Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
iPhoneで自動運転してきた
Search
Satoshi Gachi Fujimoto
February 09, 2020
Technology
620
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
iPhoneで自動運転してきた
Kumamoto HoloLens ミートアップ vol.4の資料です。
https://hololens.connpass.com/event/162325/
Satoshi Gachi Fujimoto
February 09, 2020
More Decks by Satoshi Gachi Fujimoto
See All by Satoshi Gachi Fujimoto
忘年会LT(2025)
satoshirobatofujimoto
0
65
バスあと何分ミニサイネージ
satoshirobatofujimoto
0
150
高専で制御を、大学でセンシングを学び、次は脳みそ
satoshirobatofujimoto
0
340
画像生成AIを使って勝負しよう
satoshirobatofujimoto
1
180
ガチマナ会 vol.1
satoshirobatofujimoto
0
280
画像生成AIを使って勝負しよう
satoshirobatofujimoto
0
340
画像からプロンプトを考えて最も似ている画像を生成した人が勝ちのゲーム@AIミーティング
satoshirobatofujimoto
0
230
VPS研究者が語る”VPS概論”
satoshirobatofujimoto
0
490
画像からプロンプトを考えて最も似ている画像を生成した人が勝ちのゲーム
satoshirobatofujimoto
0
260
Other Decks in Technology
See All in Technology
AIがコードを書く時代、人間は何を保証するのか———馬場さんと考える、開発者に求められる新しい責任と価値 - TECH PLAY
netmarkjp
0
330
AI エージェント時代のデジタルアイデンティティ
fujie
1
1.2k
BigQuery を検索ソースとした AI Agent の作り方って 〇〇 通りあんねん
satohjohn
0
140
AI研修(Day2)【MIXI 26新卒技術研修】
mixi_engineers
PRO
2
1.5k
MCPをつなげて作る組織横断のAIエージェント基盤
tsubakimoto_s
0
390
書籍セキュアAPIについて
riiimparm
0
390
CTOキーノート:AI時代の「つなぐ」を再定義 ― 真のIoTとリアルワールドAI【SORACOM Discovery 2026】
soracom
PRO
0
320
AI時代におけるエンジニアの新たな役割──FDEとクオリアの探求/登壇資料(戸井田 裕貴)
hacobu
PRO
0
660
ここは地獄!つらい朝会を体験することで、チームとしてのより良い振る舞いに気づくワークショップ / The stand-up meeting from hell in the game industry
scrummasudar
0
440
データ組織の転換期 一足飛びしない段階的戦略
leveragestech
PRO
0
110
文字起こし基盤の信頼性
abnoumaru
0
150
WEBフロントエンド研修【MIXI 26新卒技術研修】
mixi_engineers
PRO
1
740
Featured
See All Featured
Tell your own story through comics
