Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
NextGen Chore
Search
oggata
January 01, 2026
Education
16
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
NextGen Chore
https://www.youtube.com/watch?v=NIOx5p-Cz9c
oggata
January 01, 2026
More Decks by oggata
See All by oggata
セルから世界へ ------Life Gameからパックマン、そしてWorld Modelまでの世界生成シミュレーション入門
oggata
0
390
MESAワールドモデルとマルチエージェントによる人間行動シミュレーション :仮想から現実世界への架け橋
oggata
0
30
ecological_niche_reward_function_v3
oggata
0
14
MESA_MINI_DINOv2_Pipeline
oggata
0
15
Self-Introduction
oggata
0
35
Gaming & PhisicalAI
oggata
0
70
savanna_sim.py
oggata
0
8
Beyond LLM:世界モデルが切り拓くフィジカルAIの時代
oggata
0
39
MESAワールドモデルとマルチエージェントによる人間行動シミュレーション :仮想から現実世界への架け橋
oggata
0
410
Other Decks in Education
See All in Education
[2026前期火5] 論理学(京都大学文学部 前期 第4回)「 ならば(→)の導入と証明ネット」
yatabe
0
510
解決策を教えても次期リーダーは育たない ─ 器の発達に伴走するために / Partnering with leaders in their vertical development
