Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Visual Explanation Generation for Road Damage C...
Search
Sponsored
·
SiteGround - Reliable hosting with speed, security, and support you can count on.
→
Semantic Machine Intelligence Lab., Keio Univ.
PRO
November 21, 2023
Technology
550
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Visual Explanation Generation for Road Damage Classification by Using Layer-wise Relevance Propagation for Branch Networks
Semantic Machine Intelligence Lab., Keio Univ.
PRO
November 21, 2023
More Decks by Semantic Machine Intelligence Lab., Keio Univ.
See All by Semantic Machine Intelligence Lab., Keio Univ.
[Journal club] Predict Before You Explore: Predictive Planning with Specialized Memory for Embodied Question Answering
keio_smilab
PRO
0
81
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning
keio_smilab
PRO
0
86
[Journal club] ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
keio_smilab
PRO
0
110
[Journal club] ReLaGS: Relational Language Gaussian Splatting
keio_smilab
PRO
0
120
[Journal club] Flow as the Cross-Domain Manipulation Interface
keio_smilab
PRO
0
98
Mobi-𝜋: Mobilizing Your Robot Learning Policy
keio_smilab
PRO
0
160
A Gentle Introduction to Transformers
keio_smilab
PRO
16
7k
FlowAR: Scale-wise Autoregressive Image Generation Meets Flow Matching
keio_smilab
PRO
0
60
[Journal club] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
keio_smilab
PRO
1
150
Other Decks in Technology
See All in Technology
CDKで書くECSのベストプラクティス、 改めて考え直す2026 #cdkconf2026
makies
3
930
大量データに対しても、生成AIを用いてリーズナブルにデータ加工をしたい!Databricksのai_queryについて調べてみた
kamoshika
1
280
PHPで作って学ぶリアルタイム音声対話AIとWebSocket入門 by ムナカタ
munakata
0
130
仕様駆動開発、導入半年。「本当に速くなってるの?」にデータで答える / AICon2026_hirakawa
rakus_dev
0
320
2026年のソフトウェア開発を考える(2026/07版) / Agentic Software Engineering 2026-07 Findy Edition
twada
PRO
25
10k
それでも、技術なブログを書く理由 #kichijojipm / Why I Still Write Tech Blogs Even Now
shinkufencer
0
330
VPCセキュリティ対応の最新事情
nagisa53
1
240
『モデル + ハーネス』で読み解く AIエージェント入門
oracle4engineer
PRO
2
160
データと地図で読む 大井町の「かわるもの、かわらないもの」
yoshiyama_hana
0
130
AIが当たり前の組織で エンジニアはどう育つか
nishihira
1
960
AIコード生成×サプライチェーン攻撃 — PHPが直面する“二重の信頼問題
shinyasaita
0
450
Network Firewallやっていき!
news_it_enj
0
260
Featured
See All Featured
Un-Boring Meetings
codingconduct
0
350
Making Projects Easy
brettharned
120
6.7k
Designing Dashboards & Data Visualisations in Web Apps
destraynor
231
55k
