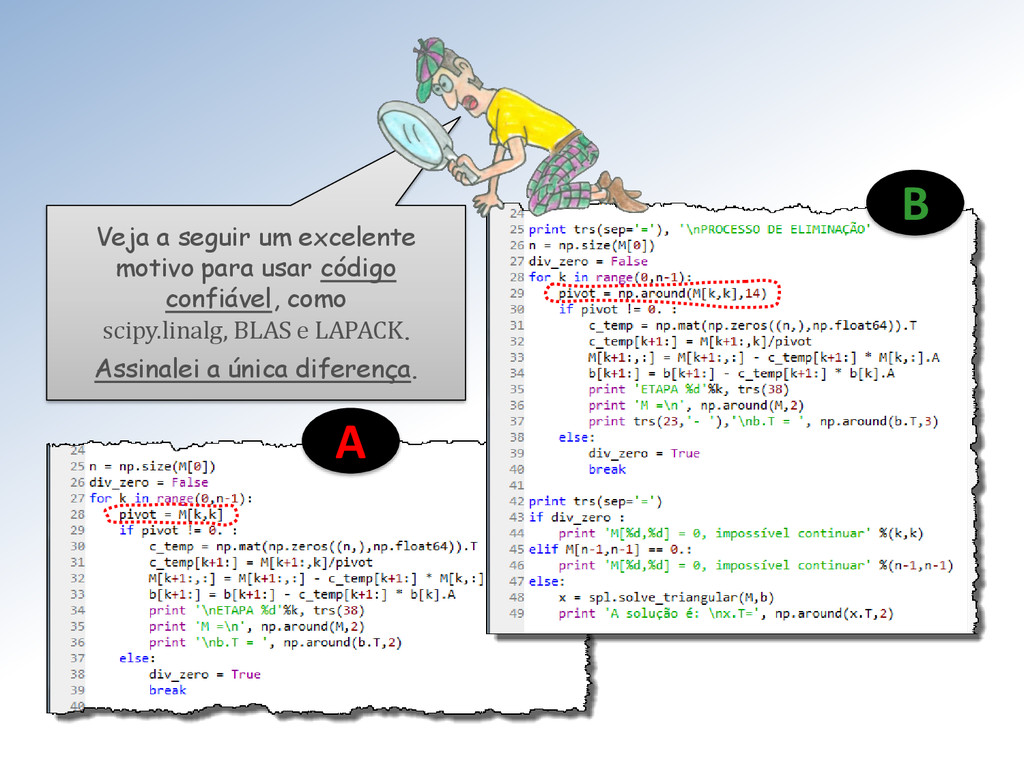
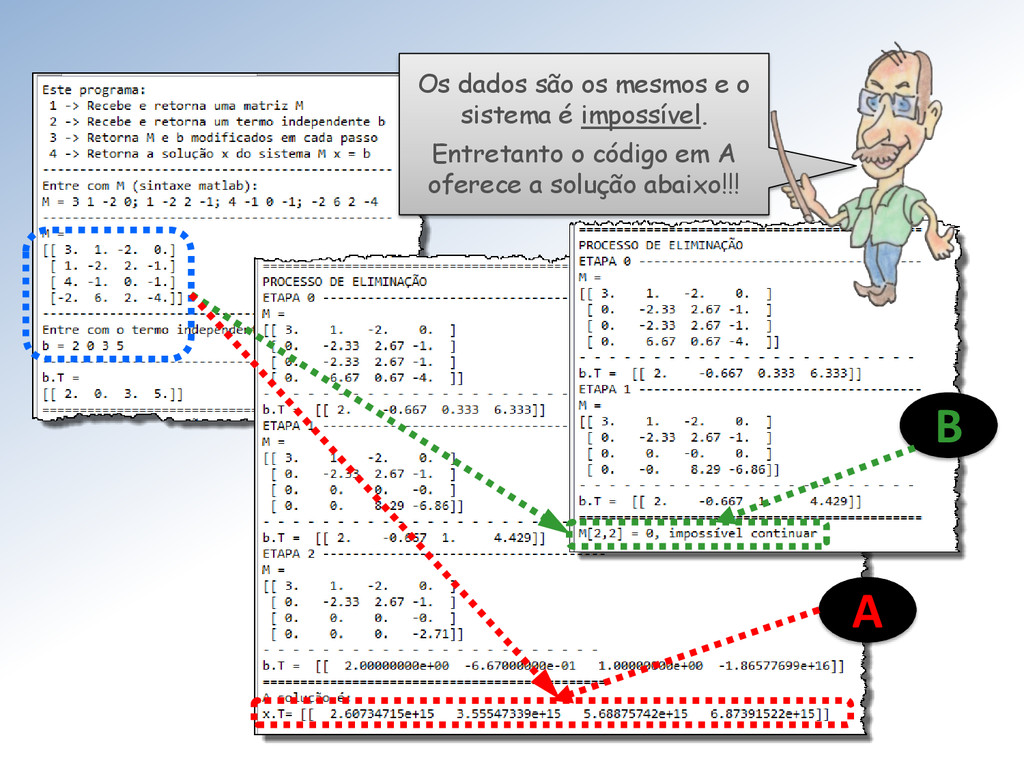
não sei, mas o erro apresentado no código A deve-se ao desconhecimento da representação de números no computador, estabelecida pelo padrão IEEE 754 de ponto flutuante, internacionalmente adotado para computação numérica.
754 de ponto flutuante, no padrão single, possui um erro na 24ª casa binária: 2−24. O Mestre acabou de reafirmar que a precisão de um single é de 23 bits.
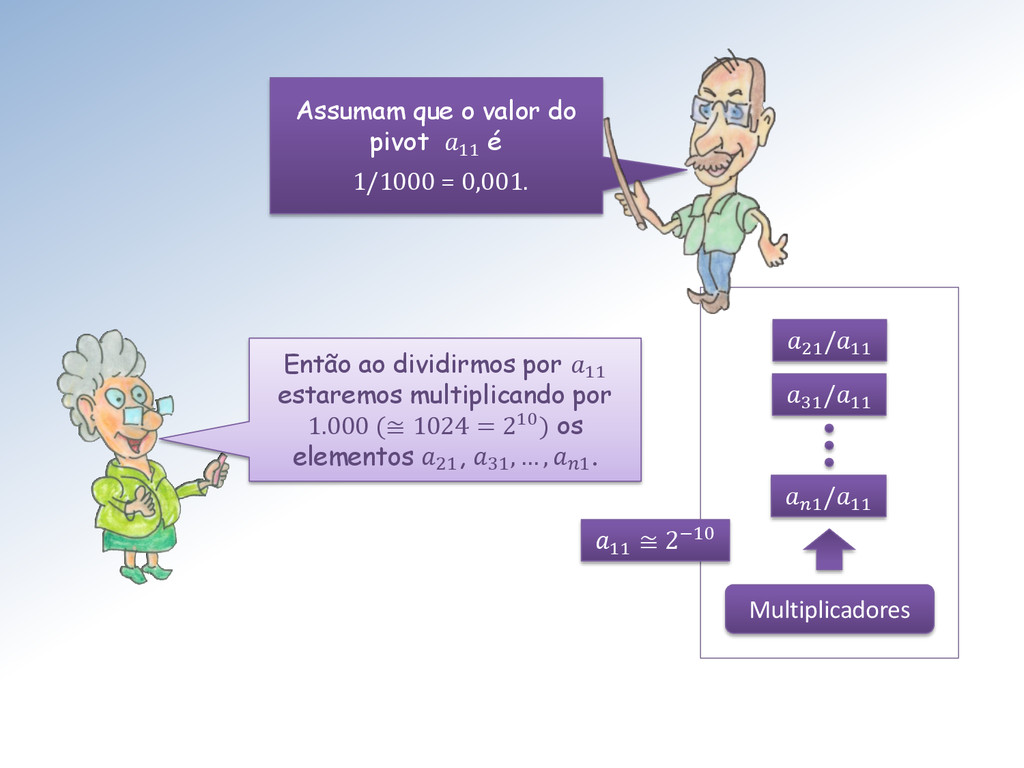
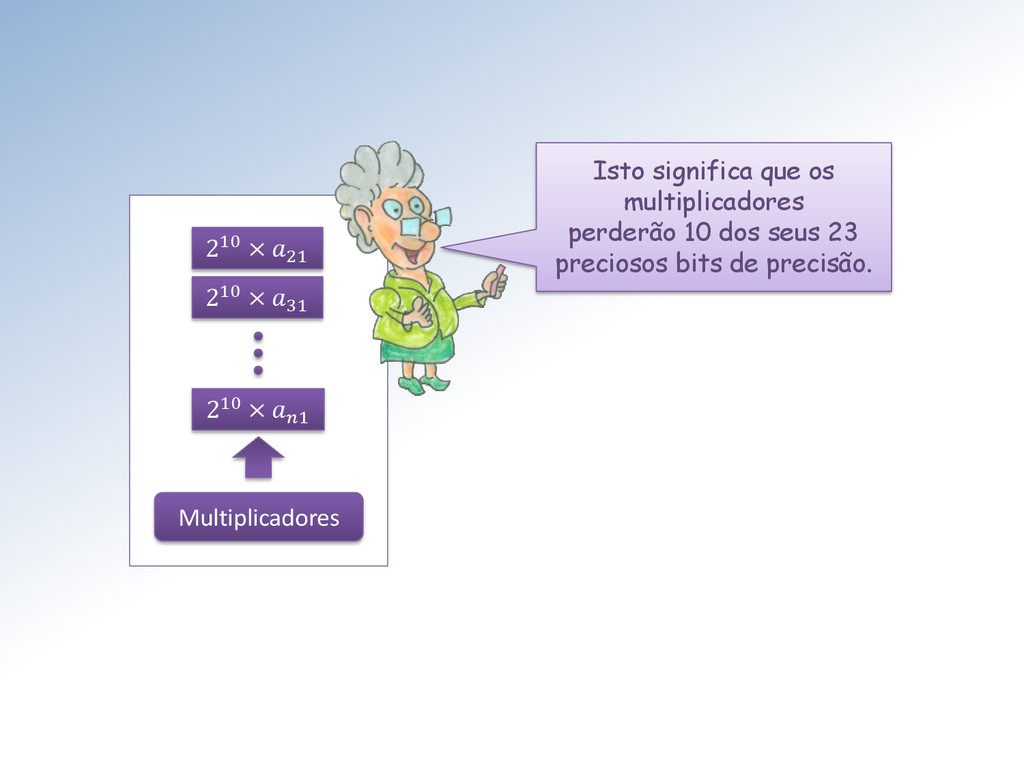
valor do pivot 11 é 1/1000 = 0,001. 11 ≅ 2−10 Então ao dividirmos por 11 estaremos multiplicando por 1.000 (≅ 1024 = 210) os elementos 21 , 31 , … , 1 .
