Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
モバイルAR技術の最先端 Google Tangoを活用してバーチャル道案内スタッフを実現してみた
Search
GMO次世代
May 16, 2017
Technology
1.4k
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
モバイルAR技術の最先端 Google Tangoを活用してバーチャル道案内スタッフを実現してみた
2017年5月11日 GMOエンジニアトークにて公開
GMO次世代
May 16, 2017
More Decks by GMO次世代
See All by GMO次世代
ソース公開を通じて分かった非中央集権型アプリケーション(DApp)とは
jisedai
0
4.5k
AppleのARkitとGoogleの最新のARプラットフォーム ARCore 可能性と応用
jisedai
2
1.4k
IoT領域でのブロックチェーン実践
jisedai
1
2k
深層学習は金融市場をシミュレーションすることができるか?
jisedai
1
6.9k
Unity3DとOculus Riftで VR空間にWebコンテンツを表現する
jisedai
0
1.6k
ブロックチェーンを利用したサービス開発について
jisedai
1
1.3k
Deep Learningによる株価変動の予想
jisedai
0
1.8k
Other Decks in Technology
See All in Technology
AI驚き屋発見器
yama3133
1
390
それでも、技術なブログを書く理由 #kichijojipm / Why I Still Write Tech Blogs Even Now
shinkufencer
0
1.4k
テックカンファレンス三大ステークホルダーの文化人類学 ─ 違いを認め合う関係性作り
bash0c7
5
1.4k
Claude Code並行開発環境の ムダ‧ムラ‧ムリを見直した話
muranakaaa
0
370
CTOキーノート:AI時代の「つなぐ」を再定義 ― 真のIoTとリアルワールドAI【SORACOM Discovery 2026】
soracom
PRO
0
330
AI Agent を本番環境へ―― Microsoft Foundry × Azure Serverless で作る Enterprise-Ready な基盤
shibayan
PRO
1
970
カメラ×AIで挑む「ホワイト物流」― 車両管理、自動化の壁と突破口【SORACOM Discovery 2026】
soracom
PRO
0
180
ウォーターフォール開発案件のPMとしてAI活用を模索している話
hatahata021
2
240
AIQAのナレッジ構築について
qatonchan
1
140
GMOフィナンシャルゲートが挑む、「止まらない」決済インフラ構築の裏側【SORACOM Discovery 2026】
soracom
PRO
0
110
システム監視入門
grimoh
5
780
新しい SLO が良い感じにハマっている話
z63d
2
1.6k
Featured
See All Featured
AI in Enterprises - Java and Open Source to the Rescue
ivargrimstad
0
1.4k
Agile Actions for Facilitating Distributed Teams - ADO2019
mkilby
0
230
Fight the Zombie Pattern Library - RWD Summit 2016
marcelosomers
234
17k
Ecommerce SEO: The Keys for Success Now & Beyond - #SERPConf2024
aleyda
1
2.1k
Tell your own story through comics
letsgokoyo
1
1k
We Are The Robots
honzajavorek
0
290
New Earth Scene 8
popppiees
3
2.4k
Refactoring Trust on Your Teams (GOTO; Chicago 2020)
rmw
35
3.7k
Have SEOs Ruined the Internet? - User Awareness of SEO in 2025
akashhashmi
0
400
Groundhog Day: Seeking Process in Gaming for Health
codingconduct
0
260
Let's Do A Bunch of Simple Stuff to Make Websites Faster
chriscoyier
508
140k
Building the Perfect Custom Keyboard
takai
2
820
Transcript
1 1 モバイルAR技術の最先端 Google Tangoを活⽤して バーチャル案内スタッフを実現してみた GMOインターネット 次世代システム研究室
2 2 1. 背景&モチベーション 2. Google Tango についての紹介 3. 解決すべき課題
4. 課題解決⽅法とTangoの強みの活⽤ 5. まとめ 6. デモ案内 ⽬次
3 3 突然ですが、 空港で国際線の乗り継ぎ時、 道に迷った事がありますか? 背景&モチベーション
4 4 展⽰会、博物館で 旅館で 地下鉄、駅で ショッピングモールで
5 5 ⾔葉の壁 案内スタッフがいて、案内してくれても⾔葉が通じない ⼈⼿不⾜&対応が⼤変 限られた⼈間のスタッフで、すべてのお客さんに対応ができません
6 6 案内スタッフがいなくても モバイルAR技術の最先端 Google Tangoで バーチャル案内スタッフを作れないか?
