week, we’ll talk about what we don’t know…and how to deal with it. Last time, we talked about sources of UNCERTAINTY and ERRORS in raster data. Today, we’ll talk about ERROR MODELING and CHANGE DETECTION. How can we communicate errors in our raster analysis?
in accuracy Remotely Sensed/Aerial Surveys: Ground-Based/In Situ Surveys: Boat-Based/Bathymetric Surveys: Airborne light detection and ranging (e.g., lidar): +/- 12-25 cm Aerial photogrammetry: +/- 10-15 cm Total Station: +/- 2-10 cm Real-Time Kinematic Global Positioning System (RTK-GPS): +/- 3-12 cm Terrestrial Lidar: +/- 0.5-4 cm Multibeam and Singlebeam sonar: on par with terrestrial lidar How do we know this? By measuring the same point many times.
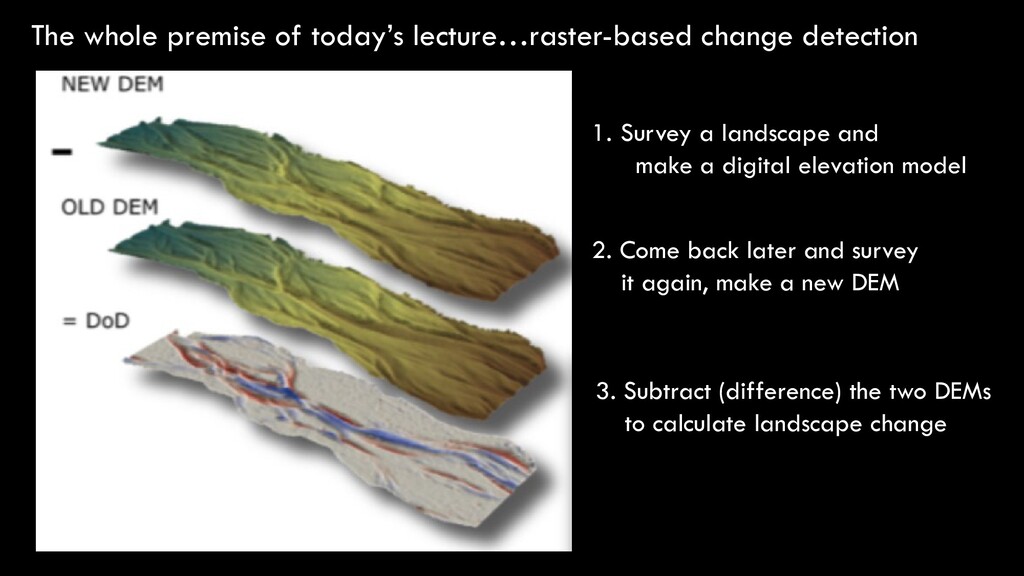
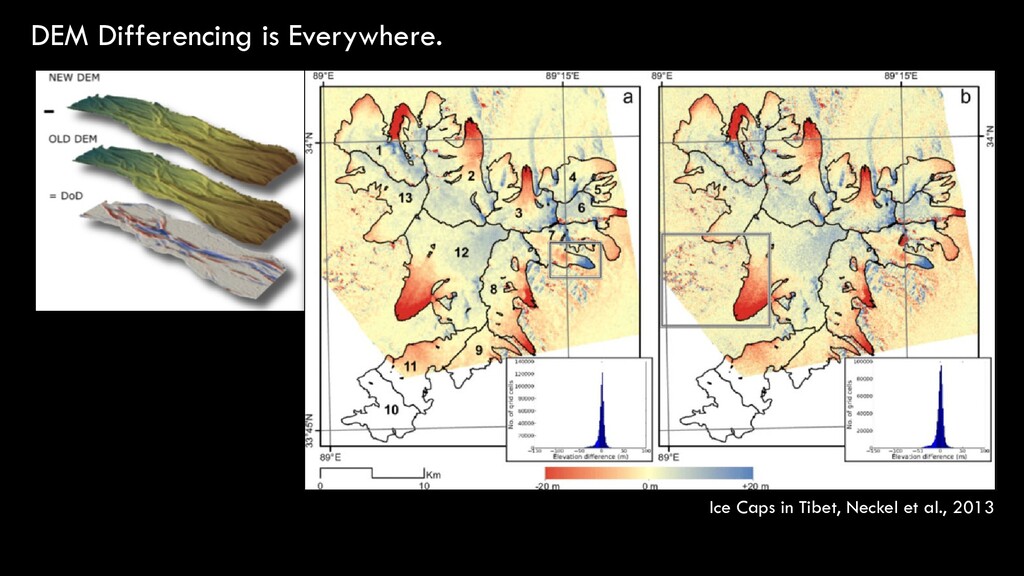