que ser (jogadores) grandes! Sim minha Loirinha querida! Faça como eu, despreze pivots pequenos, eles estragam o jogo, no final. Sempre vá em busca dos maiores possíveis.
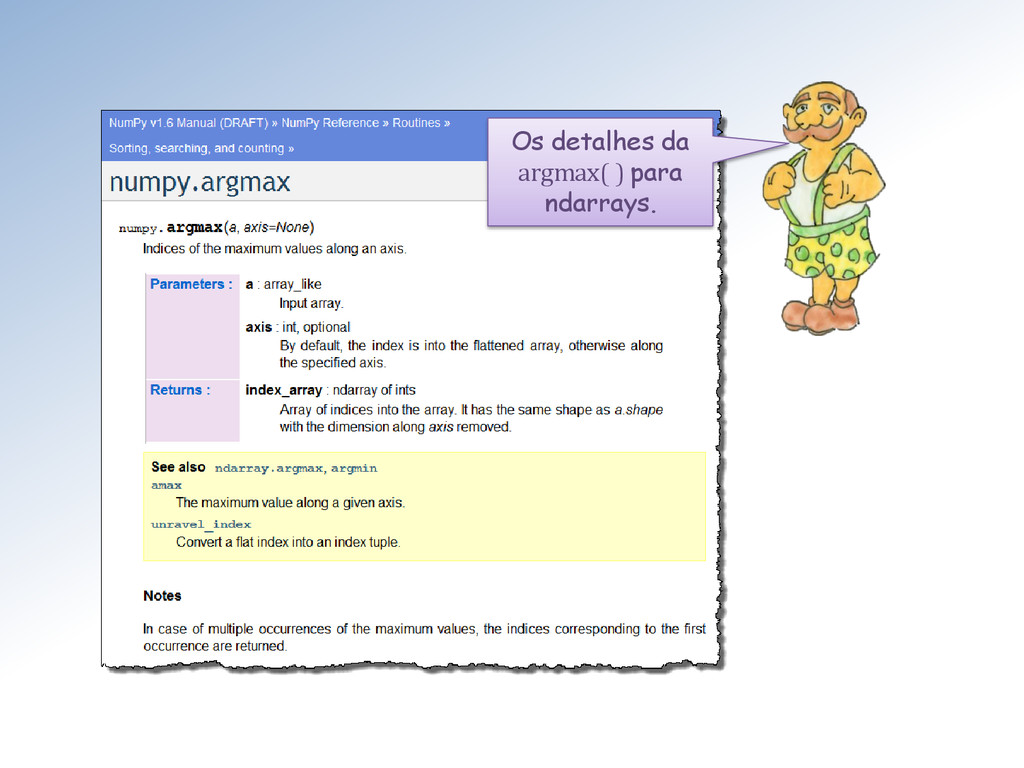
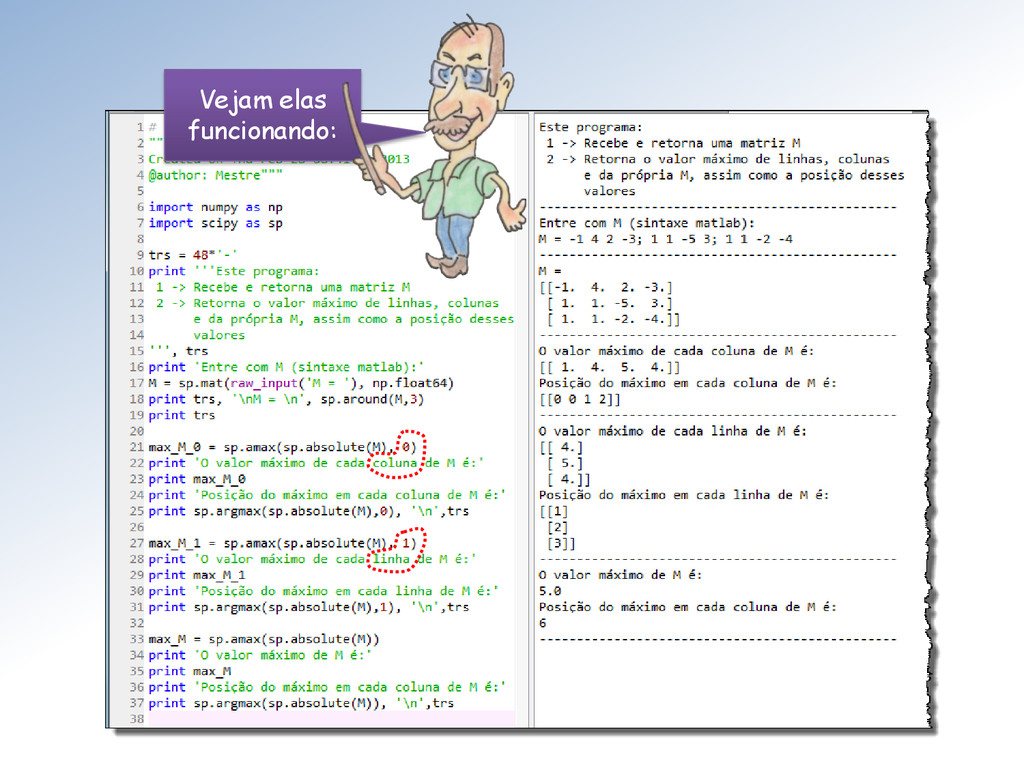
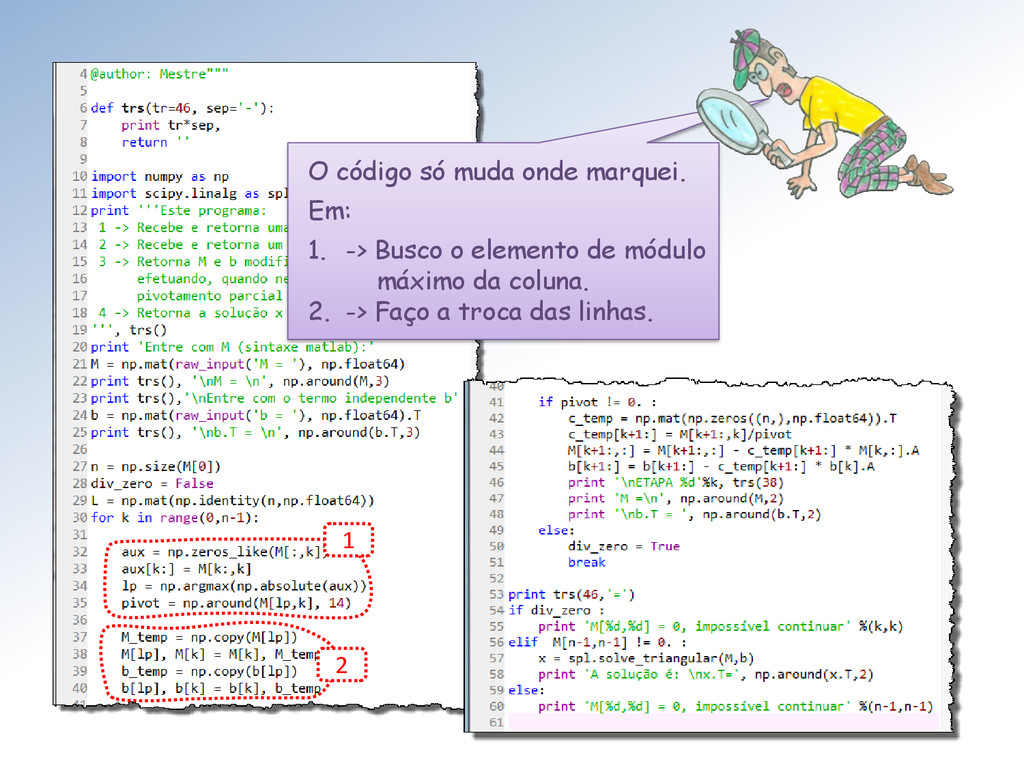
localizar o 1 de maior valor absoluto e trocar a linha i onde ele está com a linha 1. Esta é a estratégia conhecida na literatura como pivotamento parcial por coluna. Na realidade esta é, apenas, “a ponta do iceberg”. Analisaremos tudo isto em detalhes, mais adiante!