matsu0228
1
570
Human-AI Interaction - Lecture 11 - Next Generation User Interfaces (4018166FNR)
signer
PRO
0
1.1k
AI-Based Speaking Assessment of a Short-Term Study Abroad Program
uranoken
0
380
Lectura 1 (PIT : Python Basico)
robintux
0
390
Visionary Initiative: Materials-Positive Society 「モノの進化をポジティブな社会の原動力に」|Science Tokyo(東京科学大学)
sciencetokyo
PRO
0
780
[2026前期火5] 論理学(京都大学文学部 前期 第9回)「正規化の停止性——ヒドラゲームによる証明」
yatabe
0
200
勾配ブースティングと決定木の話 / gradient boosting and decision trees
kaityo256
PRO
7
1.7k
Laura Wilson - The Quarterly PR Pivot
laurawilsonbseo1
1
380
良書紹介08_ 頭のいい子がやっているすごいグラフの読み方
bunnchinn3
0
120
Implicit and Cross-Device Interaction - Lecture 10 - Next Generation User Interfaces (4018166FNR)
signer
PRO
2
2.3k
焦燥を平穏に変えるエンジニアのための哲学
ichimichi
7
6.3k
Featured
See All Featured
実際に使うSQLの書き方 徹底解説 / pgcon21j-tutorial
soudai
PRO
201
75k
Refactoring Trust on Your Teams (GOTO; Chicago 2020)