7 7 Unityちゃん
8 8 バーチャル案内スタッフを実現してみた
9 9 マーカーレスAR/MRプラットフォーム 奥⾏き感知、モーショントラッキング 領域学習 3つのコア技術 屋内ナビゲーション向け トータルソリューション Google Tangoとは
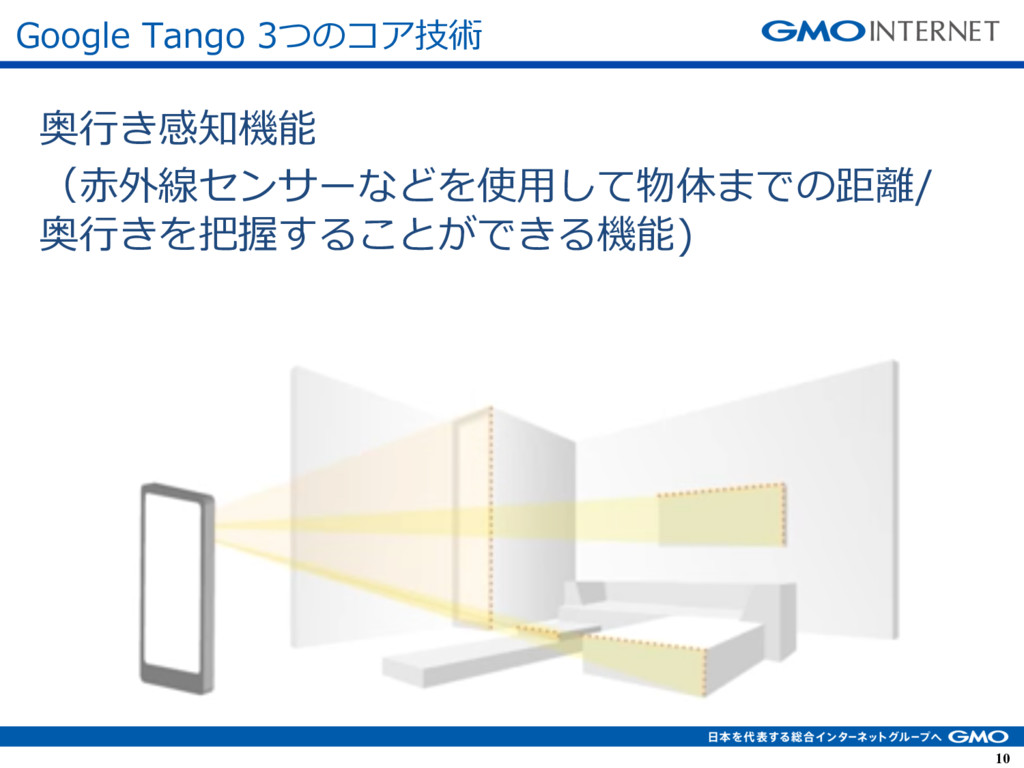
10 10 奥⾏き感知機能 (⾚外線センサーなどを使⽤して物体までの距離/ 奥⾏きを把握することができる機能) Google Tango 3つのコア技術
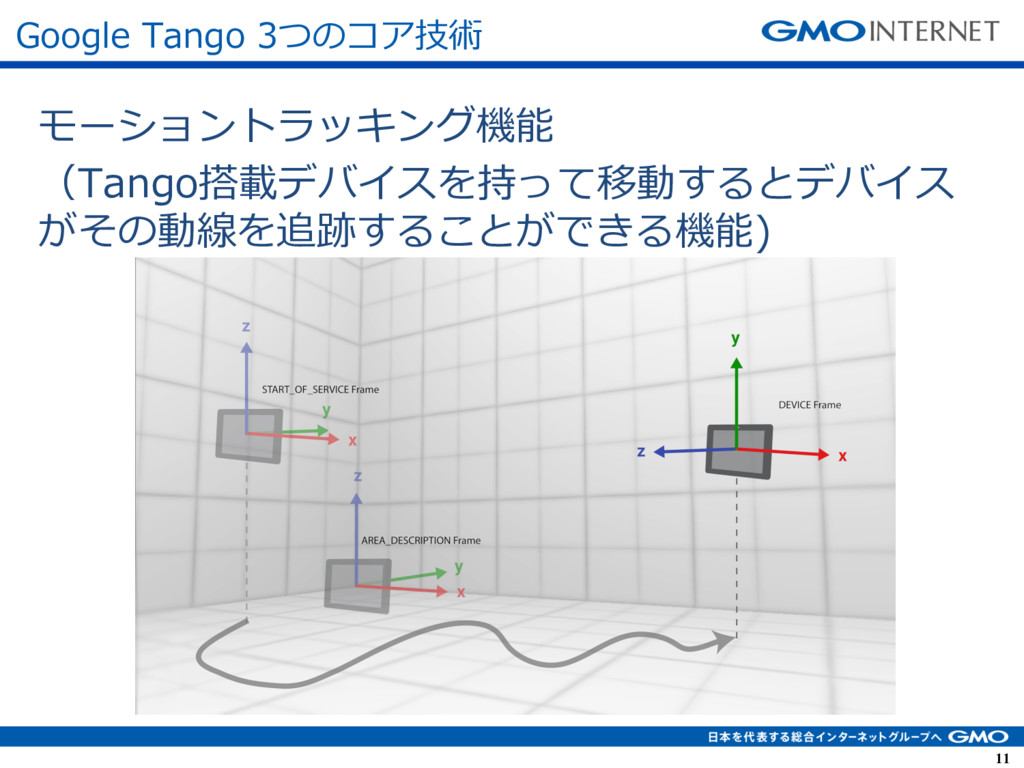
11 11 Google Tango 3つのコア技術 モーショントラッキング機能 (Tango搭載デバイスを持って移動するとデバイス がその動線を追跡することができる機能)