How to Get Subject Matter Experts Bought In and Actively Contributing to SEO & PR Initiatives.
livdayseo
0
160
Site-Speed That Sticks
csswizardry
13
1.3k
Designing for Timeless Needs
cassininazir
1
390
Building a Scalable Design System with Sketch
lauravandoore
463
34k
We Analyzed 250 Million AI Search Results: Here's What I Found
joshbly
1
1.6k
Technical Leadership for Architectural Decision Making
baasie
3
440
Why Mistakes Are the Best Teachers: Turning Failure into a Pathway for Growth
auna
0
190
Efficient Content Optimization with Google Search Console & Apps Script
katarinadahlin
PRO
1
730
Primal Persuasion: How to Engage the Brain for Learning That Lasts
tmiket
0
390
Transcript
飯⽥ 紡1, ⼩槻 誠太郎1, 平川 翼2, ⼭下 隆義2, 藤吉 弘亘2,
杉浦 孔明1 1慶應義塾⼤学 2中部⼤学 クラック分類タスクにおける Layer-wise Relevance Propagation for Branch Networksを⽤いた視覚的説明⽣成
背景:深層学習モデルの説明性向上は汎化性能につながり重要 - 1 - 深層学習モデルの説明性は重要 ▪ 説明責任の強化(医療・⾦融など) ▪ 未解明な理論の解明(太陽フレア[Iida+, ACCV22]など)
▪ クレバーハンス効果[Pfungst, 1907]の発⾒ 磁場画像 視覚的説明 道路画像+視覚的説明 注⽬度:⾼ 低
背景:深層学習モデルの説明性向上は汎化性能につながり重要 - 2 - 深層学習モデルの説明性は重要 ▪ 説明責任の強化(医療・⾦融など) ▪ 未解明な理論の解明(太陽フレア[Iida+, ACCV22]など)
▪ クレバーハンス効果[Pfungst, 1907]の発⾒ Magnetogram画像 視覚的説明 道路画像+視覚的説明 注⽬度:⾼ 低 太陽フレアの専⾨家 「フレアが⽩い部分から出て ⿊い部分に⼊る結果と⼀致 しており興味深い」
背景:深層学習モデルの説明性向上は汎化性能につながり重要 - 3 - 深層学習モデルの説明性は重要 ▪ 説明責任の強化(医療・⾦融など) ▪ 未解明な理論の解明(太陽フレア[Iida+, ACCV22]など)
▪ クレバーハンス効果[Pfungst, 1907]の発⾒ Magnetogram画像 視覚的説明 注⽬度:⾼ 低 道路画像+視覚的説明 Googleのロゴに注⽬して分類 クレバーハンス効果の発⾒
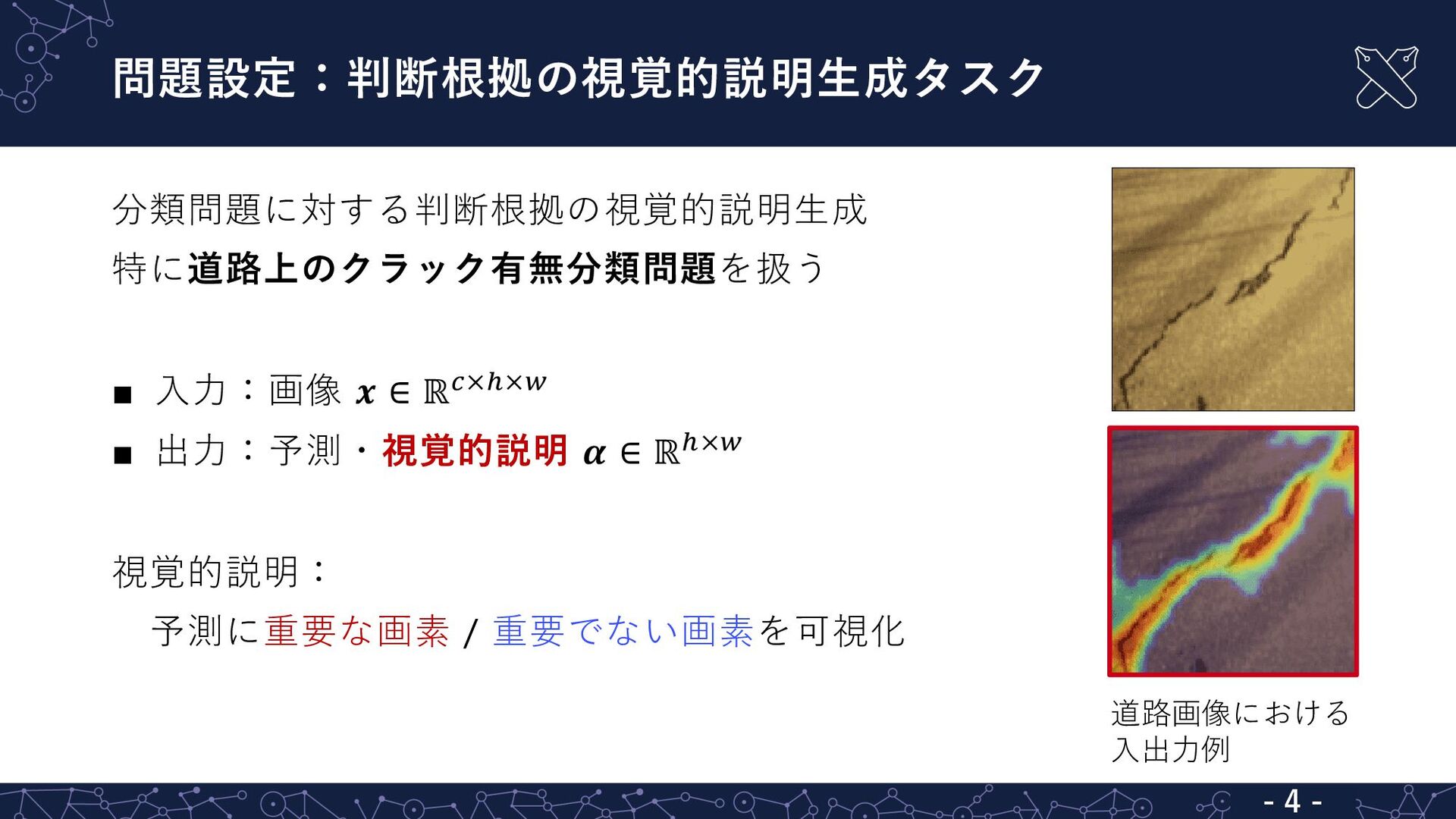
問題設定:判断根拠の視覚的説明⽣成タスク - 4 - 分類問題に対する判断根拠の視覚的説明⽣成 特に道路上のクラック有無分類問題を扱う ▪ ⼊⼒:画像 𝒙 ∈
ℝ!×#×$ ▪ 出⼒:予測・視覚的説明 𝜶 ∈ ℝ#×$ 視覚的説明: 予測に重要な画素 / 重要でない画素を可視化 道路画像における ⼊出⼒例
関連研究: Attention Branch Network (ABN) [Fukui+, CVPR19] - 5 -
説明⽣成専⽤のモジュール Attention Branchをブランチ構造として導⼊ ▪ Attention map 𝛼% を予測時にも利⽤ ▪ Cyclic connectionを持つ ▪ Attention Branch⾃体がブラックボックスになってしまう Feature Extractor 𝒙 input 𝑝 # 𝒚 !" 𝑝 # 𝒚 #" ⊙ 𝒉 Attention Branch Perception Branch 𝜶$: attention map 𝒉 ⊙ 𝜶$
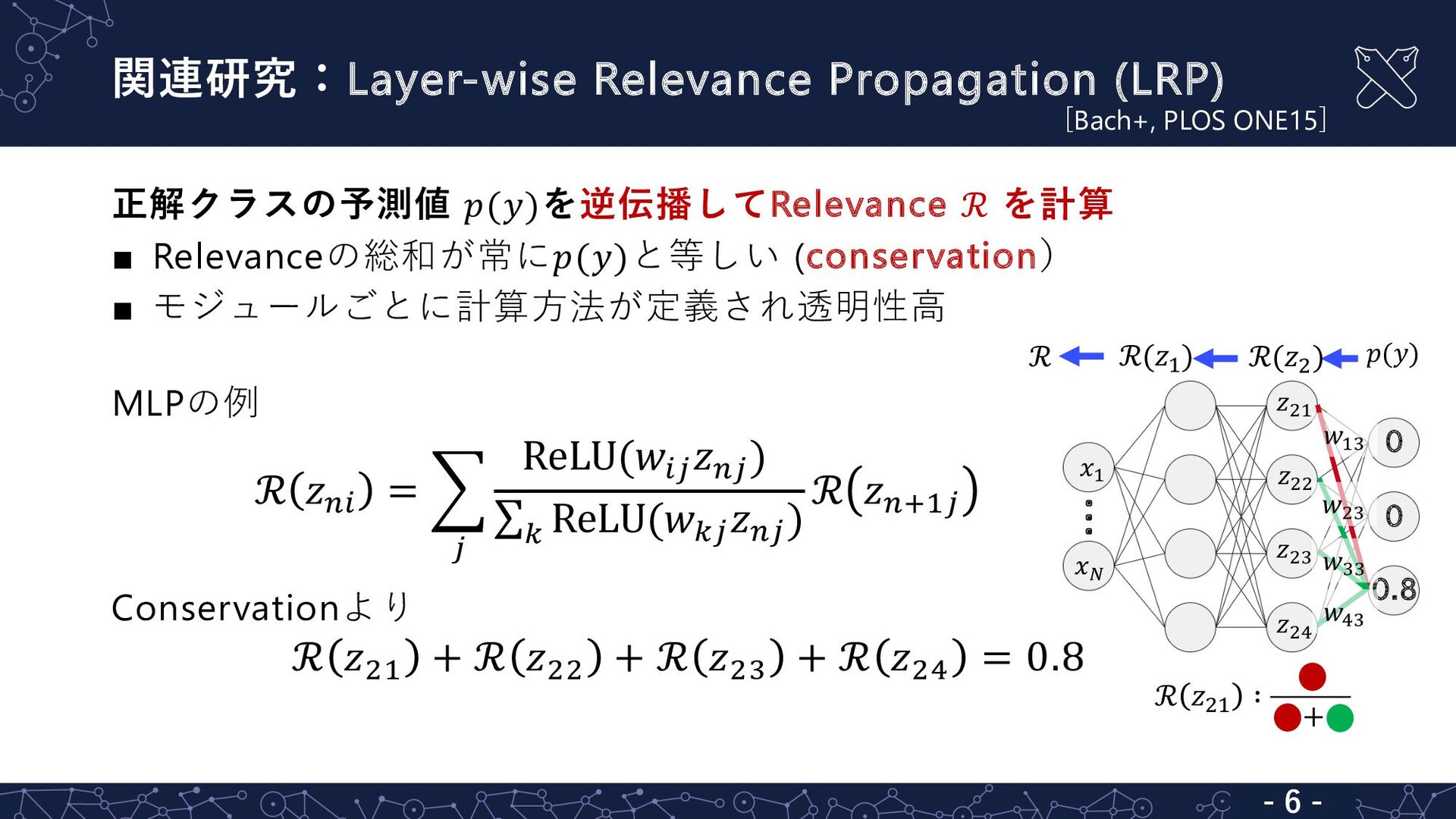
関連研究:Layer-wise Relevance Propagation (LRP) - 6 - 正解クラスの予測値 𝑝(𝑦)を逆伝播してRelevance ℛ
を計算 ▪ Relevanceの総和が常に𝑝(𝑦)と等しい (conservation) ▪ モジュールごとに計算⽅法が定義され透明性⾼ MLPの例 Conservationより ℛ 𝑧%& + ℛ 𝑧%% + ℛ 𝑧%' + ℛ 𝑧%( = 0.8 0.8 … 0 0 𝑧!" 𝑧!! 𝑧!# 𝑧!$ 𝑥" 𝑥% ℛ 𝑝(𝑦) ℛ(𝑧!) ℛ(𝑧") ℛ 𝑧-. = 0 / ReLU(𝑤./ 𝑧-/ ) ∑0 ReLU(𝑤0/ 𝑧-/ ) ℛ 𝑧-1&/ ℛ 𝑧!" ∶ + 𝑤"# 𝑤$# 𝑤## 𝑤!# [Bach+, PLOS ONE15]
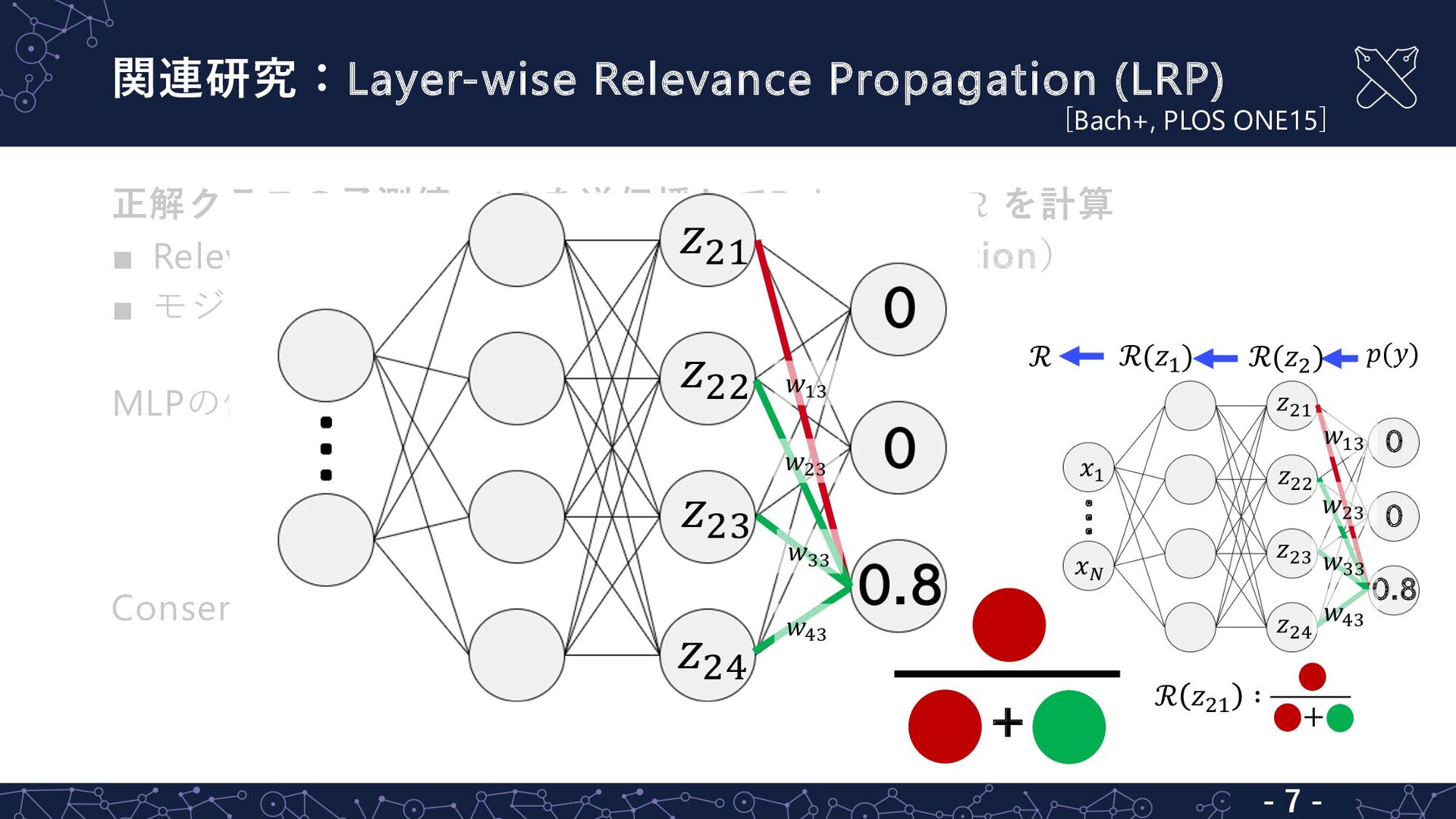
ℛ 𝑧-. = 0 / ReLU(𝑤./ 𝑧-/ ) ∑0 ReLU(𝑤0/