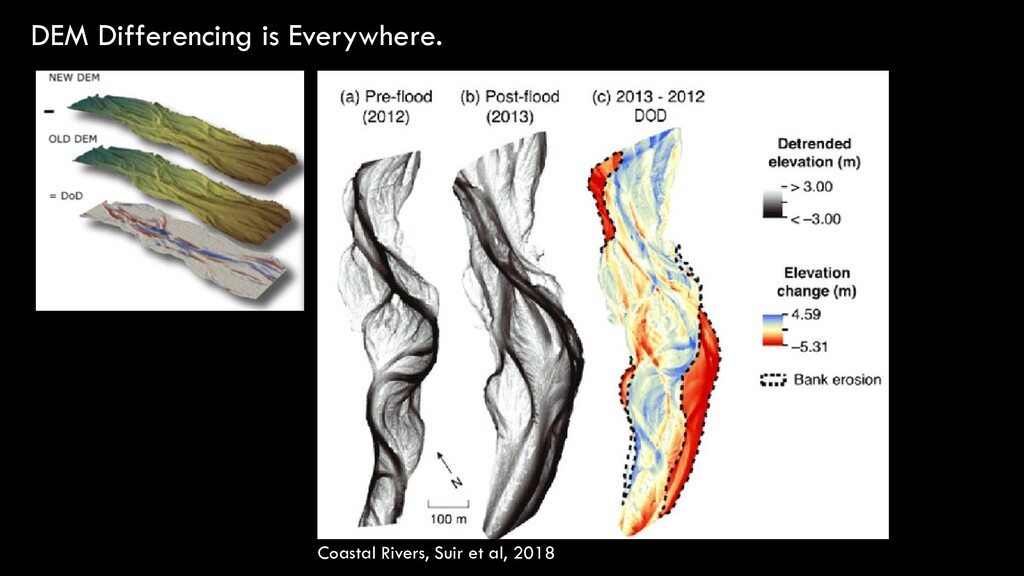
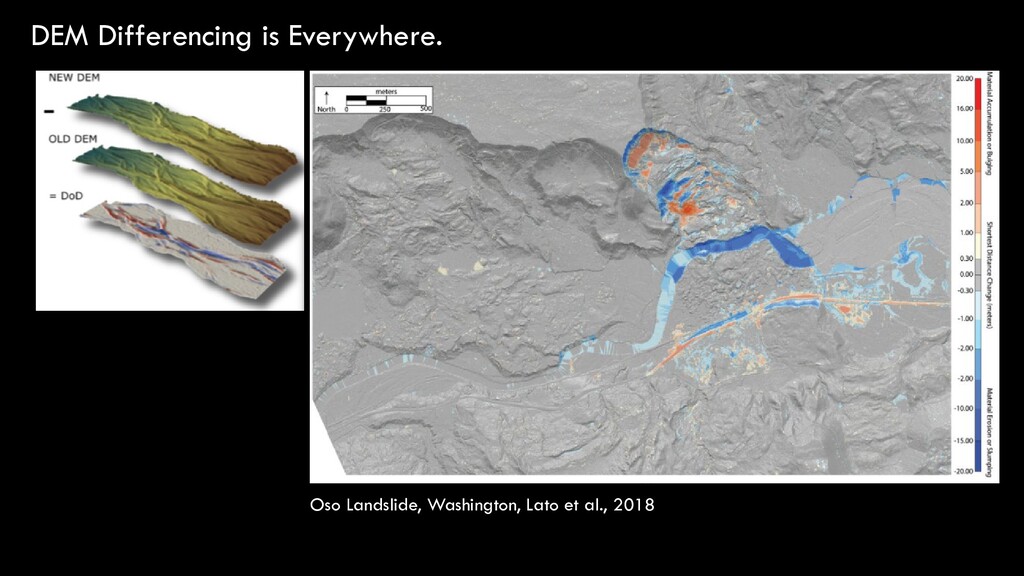
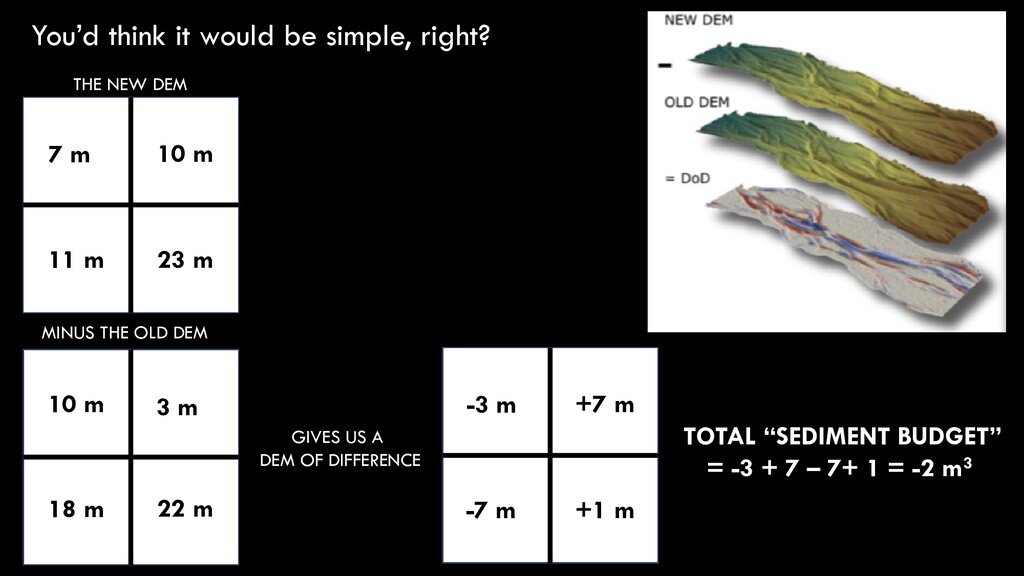
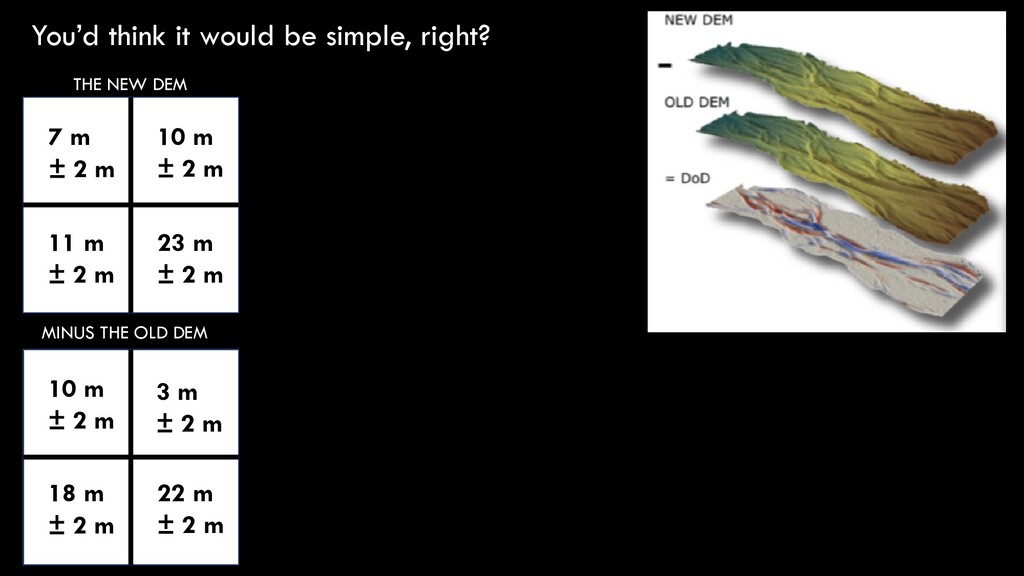
a landscape and make a digital elevation model 2. Come back later and survey it again, make a new DEM 3. Subtract (difference) the two DEMs to calculate landscape change
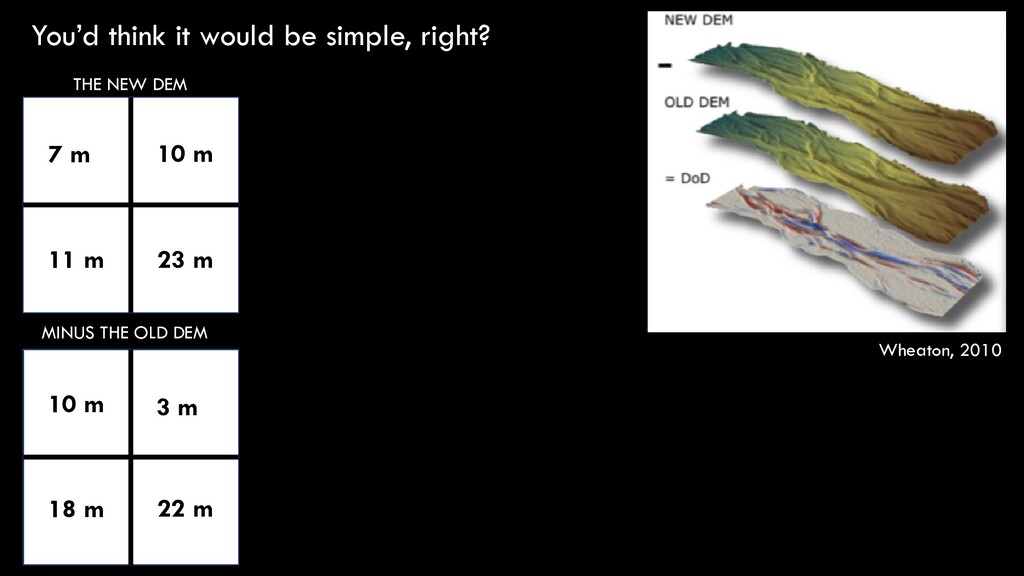