12 12 Google Tango 3つのコア技術 領域学習機能 (Tango搭載デバイスが空間の重要な特徴を学習し、 その空間領域を認識することができる機能)
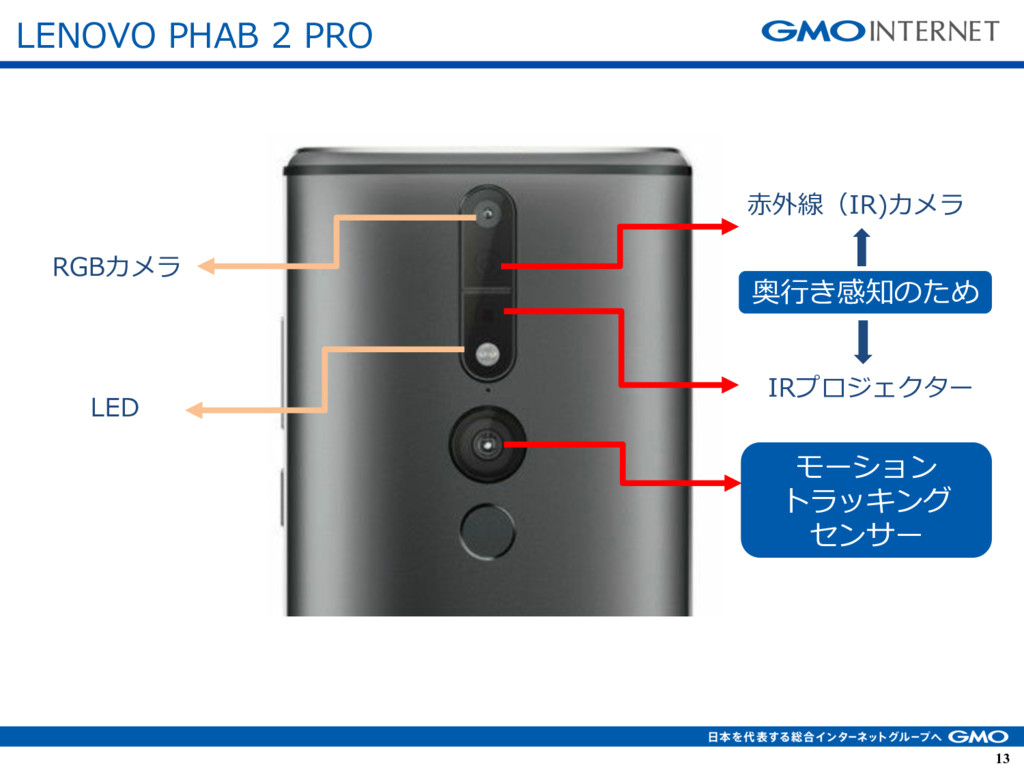
13 13 LENOVO PHAB 2 PRO ⾚外線(IR)カメラ IRプロジェクター RGBカメラ LED
奥⾏き感知のため モーション トラッキング センサー
14 14 バーチャル案内スタッフを 実現する際、解決すべき課題
15 15 1. バーチャル案内スタッフを地⾯に⽴たせる (現実と⾼度な融合) 2. バーチャル案内スタッフを動かす 3. バーチャル案内スタッフをしゃべらせる 解決すべき課題
