Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
ロボが人間並みに器用になる日は近い~ロボット触覚と深層強化学習の融合
Search
moroqq82
July 25, 2025
Research
0
7
ロボが人間並みに器用になる日は近い~ロボット触覚と深層強化学習の融合
ロボット触覚の進展と深層強化学習によるロボット制御が合わされば、ロボットは人間並みに器用になるのでは?と考えて、私見をまとめました。
moroqq82
July 25, 2025
Tweet
Share
More Decks by moroqq82
See All by moroqq82
GPT-4による足し算実験から示唆されるLLMの課題
motohiro_okaya
0
210
Business Platform based on Artificial General Intelligence
motohiro_okaya
0
120
Other Decks in Research
See All in Research
第66回コンピュータビジョン勉強会@関東 Epona: Autoregressive Diffusion World Model for Autonomous Driving
kentosasaki
0
530
20年前に50代だった人たちの今
hysmrk
0
180
【NICOGRAPH2025】Photographic Conviviality: ボディペイント・ワークショップによる 同時的かつ共生的な写真体験
toremolo72
0
200
教師あり学習と強化学習で作る 最強の数学特化LLM
analokmaus
2
1k
データサイエンティストをめぐる環境の違い2025年版〈一般ビジネスパーソン調査の国際比較〉
datascientistsociety
PRO
0
1k
衛星×エッジAI勉強会 衛星上におけるAI処理制約とそ取組について
satai
4
360
病院向け生成AIプロダクト開発の実践と課題
hagino3000
0
590
ScoreMatchingRiesz for Automatic Debiased Machine Learning and Policy Path Estimation with an Application to Japanese Monetary Policy Evaluation
masakat0
0
200
svc-hook: hooking system calls on ARM64 by binary rewriting
retrage
2
180
「行ける・行けない表」による地域公共交通の性能評価
bansousha
0
130
AI Agentの精度改善に見るML開発との共通点 / commonalities in accuracy improvements in agentic era