𝑧-/ ) ℛ 𝑧-1&/ - 7 - 正解クラスの予測値 𝑝(𝑦)を逆伝播してRelevance ℛ を計算 ▪ Relevanceの総和が常に𝑝(𝑦)と等しい (conservation) ▪ モジュールごとに計算⽅法が定義され透明性⾼ MLPの例 Conservationより ℛ 𝑧%& + ℛ 𝑧%% + ℛ 𝑧%' + ℛ 𝑧%( = 0.8 0.8 … 0 0 𝑧!" 𝑧!! 𝑧!# 𝑧!$ 𝑥" 𝑥% ℛ 𝑝(𝑦) ℛ(𝑧!) ℛ(𝑧") ℛ 𝑧!" ∶ + 𝑤"# 𝑤$# 𝑤## 𝑤!# 𝑤$# 𝑤## 𝑤!# + 𝑧!" 𝑤"# 𝑧!! 𝑧!# 𝑧!$ 関連研究:Layer-wise Relevance Propagation (LRP) [Bach+, PLOS ONE15]
XAI for Transformers [Ali+, ICML22] 保全性を満たすようにLRPをTransformer / LayerNormへ適⽤ [Chefer+, CVPR21]
LRPと注意機構のattentionを組み合わせて説明⽣成 [Arras+, WASSA17] RNN, LSTMにLRP適⽤、ゲート構造は逆伝播しない 関連研究:ResNet等のcyclic connectionをもつモデルに 対する適切なLRPの計算⽅法は未確⽴ - 8 - Cyclic connectionを持つモデルに対する適切な計算⽅法が未確⽴ 画像処理では多くがVGG[Simonyan+, ICLR15]を対象 ResNetやAttention Branch Networkにおける計算⽅法は未確⽴ LRP / ResNet
XAI for Transformers [Ali+, ICML22] 保全性を満たすようにLRPをTransformer / LayerNormへ適⽤ [Chefer+, CVPR21]
LRPと注意機構のattentionを組み合わせて説明⽣成 [Arras+, WASSA17] RNN, LSTMにLRP適⽤、ゲート構造は逆伝播しない 関連研究:ResNet等のcyclic connectionをもつモデルに 対する適切なLRPの計算⽅法は未確⽴ - 9 - Cyclic connectionを持つモデルに対する適切な計算⽅法が未確⽴ 画像処理では多くがVGG[Simonyan+, ICLR15]を対象 ResNetやAttention Branch Networkにおける計算⽅法は未確⽴ LRP / ResNet
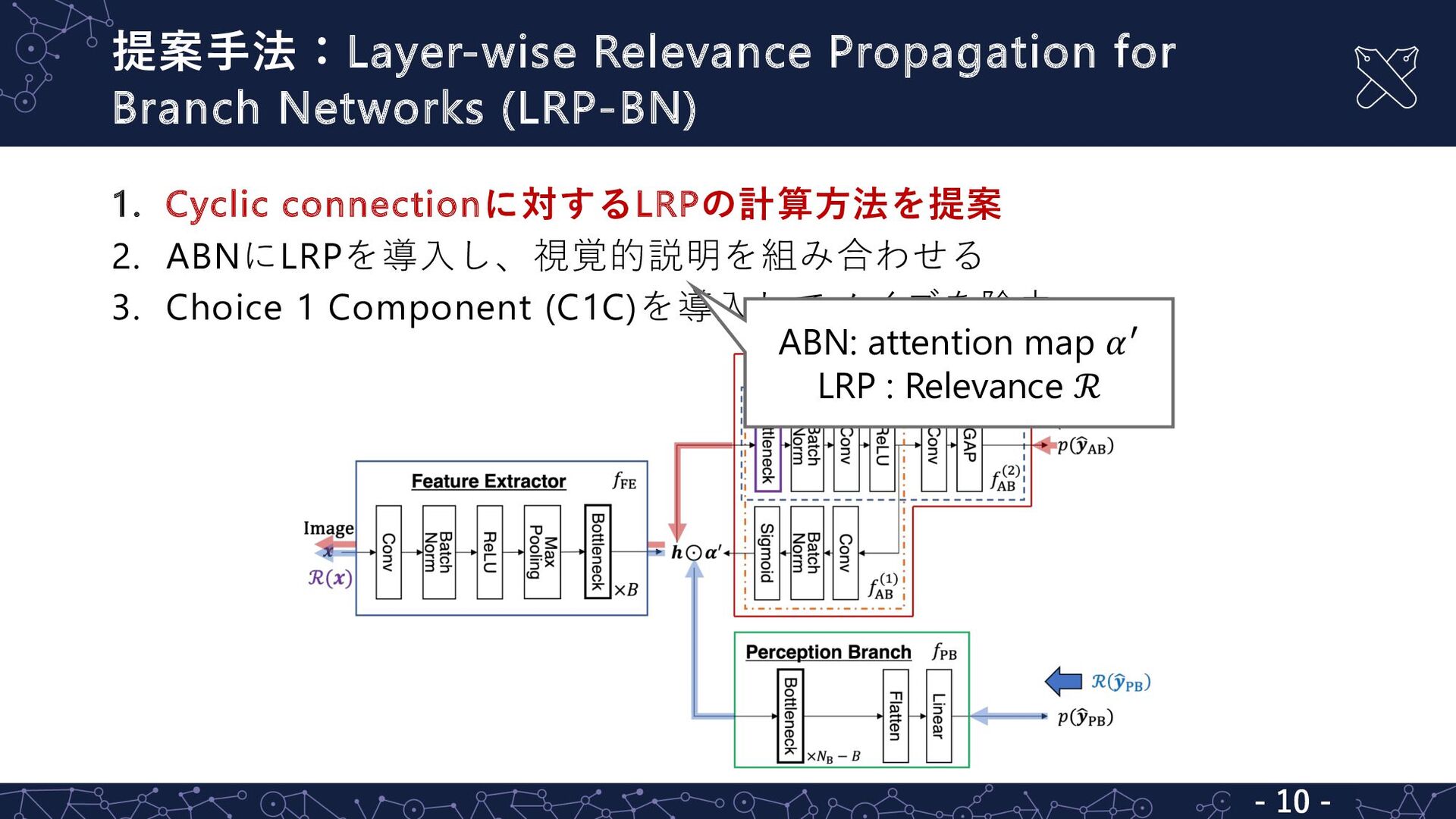
提案⼿法:Layer-wise Relevance Propagation for Branch Networks (LRP-BN) - 10 -
1. Cyclic connectionに対するLRPの計算⽅法を提案 2. ABNにLRPを導⼊し、視覚的説明を組み合わせる 3. Choice 1 Component (C1C)を導⼊してノイズを除去 ABN: attention map 𝛼% LRP : Relevance ℛ
Feature Extractor 𝒙 input 𝑝!" # 𝒚 𝑝#" # 𝒚
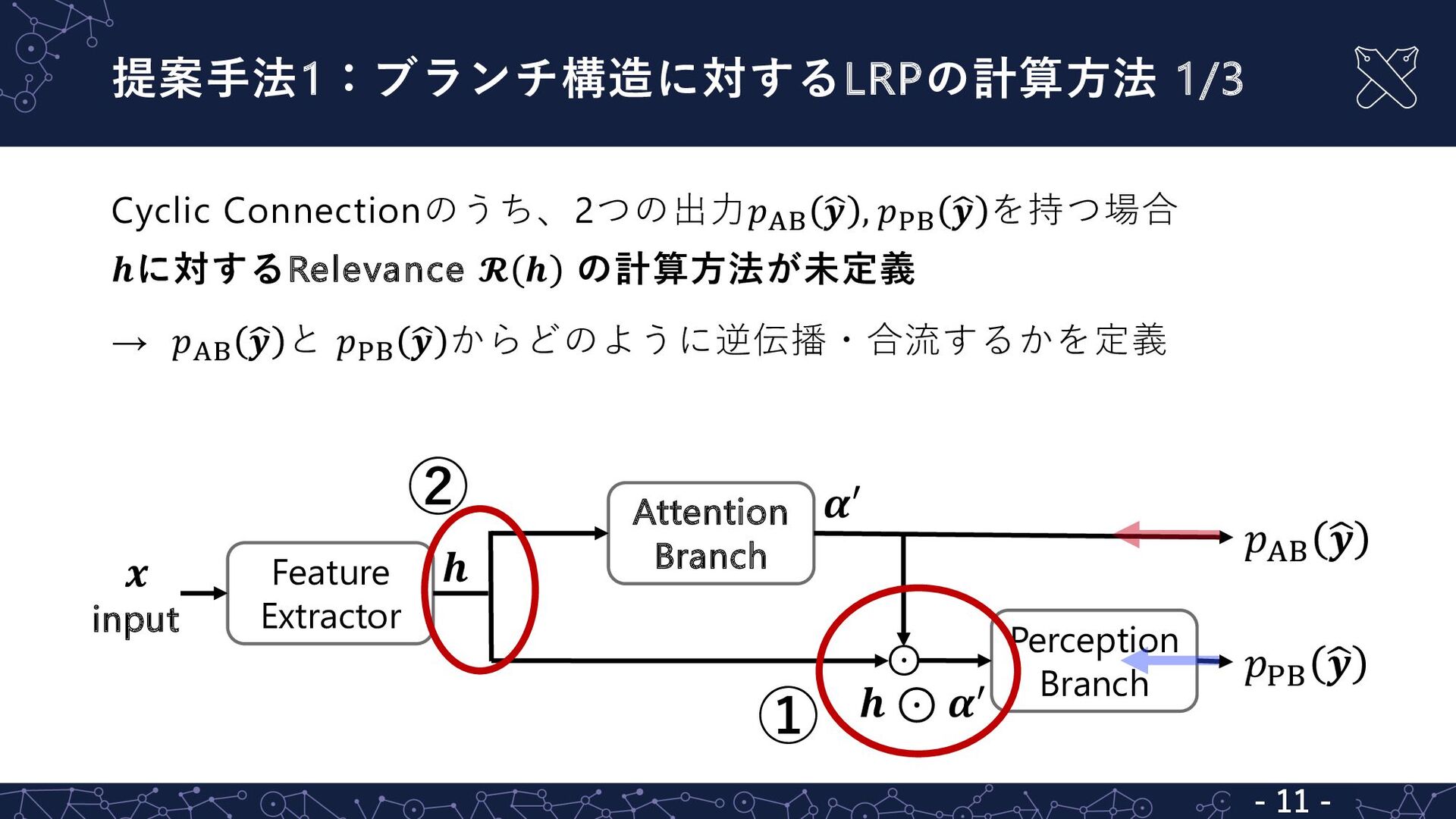
⊙ 𝒉 Attention Branch Perception Branch 𝜶$ 提案⼿法1:ブランチ構造に対するLRPの計算⽅法 1/3 - 11 - Cyclic Connectionのうち、2つの出⼒𝑝-. , 𝒚 , 𝑝/. , 𝒚 を持つ場合 𝒉に対するRelevance 𝓡 𝒉 の計算⽅法が未定義 → 𝑝-. , 𝒚 と 𝑝/. , 𝒚 からどのように逆伝播・合流するかを定義 𝒉 ⊙ 𝜶$ ① ②
Feature Extractor 𝒙 input ⊙ 𝒉 Attention Branch Perception Branch
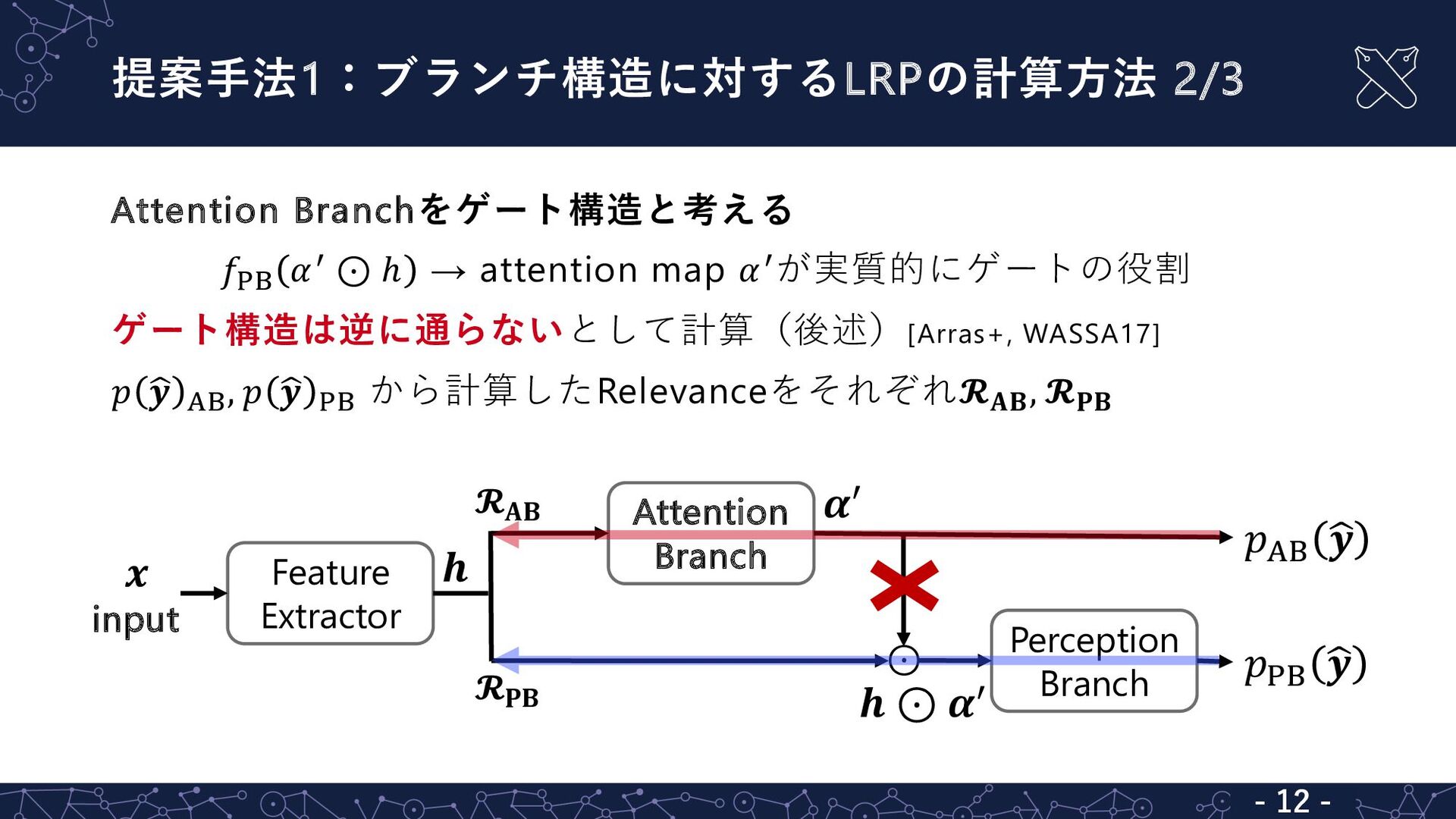
𝜶$ 提案⼿法1:ブランチ構造に対するLRPの計算⽅法 2/3 - 12 - Attention Branchをゲート構造と考える 𝑓/. 𝛼% ⊙ ℎ → attention map 𝛼%が実質的にゲートの役割 ゲート構造は逆に通らないとして計算(後述)[Arras+, WASSA17] 𝑝 , 𝒚 -. , 𝑝 , 𝒚 /. から計算したRelevanceをそれぞれ𝓡𝐀𝐁 , 𝓡𝐏𝐁 𝒉 ⊙ 𝜶$ 𝓡𝐀𝐁 𝓡𝐏𝐁 𝑝!" # 𝒚 𝑝#" # 𝒚
Feature Extractor 𝒙 input ⊙ 𝒉 Attention Branch Perception Branch
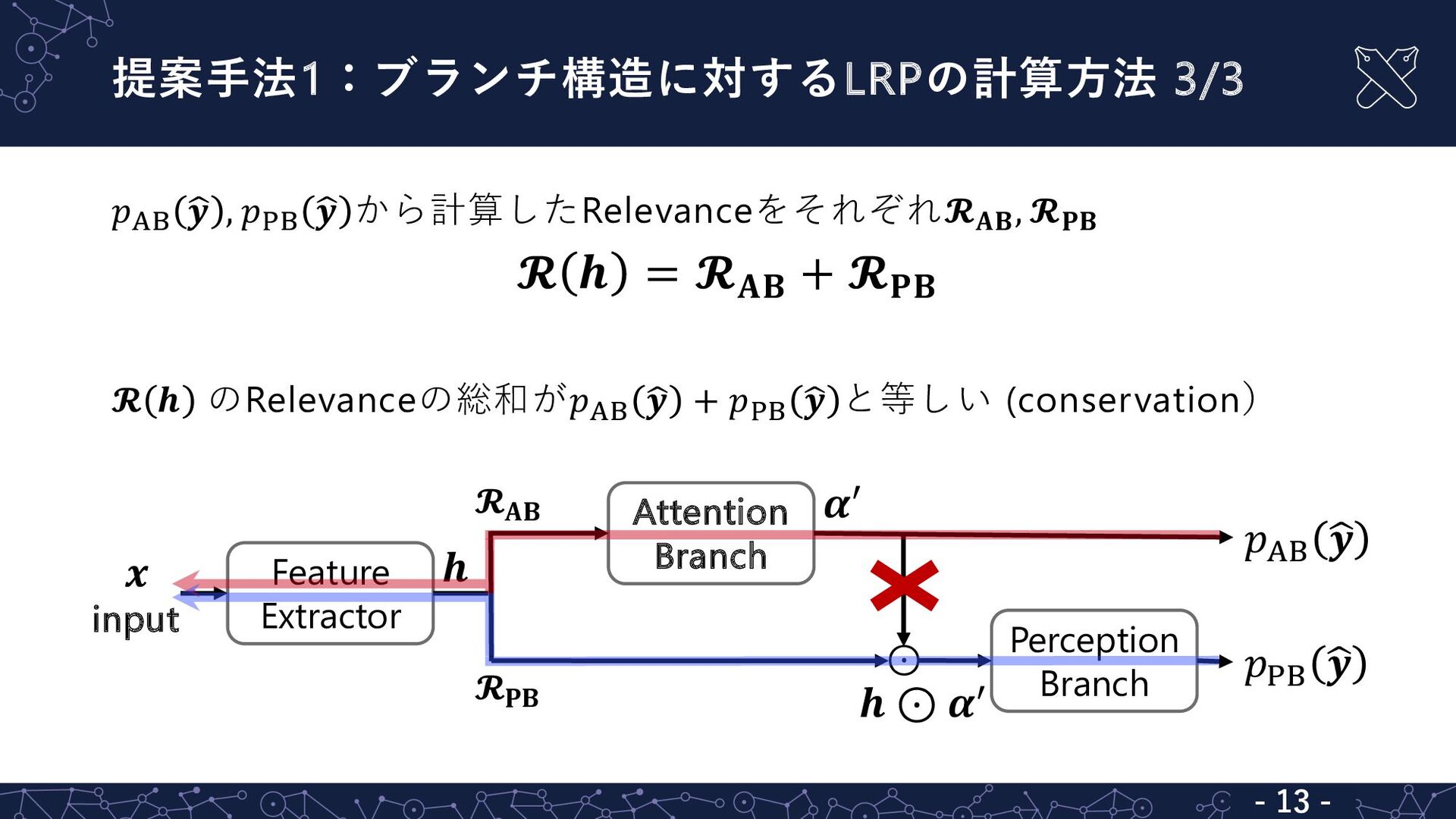
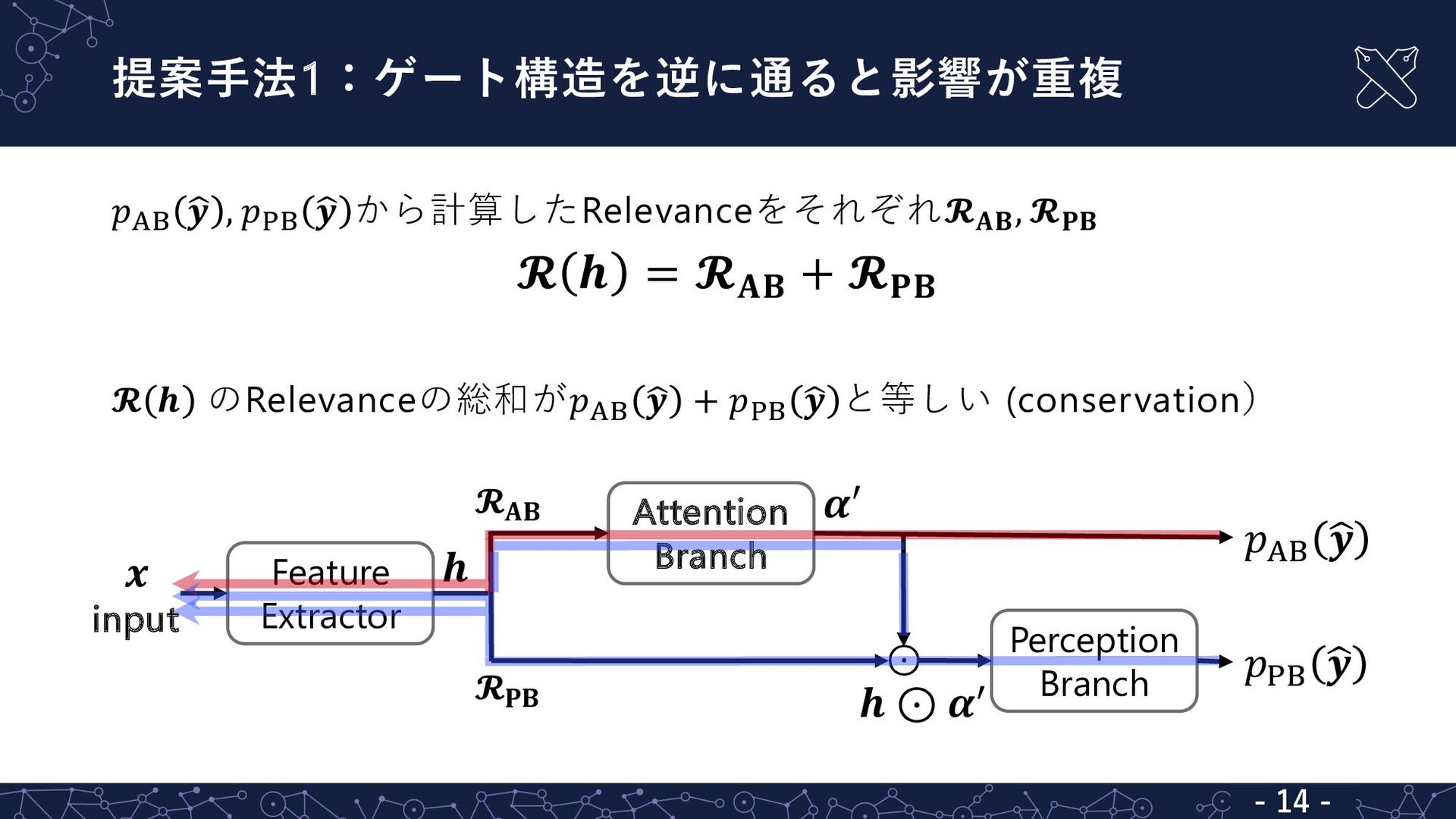
𝜶$ 提案⼿法1:ブランチ構造に対するLRPの計算⽅法 3/3 - 13 - 𝑝-. , 𝒚 , 𝑝/. , 𝒚 から計算したRelevanceをそれぞれ𝓡𝐀𝐁, 𝓡𝐏𝐁 𝓡 𝒉 = 𝓡𝐀𝐁 + 𝓡𝐏𝐁 𝓡 𝒉 のRelevanceの総和が𝑝-. , 𝒚 + 𝑝/. , 𝒚 と等しい (conservation) 𝒉 ⊙ 𝜶$ 𝓡𝐀𝐁 𝓡𝐏𝐁 𝑝!" # 𝒚 𝑝#" # 𝒚
Feature Extractor 𝒙 input ⊙ 𝒉 Attention Branch Perception Branch
𝜶$ 提案⼿法1:ゲート構造を逆に通ると影響が重複 - 14 - 𝒉 ⊙ 𝜶$ 𝓡𝐀𝐁 𝓡𝐏𝐁 𝑝-. , 𝒚 , 𝑝/. , 𝒚 から計算したRelevanceをそれぞれ𝓡𝐀𝐁, 𝓡𝐏𝐁 𝓡 𝒉 = 𝓡𝐀𝐁 + 𝓡𝐏𝐁 𝓡 𝒉 のRelevanceの総和が𝑝-. , 𝒚 + 𝑝/. , 𝒚 と等しい (conservation) 𝑝!" # 𝒚 𝑝#" # 𝒚