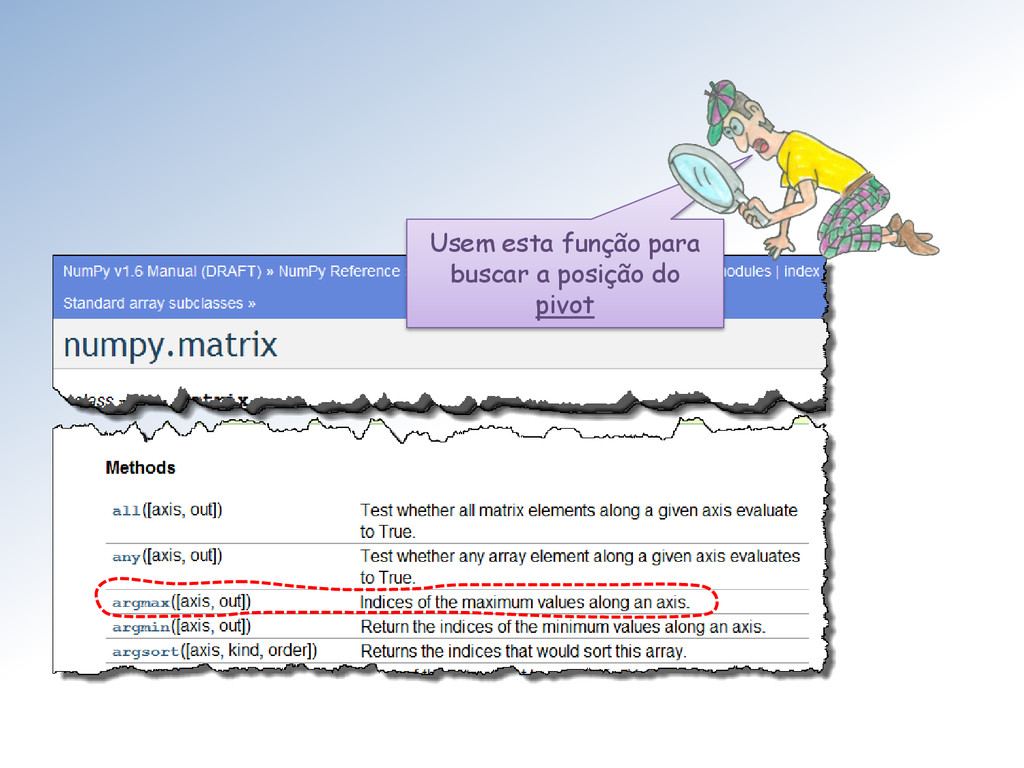
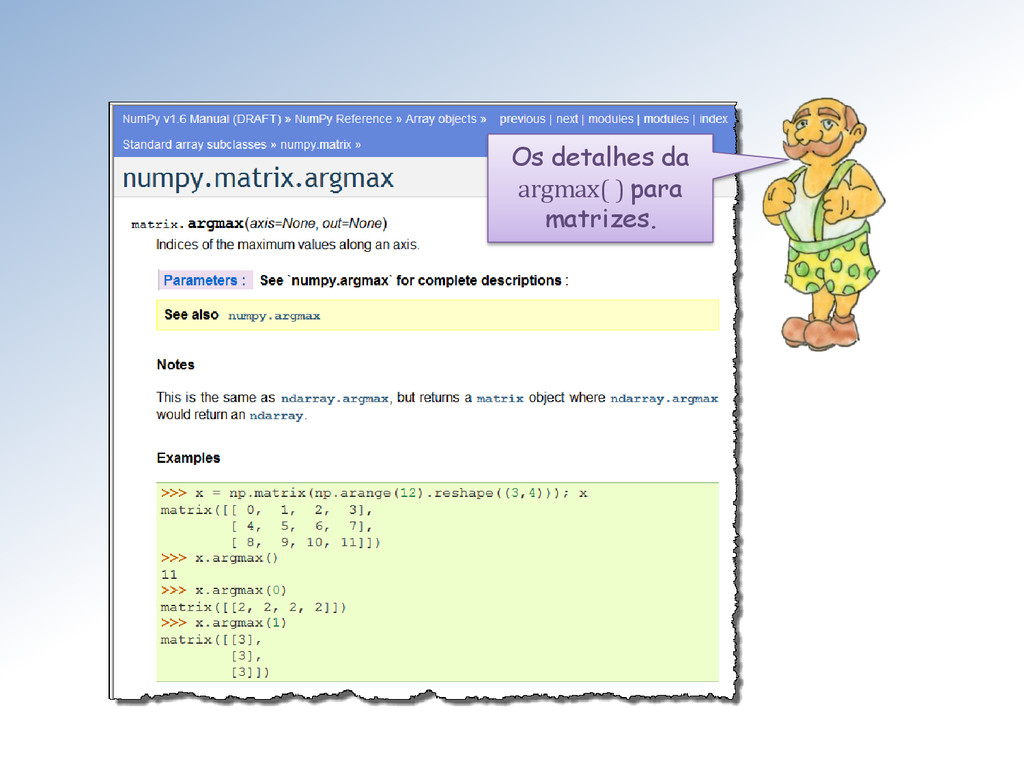
com pivotamento parcial por coluna. Precisamos localizar a posição do pivot na coluna, em seguida realizar a troca das linhas, para depois efetuar a eliminação.