shimacos
6
1.4k
「車1割削減、渋滞半減、公共交通2倍」を 熊本から岡山へ@RACDA設立30周年記念都市交通フォーラム2026
trafficbrain
1
840
Featured
See All Featured
技術選定の審美眼(2025年版) / Understanding the Spiral of Technologies 2025 edition
twada
PRO
118
110k
Dealing with People You Can't Stand - Big Design 2015
cassininazir
367
27k
Product Roadmaps are Hard
iamctodd
PRO
55
12k
Are puppies a ranking factor?
jonoalderson
1
3.2k
[RailsConf 2023] Rails as a piece of cake
palkan
59
6.4k
How Software Deployment tools have changed in the past 20 years
geshan
0
33k
How to build an LLM SEO readiness audit: a practical framework
nmsamuel
1
700
A brief & incomplete history of UX Design for the World Wide Web: 1989–2019
jct
1
330
Facilitating Awesome Meetings
lara
57
6.8k
svc-hook: hooking system calls on ARM64 by binary rewriting
retrage
2
180
Impact Scores and Hybrid Strategies: The future of link building
tamaranovitovic
0
240
Large-scale JavaScript Application Architecture
addyosmani
515
110k
Transcript
ロボが人間並みに器用になる日は近い ~ロボット触覚と深層強化学習の融合~ 1 2025年7月26日 岡谷 基弘
この資料は何? 2 向こう1~2年で起きる可能性が高いと考えている ロボット業界のブレークスルーについての私見を述 べたもの
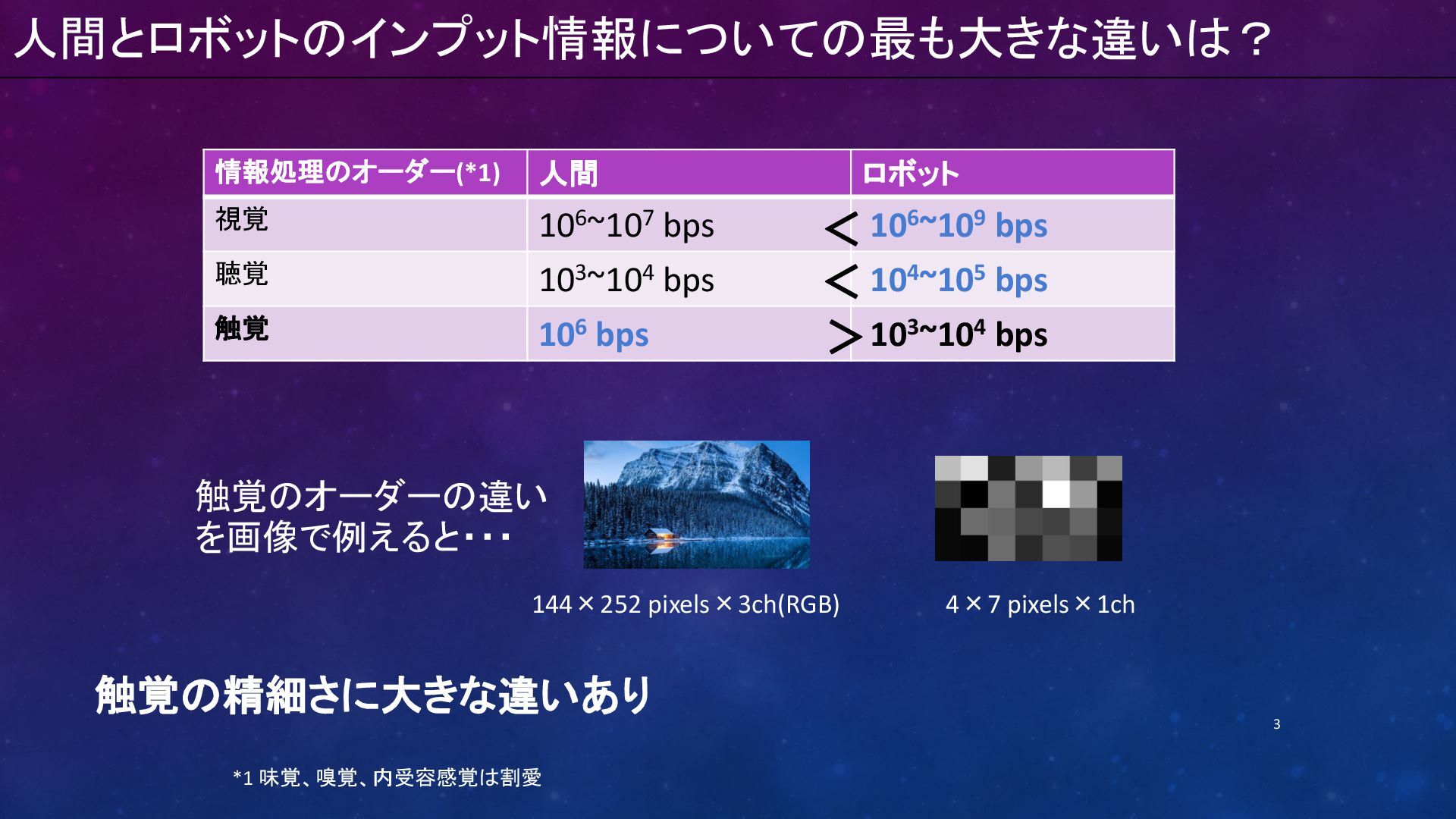
人間とロボットのインプット情報についての最も大きな違いは? 3 情報処理のオーダー(*1) 人間 ロボット 視覚 106~107 bps 106~109 bps