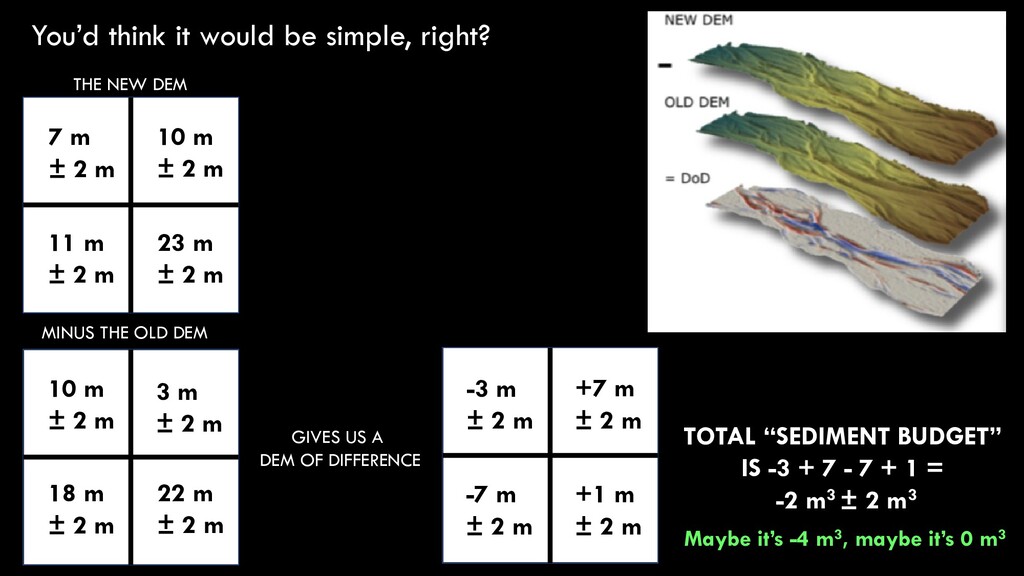
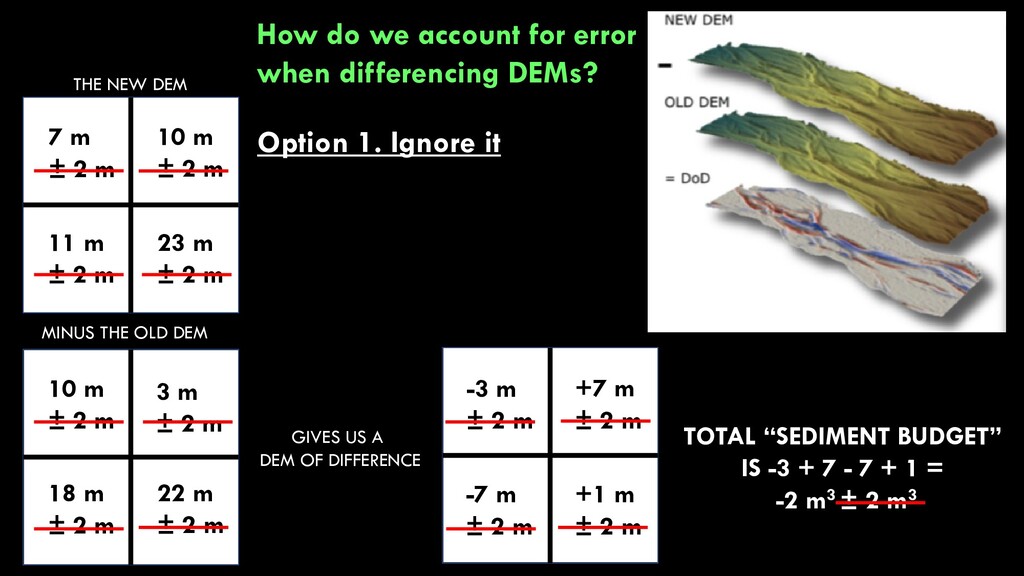
DEM GIVES US A DEM OF DIFFERENCE THE NEW DEM 7 m ± 2 m 23 m ± 2 m 10 m ± 2 m 11 m ± 2 m 10 m ± 2 m 3 m ± 2 m 18 m ± 2 m 22 m ± 2 m -3 m ± 2 m +1 m ± 2 m +7 m ± 2 m -7 m ± 2 m TOTAL “SEDIMENT BUDGET” IS -3 + 7 - 7 + 1 = -2 m3 ± 2 m3 Maybe it’s -4 m3, maybe it’s 0 m3
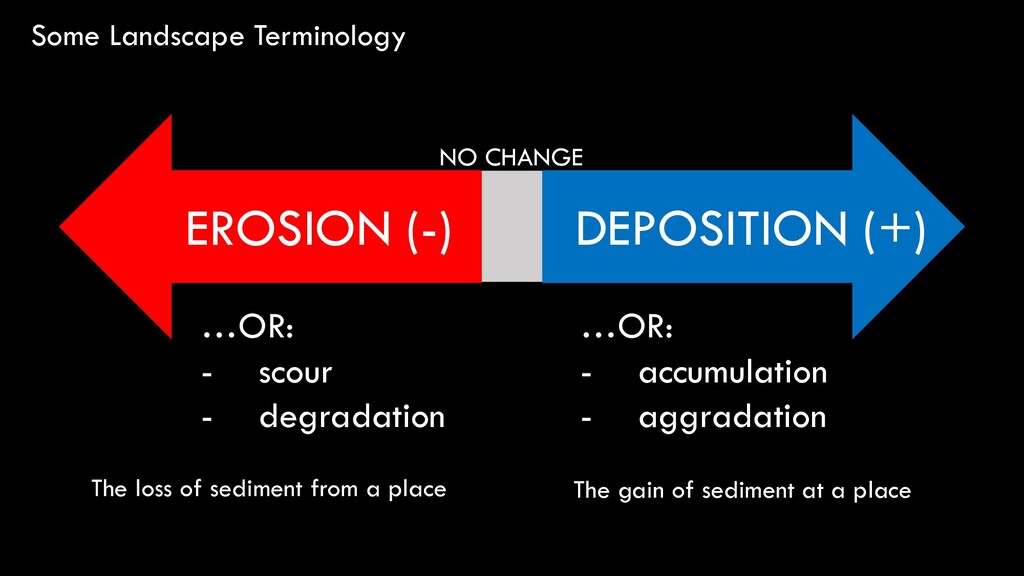