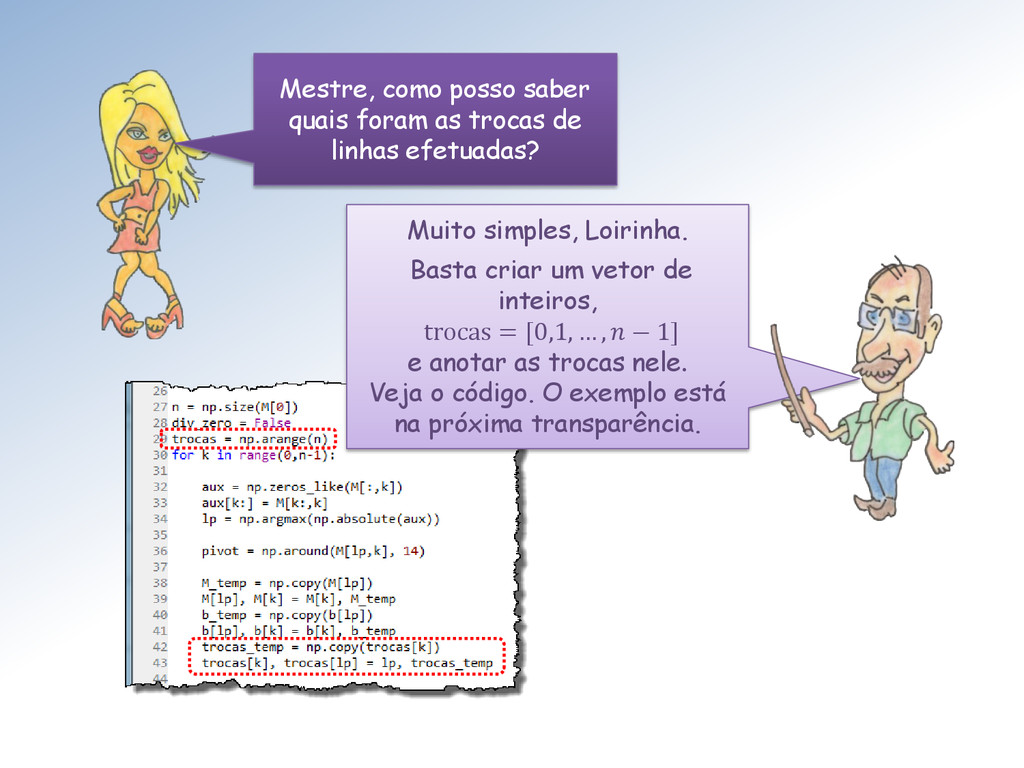
efetuadas? Muito simples, Loirinha. Basta criar um vetor de inteiros, trocas = [0,1, … , − 1] e anotar as trocas nele. Veja o código. O exemplo está na próxima transparência.
uma linha por um número real Trocar duas linhas de posição E elas permitiram transformar o sistema original A x = b num sistema triangular superior U x = β, com a mesma solução x.
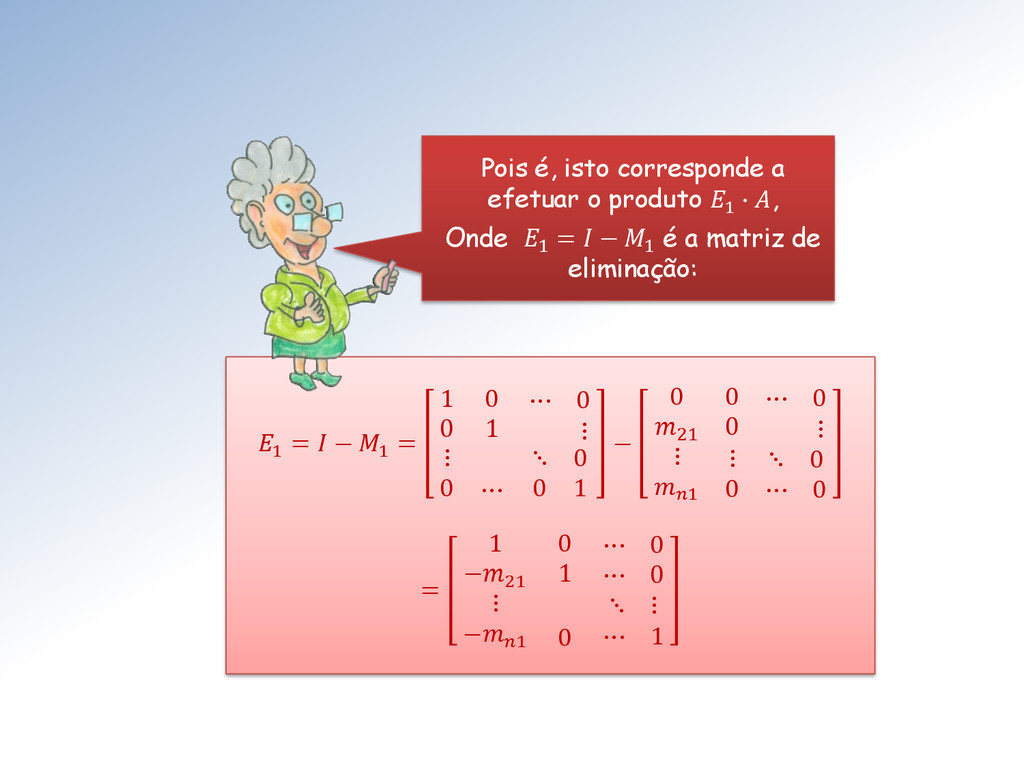
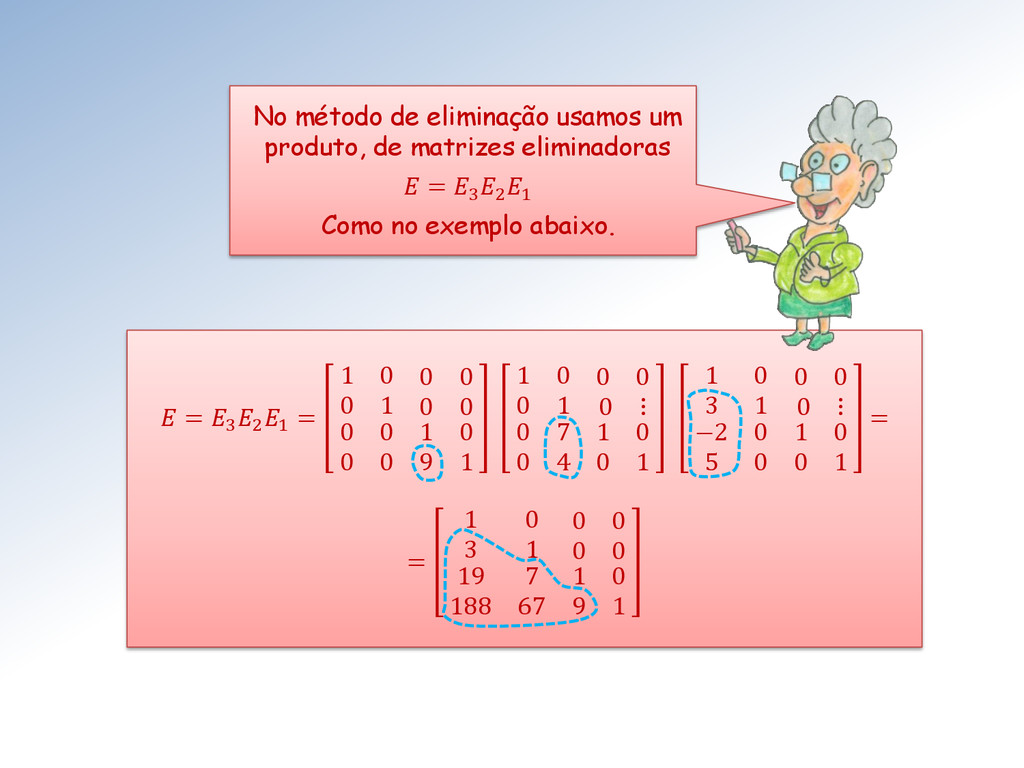
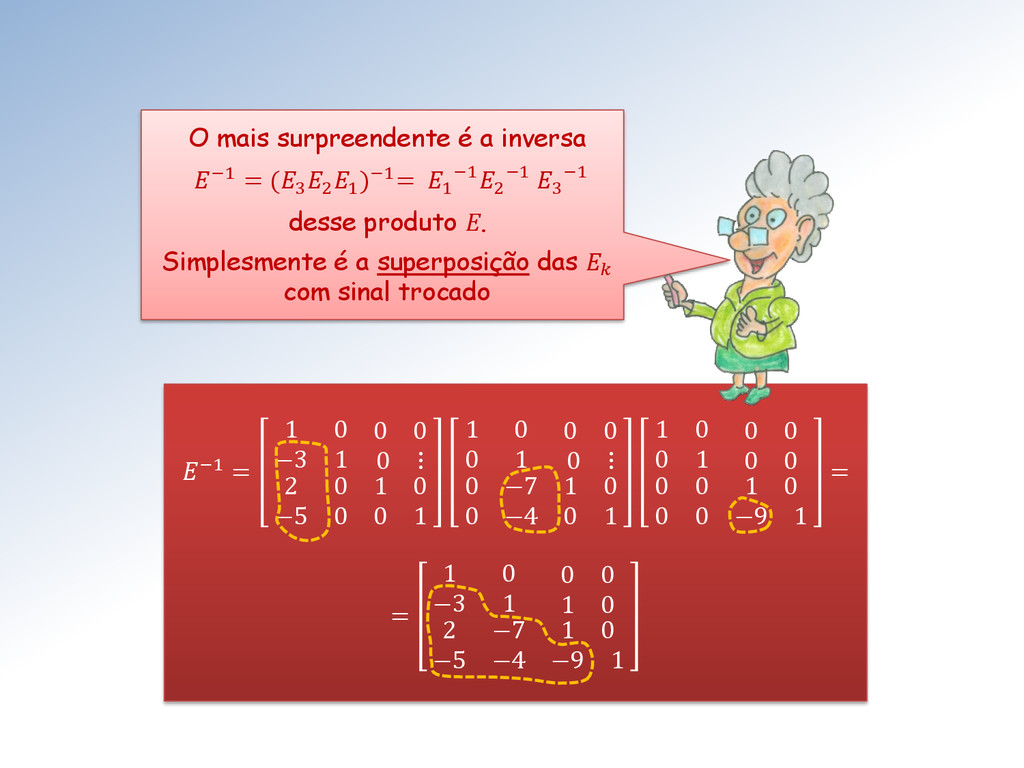
linhas) • L é uma matriz triangular inferior (L de lower) • U é a matriz triangular superior ao final da eliminação (U de upper) A fatoração PLU é o resultado final dessas multiplicações. Como o Mestre anunciou todas essas três operações elementares podem ser descritas através de multiplicações matriciais!