16 16 4.奥⾏きのレンダリング問題 (xyz軸におけるz軸の課題解決) 5. デバイスの動き、位置及び向きを把握し、 バーチャル空間へ反映(同期) 6. 案内先まで空間を学習させ、道案内ができ るようにする
解決すべき課題
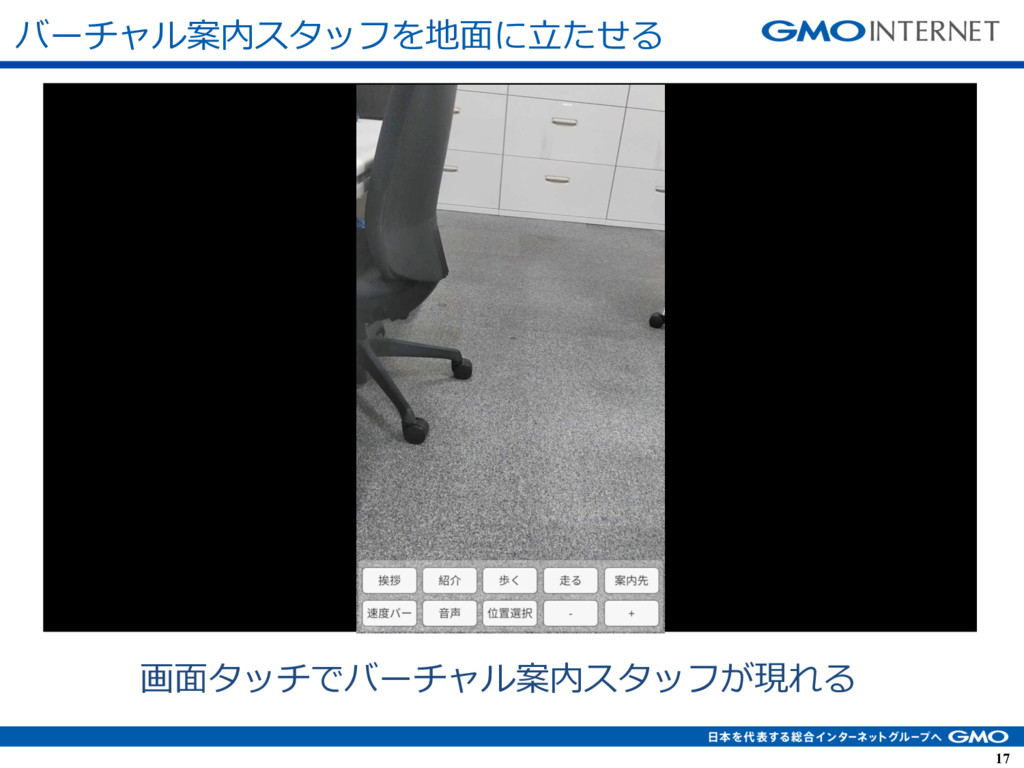
17 17 画⾯タッチでバーチャル案内スタッフが現れる バーチャル案内スタッフを地⾯に⽴たせる
18 18 ToF:光の到達時間で距離 を計測する⽅法 •⾚外線(IR)カメラ •IRプロジェクター 奥⾏き感知機能の活⽤ ポイントクラウド (x, y,
z z:奥⾏き情報)
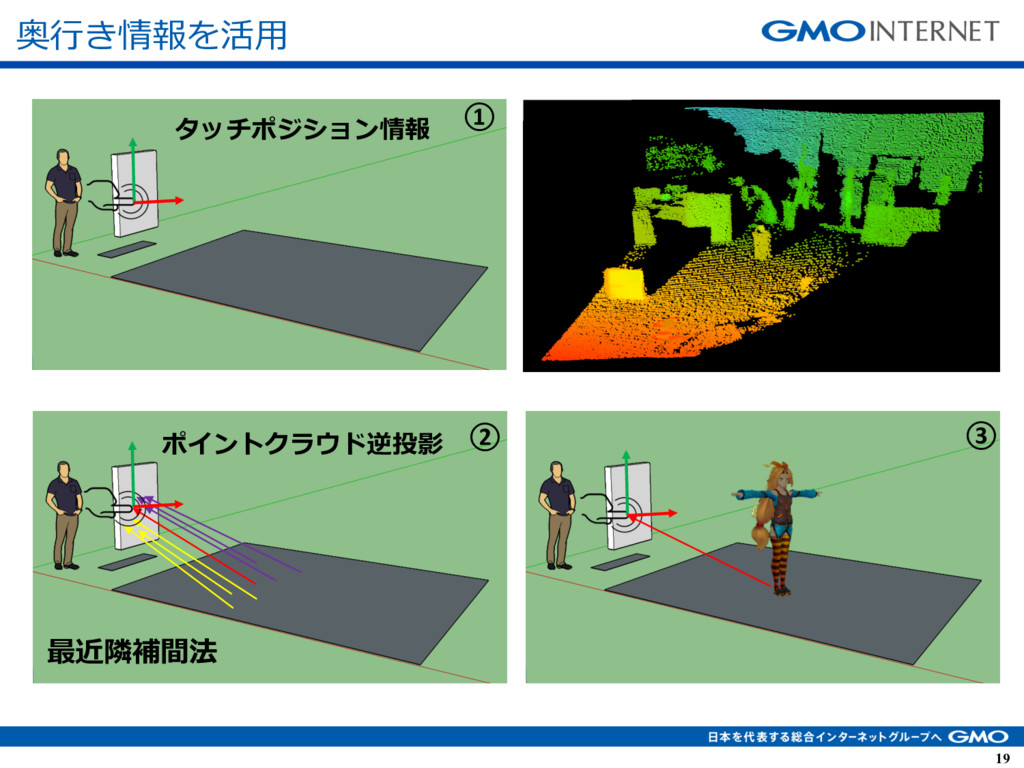
19 19 ポイントクラウド逆投影 最近隣補間法 タッチポジション情報 ① ② ③ 奥⾏き情報を活⽤
20 20 処理前 処理後 奥⾏きのレンダリング問題