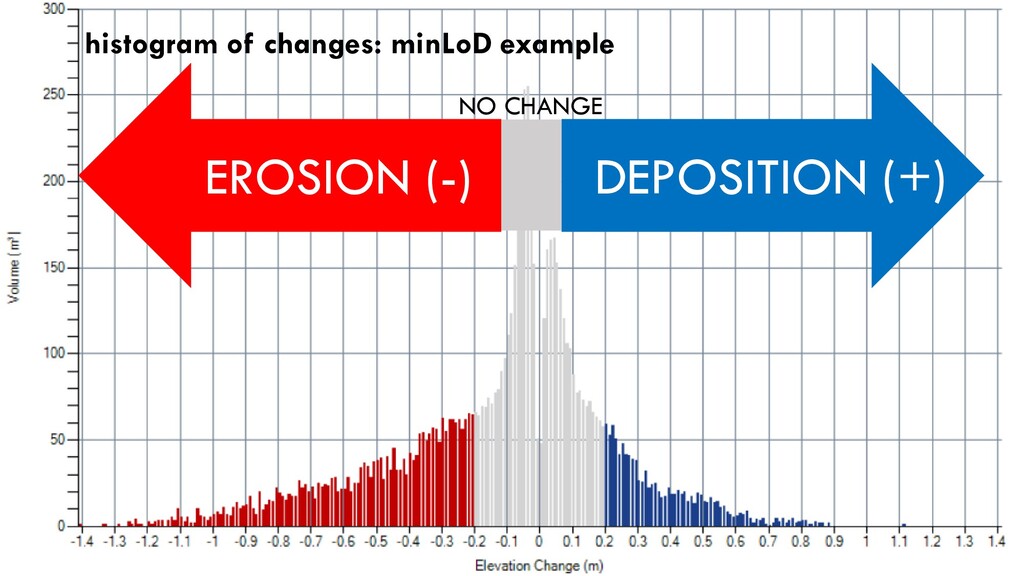
± 2 m +3 m ± 2 m -1 m ± 2 m -7 m ± 2 m +7 m ± 2 m …OR: - scour - degradation …OR: - accumulation - aggradation DEPOSITION (+) EROSION (-) NO CHANGE The loss of sediment from a place The gain of sediment at a place
DEM GIVES US A DEM OF DIFFERENCE THE NEW DEM 7 m ± 2 m 23 m ± 2 m 10 m ± 2 m 11 m ± 2 m 10 m ± 2 m 3 m ± 2 m 18 m ± 2 m 22 m ± 2 m -3 m ± 2 m +1 m ± 2 m +7 m ± 2 m -7 m ± 2 m TOTAL “SEDIMENT BUDGET” IS -3 + 7 - 7 + 1 = -2 m3 ± 2 m3 Maybe it’s 4 m3, maybe it’s 0 m3 Because our DEMs have error, so will our DEMs of Difference! …and sometimes this error is so large that we can’t tell if a place gained or lost sediment
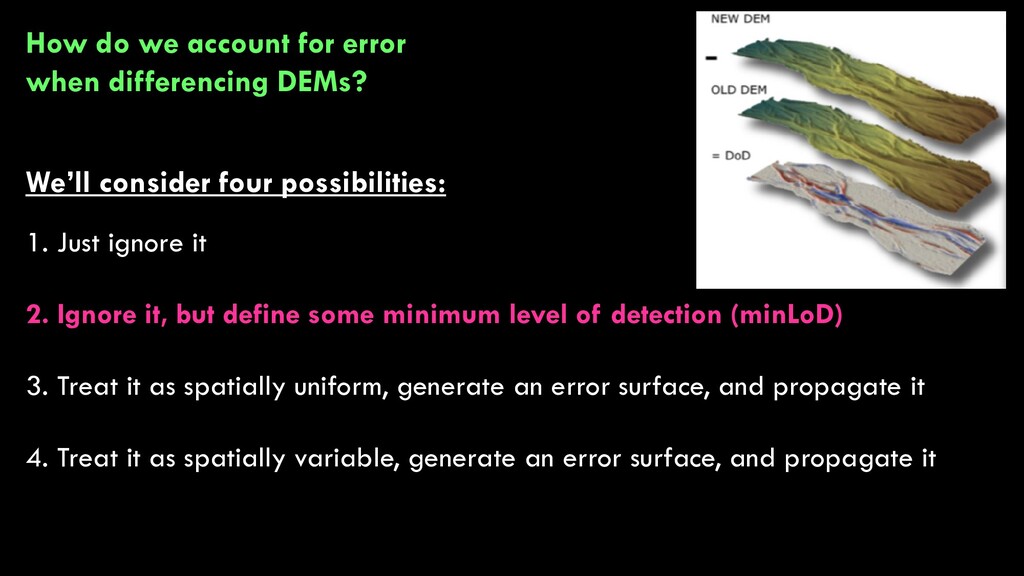
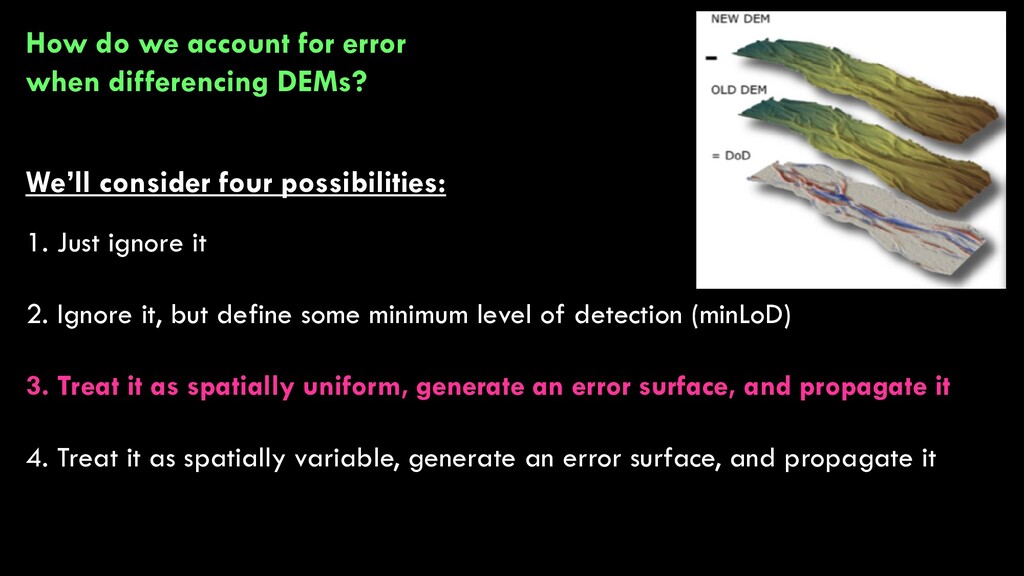
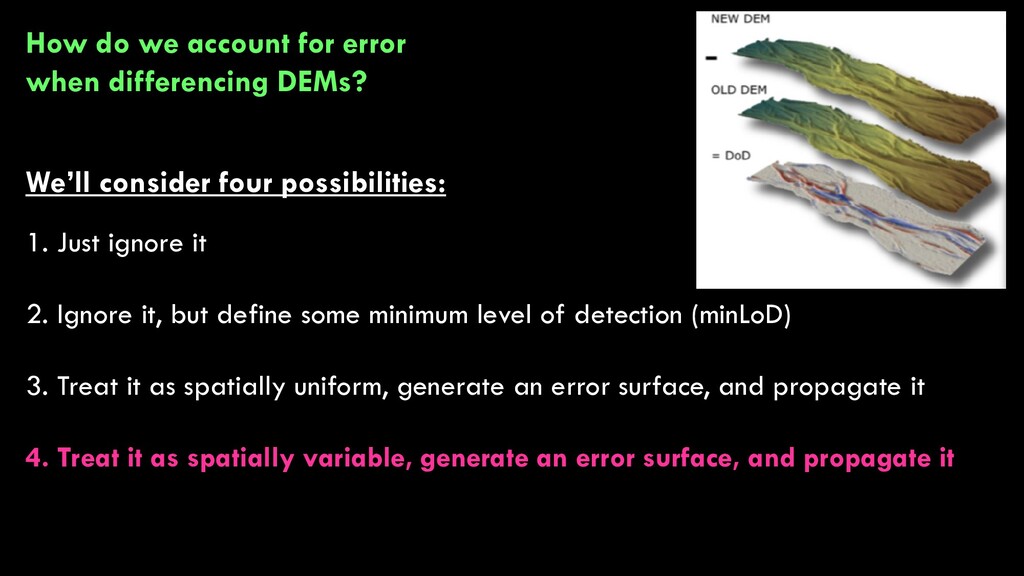