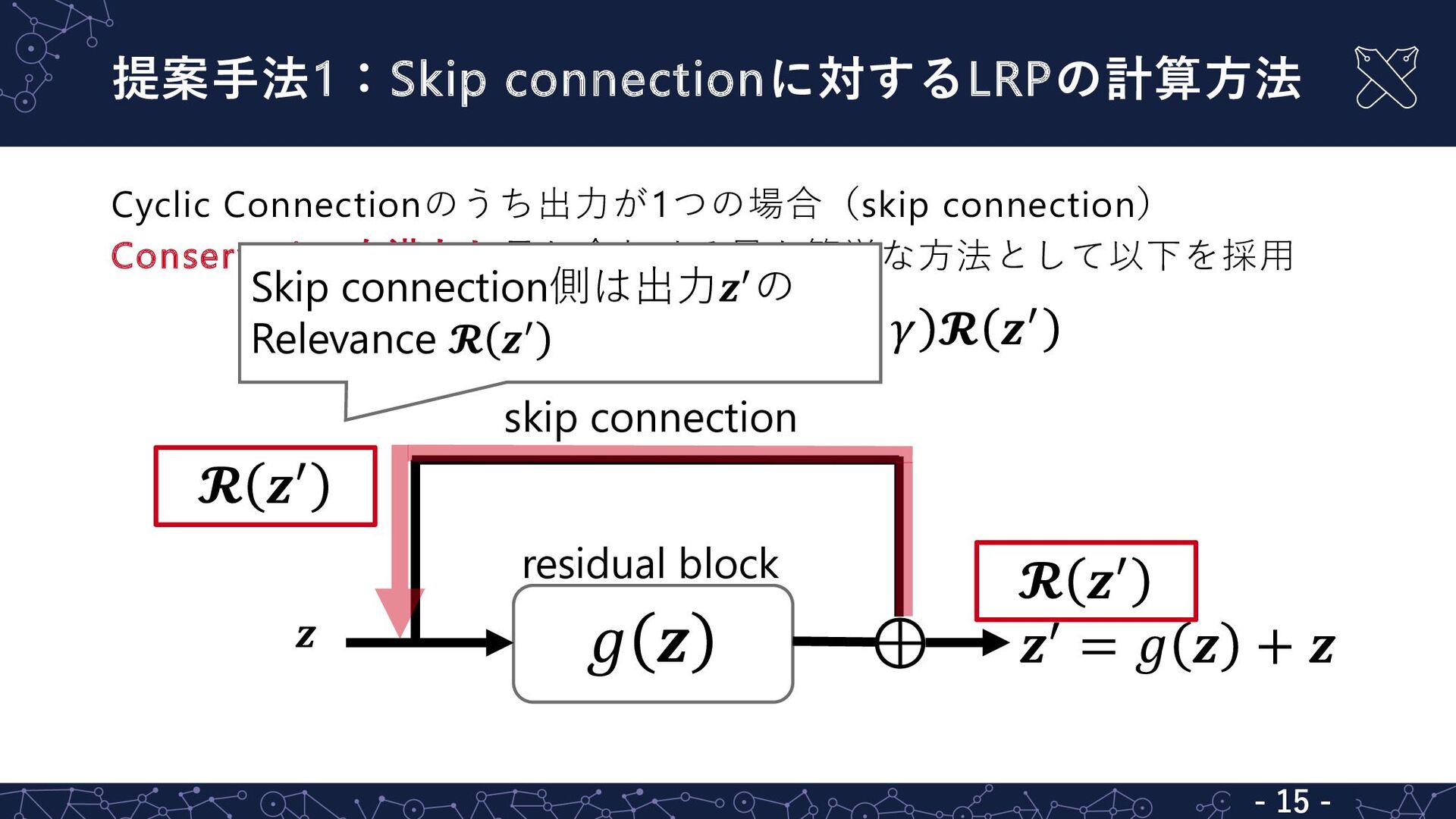
提案⼿法1:Skip connectionに対するLRPの計算⽅法 - 15 - Cyclic Connectionのうち出⼒が1つの場合(skip connection) Conservationを満たし⾜し合わせる最も簡単な⽅法として以下を採⽤ 𝓡
𝒛 = 𝛾𝓡⋆ 𝒛 + 1 − 𝛾 𝓡 𝒛% 𝒛 𝑔 𝒛 𝒛% = 𝑔 𝒛 + 𝒛 ⊕ skip connection 𝓡 𝒛% residual block 𝓡 𝒛% Skip connection側は出⼒𝒛$の Relevance 𝓡 𝒛$
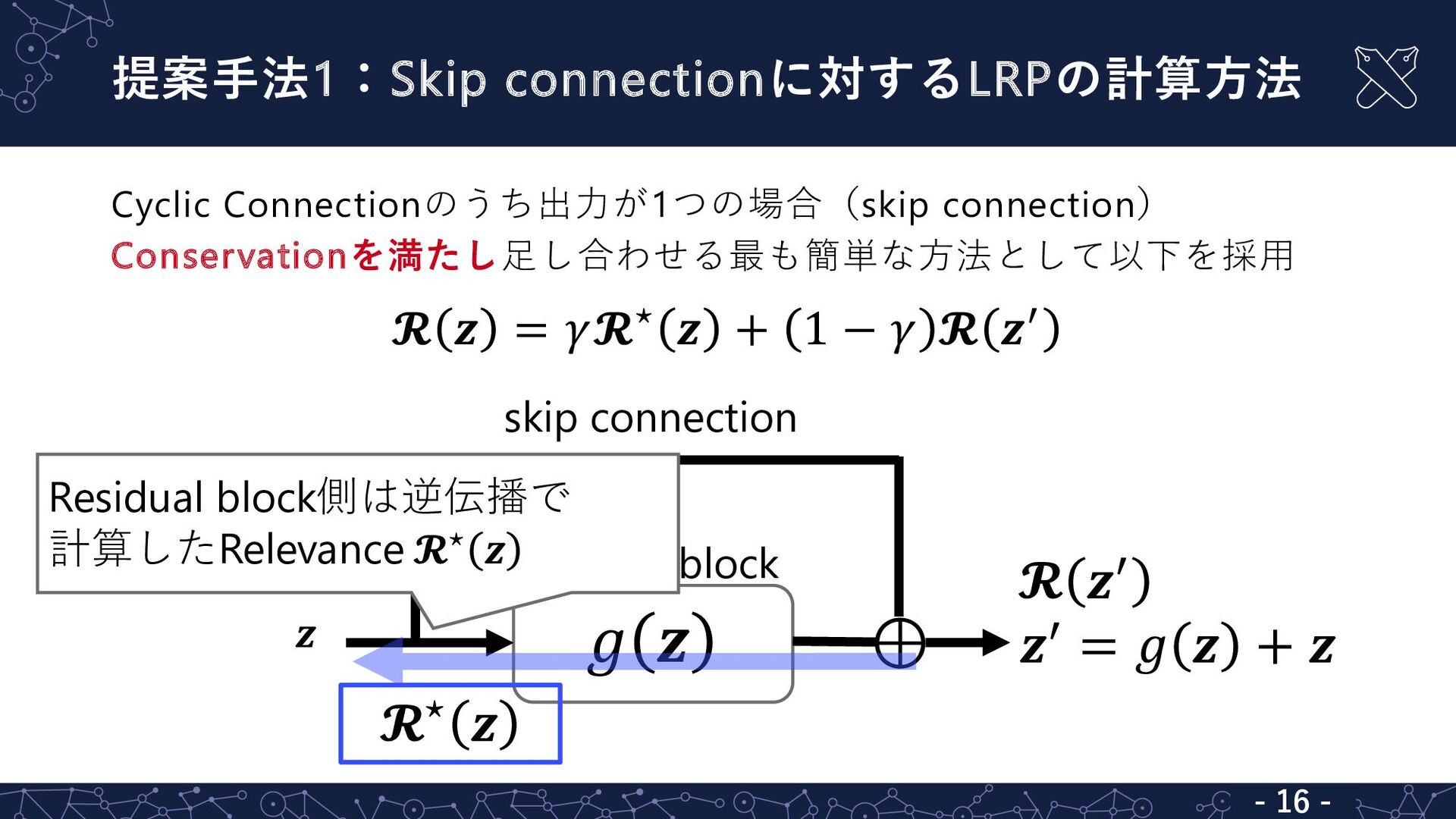
提案⼿法1:Skip connectionに対するLRPの計算⽅法 - 16 - Cyclic Connectionのうち出⼒が1つの場合(skip connection) Conservationを満たし⾜し合わせる最も簡単な⽅法として以下を採⽤ 𝓡
𝒛 = 𝛾𝓡⋆ 𝒛 + 1 − 𝛾 𝓡 𝒛% 𝒛 𝑔 𝒛 𝒛% = 𝑔 𝒛 + 𝒛 ⊕ skip connection 𝓡 𝒛% 𝓡⋆ 𝒛 residual block Residual block側は逆伝播で 計算したRelevance 𝓡⋆ 𝒛
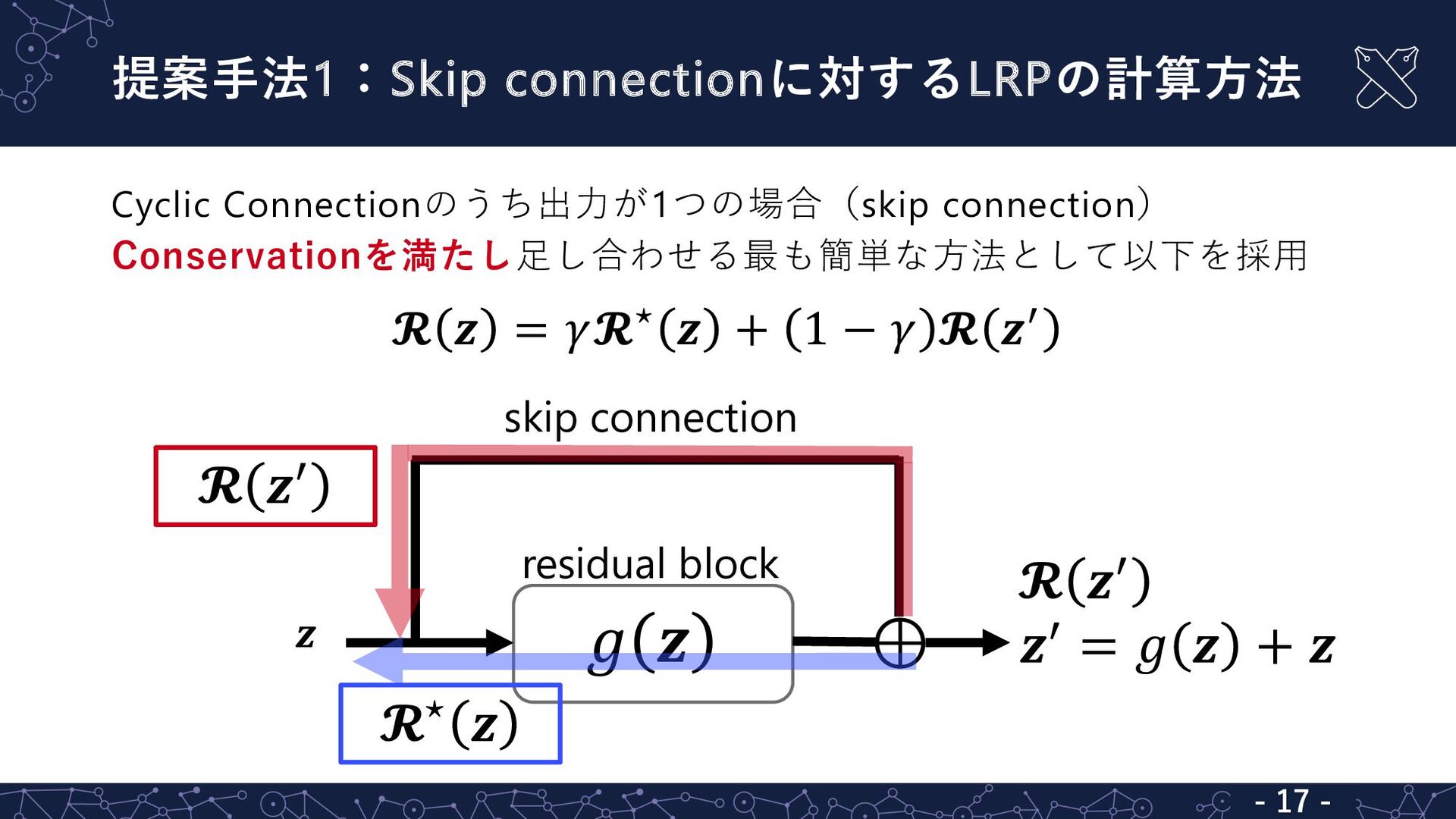
提案⼿法1:Skip connectionに対するLRPの計算⽅法 - 17 - Cyclic Connectionのうち出⼒が1つの場合(skip connection) Conservationを満たし⾜し合わせる最も簡単な⽅法として以下を採⽤ 𝓡
𝒛 = 𝛾𝓡⋆ 𝒛 + 1 − 𝛾 𝓡 𝒛% 𝒛 𝑔 𝒛 𝒛% = 𝑔 𝒛 + 𝒛 ⊕ skip connection 𝓡 𝒛% 𝓡⋆ 𝒛 𝓡 𝒛% residual block
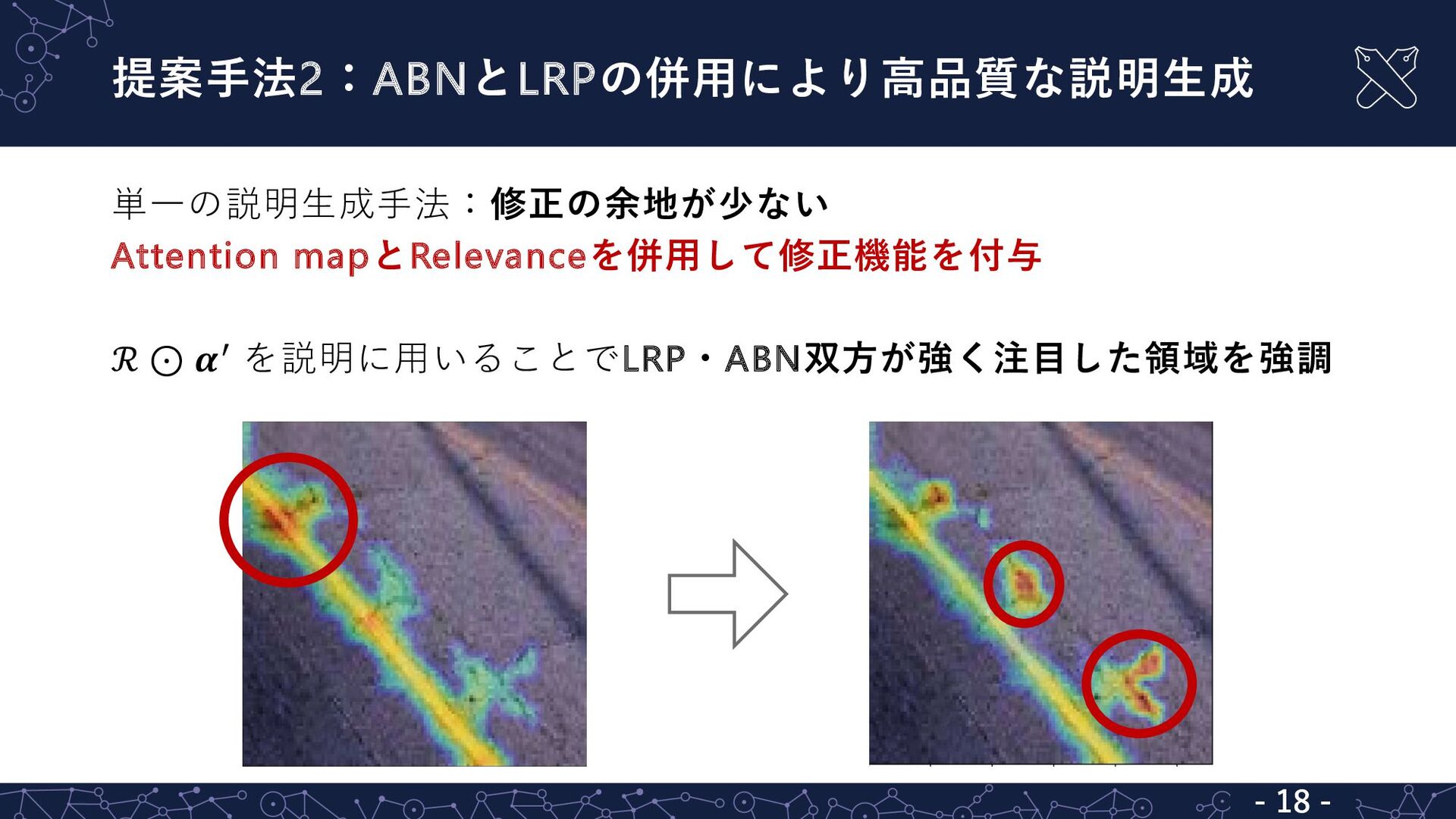
提案⼿法2:ABNとLRPの併⽤により⾼品質な説明⽣成 - 18 - 単⼀の説明⽣成⼿法:修正の余地が少ない Attention mapとRelevanceを併⽤して修正機能を付与 ℛ ⊙ 𝜶%
を説明に⽤いることでLRP・ABN双⽅が強く注⽬した領域を強調
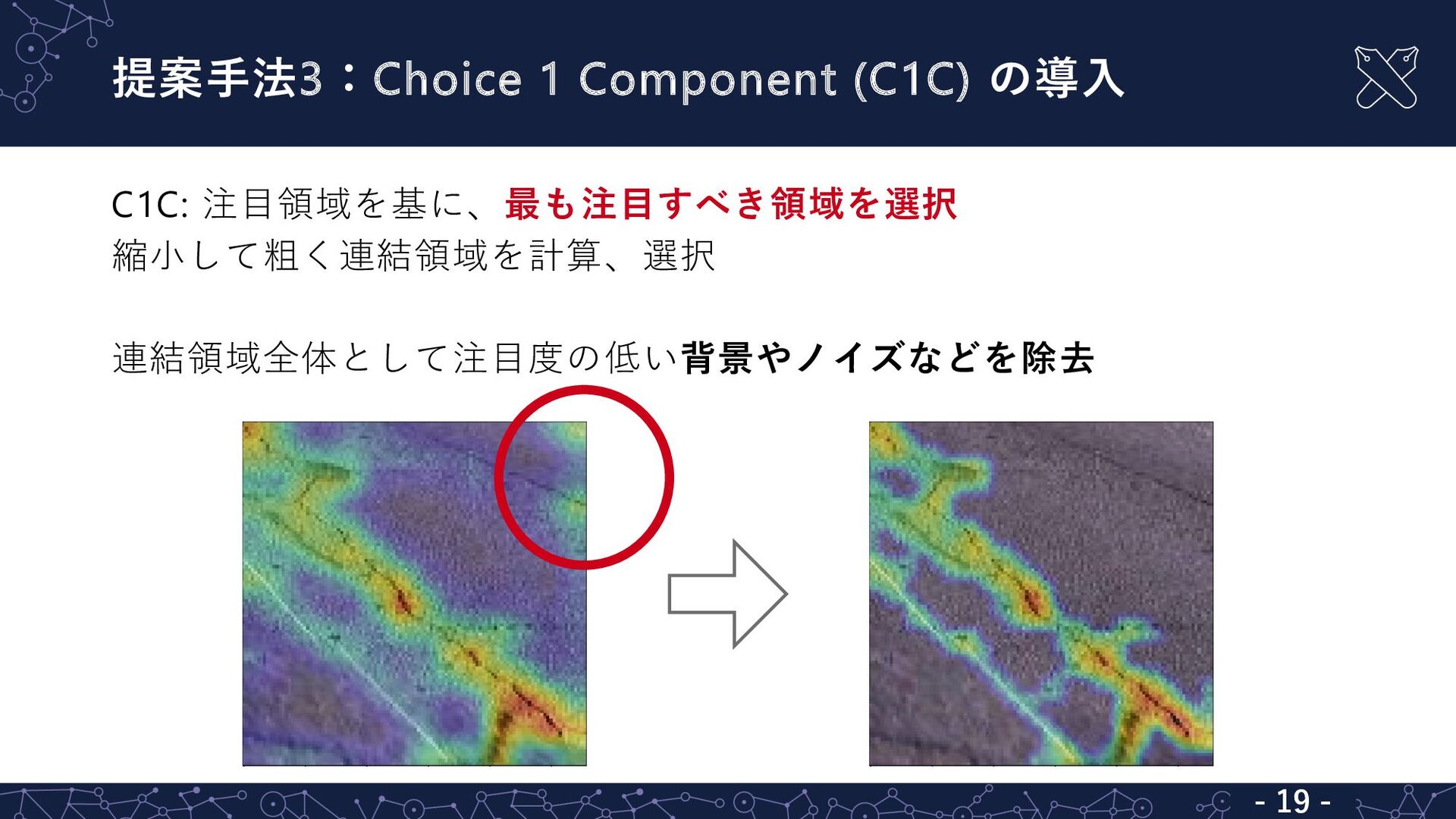
提案⼿法3:Choice 1 Component (C1C) の導⼊ - 19 - C1C: 注⽬領域を基に、最も注⽬すべき領域を選択
縮⼩して粗く連結領域を計算、選択 連結領域全体として注⽬度の低い背景やノイズなどを除去
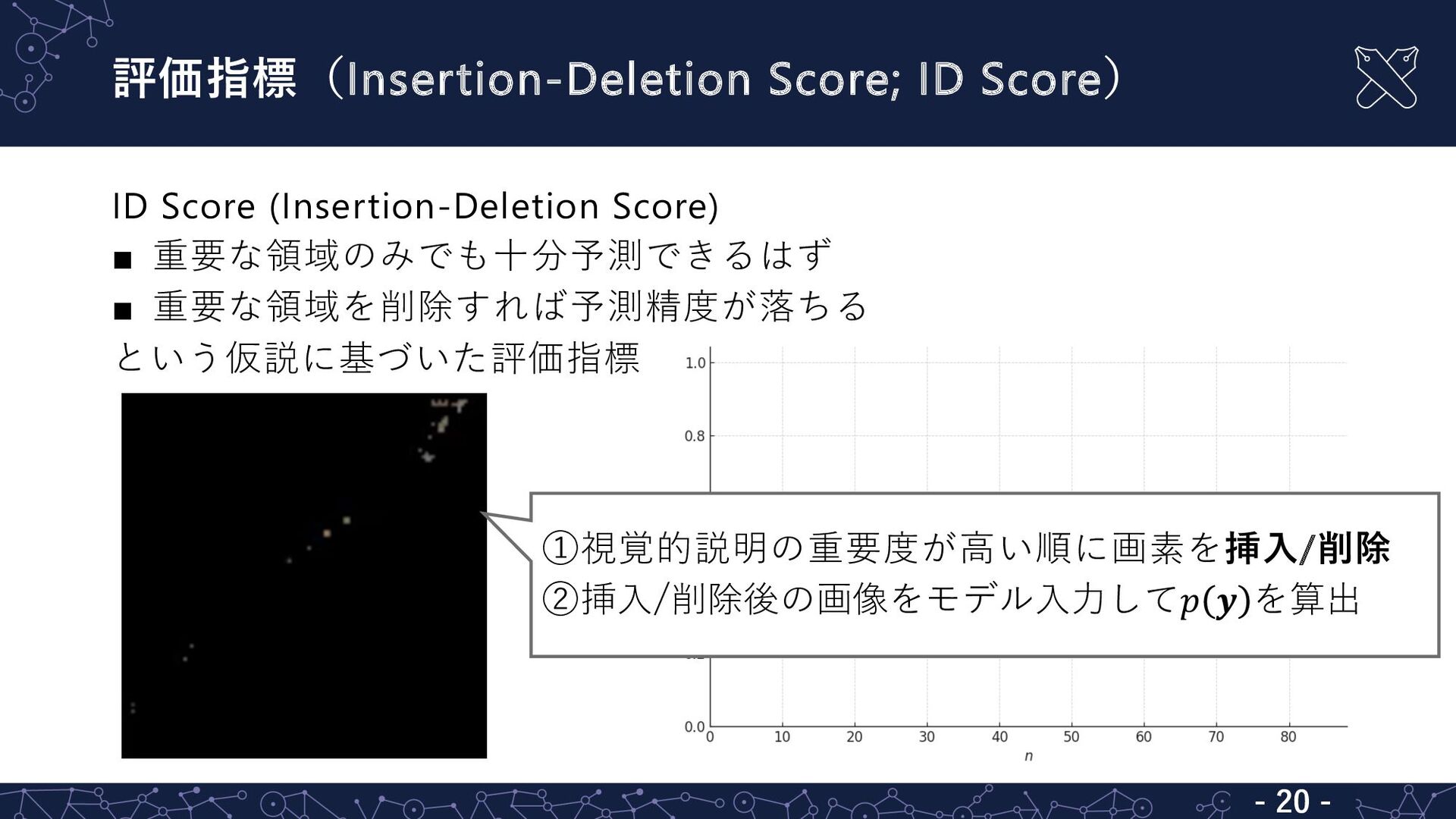
評価指標(Insertion-Deletion Score; ID Score) - 20 - ID Score (Insertion-Deletion
Score) ▪ 重要な領域のみでも⼗分予測できるはず ▪ 重要な領域を削除すれば予測精度が落ちる という仮説に基づいた評価指標 ①視覚的説明の重要度が⾼い順に画素を挿⼊/削除 ②挿⼊/削除後の画像をモデル⼊⼒して𝑝 𝒚 を算出
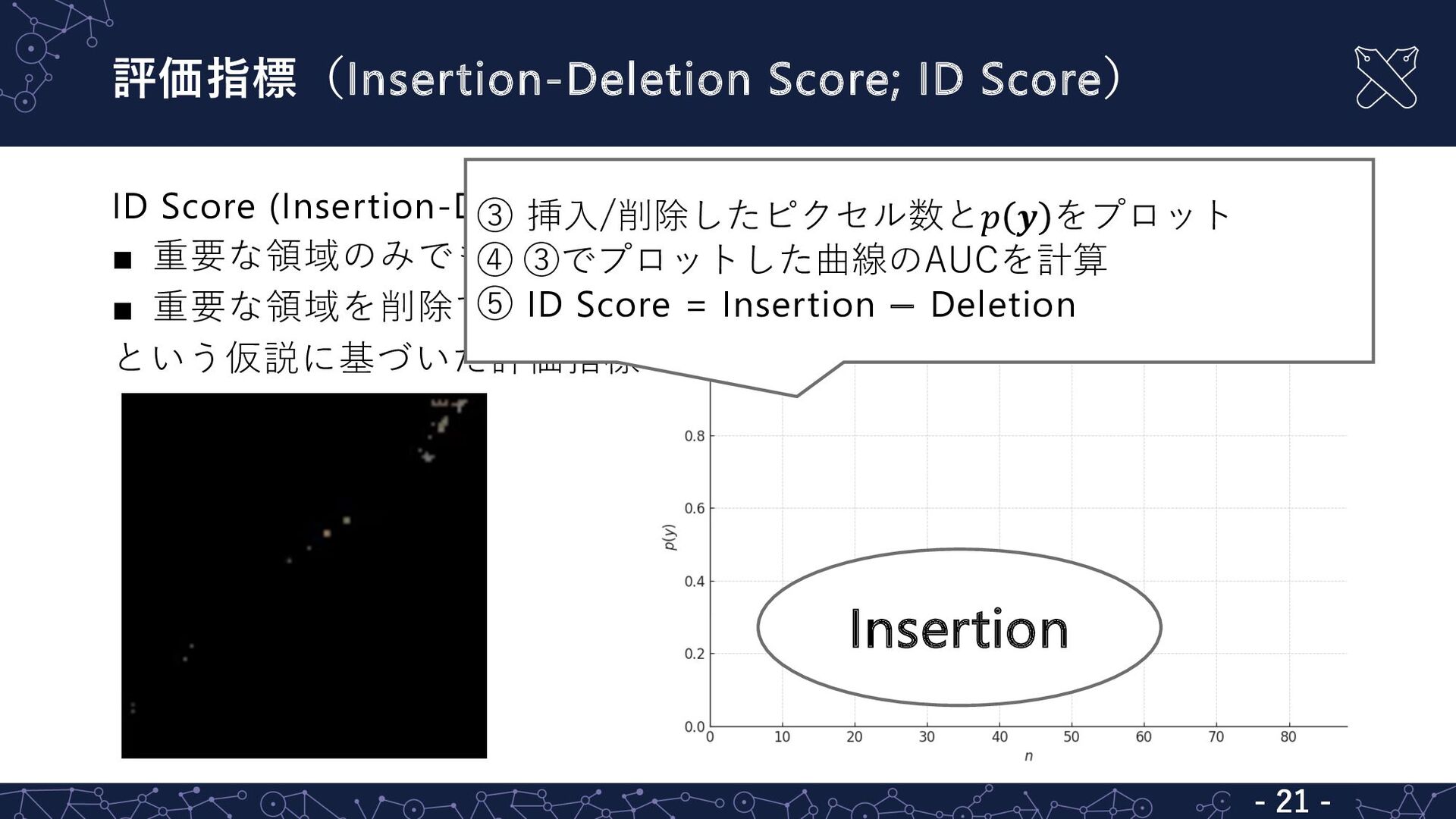
評価指標(Insertion-Deletion Score; ID Score) - 21 - ID Score (Insertion-Deletion
Score) ▪ 重要な領域のみでも⼗分予測できるはず ▪ 重要な領域を削除すれば予測精度が落ちる という仮説に基づいた評価指標 ③ 挿⼊/削除したピクセル数と𝑝 𝒚 をプロット ④ ③でプロットした曲線のAUCを計算 ⑤ ID Score = Insertion − Deletion Insertion
実験設定 - 22 - データセット RDD2022 Dataset (Road Damage Detection)
クラック有無判定⽤に矩形領域で切り抜き Train: 66,641 / Validation: 7,405 / Test: 3,897 応⽤:⾞やカーナビのサービス、道路インフラ整備 評価指標 Insertion / Deletion / ID Score / IoU https://crddc2022.sekilab.global/data/
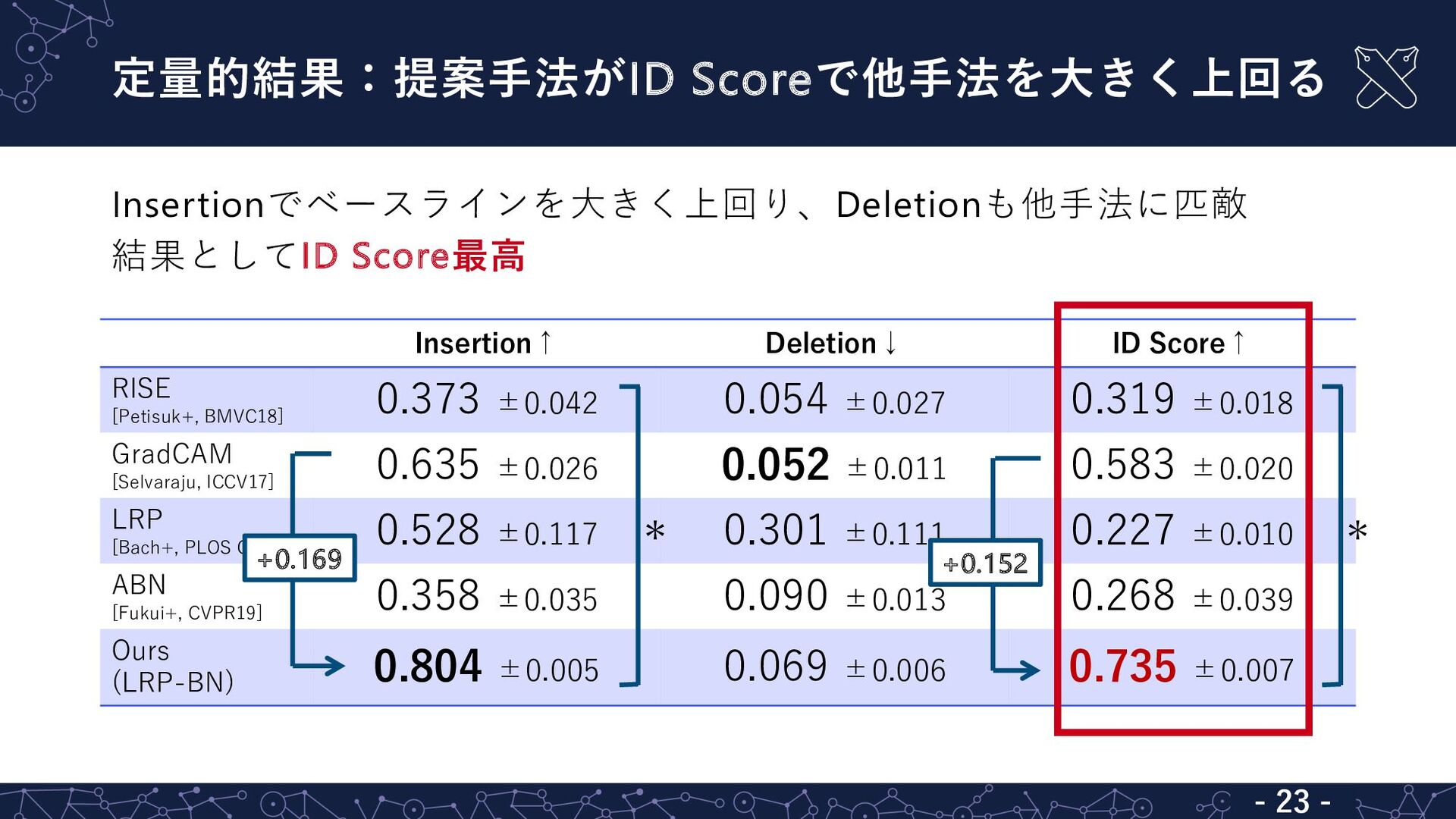
定量的結果:提案⼿法がID Scoreで他⼿法を⼤きく上回る - 23 - Insertionでベースラインを⼤きく上回り、Deletionも他⼿法に匹敵 結果としてID Score最⾼ Insertion↑ Deletion↓
ID Score↑ RISE [Petisuk+, BMVC18] 0.373 ±0.042 0.054 ±0.027 0.319 ±0.018 GradCAM [Selvaraju, ICCV17] 0.635 ±0.026 0.052 ±0.011 0.583 ±0.020 LRP [Bach+, PLOS ONE15] 0.528 ±0.117 0.301 ±0.111 0.227 ±0.010 ABN [Fukui+, CVPR19] 0.358 ±0.035 0.090 ±0.013 0.268 ±0.039 Ours (LRP-BN) 0.804 ±0.005 0.069 ±0.006 0.735 ±0.007 +0.169 +0.152 * *