rmw
35
3.7k
Evolving SEO for Evolving Search Engines
ryanjones
0
250
Building Applications with DynamoDB
mza
96
7.1k
A brief & incomplete history of UX Design for the World Wide Web: 1989–2019
jct
2
430
Building a Scalable Design System with Sketch
lauravandoore
463
34k
Speed Design
sergeychernyshev
33
1.9k
How STYLIGHT went responsive
nonsquared
100
6.2k
Save Time (by Creating Custom Rails Generators)
garrettdimon
PRO
32
4k
Raft: Consensus for Rubyists
vanstee
141
7.6k
JavaScript: Past, Present, and Future - NDC Porto 2020
reverentgeek
52
6k
Side Projects
sachag
455
43k
Transcript
NEXTGEN CHORE Fumitoshi Ogata PRESENTED BY : お手伝いで未来のロボットを育てる ブロックチェーン ×
JPYC × ロボット学習 家庭から始まる、新しいデータ エコノミー お手伝いで未来のロボットを育てる ブロックチェーン × JPYC × ロボット学習 家庭から始まる、新しいデータ エコノミー
NEXTGEN CHORE NEXTGEN CHORE お手伝いで未来のロボットを育てる ブロックチェーン × JPYC × ロボット学習
家庭から始まる、新しいデータエコノミー お手伝いで未来のロボットを育てる ブロックチェーン × JPYC × ロボット学習 家庭から始まる、新しいデータエコノミー
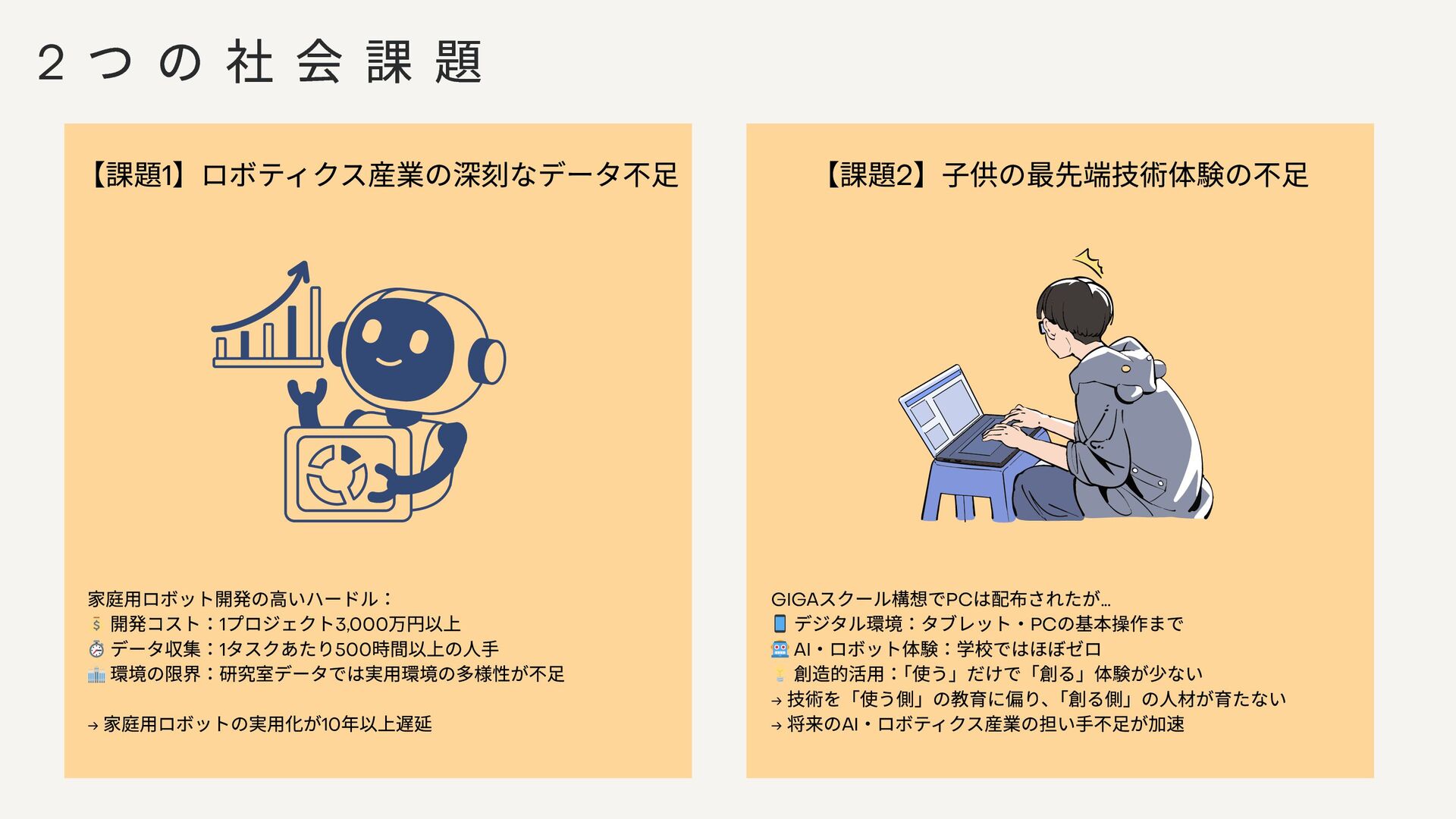
【課題1 】ロボティクス産業の深刻なデータ不足 家庭用ロボット開発の高いハードル: 💰 開発コスト:1 プロジェクト3,000 万円以上 ⏱️ データ収集:1 タスクあたり500
時間以上の人手 🏢 環境の限界:研究室データでは実用環境の多様性が不足 → 家庭用ロボットの実用化が10 年以上遅延 【課題2 】子供の最先端技術体験の不足 GIGA スクール構想でPC は配布されたが... 📱 デジタル環境:タブレット・PC の基本操作まで 🤖 AI ・ロボット体験:学校ではほぼゼロ 💡 創造的活用: 「使う」だけで「創る」体験が少ない → 技術を「使う側」の教育に偏り、 「創る側」の人材が育たない → 将来のAI ・ロボティクス産業の担い手不足が加速 2 つ の 社 会 課 題
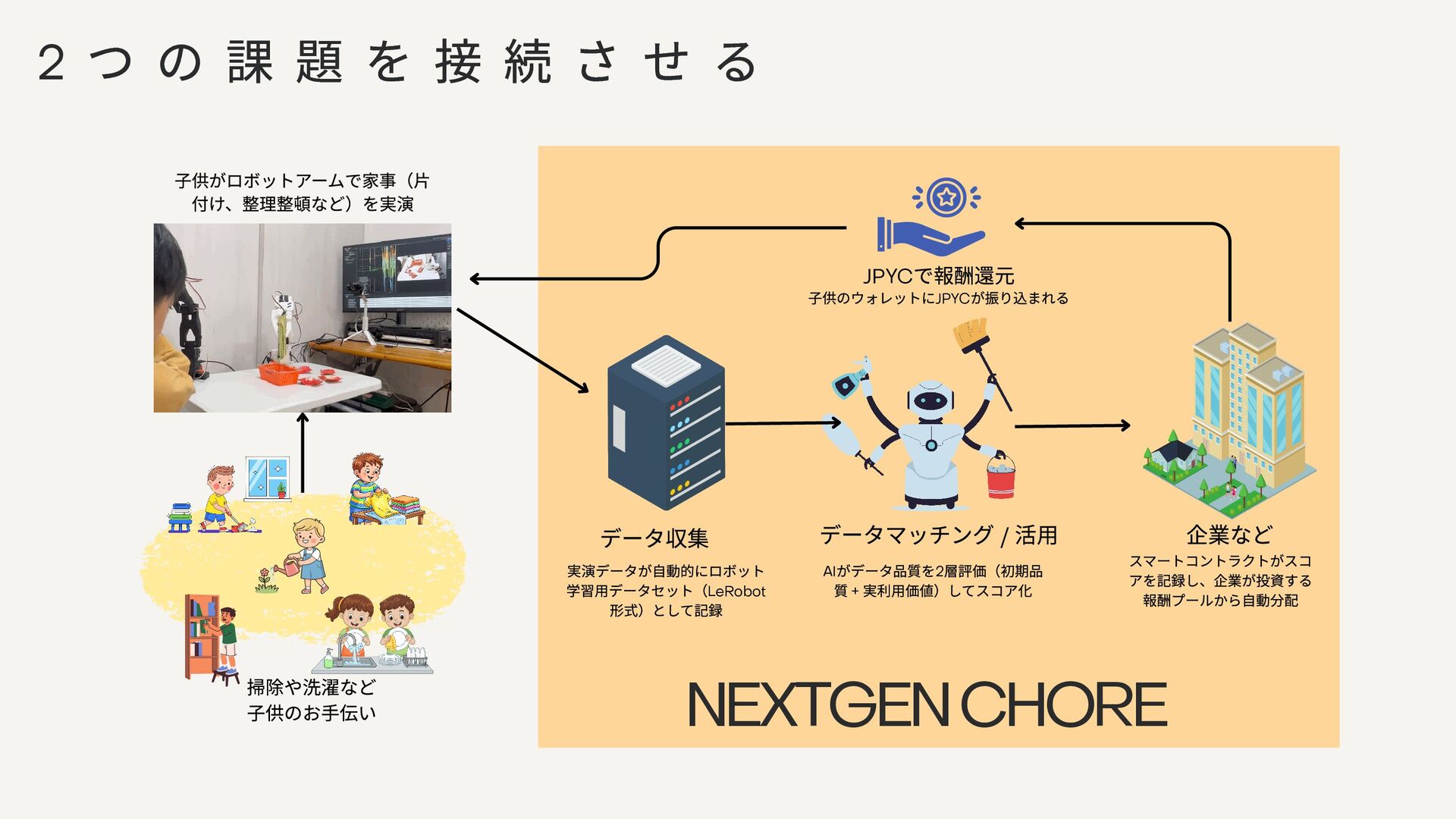
2 つ の 課 題 を 接 続 さ せ
る JPYC で報酬還元 掃除や洗濯など 子供のお手伝い データマッチング / 活用 企業など NEXTGEN CHORE 子供がロボットアームで家事(片 付け、整理整頓など)を実演 実演データが自動的にロボット 学習用データセット(LeRobot 形式)として記録 AI がデータ品質を2 層評価(初期品 質 + 実利用価値)してスコア化 スマートコントラクトがスコ アを記録し、企業が投資する 報酬プールから自動分配 データ収集 子供のウォレットにJPYC が振り込まれる
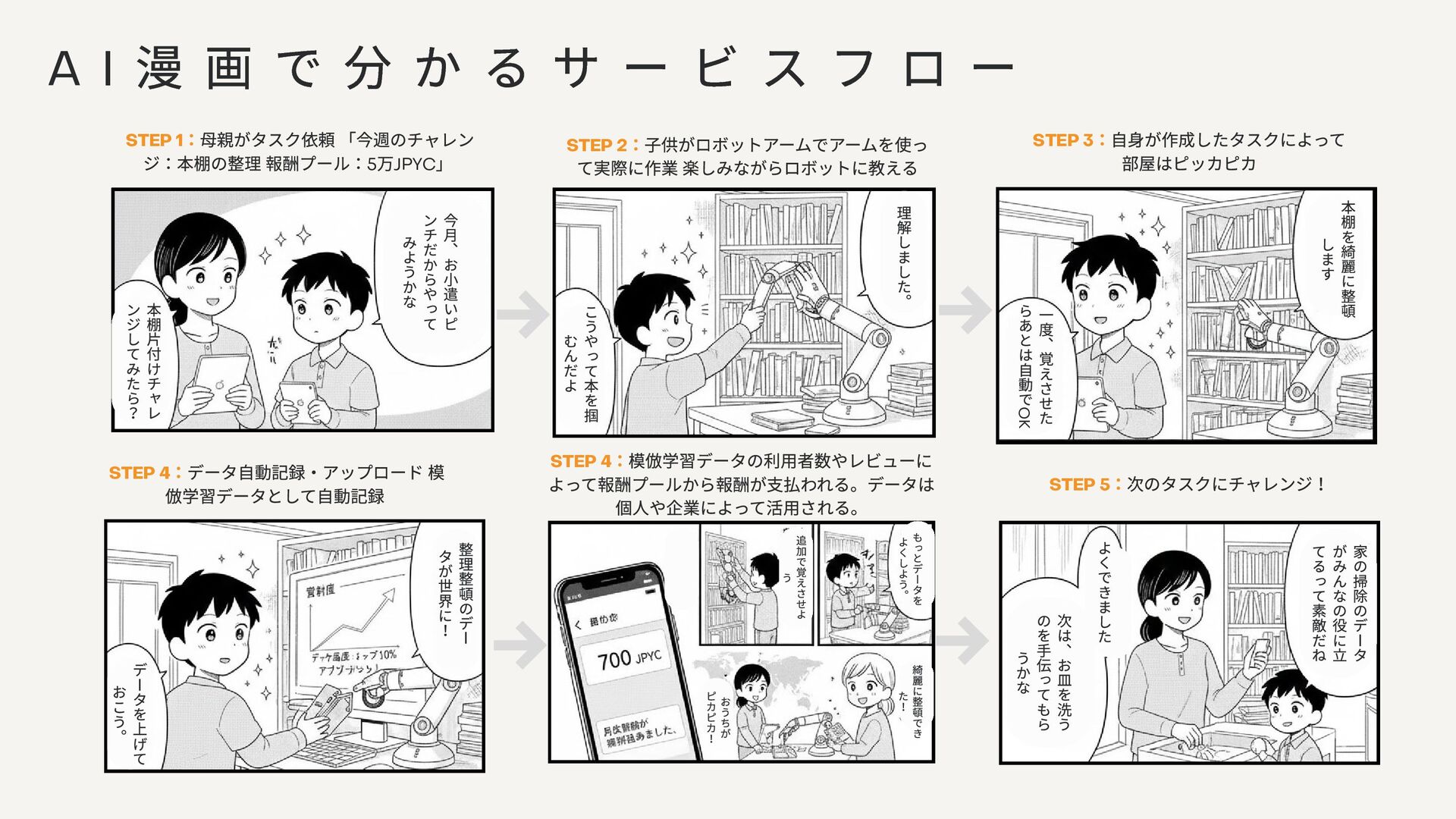
STEP 2 :子供がロボットアームでアームを使っ て実際に作業 楽しみながらロボットに教える STEP 4 :データ自動記録・アップロード 模 倣学習データとして自動記録