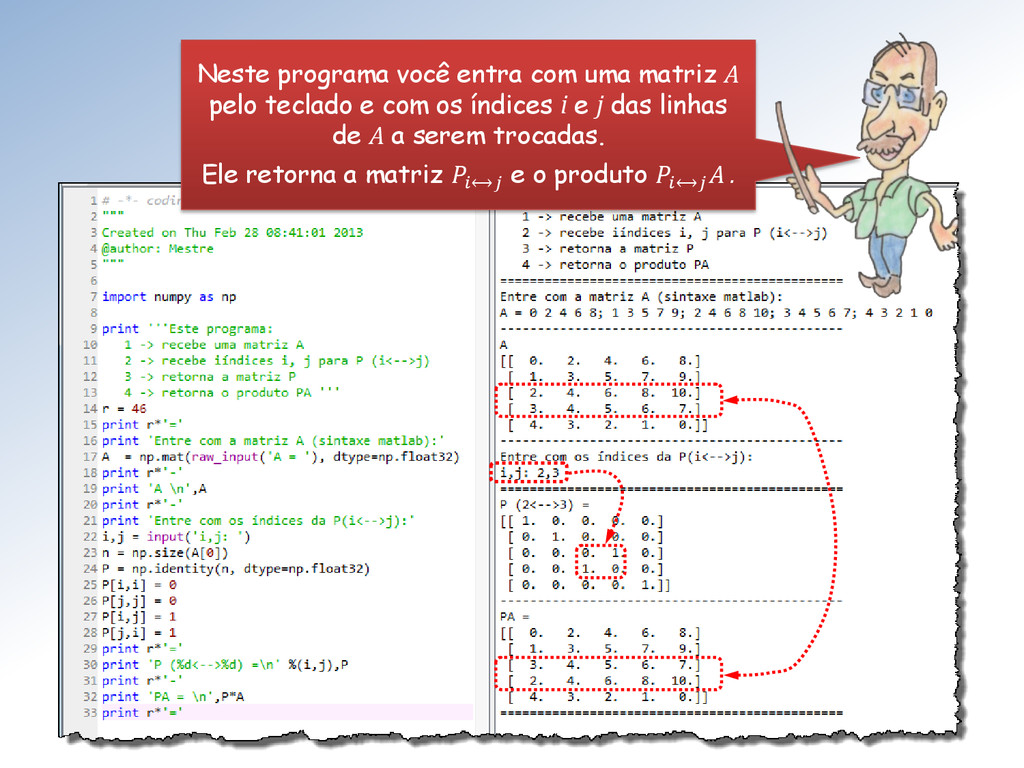
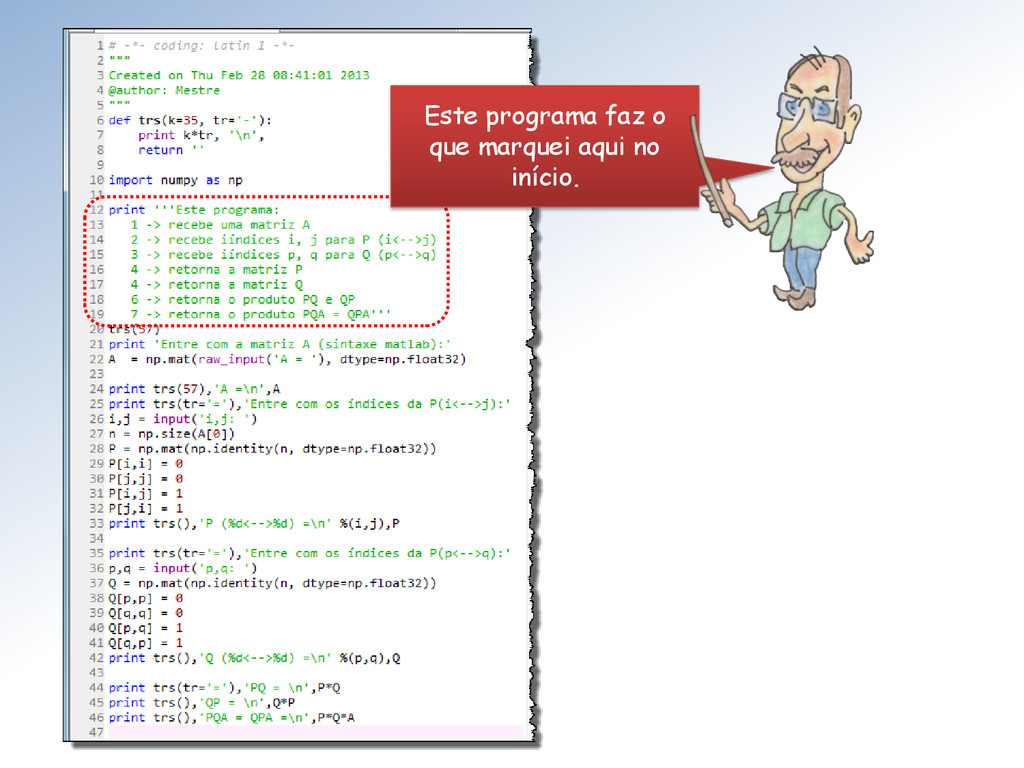
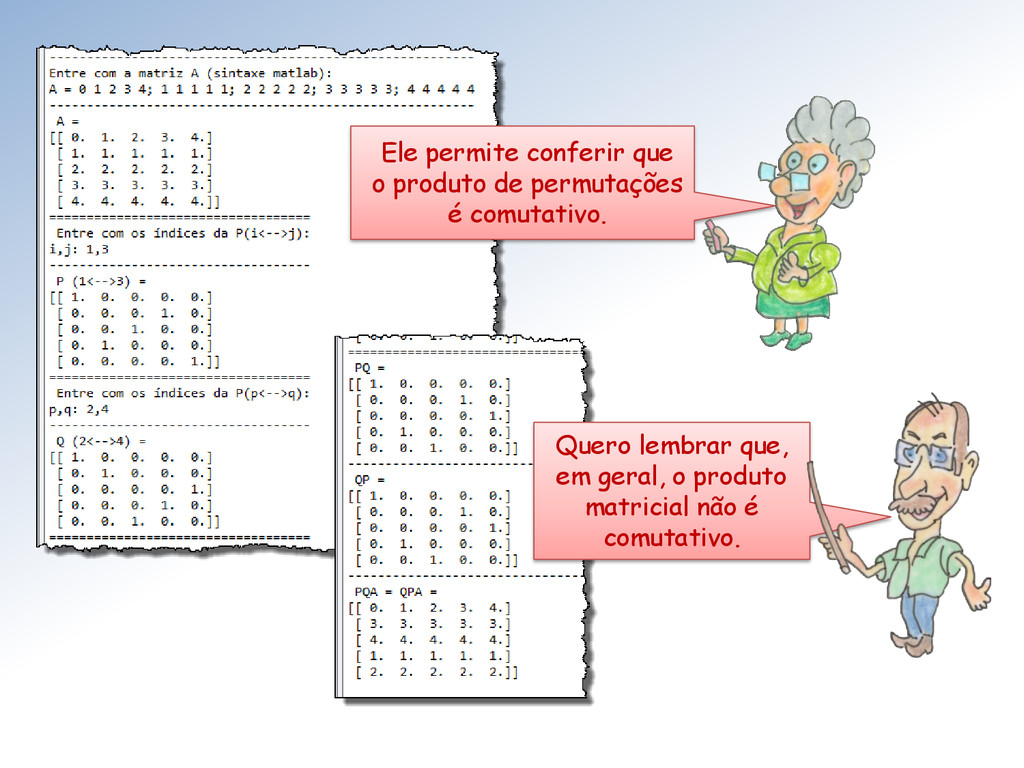
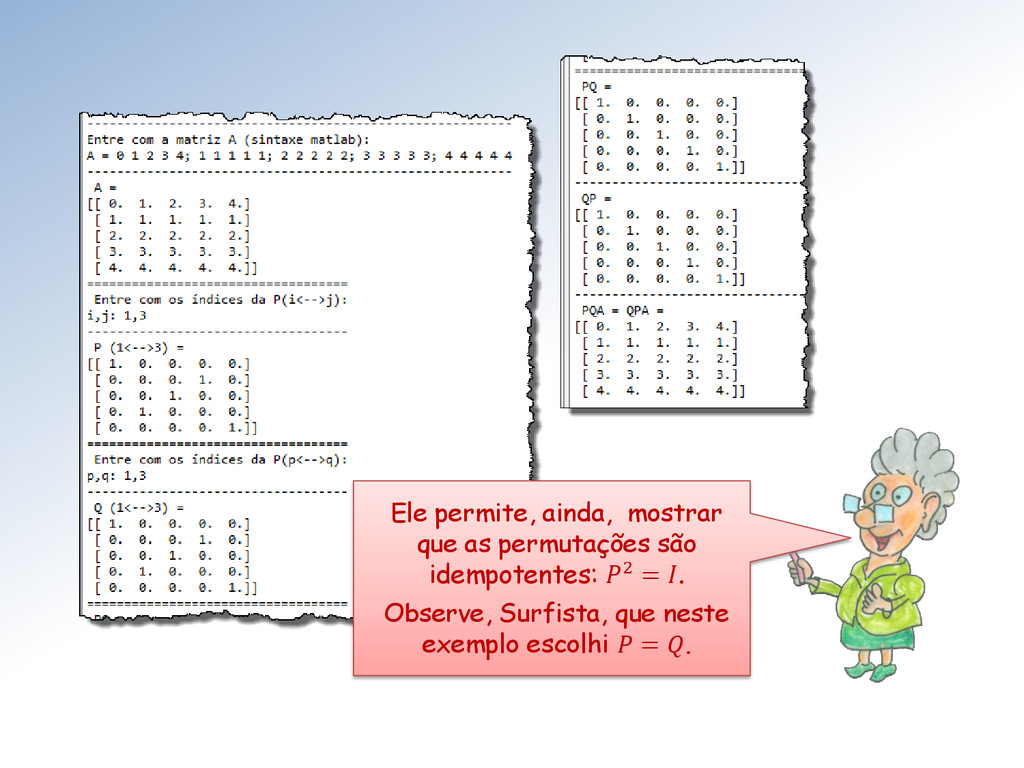
e j da identidade I Observem que ↔ é uma matriz simétrica, isto é ↔ = ⟷ . É fácil observar que o produto ↔ é a matriz A com suas linhas i e j trocadas. O programa a seguir mostrar isto.