定量的結果:最も⼈間に近いマスクを⽣成 - 24 - 被験者4⼈が作成した200サンプルのクラックマスクとのIoUを計測 ⼈間が作成したクラックマスクと最も近く、適切にクラック領域を注⽬ IoU↑ RISE [Petisuk+, BMVC18]
0.167 ±0.004 GradCAM [Selvaraju+, ICCV17] 0.141 ±0.002 LRP [Bach+, PLOS ONE15] 0.111 ±0.000 ABN [Fukui+, CVPR19] 0.113 ±0.107 Ours (LRP-BN) 0.184 ±0.004 +0.017
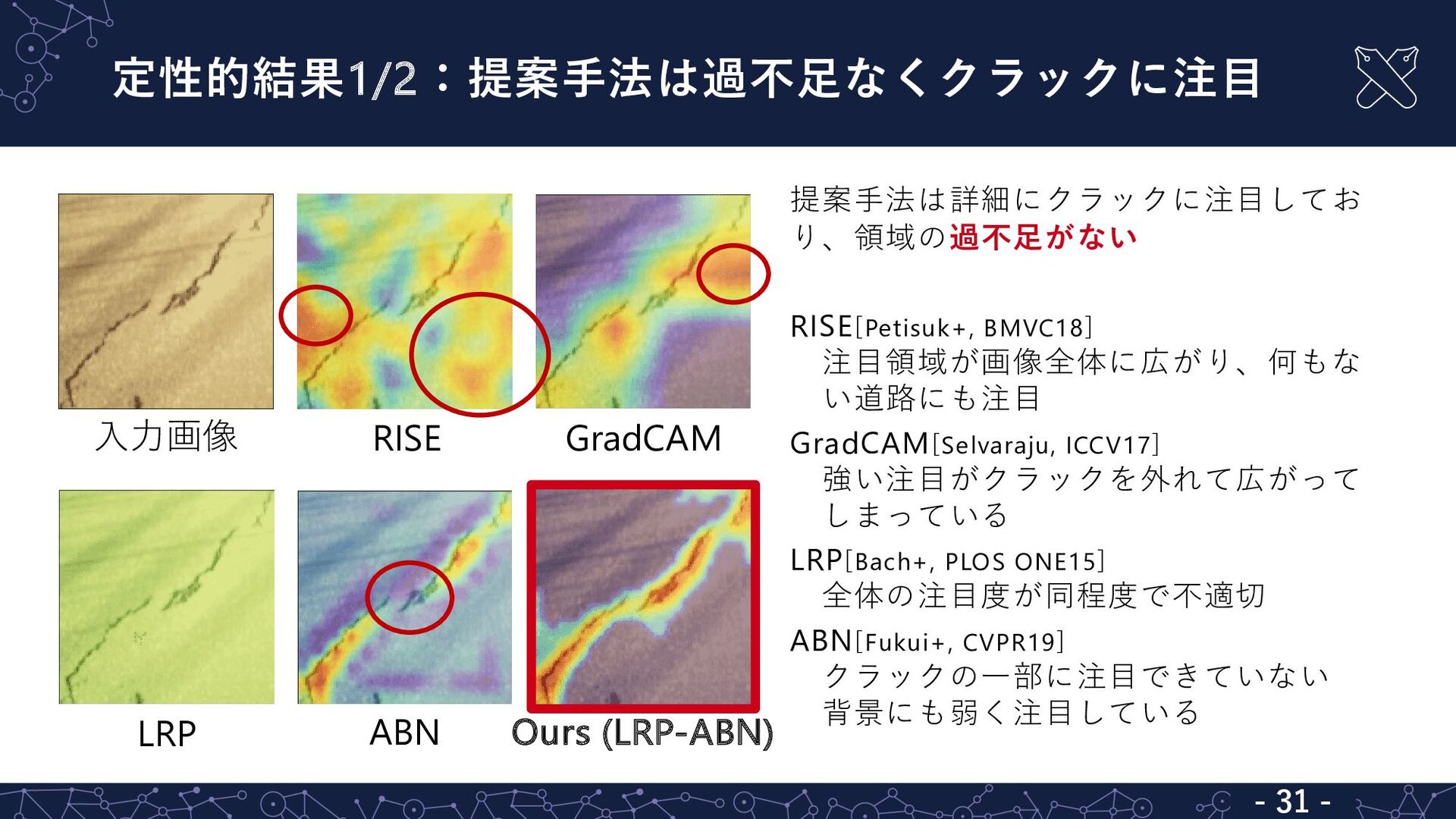
定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 25 - 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] 注⽬領域が画像全体に広がり、何もな い道路にも注⽬
GradCAM[Selvaraju, ICCV17] 強い注⽬がクラックを外れて広がって しまっている LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] クラックの⼀部に注⽬できていない 背景にも弱く注⽬している RISE LRP ABN Ours (LRP-ABN) GradCAM ⼊⼒画像
[Selvaraju+] 定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 26 - RISE LRP ABN Ours (LRP-ABN)
GradCAM ⼊⼒画像 [Petisuk+] [Fukui+] [Bach+] RISE 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] 注⽬領域が画像全体に広がり、何もな い道路にも注⽬ GradCAM[Selvaraju, ICCV17] 強い注⽬がクラックを外れて広がって しまっている LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] クラックの⼀部に注⽬できていない 背景にも弱く注⽬している
[Selvaraju+] 定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 27 - RISE LRP ABN Ours (LRP-ABN)
GradCAM ⼊⼒画像 [Petisuk+] [Fukui+] [Bach+] GradCAM 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] 注⽬領域が画像全体に広がり、何もな い道路にも注⽬ GradCAM[Selvaraju, ICCV17] 強い注⽬がクラックを外れて広がって しまっている LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] クラックの⼀部に注⽬できていない 背景にも弱く注⽬している
[Selvaraju+] 定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 28 - RISE LRP ABN Ours (LRP-ABN)
GradCAM ⼊⼒画像 [Petisuk+] [Fukui+] [Bach+] LRP 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] 注⽬領域が画像全体に広がり、何もな い道路にも注⽬ GradCAM[Selvaraju, ICCV17] 強い注⽬がクラックを外れて広がって しまっている LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] クラックの⼀部に注⽬できていない 背景にも弱く注⽬している
[Selvaraju+] 定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 29 - RISE LRP ABN Ours (LRP-ABN)
GradCAM ⼊⼒画像 [Petisuk+] [Fukui+] [Bach+] ABN 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] 注⽬領域が画像全体に広がり、何もな い道路にも注⽬ GradCAM[Selvaraju, ICCV17] 強い注⽬がクラックを外れて広がって しまっている LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] クラックの⼀部に注⽬できていない 背景にも弱く注⽬している
[Selvaraju+] 定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 30 - RISE LRP ABN Ours (LRP-ABN)
GradCAM ⼊⼒画像 [Petisuk+] [Fukui+] [Bach+] Ours 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] 注⽬領域が画像全体に広がり、何もな い道路にも注⽬ GradCAM[Selvaraju, ICCV17] 強い注⽬がクラックを外れて広がって しまっている LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] クラックの⼀部に注⽬できていない 背景にも弱く注⽬している