STEP 4 :模倣学習データの利用者数やレビューに よって報酬プールから報酬が支払われる。データは 個人や企業によって活用される。 STEP 5 :次のタスクにチャレンジ! A I 漫 画 で 分 か る サ ー ビ ス フ ロ ー STEP 1 :母親がタスク依頼 「今週のチャレン ジ:本棚の整理 報酬プール:5 万JPYC 」 STEP 3 :自身が作成したタスクによって 部屋はピッカピカ 本 棚 片 付 け チ ャ レ ン ジ し て み た ら ? 今 月 、 お 小 遣 い ピ ン チ だ か ら や っ て み よ う か な こ う や っ て 本 を 掴 む ん だ よ 理 解 し ま し た 。 一 度 、 覚 え さ せ た ら あ と は 自 動 で OK 本 棚 を 綺 麗 に 整 頓 し ま す デ ー タ を 上 げ て お こ う 。 整 理 整 頓 の デ ー タ が 世 界 に ! 綺 麗 に 整 頓 で き た ! お う ち が ピ カ ピ カ ! も っ と デ ー タ を よ く し よ う 。 追 加 で 覚 え さ せ よ う 次 は 、 お 皿 を 洗 う の を 手 伝 っ て も ら う か な よ く で き ま し た 家 の 掃 除 の デ ー タ が み ん な の 役 に 立 て る っ て 素 敵 だ ね
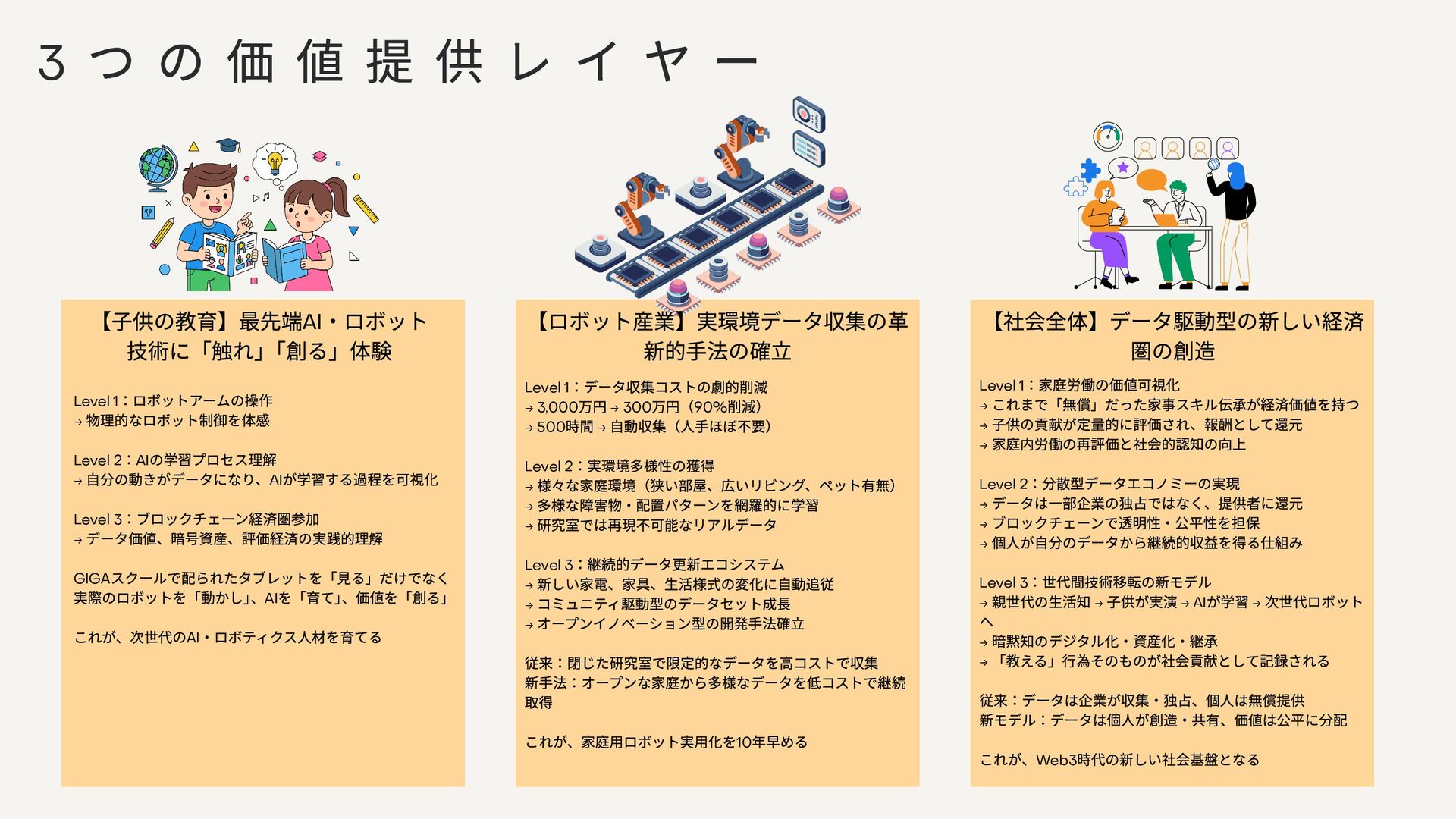
3 つ の 価 値 提 供 レ イ ヤ
ー 【子供の教育】最先端AI ・ロボット 技術に「触れ」 「創る」体験 【ロボット産業】実環境データ収集の革 新的手法の確立 【社会全体】データ駆動型の新しい経済 圏の創造 Level 1 :ロボットアームの操作 → 物理的なロボット制御を体感 Level 2 :AI の学習プロセス理解 → 自分の動きがデータになり、AI が学習する過程を可視化 Level 3 :ブロックチェーン経済圏参加 → データ価値、暗号資産、評価経済の実践的理解 GIGA スクールで配られたタブレットを「見る」だけでなく 実際のロボットを「動かし」 、AI を「育て」 