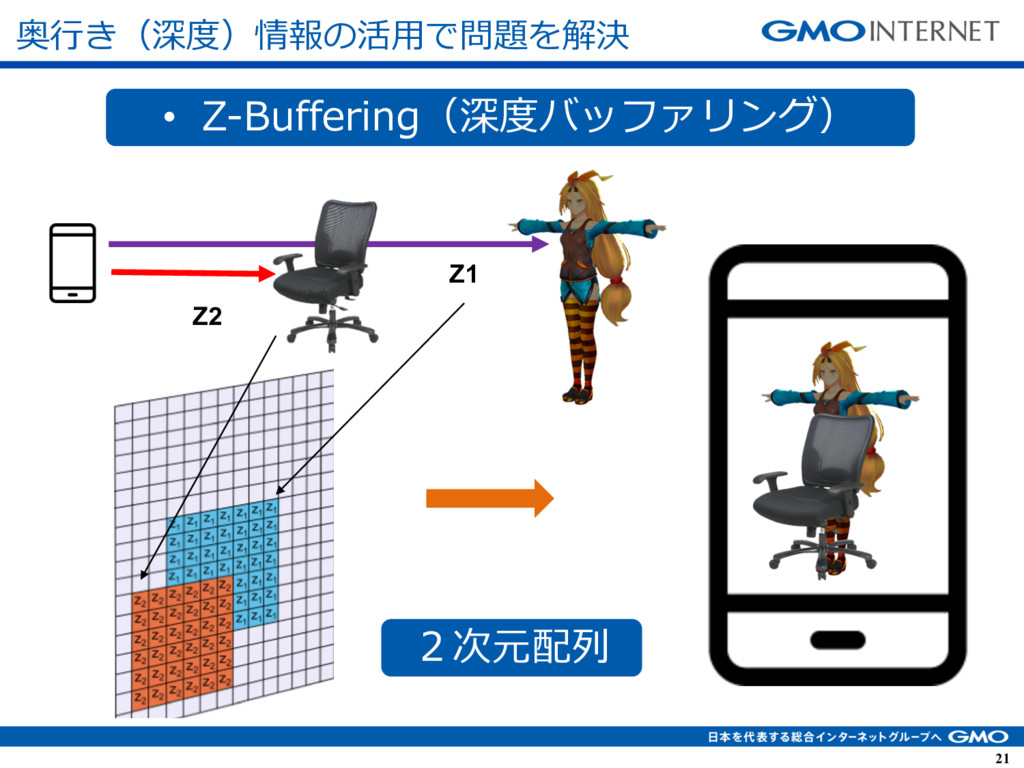
21 21 Z2 Z1 • Z-Buffering(深度バッファリング) 2次元配列 奥⾏き(深度)情報の活⽤で問題を解決
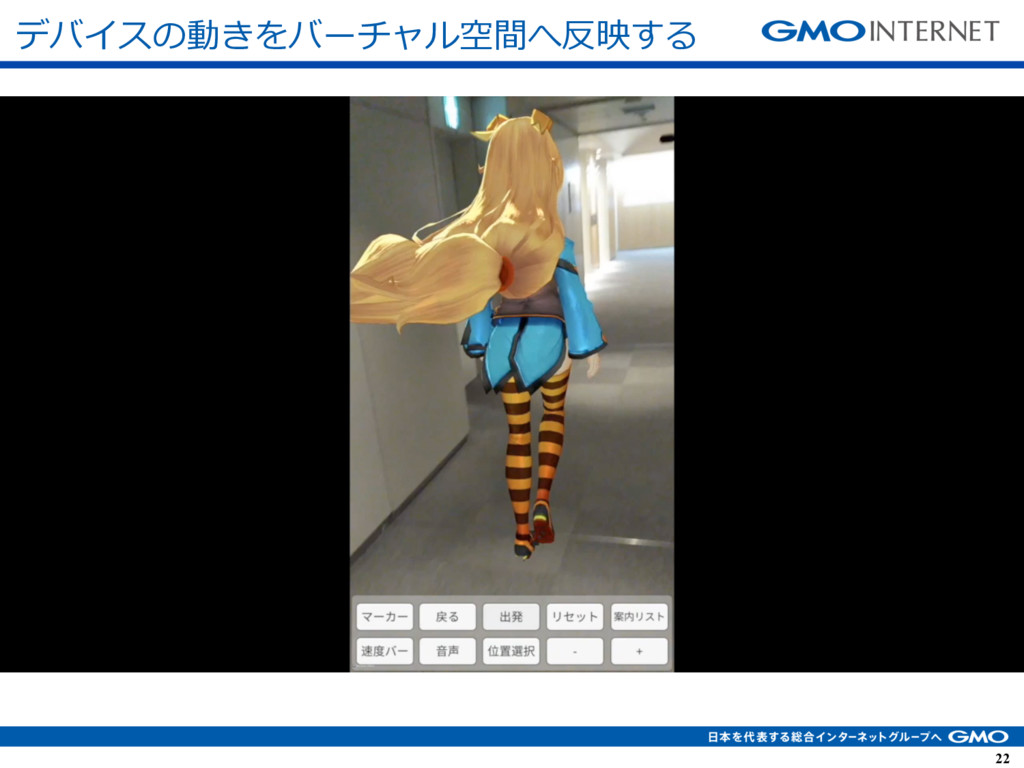
22 22 デバイスの動きをバーチャル空間へ反映する
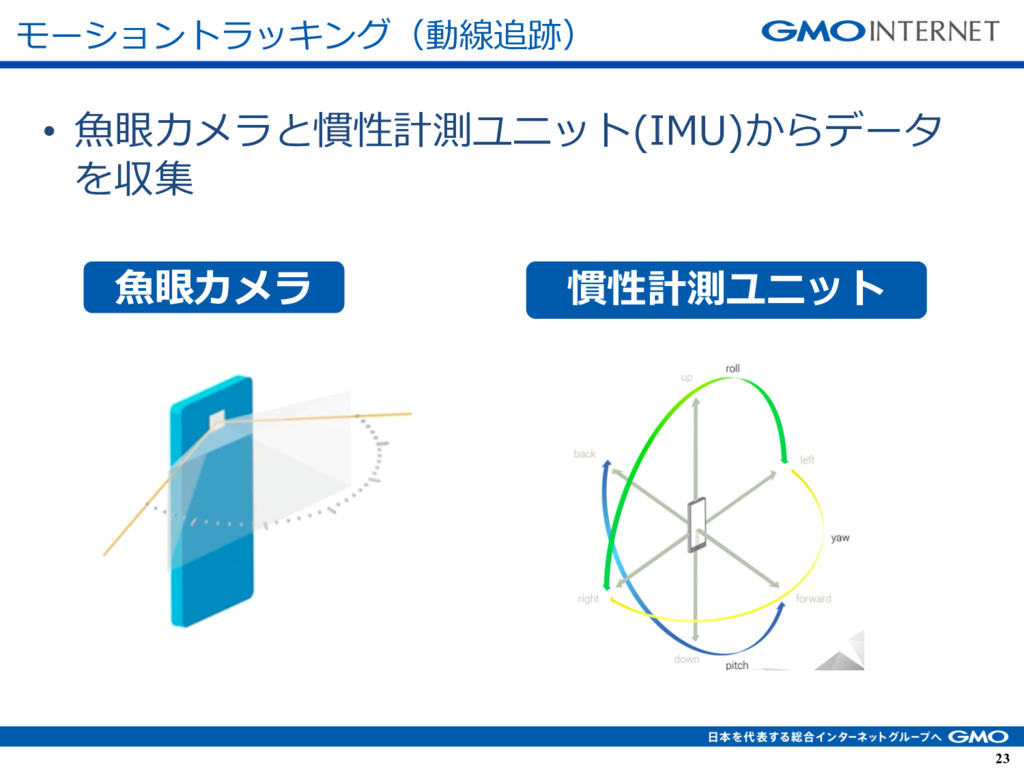
23 23 • ⿂眼カメラと慣性計測ユニット(IMU)からデータ を収集 ⿂眼カメラ 慣性計測ユニット モーショントラッキング(動線追跡)
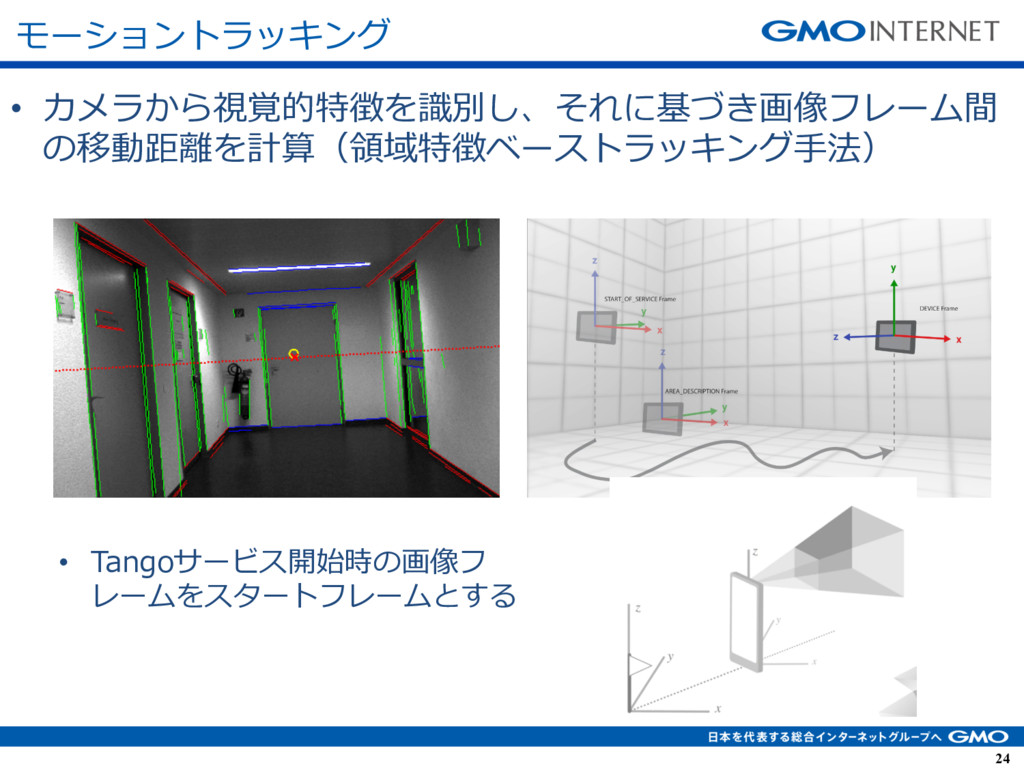
24 24 • カメラから視覚的特徴を識別し、それに基づき画像フレーム間 の移動距離を計算(領域特徴ベーストラッキング⼿法) • Tangoサービス開始時の画像フ レームをスタートフレームとする モーショントラッキング