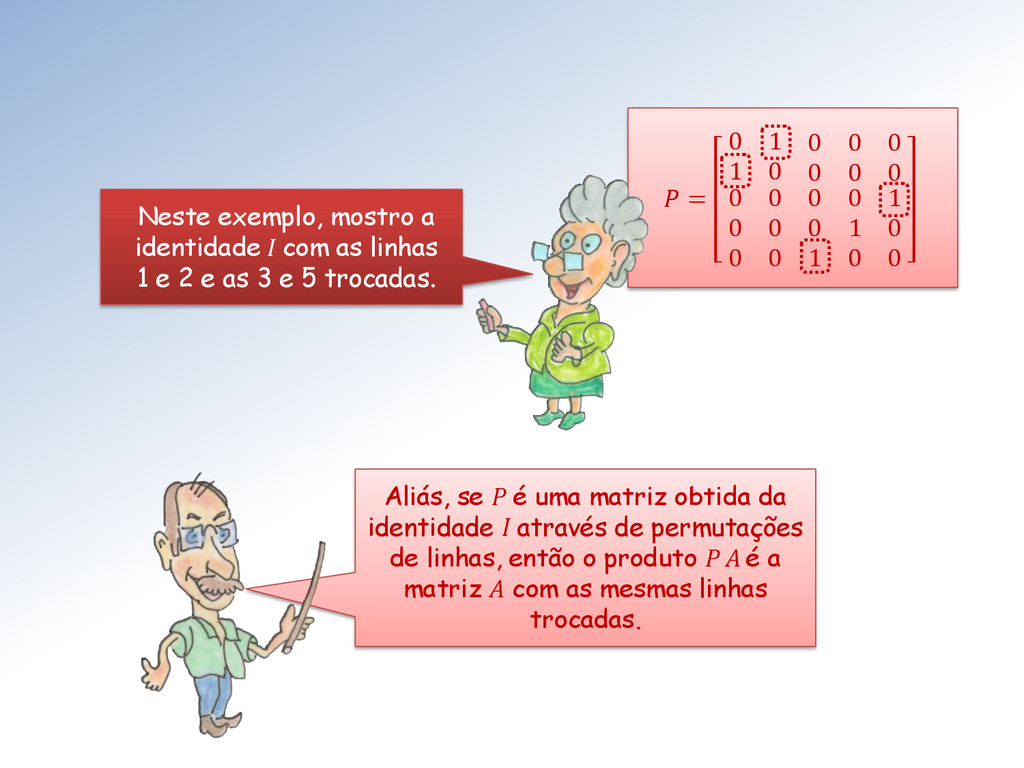
0 0 0 0 0 0 0 0 0 1 0 1 0 1 0 0 Neste exemplo, mostro a identidade I com as linhas 1 e 2 e as 3 e 5 trocadas. Aliás, se P é uma matriz obtida da identidade I através de permutações de linhas, então o produto P A é a matriz A com as mesmas linhas trocadas.