定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 31 - RISE LRP ABN Ours (LRP-ABN) GradCAM
⼊⼒画像 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] 注⽬領域が画像全体に広がり、何もな い道路にも注⽬ GradCAM[Selvaraju, ICCV17] 強い注⽬がクラックを外れて広がって しまっている LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] クラックの⼀部に注⽬できていない 背景にも弱く注⽬している
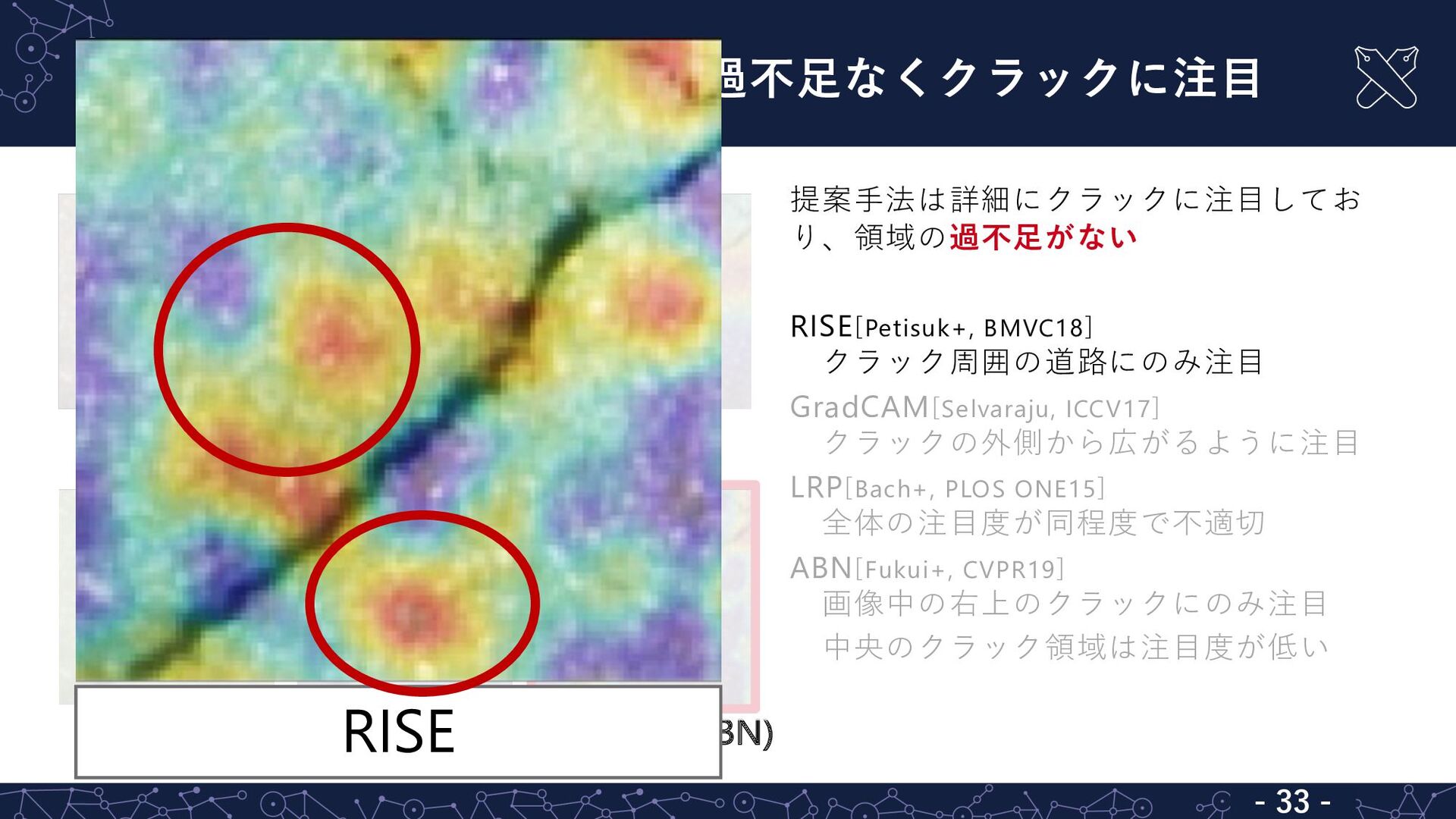
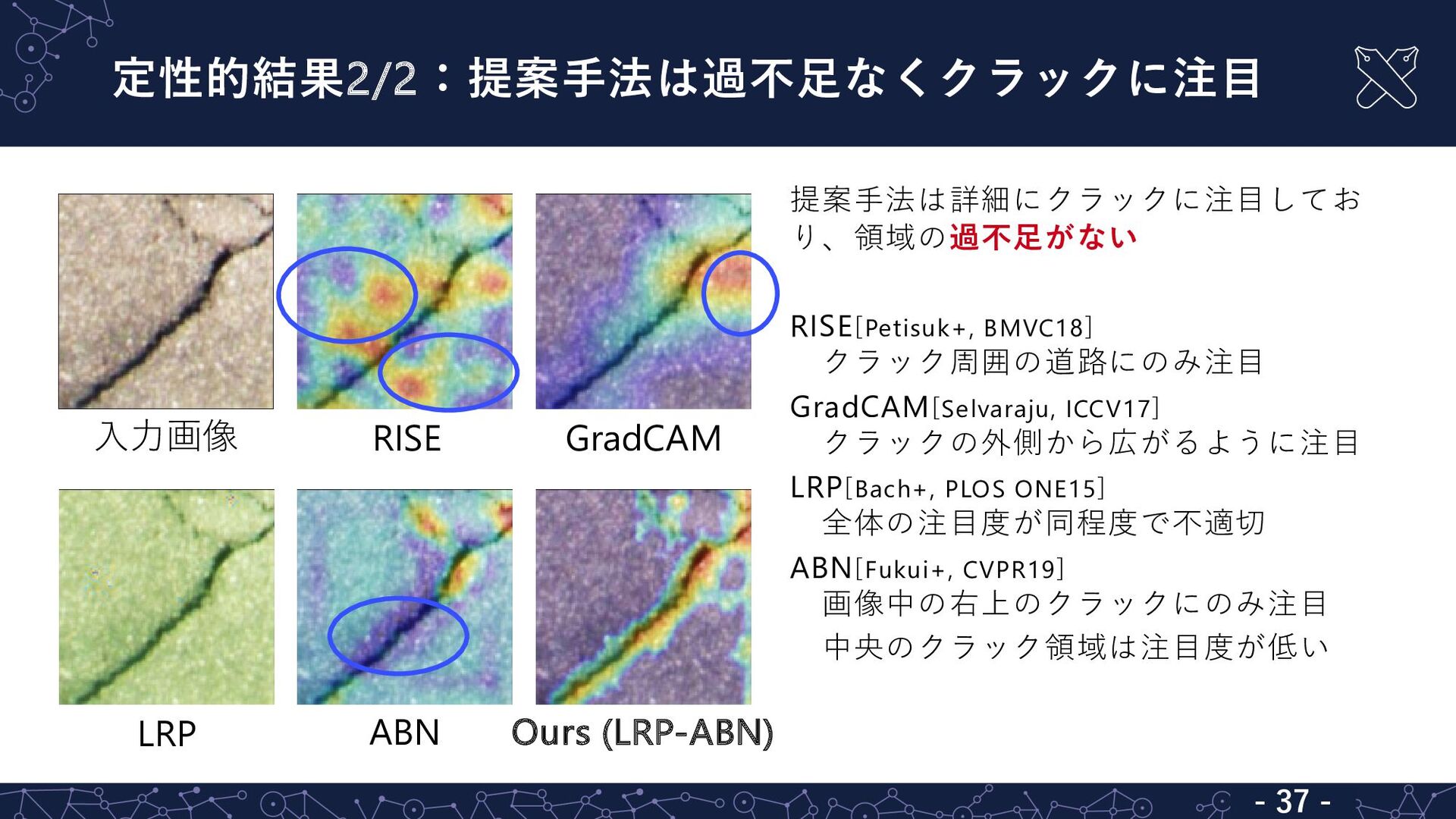
定性的結果2/2:提案⼿法は過不⾜なくクラックに注⽬ - 32 - 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] クラック周囲の道路にのみ注⽬ GradCAM[Selvaraju,
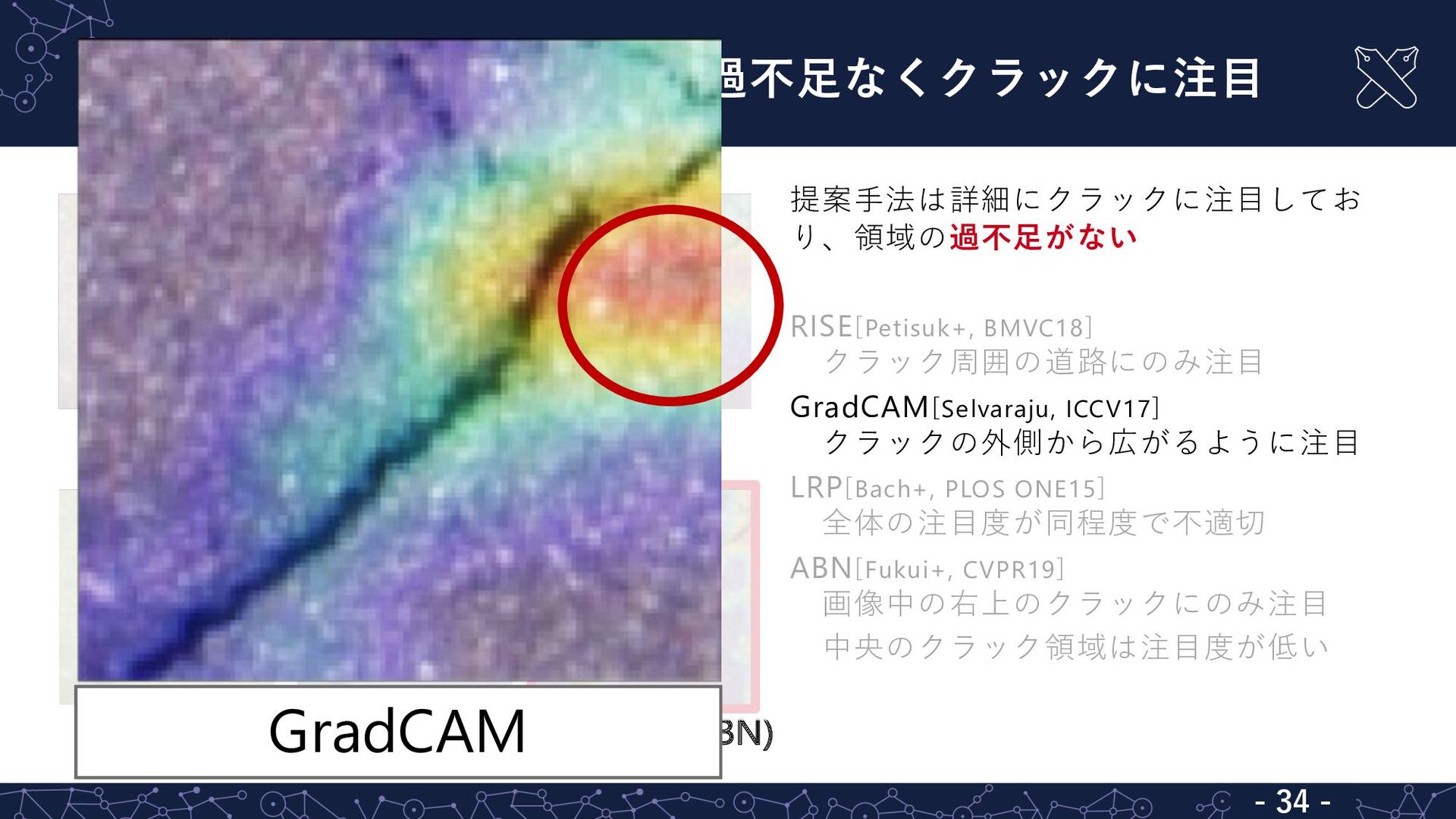
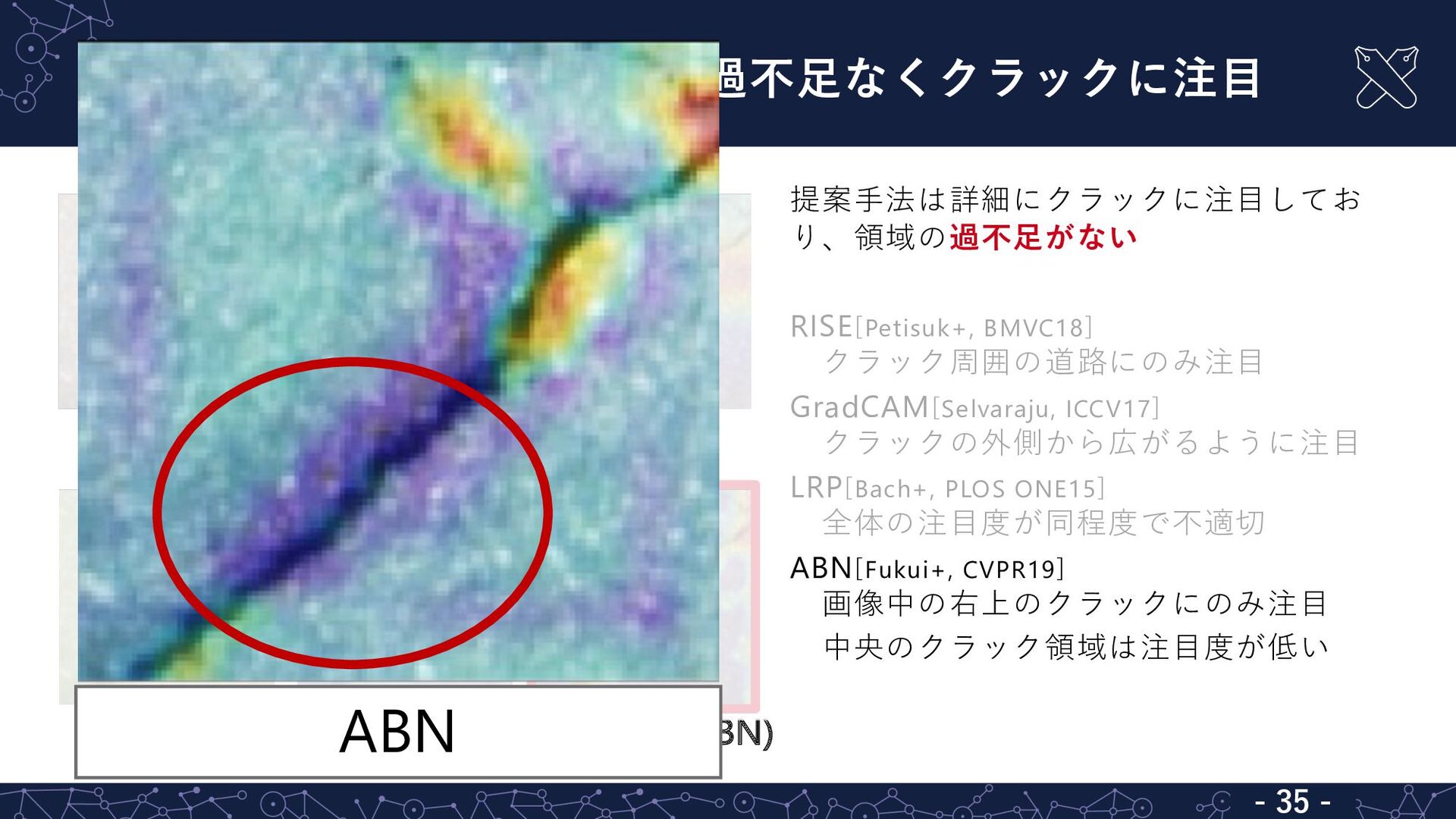
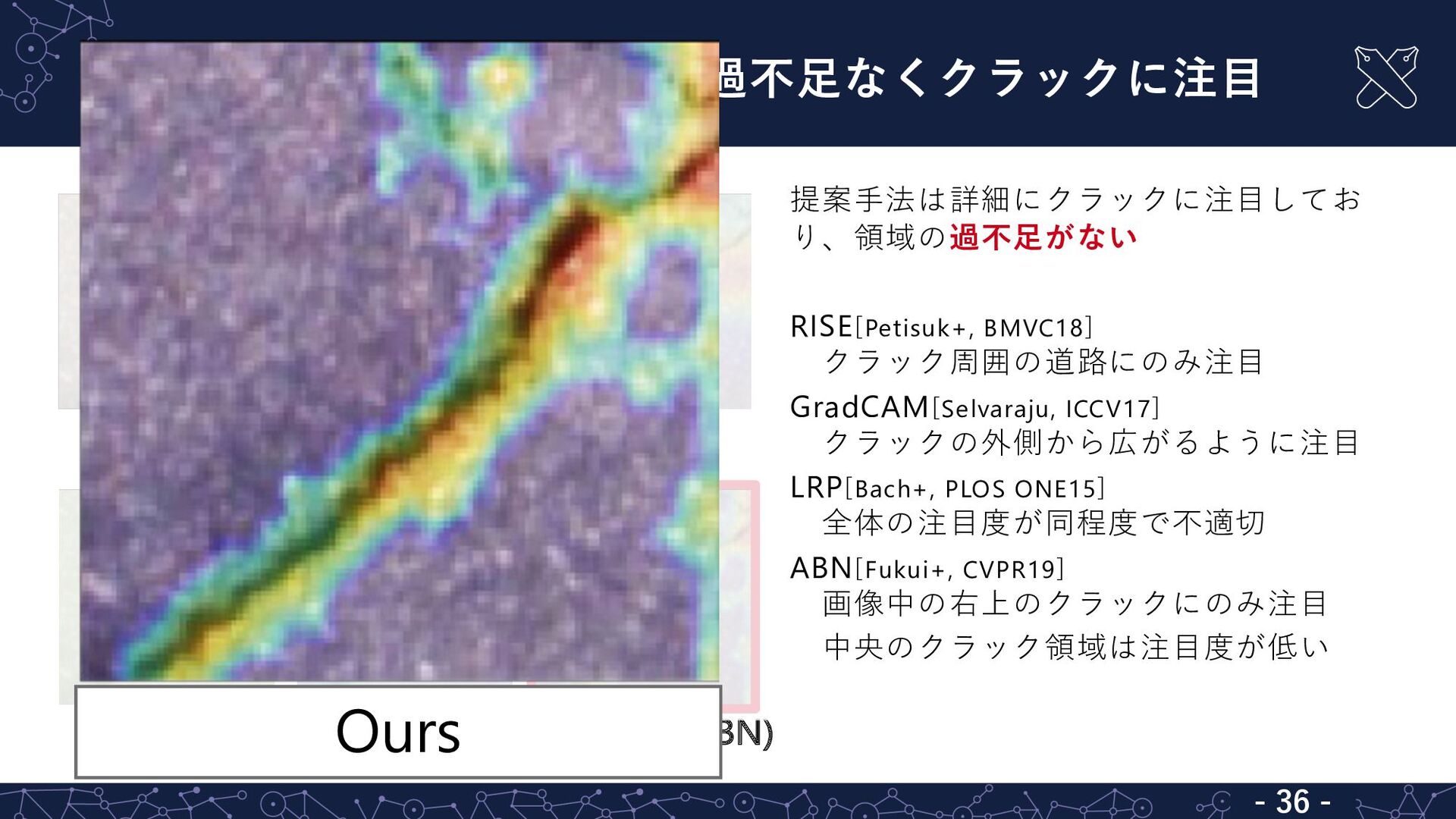
ICCV17] クラックの外側から広がるように注⽬ LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] 画像中の右上のクラックにのみ注⽬ 中央のクラック領域は注⽬度が低い RISE LRP ABN Ours (LRP-ABN) GradCAM ⼊⼒画像
定性的結果2/2:提案⼿法は過不⾜なくクラックに注⽬ - 33 - RISE LRP ABN Ours (LRP-ABN) GradCAM
⼊⼒画像 [Selvaraju+] [Petisuk+] [Fukui+] [Bach+] RISE 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] クラック周囲の道路にのみ注⽬ GradCAM[Selvaraju, ICCV17] クラックの外側から広がるように注⽬ LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] 画像中の右上のクラックにのみ注⽬ 中央のクラック領域は注⽬度が低い
定性的結果2/2:提案⼿法は過不⾜なくクラックに注⽬ - 34 - RISE LRP ABN Ours (LRP-ABN) GradCAM
⼊⼒画像 [Selvaraju+] [Petisuk+] [Fukui+] [Bach+] GradCAM 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] クラック周囲の道路にのみ注⽬ GradCAM[Selvaraju, ICCV17] クラックの外側から広がるように注⽬ LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] 画像中の右上のクラックにのみ注⽬ 中央のクラック領域は注⽬度が低い
定性的結果2/2:提案⼿法は過不⾜なくクラックに注⽬ - 35 - RISE LRP ABN Ours (LRP-ABN) GradCAM
⼊⼒画像 [Selvaraju+] [Petisuk+] [Fukui+] [Bach+] ABN 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] クラック周囲の道路にのみ注⽬ GradCAM[Selvaraju, ICCV17] クラックの外側から広がるように注⽬ LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] 画像中の右上のクラックにのみ注⽬ 中央のクラック領域は注⽬度が低い
定性的結果2/2:提案⼿法は過不⾜なくクラックに注⽬ - 36 - RISE LRP ABN Ours (LRP-ABN) GradCAM
⼊⼒画像 [Selvaraju+] [Petisuk+] [Fukui+] [Bach+] Ours 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] クラック周囲の道路にのみ注⽬ GradCAM[Selvaraju, ICCV17] クラックの外側から広がるように注⽬ LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] 画像中の右上のクラックにのみ注⽬ 中央のクラック領域は注⽬度が低い
定性的結果2/2:提案⼿法は過不⾜なくクラックに注⽬ - 37 - RISE LRP ABN Ours (LRP-ABN) GradCAM
⼊⼒画像 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] クラック周囲の道路にのみ注⽬ GradCAM[Selvaraju, ICCV17] クラックの外側から広がるように注⽬ LRP[Bach+, PLOS ONE15] 全体の注⽬度が同程度で不適切 ABN[Fukui+, CVPR19] 画像中の右上のクラックにのみ注⽬ 中央のクラック領域は注⽬度が低い