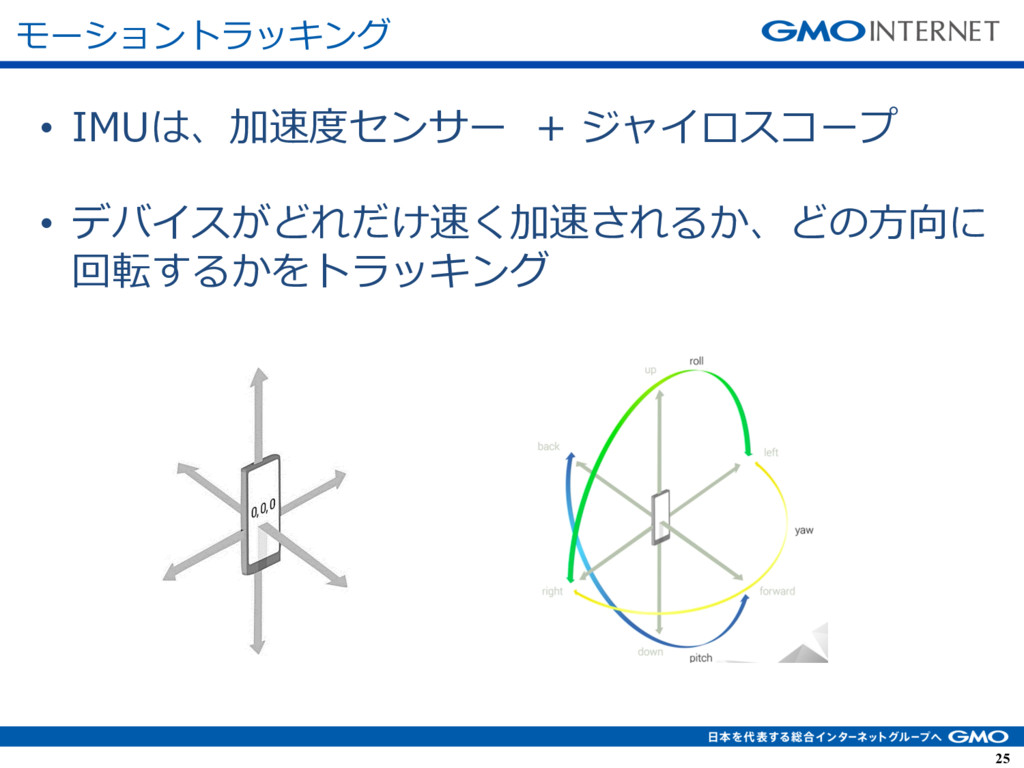
25 25 • IMUは、加速度センサー + ジャイロスコープ • デバイスがどれだけ速く加速されるか、どの⽅向に 回転するかをトラッキング モーショントラッキング
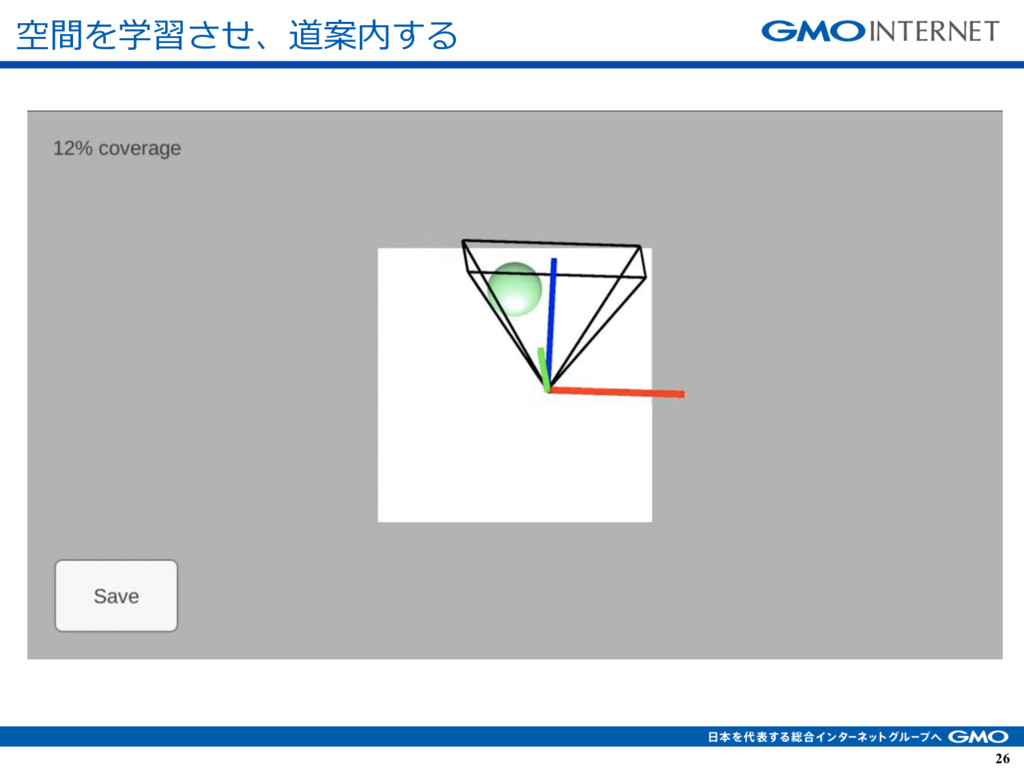
26 26 空間を学習させ、道案内する
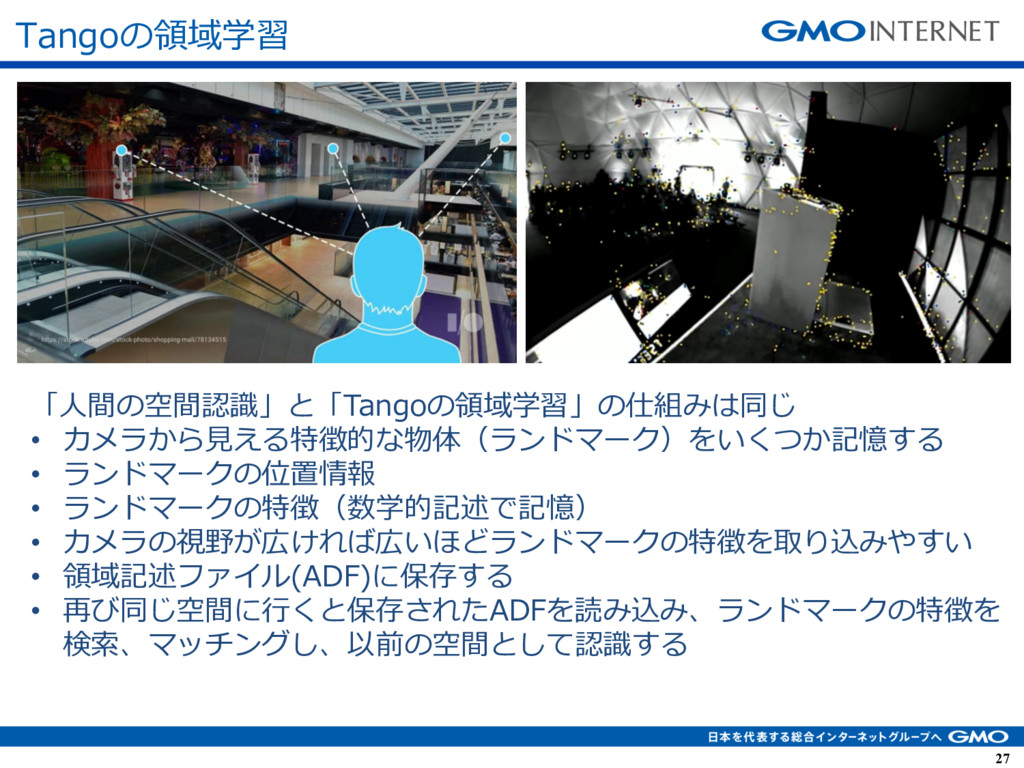
27 27 「⼈間の空間認識」と「Tangoの領域学習」の仕組みは同じ • カメラから⾒える特徴的な物体(ランドマーク)をいくつか記憶する • ランドマークの位置情報 • ランドマークの特徴(数学的記述で記憶) •