letsgokoyo
1
1k
Easily Structure & Communicate Ideas using Wireframe
afnizarnur
194
17k
svc-hook: hooking system calls on ARM64 by binary rewriting
retrage
2
400
Efficient Content Optimization with Google Search Console & Apps Script
katarinadahlin
PRO
1
750
The SEO Collaboration Effect
kristinabergwall1
1
510
AI Search: Implications for SEO and How to Move Forward - #ShenzhenSEOConference
aleyda
1
1.3k
"I'm Feeling Lucky" - Building Great Search Experiences for Today's Users (#IAC19)
danielanewman
230
23k
Abbi's Birthday
coloredviolet
3
8.9k
Leading Effective Engineering Teams in the AI Era
addyosmani
9
2.2k
Faster Mobile Websites
deanohume
310
32k
Effective software design: The role of men in debugging patriarchy in IT @ Voxxed Days AMS
baasie
0
460
Un-Boring Meetings
codingconduct
0
350
Transcript
2020/02/09 Kumamoto HoloLens Meetup Vol.4 iPhoneで⾃動運転してきた
⾃⼰紹介 ガチ本 です co-founder KumaMCN ナレッジコミュニケーション R&D戦略チーム AWS ML コンピテンシーパートナー
Microsoft Mixed Reality Partner CV / SLAM / WHILL / Python satoshi.gachi.fujimoto @sotongshi
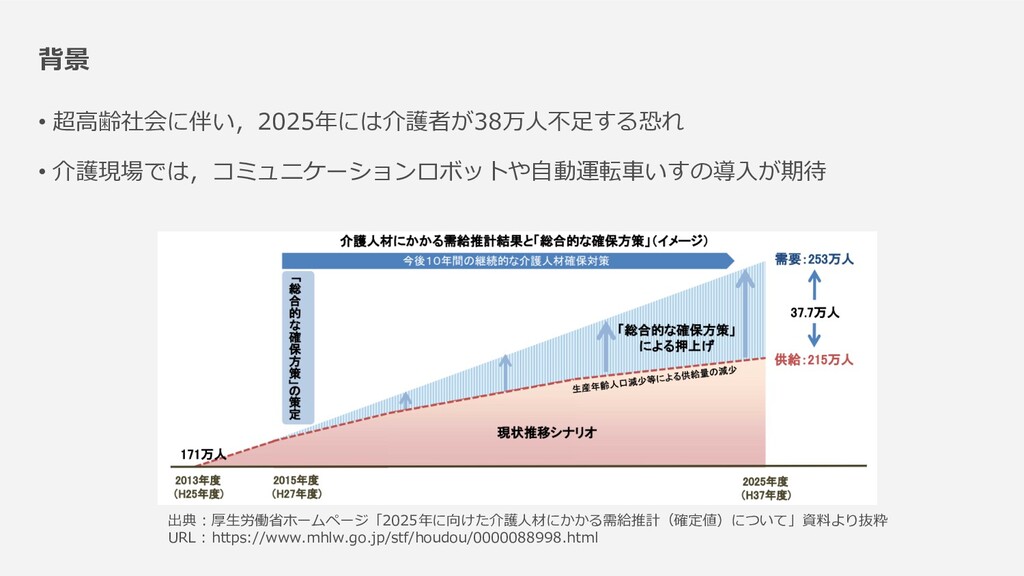
背景 • 超⾼齢社会に伴い,2025年には介護者が38万⼈不⾜する恐れ • 介護現場では,コミュニケーションロボットや⾃動運転⾞いすの導⼊が期待 出典 : 厚⽣労働省ホームページ「2025年に向けた介護⼈材にかかる需給推計(確定値)について」資料より抜粋 URL :
https://www.mhlw.go.jp/stf/houdou/0000088998.html
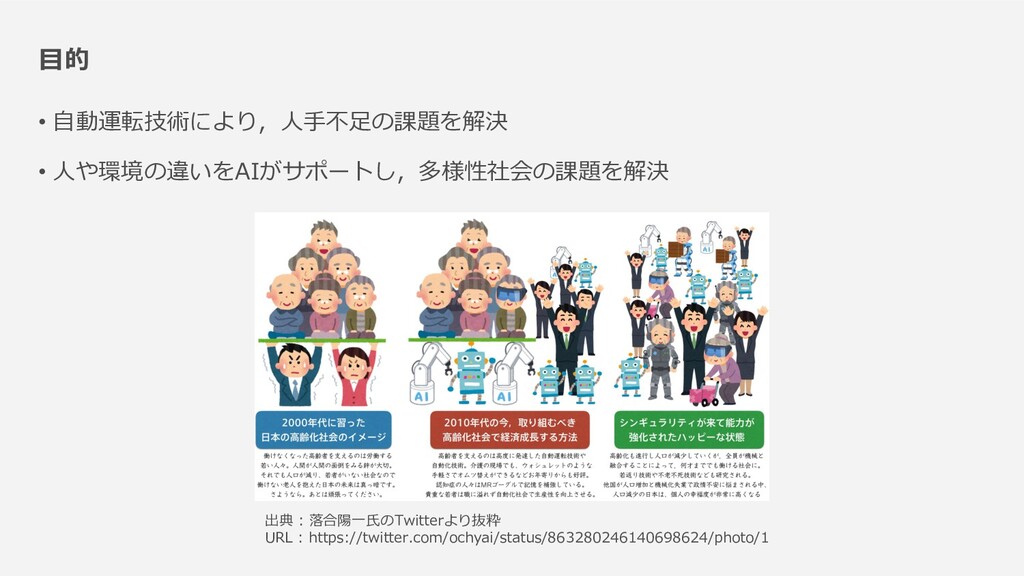
⽬的 • ⾃動運転技術により,⼈⼿不⾜の課題を解決 • ⼈や環境の違いをAIがサポートし,多様性社会の課題を解決 出典 : 落合陽⼀⽒のTwitterより抜粋 URL :
https://twitter.com/ochyai/status/863280246140698624/photo/1
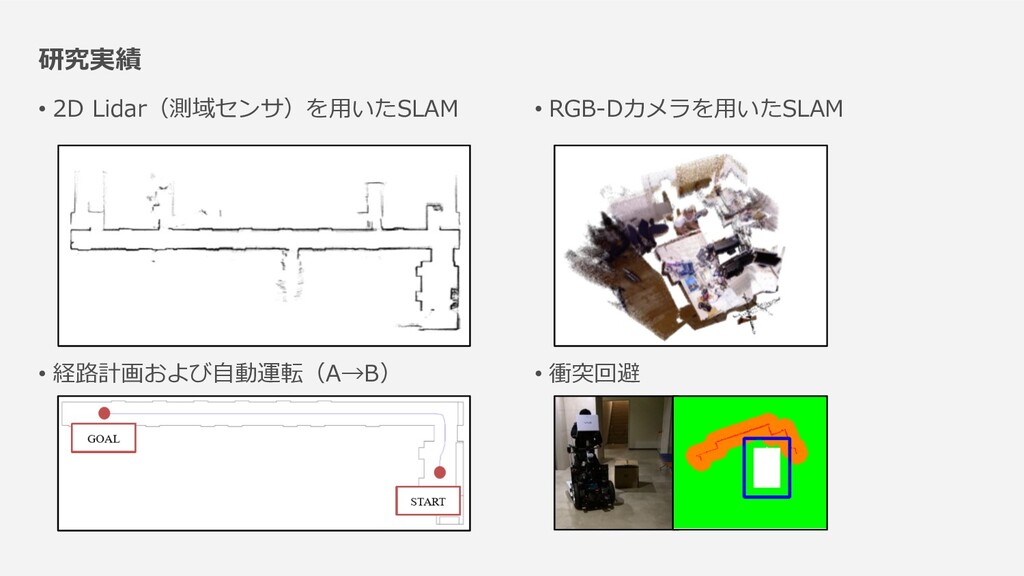
研究実績 • 2D Lidar(測域センサ)を⽤いたSLAM • 経路計画および⾃動運転(A→B) • RGB-Dカメラを⽤いたSLAM • 衝突回避
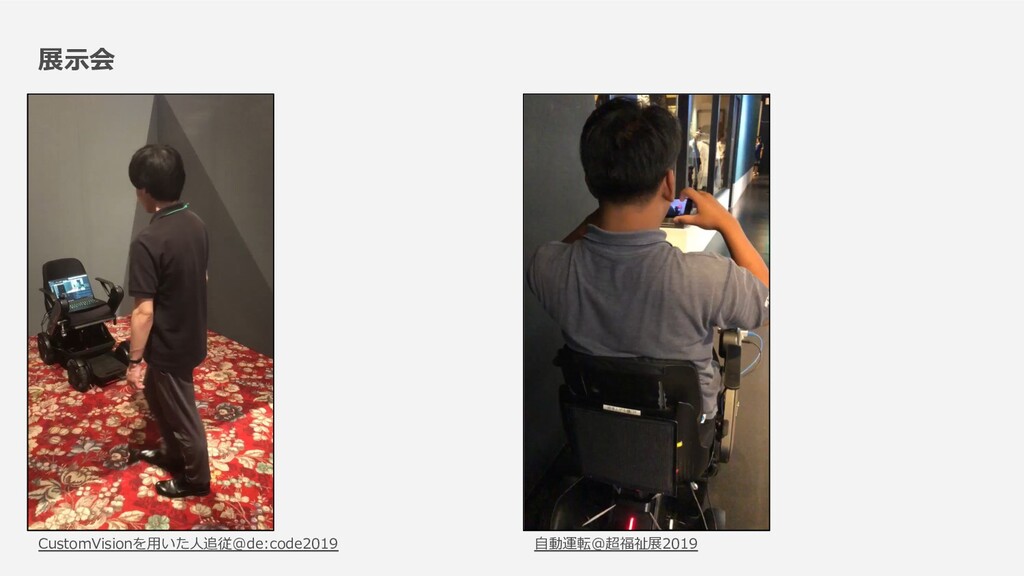