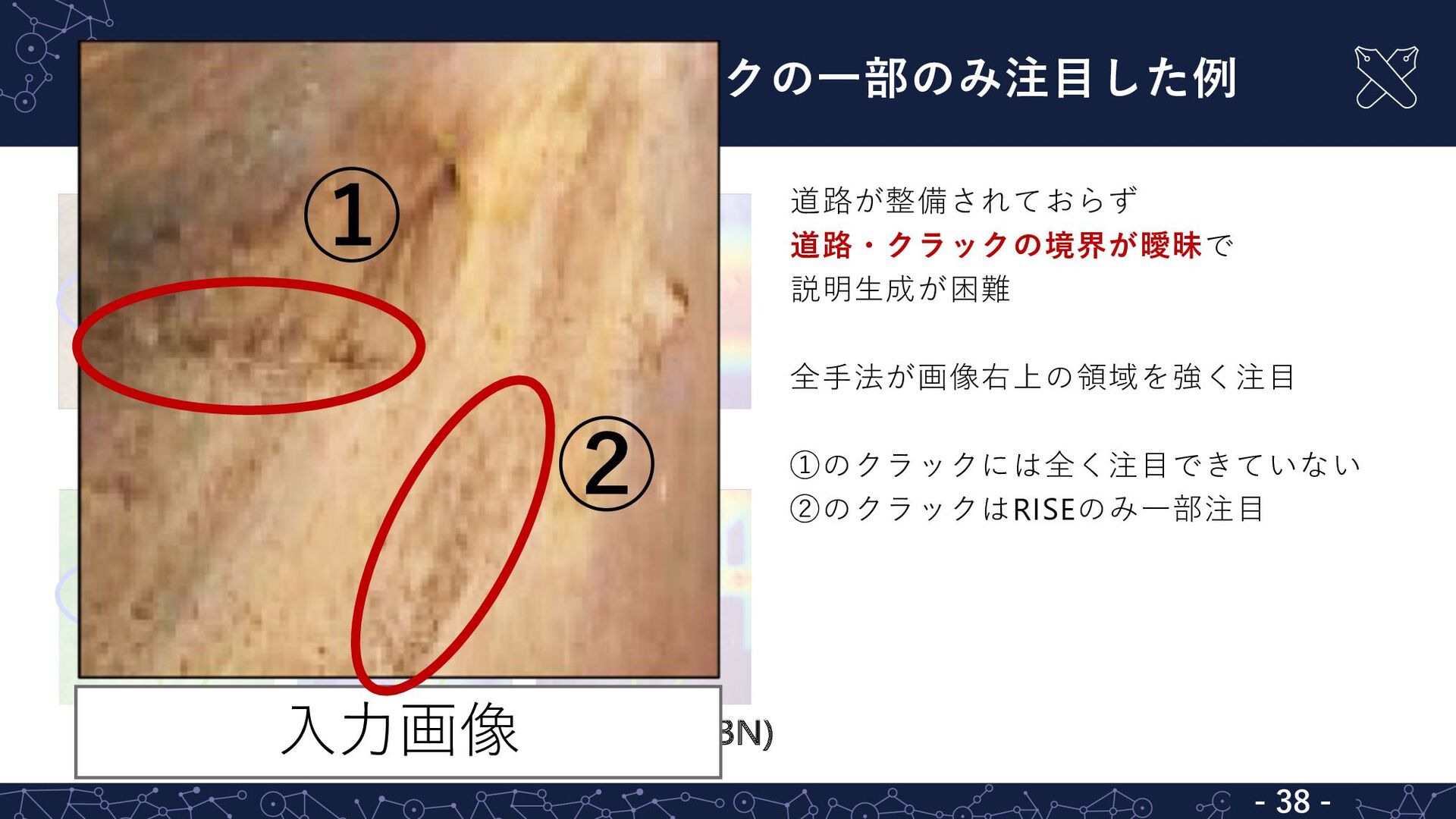
定性的結果・失敗例:クラックの⼀部のみ注⽬した例 - 38 - 道路が整備されておらず 道路・クラックの境界が曖昧で 説明⽣成が困難 全⼿法が画像右上の領域を強く注⽬ ①のクラックには全く注⽬できていない ②のクラックはRISEのみ⼀部注⽬
RISE LRP ABN Ours (LRP-ABN) GradCAM ⼊⼒画像 [Selvaraju+] [Petisuk+] [Fukui+] [Bach+] ⼊⼒画像 ① ②
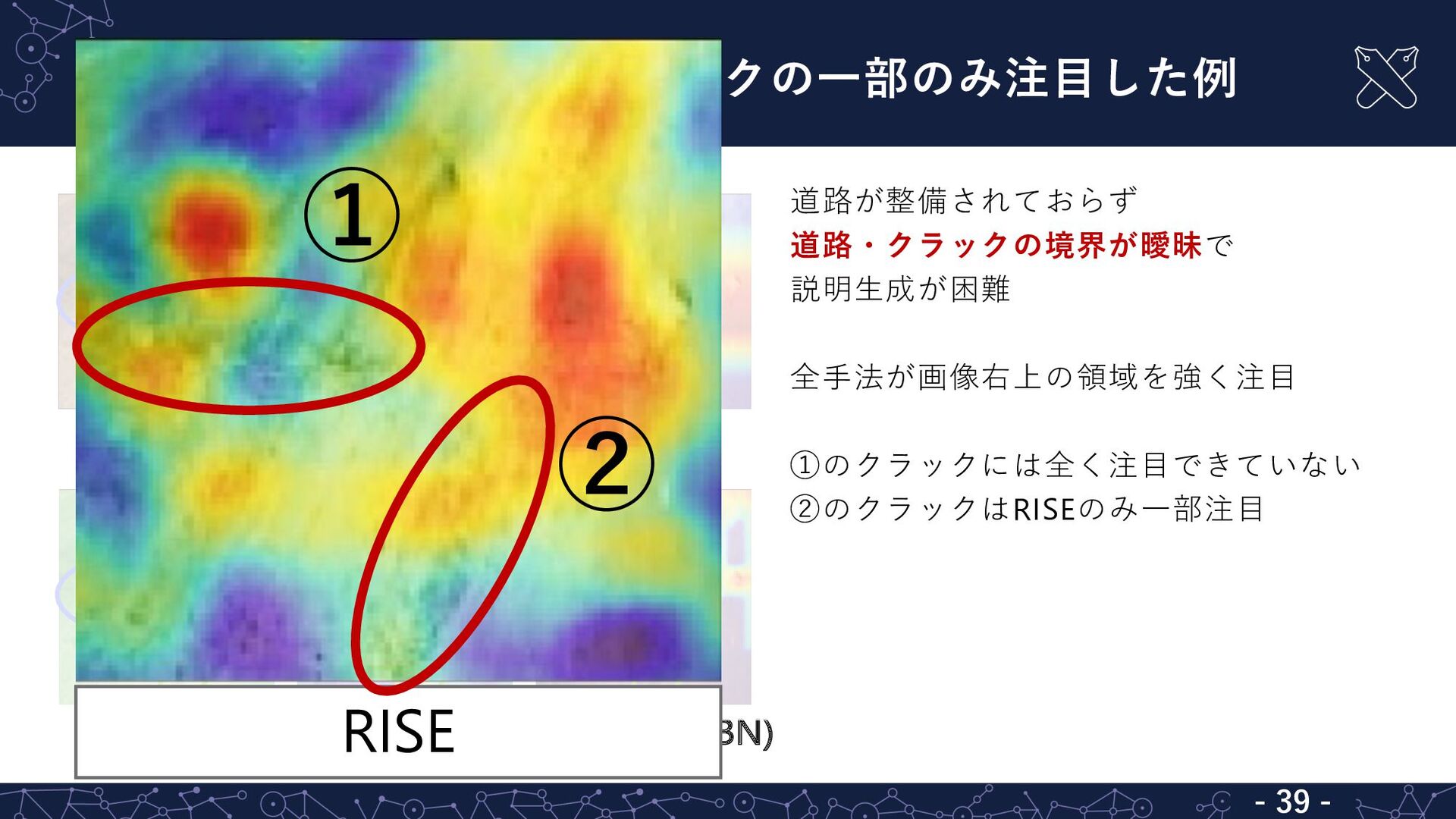
定性的結果・失敗例:クラックの⼀部のみ注⽬した例 - 39 - RISE LRP ABN Ours (LRP-ABN) GradCAM
⼊⼒画像 [Selvaraju+] [Petisuk+] [Fukui+] [Bach+] RISE ① ② 道路が整備されておらず 道路・クラックの境界が曖昧で 説明⽣成が困難 全⼿法が画像右上の領域を強く注⽬ ①のクラックには全く注⽬できていない ②のクラックはRISEのみ⼀部注⽬
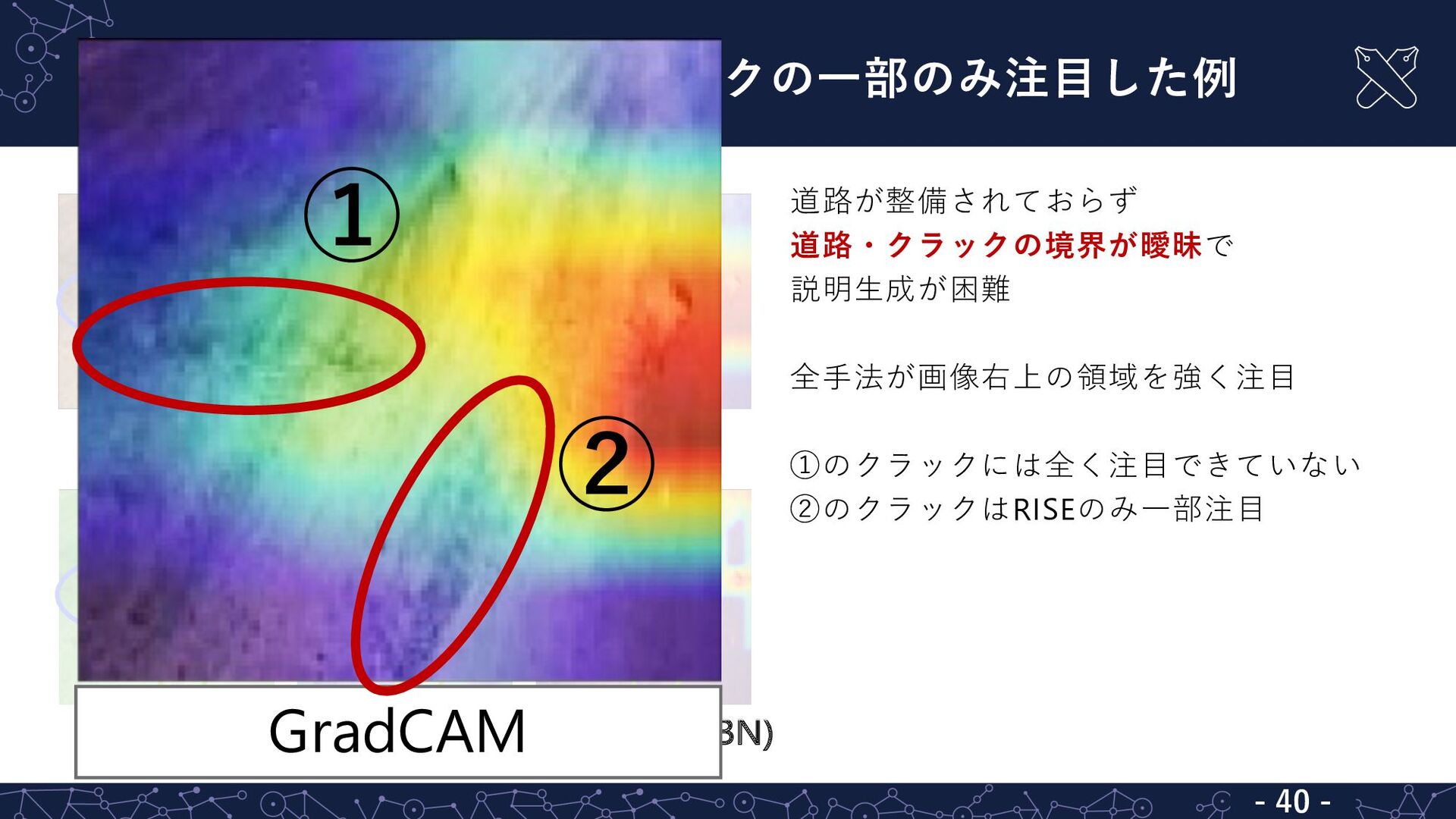
定性的結果・失敗例:クラックの⼀部のみ注⽬した例 - 40 - RISE LRP ABN Ours (LRP-ABN) GradCAM
⼊⼒画像 [Selvaraju+] [Petisuk+] [Fukui+] [Bach+] GradCAM ① ② 道路が整備されておらず 道路・クラックの境界が曖昧で 説明⽣成が困難 全⼿法が画像右上の領域を強く注⽬ ①のクラックには全く注⽬できていない ②のクラックはRISEのみ⼀部注⽬
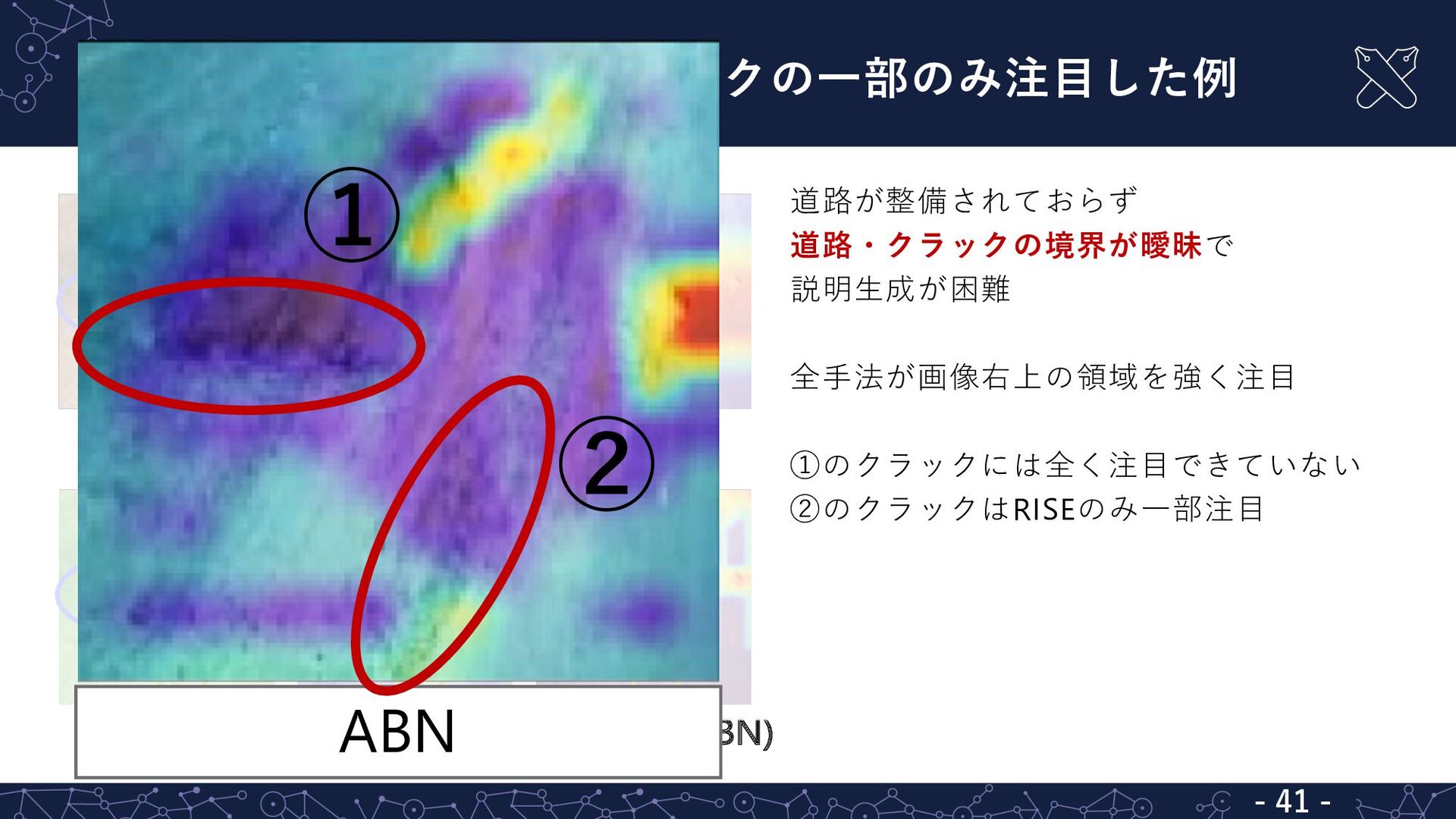
定性的結果・失敗例:クラックの⼀部のみ注⽬した例 - 41 - RISE LRP ABN Ours (LRP-ABN) GradCAM
⼊⼒画像 [Selvaraju+] [Petisuk+] [Fukui+] [Bach+] ABN ① ② 道路が整備されておらず 道路・クラックの境界が曖昧で 説明⽣成が困難 全⼿法が画像右上の領域を強く注⽬ ①のクラックには全く注⽬できていない ②のクラックはRISEのみ⼀部注⽬
定性的結果・失敗例:クラックの⼀部のみ注⽬した例 - 42 - RISE LRP ABN Ours (LRP-ABN) GradCAM
⼊⼒画像 [Selvaraju+] [Petisuk+] [Fukui+] [Bach+] Ours ① ② 道路が整備されておらず 道路・クラックの境界が曖昧で 説明⽣成が困難 全⼿法が画像右上の領域を強く注⽬ ①のクラックには全く注⽬できていない ②のクラックはRISEのみ⼀部注⽬
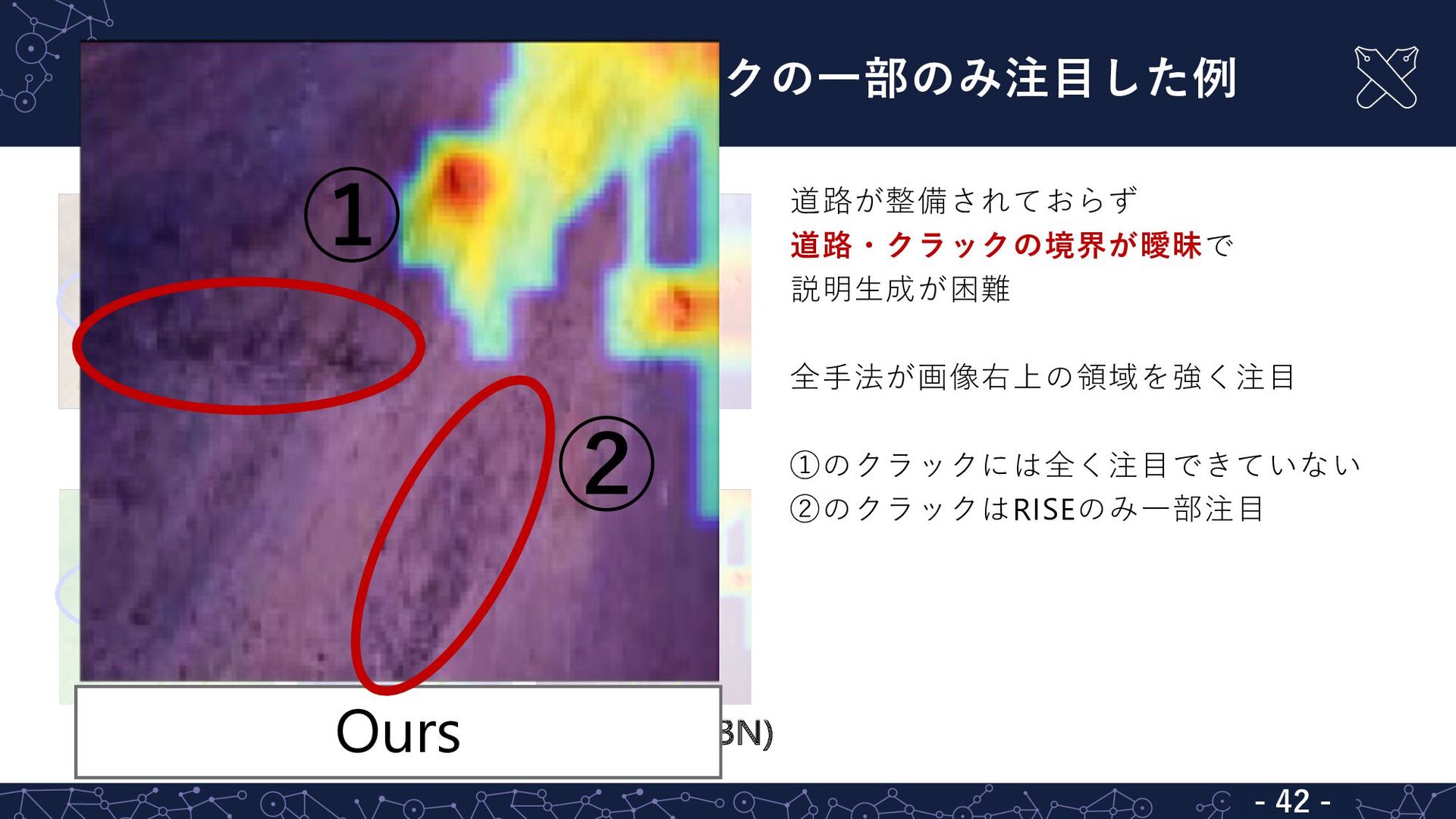
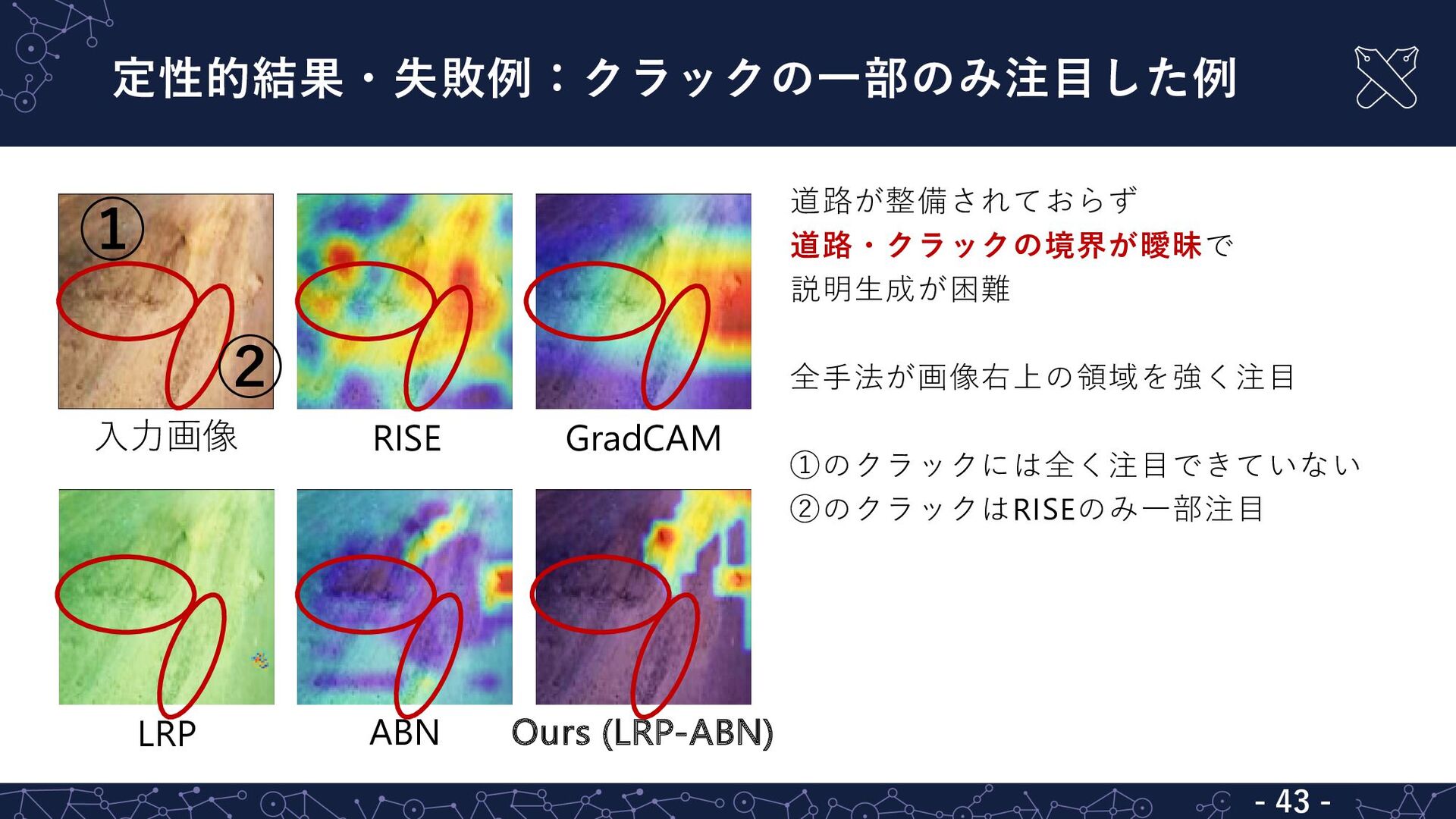
定性的結果・失敗例:クラックの⼀部のみ注⽬した例 - 43 - 道路が整備されておらず 道路・クラックの境界が曖昧で 説明⽣成が困難 全⼿法が画像右上の領域を強く注⽬ ①のクラックには全く注⽬できていない ②のクラックはRISEのみ⼀部注⽬
RISE LRP ABN Ours (LRP-ABN) GradCAM ⼊⼒画像 ① ②
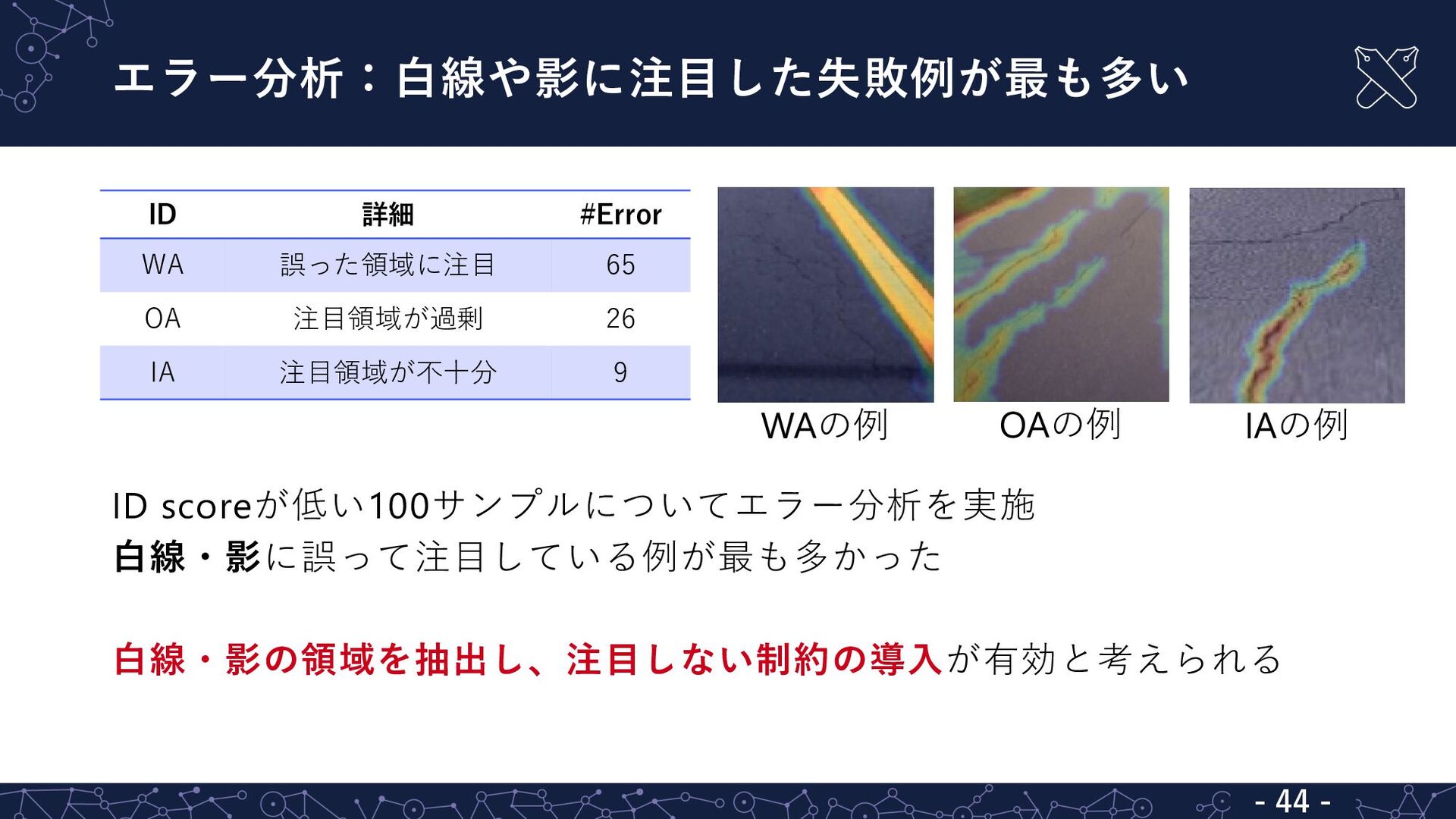
エラー分析:⽩線や影に注⽬した失敗例が最も多い - 44 - ID scoreが低い100サンプルについてエラー分析を実施 ⽩線・影に誤って注⽬している例が最も多かった ⽩線・影の領域を抽出し、注⽬しない制約の導⼊が有効と考えられる ID 詳細
#Error WA 誤った領域に注⽬ 65 OA 注⽬領域が過剰 26 IA 注⽬領域が不⼗分 9 WAの例 OAの例 IAの例
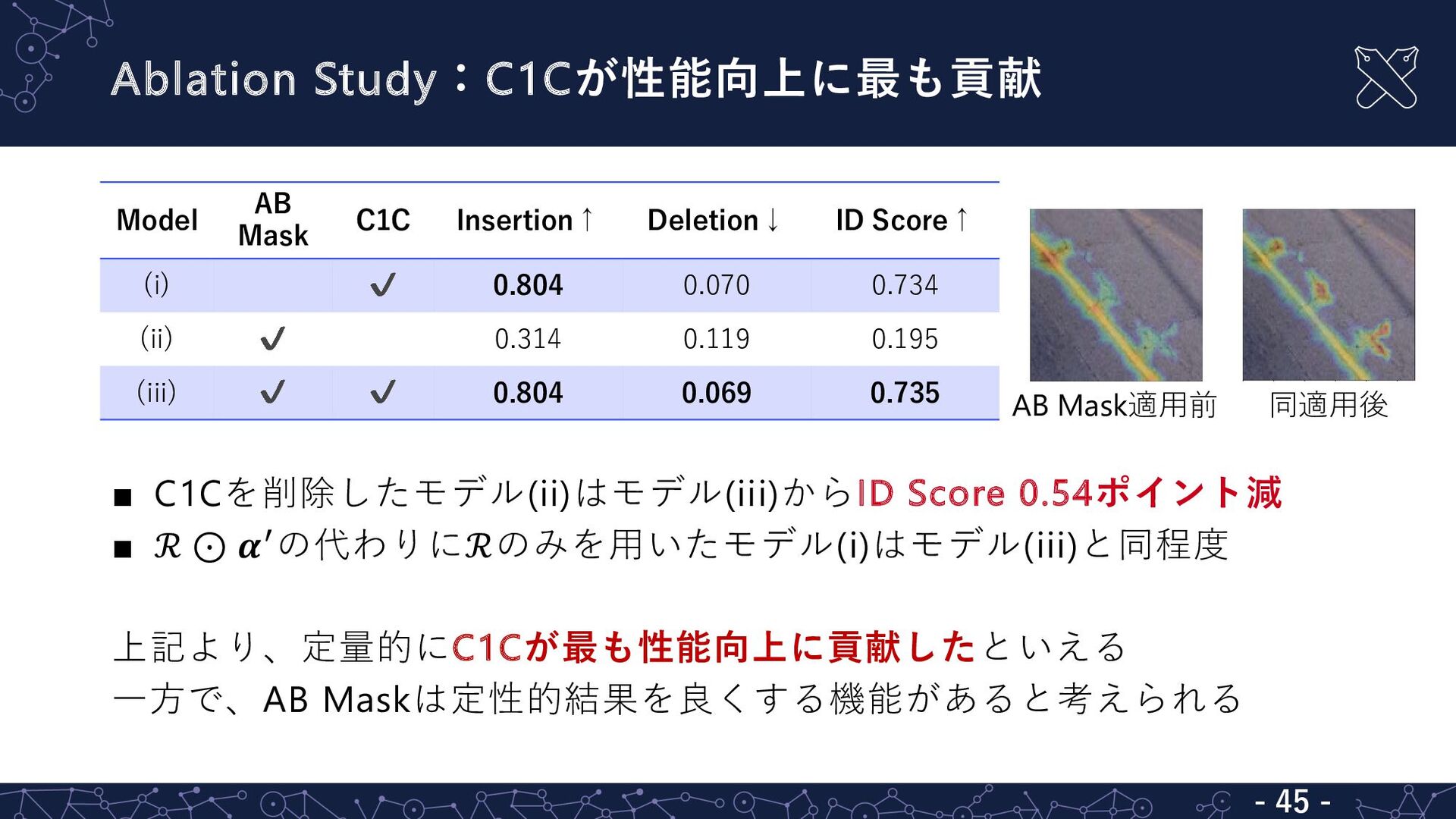
Ablation Study:C1Cが性能向上に最も貢献 - 45 - ▪ C1Cを削除したモデル(ii)はモデル(iii)からID Score 0.54ポイント減 ▪
ℛ ⊙ 𝜶%の代わりにℛのみを⽤いたモデル(i)はモデル(iii)と同程度 上記より、定量的にC1Cが最も性能向上に貢献したといえる ⼀⽅で、AB Maskは定性的結果を良くする機能があると考えられる Model AB Mask C1C Insertion↑ Deletion↓ ID Score↑ (i) ✔ 0.804 0.070 0.734 (ii) ✔ 0.314 0.119 0.195 (iii) ✔ ✔ 0.804 0.069 0.735 AB Mask適⽤前 同適⽤後
まとめ・今後の実験 - 46 - 背景 深層学習モデルの説明性向上は汎化性能につながり重要 提案⼿法 Cyclic connectionに対するLRPの計算⽅法の提案 ABNにLRPを導⼊し、視覚的説明を組み合わせたLRP-BN
結果 提案⼿法が過不⾜なくクラックに注⽬した説明を⽣成し、 ID Scoreで他⼿法を⼤きく上回る
{kind=link}
![背景:深層学習モデルの説明性向上は汎化性能につながり重要 - 1 - 深層学習モデルの説明性は重要 ▪ 説明責任の強化(医療・⾦融など) ▪ 未解明な理論の解明(太陽フレア[Iida+, ACCV22]など)](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_1.jpg){kind=link}