カメラの視野が広ければ広いほどランドマークの特徴を取り込みやすい • 領域記述ファイル(ADF)に保存する • 再び同じ空間に⾏くと保存されたADFを読み込み、ランドマークの特徴を 検索、マッチングし、以前の空間として認識する Tangoの領域学習
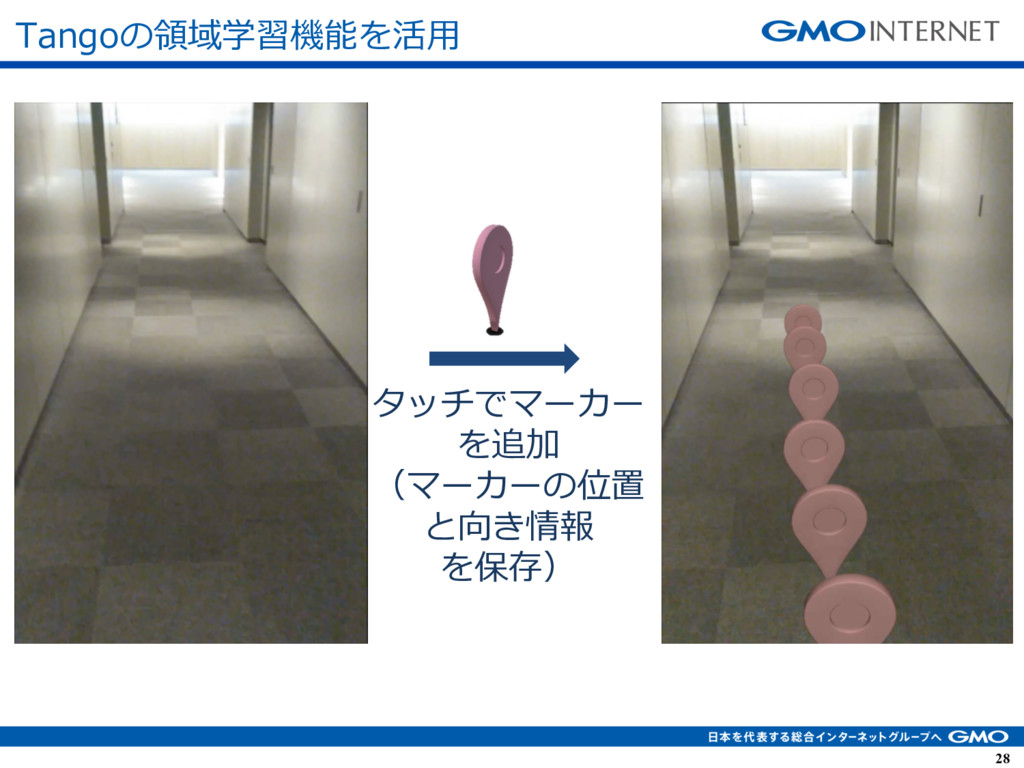
28 28 タッチでマーカー を追加 (マーカーの位置 と向き情報 を保存) Tangoの領域学習機能を活⽤
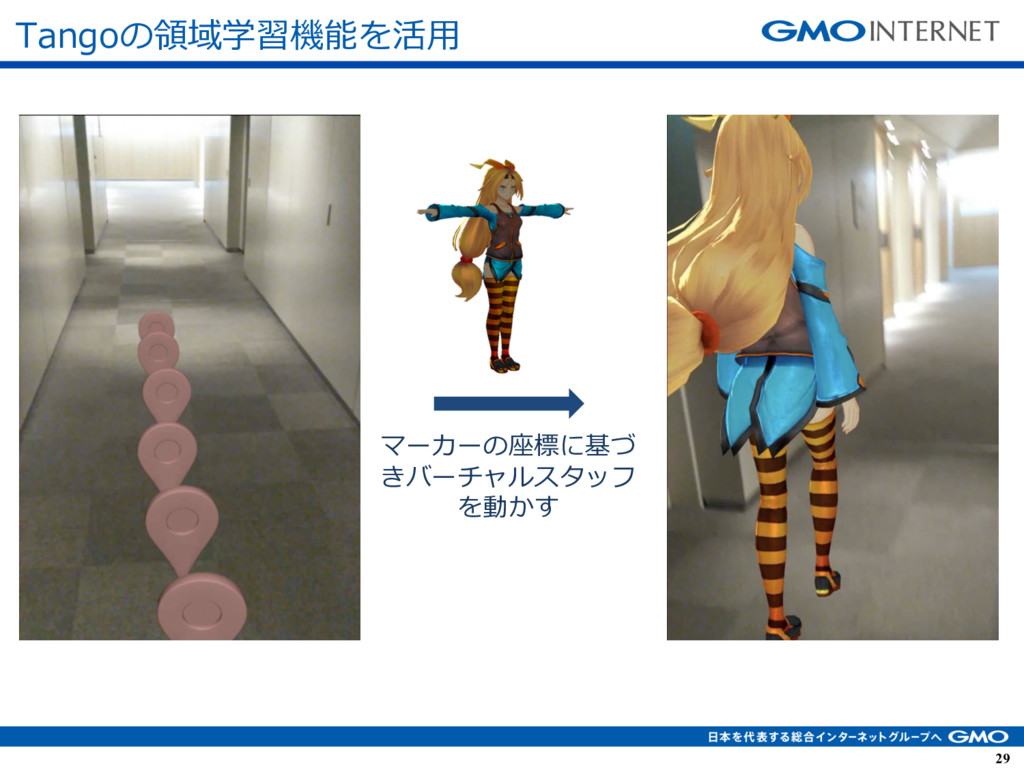
29 29 マーカーの座標に基づ きバーチャルスタッフ を動かす Tangoの領域学習機能を活⽤
30 30 まとめ
31 31 § Tangoの3つのコアテクノロジー(奥⾏き知覚、 モーショントラッキング、領域学習)を活⽤して 、バーチャル道案内スタッフを実現してみた § わかったTangoの特徴: ü 学習速度・空間認識が早い
ü モーショントラッキング及び屋内ナビゲーショ ン精度が⾼い ü GPSがうまくいかない環境(地下や建物)のナ ビゲーションに役に⽴つ まとめ
32 32 § Tangoをサポートするコンシューマー端末はまだ 少ない(Lenovo PhabPro2) § 今後、ASUS ZenFone AR
登場予定 まとめ
33 33 DEMO デモの案内
34 34 § バーチャルスタッフの表⽰と基本動作 § 領域学習とマーカーの追加 § 保存データ(ADF)を利⽤し、道案内 デモの案内
35 35 ご清聴いただき ありがとうございました
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}