、価値を「創る」 これが、次世代のAI ・ロボティクス人材を育てる Level 1 :データ収集コストの劇的削減 → 3,000 万円 → 300 万円(90% 削減) → 500 時間 → 自動収集(人手ほぼ不要) Level 2 :実環境多様性の獲得 → 様々な家庭環境(狭い部屋、広いリビング、ペット有無) → 多様な障害物・配置パターンを網羅的に学習 → 研究室では再現不可能なリアルデータ Level 3 :継続的データ更新エコシステム → 新しい家電、家具、生活様式の変化に自動追従 → コミュニティ駆動型のデータセット成長 → オープンイノベーション型の開発手法確立 従来:閉じた研究室で限定的なデータを高コストで収集 新手法:オープンな家庭から多様なデータを低コストで継続 取得 これが、家庭用ロボット実用化を10 年早める Level 1 :家庭労働の価値可視化 → これまで「無償」だった家事スキル伝承が経済価値を持つ → 子供の貢献が定量的に評価され、報酬として還元 → 家庭内労働の再評価と社会的認知の向上 Level 2 :分散型データエコノミーの実現 → データは一部企業の独占ではなく、提供者に還元 → ブロックチェーンで透明性・公平性を担保 → 個人が自分のデータから継続的収益を得る仕組み Level 3 :世代間技術移転の新モデル → 親世代の生活知 → 子供が実演 → AI が学習 → 次世代ロボット へ → 暗黙知のデジタル化・資産化・継承 → 「教える」行為そのものが社会貢献として記録される 従来:データは企業が収集・独占、個人は無償提供 新モデル:データは個人が創造・共有、価値は公平に分配 これが、Web3 時代の新しい社会基盤となる
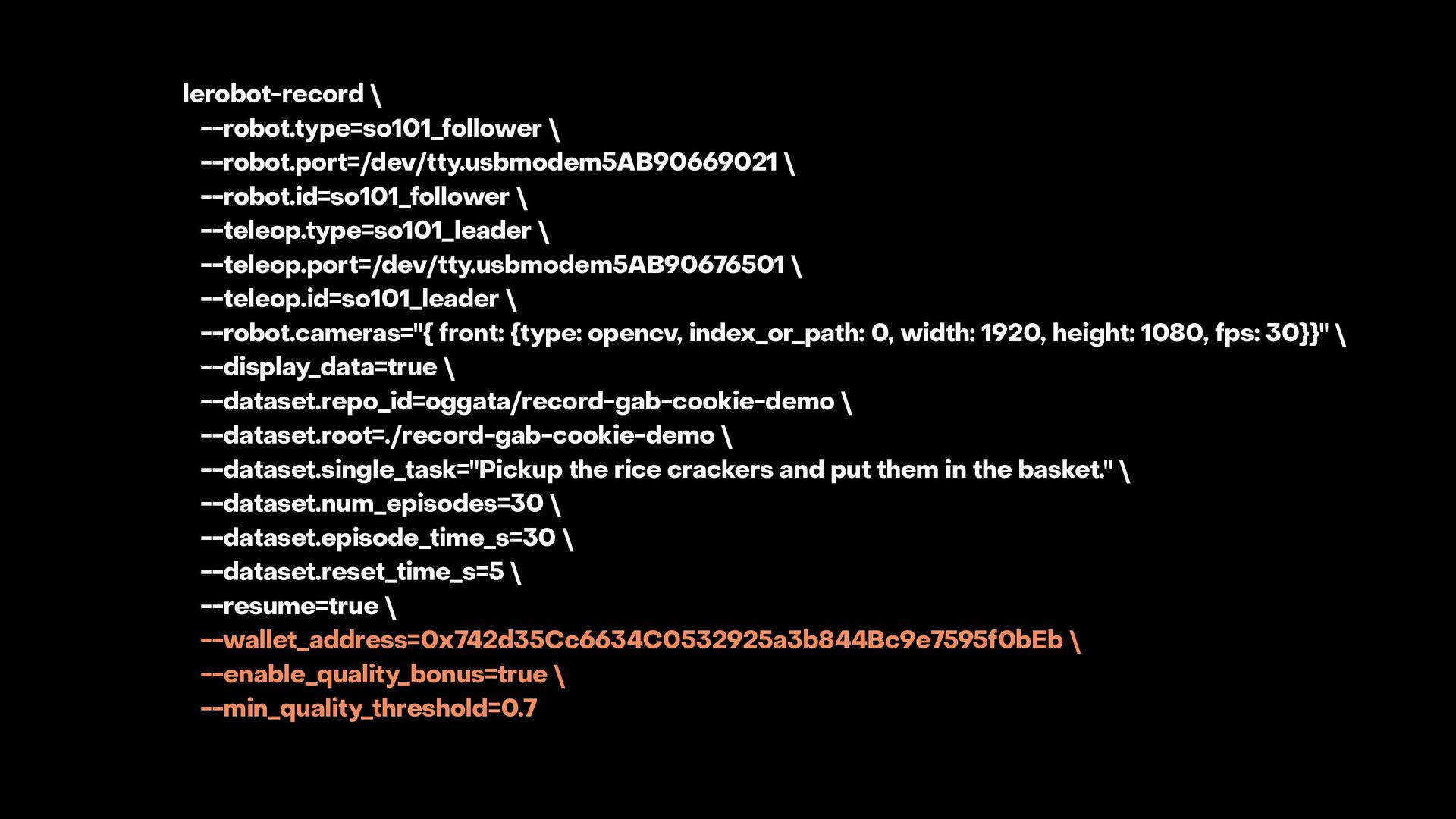
lerobot-record \ --robot.type=so101_follower \ --robot.port=/dev/tty.usbmodem5AB90669021 \ --robot.id=so101_follower \ --teleop.type=so101_leader \