![背景:深層学習モデルの説明性向上は汎化性能につながり重要 - 2 - 深層学習モデルの説明性は重要 ▪ 説明責任の強化(医療・⾦融など) ▪ 未解明な理論の解明(太陽フレア[Iida+, ACCV22]など)](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_2.jpg){kind=link}
![背景:深層学習モデルの説明性向上は汎化性能につながり重要 - 3 - 深層学習モデルの説明性は重要 ▪ 説明責任の強化(医療・⾦融など) ▪ 未解明な理論の解明(太陽フレア[Iida+, ACCV22]など)](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_3.jpg){kind=link}
{kind=link}
![関連研究: Attention Branch Network (ABN) [Fukui+, CVPR19] - 5 -](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
![XAI for Transformers [Ali+, ICML22] 保全性を満たすようにLRPをTransformer / LayerNormへ適⽤ [Chefer+, CVPR21]](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_8.jpg){kind=link}
![XAI for Transformers [Ali+, ICML22] 保全性を満たすようにLRPをTransformer / LayerNormへ適⽤ [Chefer+, CVPR21]](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![定量的結果:最も⼈間に近いマスクを⽣成 - 24 - 被験者4⼈が作成した200サンプルのクラックマスクとのIoUを計測 ⼈間が作成したクラックマスクと最も近く、適切にクラック領域を注⽬ IoU↑ RISE [Petisuk+, BMVC18]](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_24.jpg){kind=link}
![定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 25 - 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] 注⽬領域が画像全体に広がり、何もな い道路にも注⽬](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_25.jpg){kind=link}
![[Selvaraju+] 定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 26 - RISE LRP ABN Ours (LRP-ABN)](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_26.jpg){kind=link}
![[Selvaraju+] 定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 27 - RISE LRP ABN Ours (LRP-ABN)](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_27.jpg){kind=link}
![[Selvaraju+] 定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 28 - RISE LRP ABN Ours (LRP-ABN)](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_28.jpg){kind=link}
![[Selvaraju+] 定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 29 - RISE LRP ABN Ours (LRP-ABN)](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_29.jpg){kind=link}
![[Selvaraju+] 定性的結果1/2:提案⼿法は過不⾜なくクラックに注⽬ - 30 - RISE LRP ABN Ours (LRP-ABN)](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_30.jpg){kind=link}
{kind=link}
![定性的結果2/2:提案⼿法は過不⾜なくクラックに注⽬ - 32 - 提案⼿法は詳細にクラックに注⽬してお り、領域の過不⾜がない RISE[Petisuk+, BMVC18] クラック周囲の道路にのみ注⽬ GradCAM[Selvaraju,](https://files.speakerdeck.com/presentations/a19b135e128f47cab2ffc70c9d3e081c/slide_32.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}