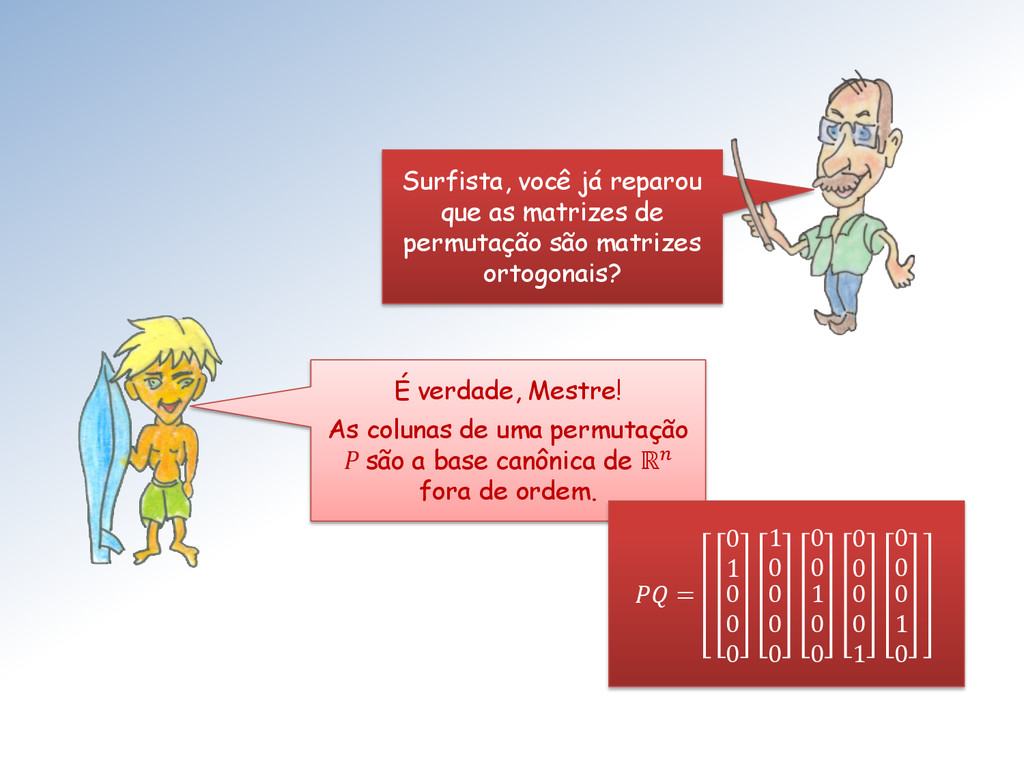
matrizes ortogonais? É verdade, Mestre! As colunas de uma permutação P são a base canônica de ℝ fora de ordem. = 0 1 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 1 0
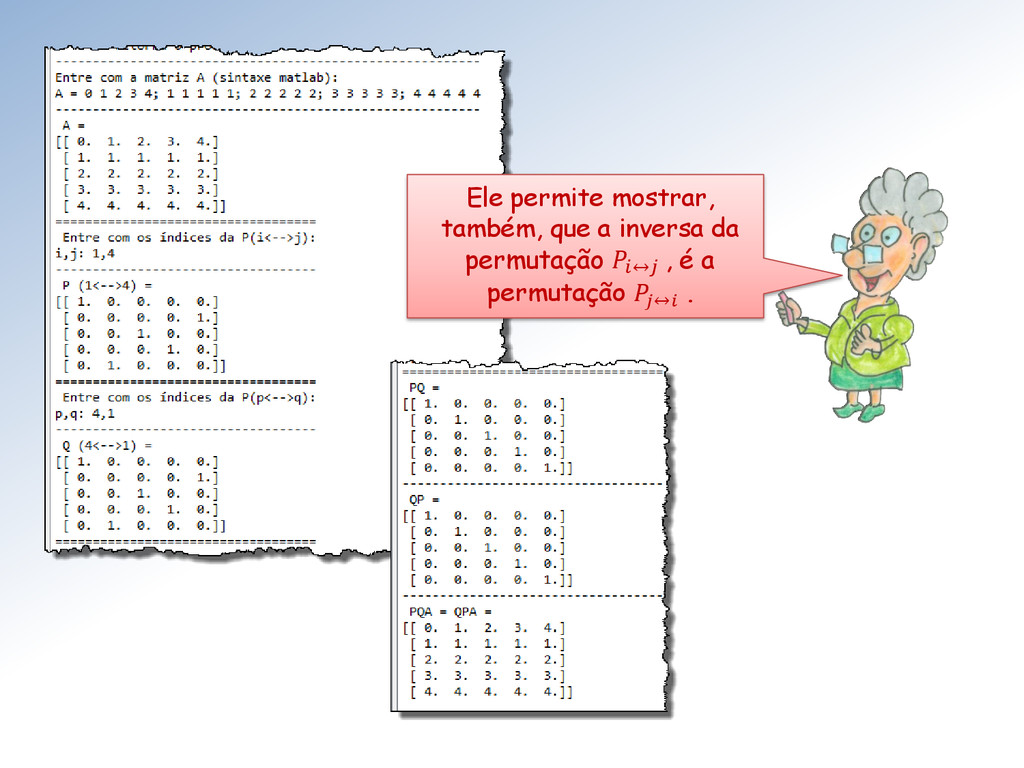
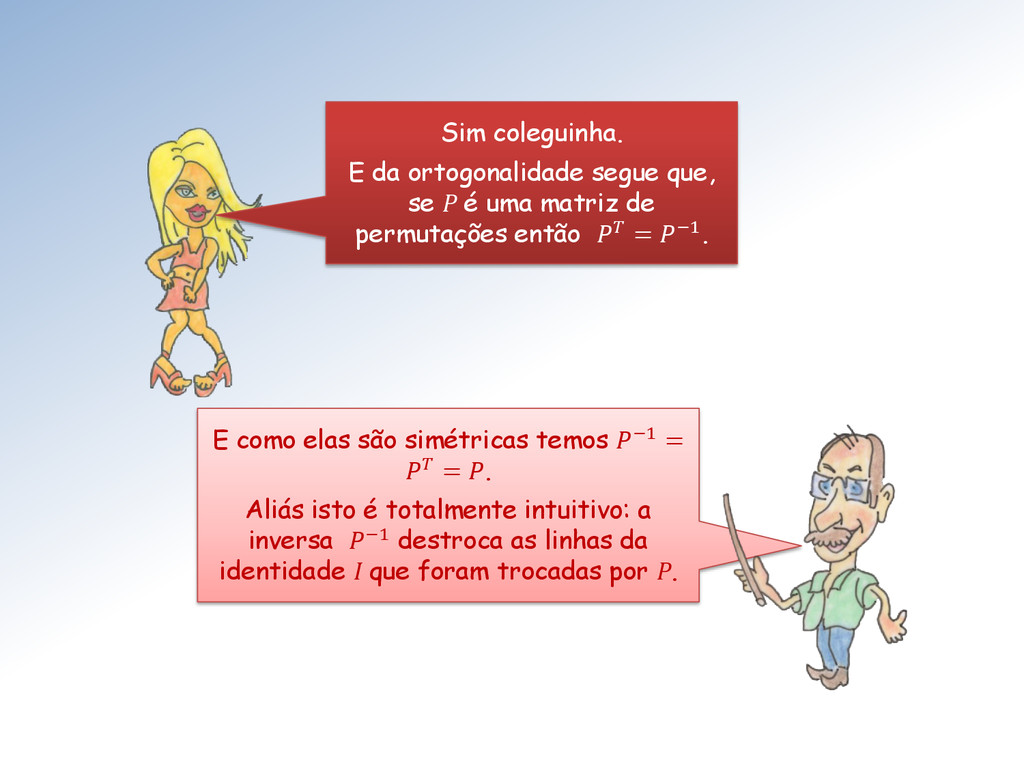
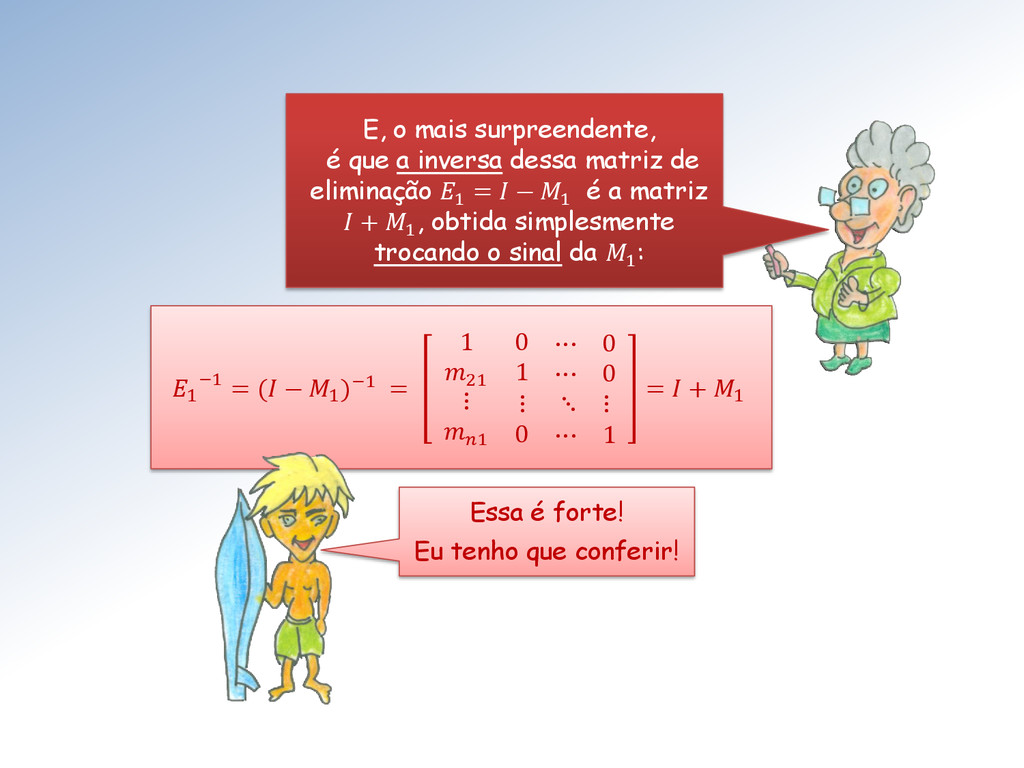
uma matriz de permutações então = −1. E como elas são simétricas temos −1 = = . Aliás isto é totalmente intuitivo: a inversa −1 destroca as linhas da identidade I que foram trocadas por P.