--teleop.port=/dev/tty.usbmodem5AB90676501 \ --teleop.id=so101_leader \ --robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 1920, height: 1080, fps: 30}}" \ --display_data=true \ --dataset.repo_id=oggata/record-gab-cookie-demo \ --dataset.root=./record-gab-cookie-demo \ --dataset.single_task="Pickup the rice crackers and put them in the basket." \ --dataset.num_episodes=30 \ --dataset.episode_time_s=30 \ --dataset.reset_time_s=5 \ --resume=true \ --wallet_address=0x742d35Cc6634C0532925a3b844Bc9e7595f0bEb \ --enable_quality_bonus=true \ --min_quality_threshold=0.7
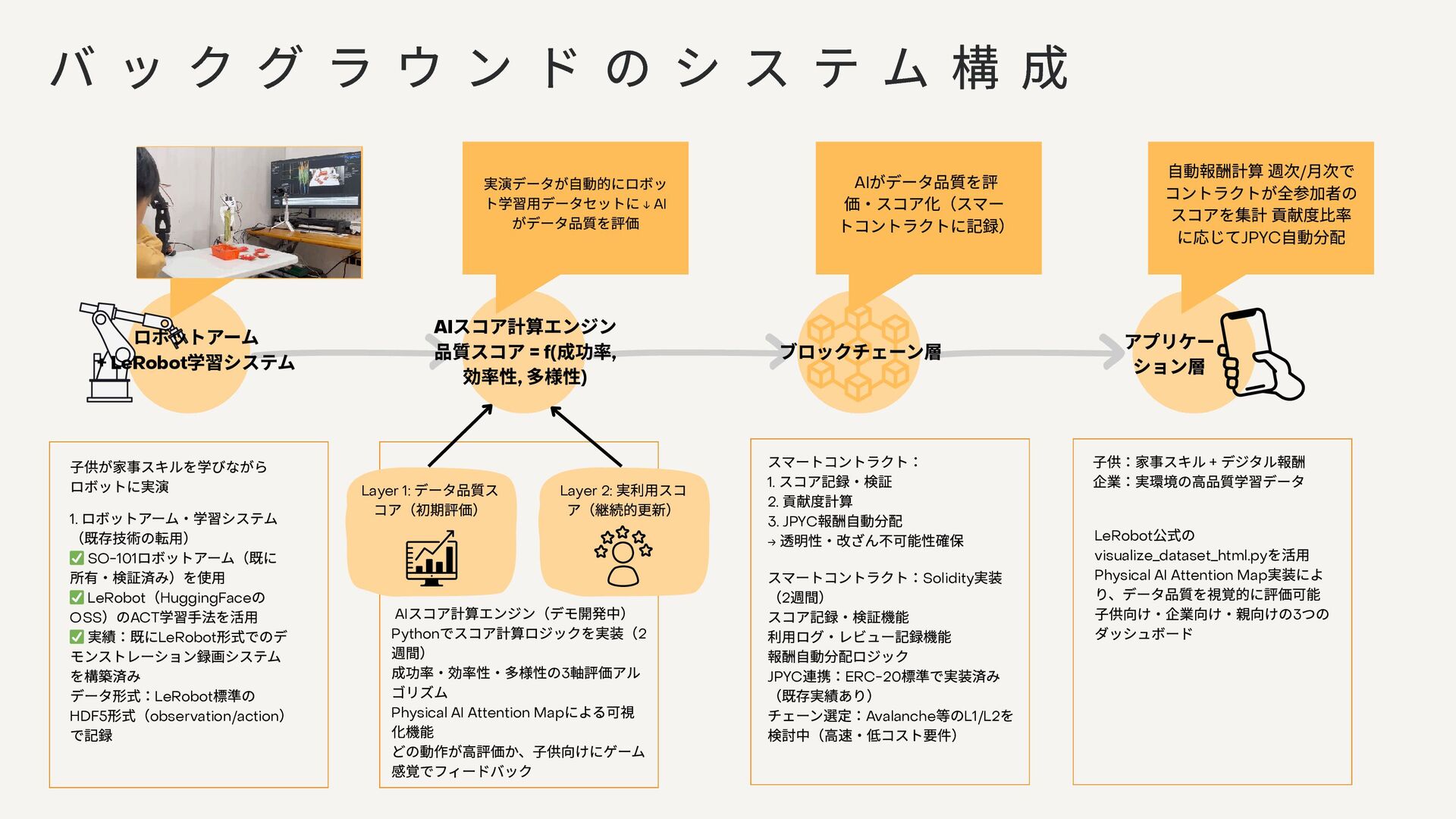
バ ッ ク グ ラ ウ ン ド の シ
ス テ ム 構 成 スマートコントラクト: 1. スコア記録・検証 2. 貢献度計算 3. JPYC 報酬自動分配 → 透明性・改ざん不可能性確保 ロボットアーム + LeRobot 学習システム AI スコア計算エンジン 品質スコア = f( 成功率, 効率性, 多様性) ブロックチェーン層 アプリケー ション層 Layer 1: データ品質ス コア(初期評価) Layer 2: 実利用スコ ア(継続的更新) 