展⽰会 ⾃動運転@超福祉展2019 CustomVisionを⽤いた⼈追従@de:code2019
システム概要(ハードウェア) • WHILL Model CR • SLAM⽤のセンサ︓Intel RealSense T265 および
D435 • 制御⽤PC(Windows10, Core i7,RAM 8GB,SSD 1TB) • ⽂字・画像表⽰⽤LED • マップ表⽰およびゴール指定⽤タブレット PCもしくはディスプレイ
システム概要(ソフトウェア) • プログラミング⾔語︓Python 3.6.9 • 主なライブラリ︓WHILL Model CR SDK,Intel RealSense
SDK,OpenCV,Open3D 初期位置推定 マップデータベース ⾃⼰位置推定 Visual Odometry ローカルマップ作成 Mapping 衝突回避 Obstacle Avoidance 経路計画 Local Path Planning ゴール指定 Global Path Planning 制御 Control
マップ作成 • SLAMによるマップ作成の様⼦
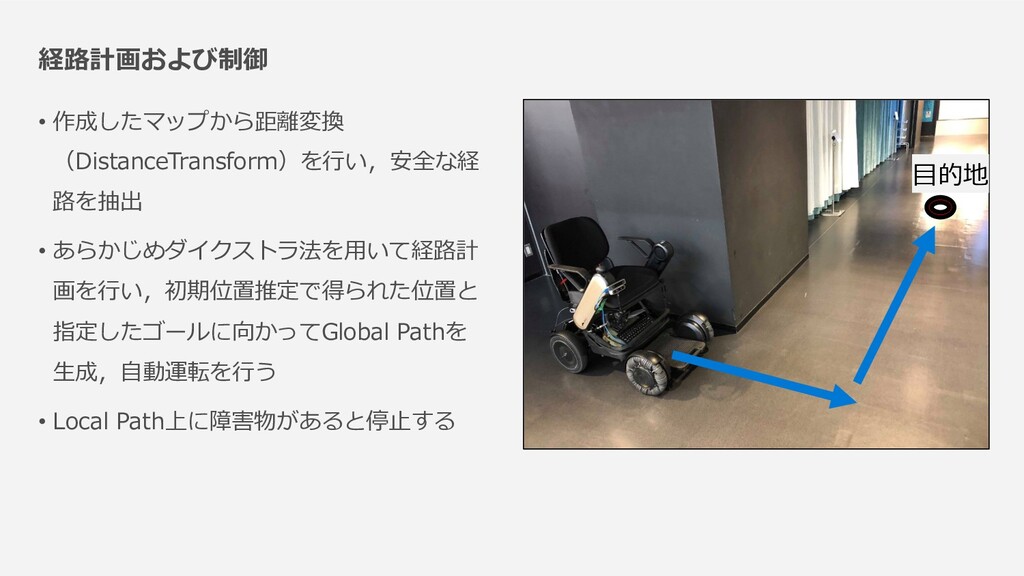
経路計画および制御 • 作成したマップから距離変換 (DistanceTransform)を⾏い,安全な経 路を抽出 • あらかじめダイクストラ法を⽤いて経路計 画を⾏い,初期位置推定で得られた位置と 指定したゴールに向かってGlobal Pathを
⽣成,⾃動運転を⾏う • Local Path上に障害物があると停⽌する ⽬的地
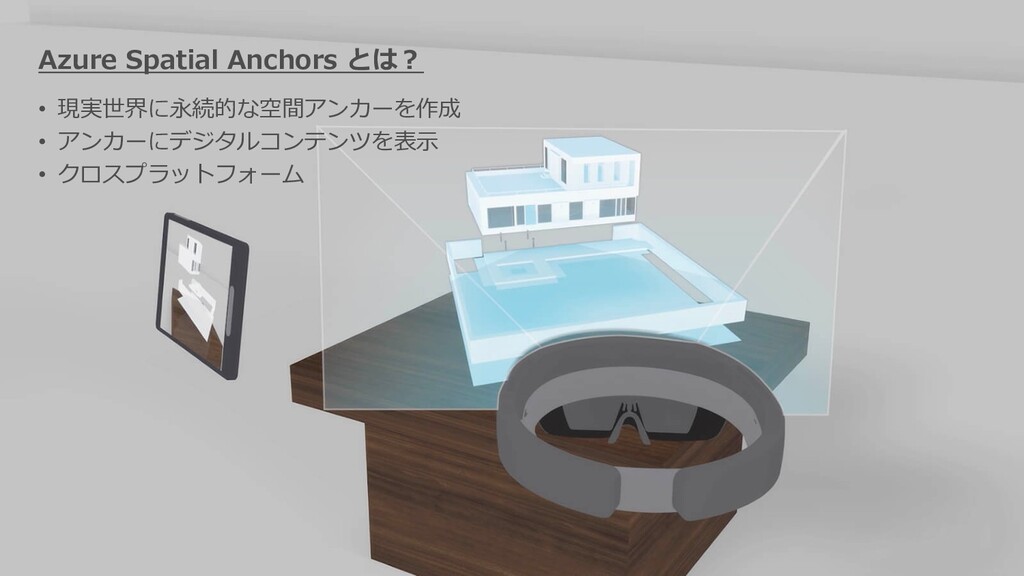
Azure Spatial Anchors とは︖ • 現実世界に永続的な空間アンカーを作成 • アンカーにデジタルコンテンツを表⽰ • クロスプラットフォーム
͍Θ͖ࢢདྷञҪ۠෮ڵެӦॅ