聴覚 103~104 bps 104~105 bps 触覚 106 bps 103~104 bps *1 味覚、嗅覚、内受容感覚は割愛 触覚の精細さに大きな違いあり 144×252 pixels×3ch(RGB) 4×7 pixels×1ch 触覚のオーダーの違い を画像で例えると・・・ < < >
触覚センサ開発の動向 4 2024 Digit360(*5) 2010 2015 2017 2019 2021 2023
GelSight(*2) Digit 2025 640×480, 30fps BioTac(*1) *! https://wiki.ros.org/BioTac *2 https://www.gelsight.com/ *3 The TacTip Family: Soft Optical Tactile Sensors with 3D-Printed Biomimetic Morphologies – PMC *4株式会社 FingerVision|触覚センサ *5 Digit 360 | Digit - Dexterous Manipulation and Touch Perception *6 Embedding high-resolution touch across robotic hands enables adaptive human-like grasping | Nature Machine Intelligence *7 受容繊維密度で計算。正確には4種類の触覚受容器それぞれで時間解像度と空間解像度が異なる 19, 数百fps TacTip(*3) 127, 30fps FingerVision(*4) F-TAC Hand(*6) 10000/cm2 8.3 M, 240fps 人間の手の数千~数万ピクセル ×数百fps(*7)に肉薄 (部分的には超え始めた)
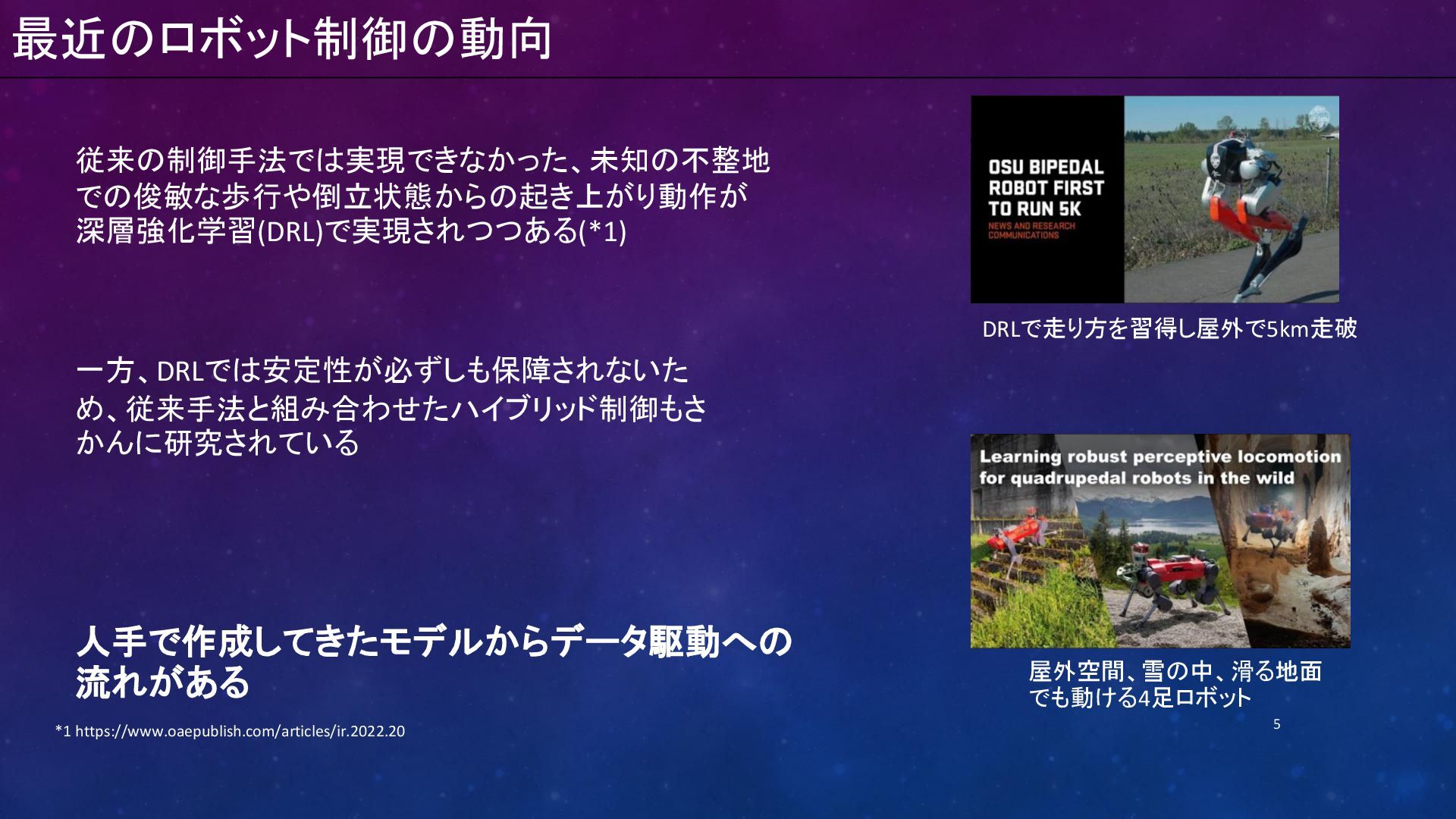
最近のロボット制御の動向 5 従来の制御手法では実現できなかった、未知の不整地 での俊敏な歩行や倒立状態からの起き上がり動作が 深層強化学習(DRL)で実現されつつある(*1) 一方、DRLでは安定性が必ずしも保障されないた め、従来手法と組み合わせたハイブリッド制御もさ かんに研究されている 人手で作成してきたモデルからデータ駆動への 流れがある
*1 https://www.oaepublish.com/articles/ir.2022.20 DRLで走り方を習得し屋外で5km走破 屋外空間、雪の中、滑る地面 でも動ける4足ロボット
BITTER LESSON 6 人手で作ったモデルではなく、汎用的な手法がデータと計算量で圧倒してきた 画像処理:SIFT特徴量などから深層学習へ 自然言語処理:n-gramなどからLLMへ 触覚は・・・ 触覚は今までデータがなかった (柔らかいハンドの場合、シミュレーションでデータを得ることも難しい(*1)) これからは?