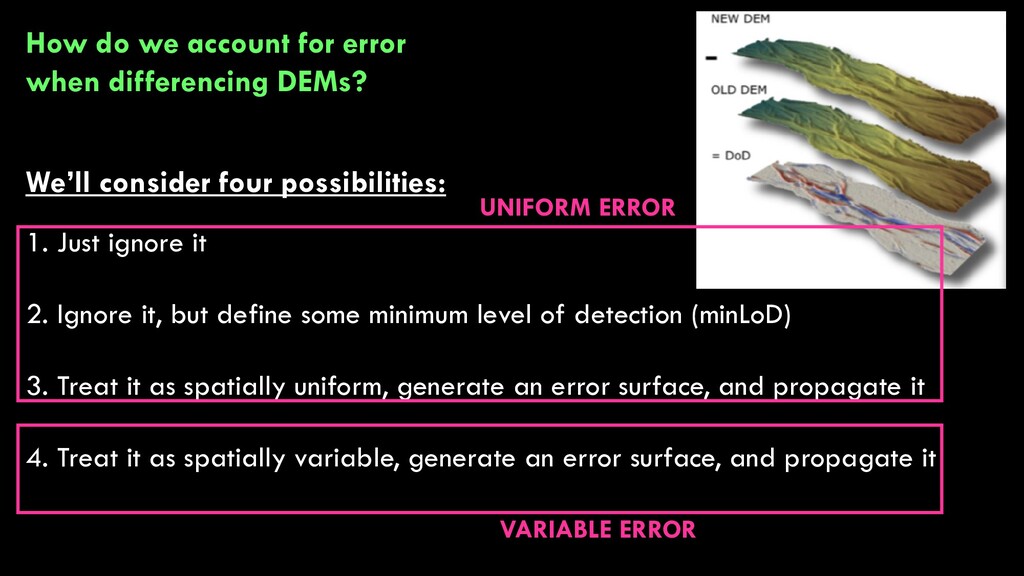
+3 m ± 2 m -1 m ± 2 m -7 m ± 2 m +7 m ± 2 m How do we account for error when differencing DEMs? We’ll consider four possibilities: 1. Just ignore it 2. Ignore it, but define some minimum level of detection (minLoD) 3. Treat it as spatially uniform, generate an error surface, and propagate it 4. Treat it as spatially variable, generate an error surface, and propagate it