子供が家事スキルを学びながら ロボットに実演 実演データが自動的にロボッ ト学習用データセットに ↓ AI がデータ品質を評価 AI がデータ品質を評 価・スコア化(スマー トコントラクトに記録) 自動報酬計算 週次/ 月次で コントラクトが全参加者の スコアを集計 貢献度比率 に応じてJPYC 自動分配 子供:家事スキル + デジタル報酬 企業:実環境の高品質学習データ スマートコントラクト:Solidity 実装 (2 週間) スコア記録・検証機能 利用ログ・レビュー記録機能 報酬自動分配ロジック JPYC 連携:ERC-20 標準で実装済み (既存実績あり) チェーン選定:Avalanche 等のL1/L2 を 検討中(高速・低コスト要件) AI スコア計算エンジン(デモ開発中) Python でスコア計算ロジックを実装(2 週間) 成功率・効率性・多様性の3 軸評価アル ゴリズム Physical AI Attention Map による可視 化機能 どの動作が高評価か、子供向けにゲーム 感覚でフィードバック 1. ロボットアーム・学習システム (既存技術の転用) ✅ SO-101 ロボットアーム(既に 所有・検証済み)を使用 ✅ LeRobot (HuggingFace の OSS )のACT 学習手法を活用 ✅ 実績:既にLeRobot 形式でのデ モンストレーション録画システム を構築済み データ形式:LeRobot 標準の HDF5 形式(observation/action ) で記録 LeRobot 公式の visualize_dataset_html.py を活用 Physical AI Attention Map 実装によ り、データ品質を視覚的に評価可能 子供向け・企業向け・親向けの3 つの ダッシュボード
家庭から始まる、 新しい データエコノミー Thank you for your attention! NEXTGEN CHORE
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}