*1 有限要素法による計算が必要でそれに莫大な計算時間がかかるため http://www.incompleteideas.net/IncIdeas/BitterLesson.html
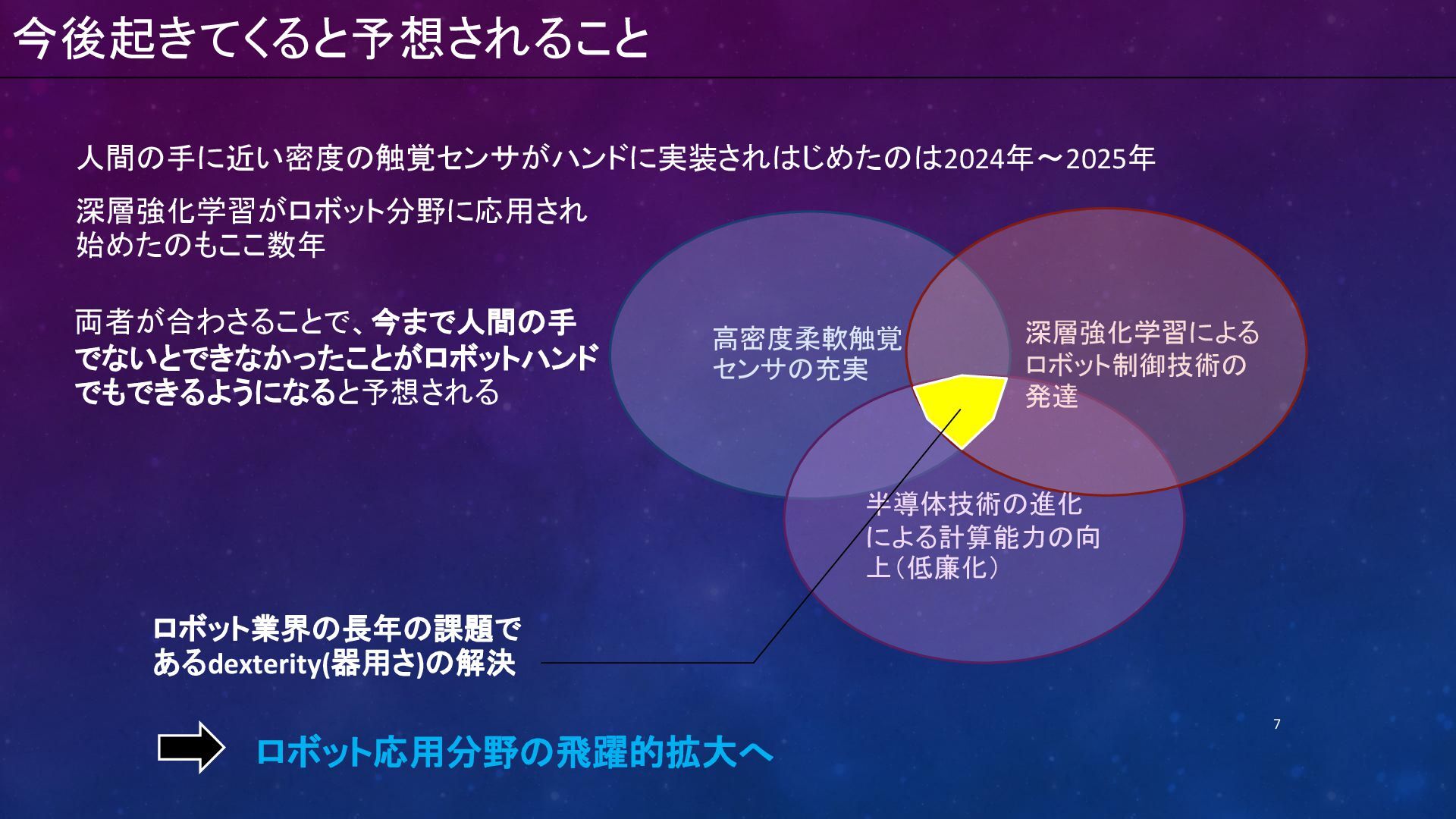
今後起きてくると予想されること 7 人間の手に近い密度の触覚センサがハンドに実装されはじめたのは2024年~2025年 高密度柔軟触覚 センサの充実 深層強化学習による ロボット制御技術の 発達 半導体技術の進化 による計算能力の向
上(低廉化) ロボット業界の長年の課題で あるdexterity(器用さ)の解決 ロボット応用分野の飛躍的拡大へ 深層強化学習がロボット分野に応用され 始めたのもここ数年 両者が合わさることで、今まで人間の手 でないとできなかったことがロボットハンド でもできるようになると予想される
まとめ 8
まとめ 9 • 2025年現在、ロボット触覚は人間の手の触覚の解像度に肉薄している • 4足ロボットやヒューマノイドは深層強化学習によって、従来の制御手法だけではでき ない多様な行動が可能になっている • Bitter lessonを踏まえると、人間の手に準ずる触覚(データ)と深層強化学習(計算量)
によって、ロボットハンドの「器用さ」の問題は解決される可能性が高い(少なくとも、 「解決された」と主張する論文が1年以内程度で出てくると予想される) • 触覚センサとハンドの開発動向は要チェック!
END 10
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}