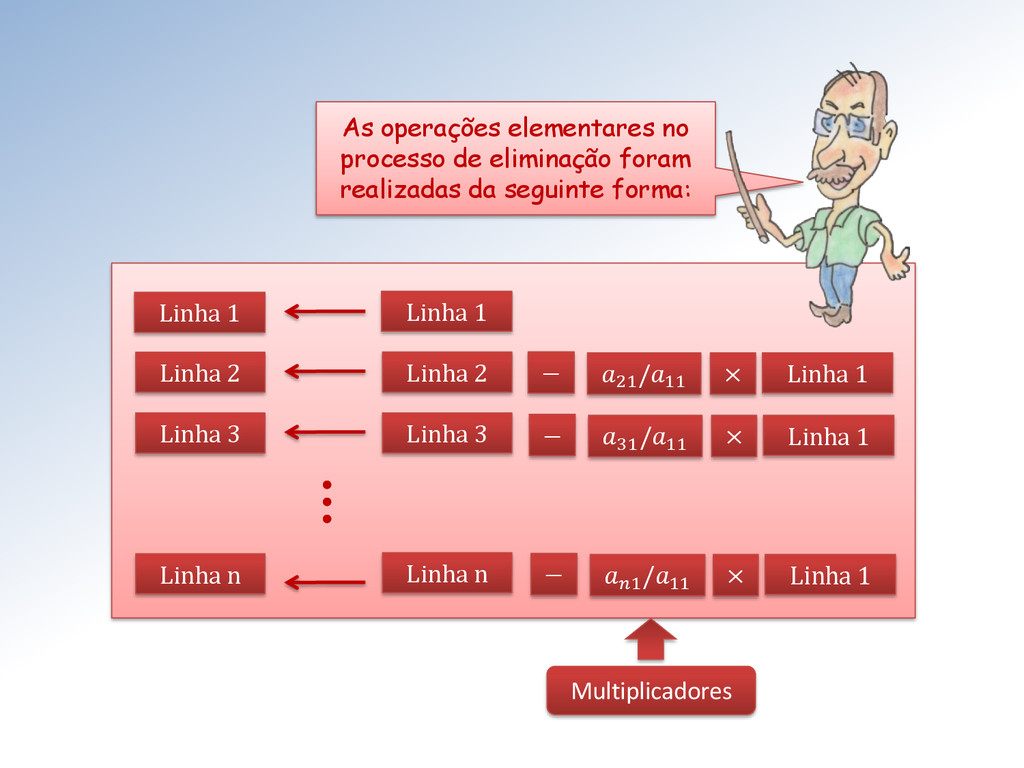
seguinte forma: Linha 1 Linha 1 Linha 2 Linha 2 Linha 1 21 /11 × − Linha 3 Linha 3 Linha 1 31 /11 × − Linha n Linha n Linha 1 1 /11 × − Multiplicadores
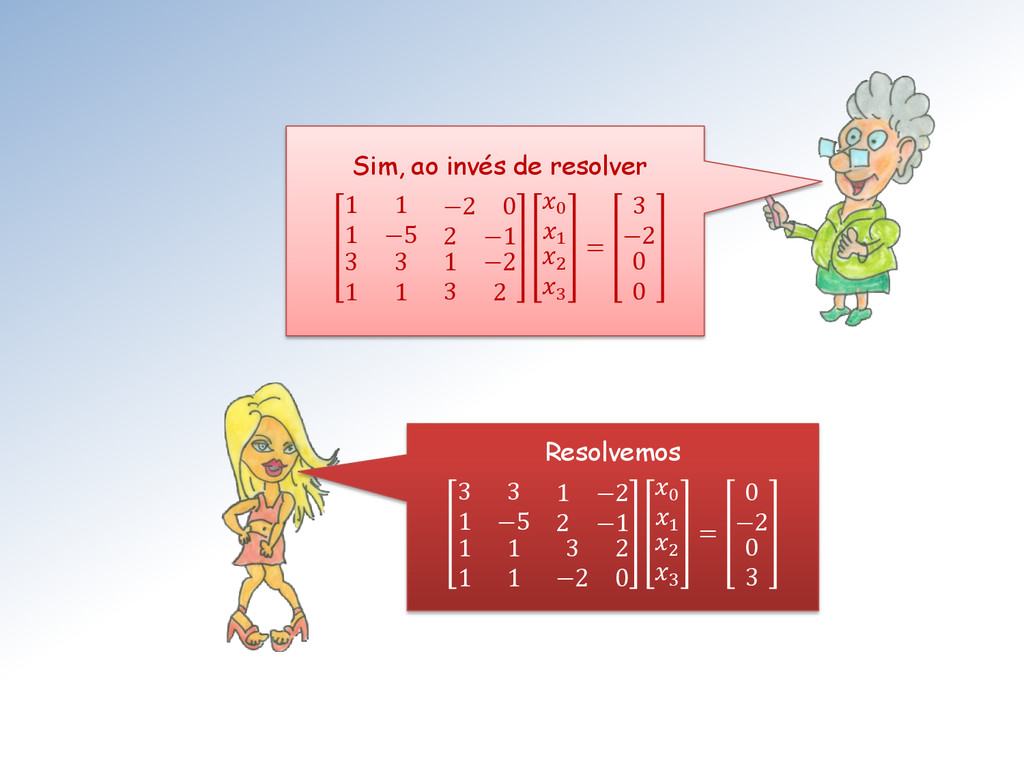
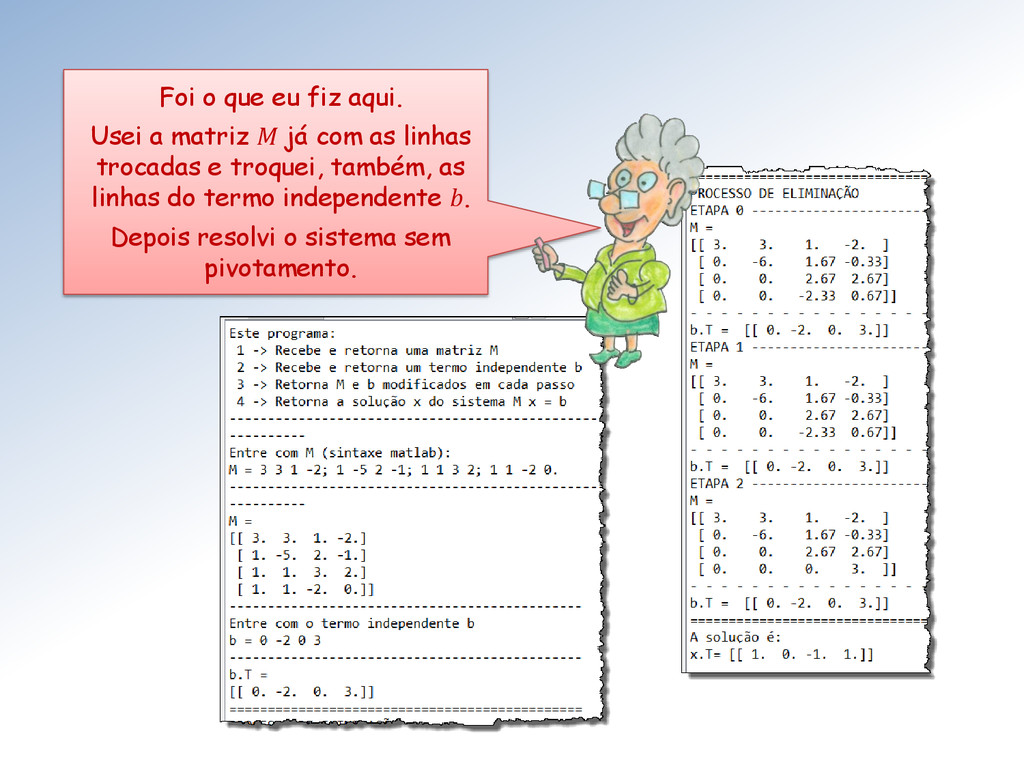
= é equivalente a resolver o sistema = , usando apenas a fatoração LU. Então Mestra, basta efetuar as trocas das linhas no termo independente b e usar a fatoração LU sem pivotamento na matriz A já com as trocas?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}