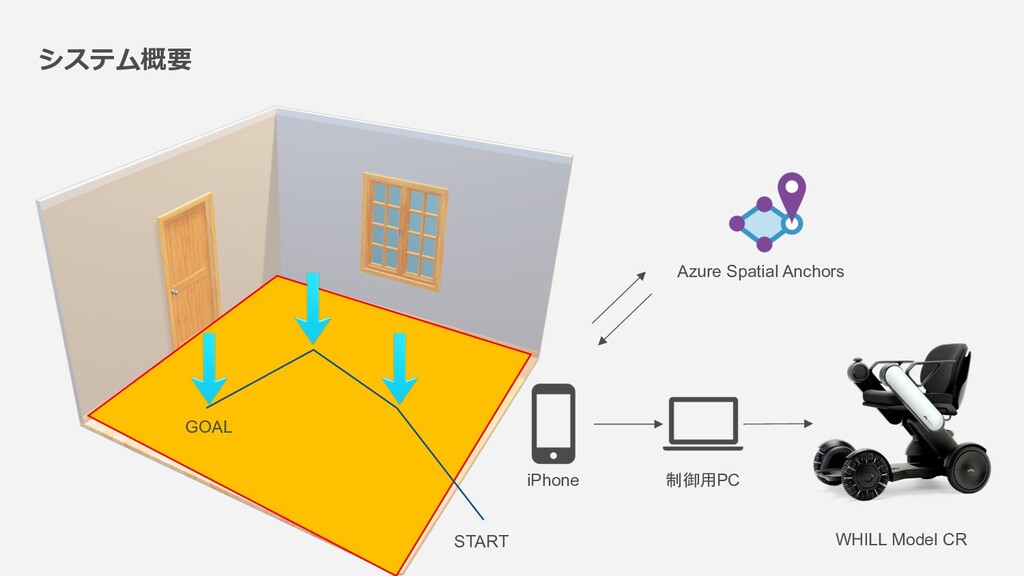
システム概要 WHILL Model CR 制御用PC iPhone GOAL Azure Spatial Anchors
START
空間をスキャン
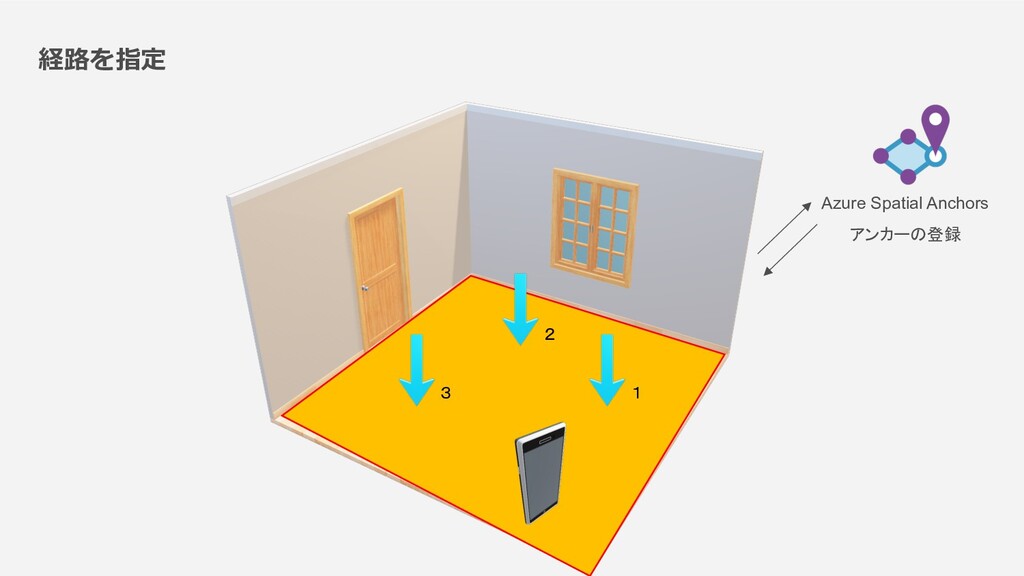
経路を指定 1 2 3 Azure Spatial Anchors アンカーの登録
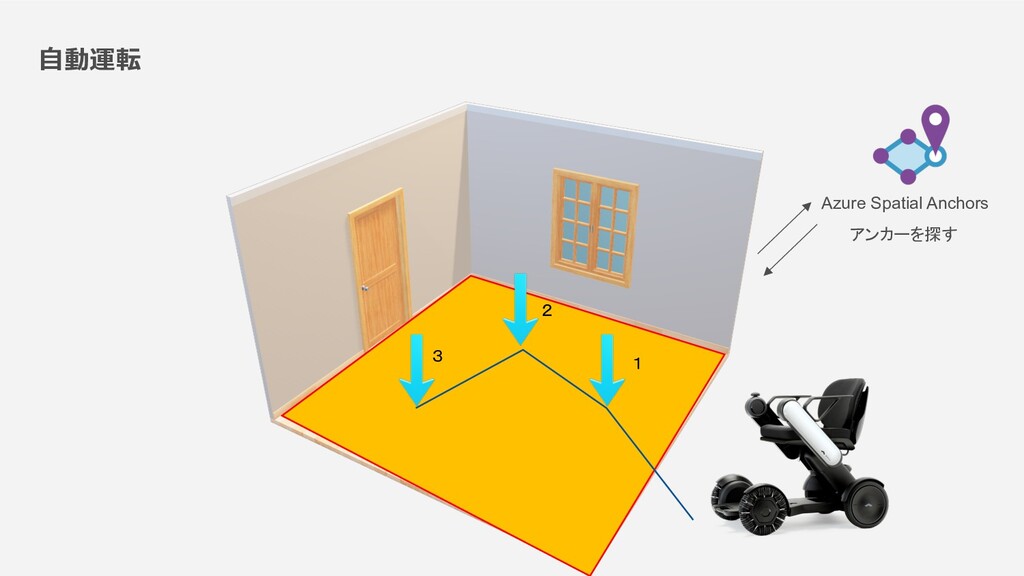
⾃動運転 1 2 3 Azure Spatial Anchors アンカーを探す
デモ • 経路指定 • ⾃動運転
まとめ • iPhoneを載せるだけで⾃動運転できた • マイ経路案内をみんなで共有するアプリとしてまずはリリースしていく
HoloLens2 体験 • ナレコムVR2 • 3Dモデルビューアー • プレイグラウンド • ⿃が寄ってくる
• アイトラッキングによるオートスクロール • ハンドトラッキングによるピアノ演奏 • Surfaces • 様々なシェーダーが楽しめる触る球体 • Graffiti 3D • 空間にお絵かき • MRTK Examples Hub • MRTKのサンプル • Type in Space • 空間に⽂字を配置
イベント告知 • 熊本GTFS-JP活⽤勉強会 vol.1 • Yo! Tech Night? 4 ⽇時
2020/3/4(⽔) 19:00-21:00 場所 えきまえスペース(熊本駅⽩川⼝前) 参加費 500円(会場代) ⽇時 2020/2/12(⽔) 19:00-21:00 場所 えきまえスペース(熊本駅⽩川⼝前) 参加費 500円(会場代)
ご清聴ありがとうございました
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}