THE NEW DEM 7 m ± 2 m 23 m ± 2 m 10 m ± 2 m 11 m ± 2 m 10 m ± 2 m 3 m ± 2 m 18 m ± 2 m 22 m ± 2 m -3 m ± 2 m +1 m ± 2 m +7 m ± 2 m -7 m ± 2 m TOTAL “SEDIMENT BUDGET” IS -3 + 7 - 7 + 1 = -2 m3 ± 2 m3 How do we account for error when differencing DEMs? Option 1. Ignore it
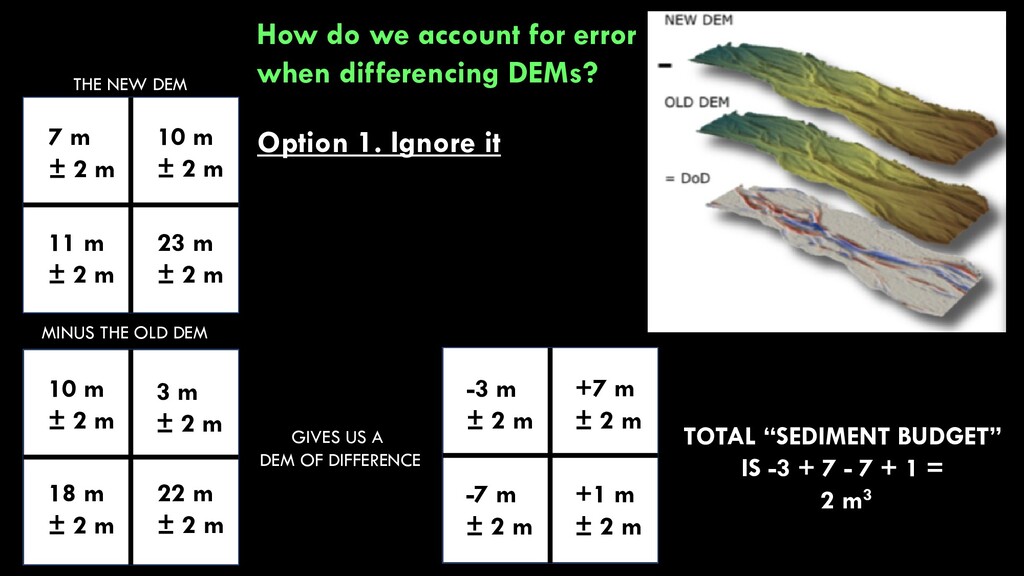
THE NEW DEM 7 m ± 2 m 23 m ± 2 m 10 m ± 2 m 11 m ± 2 m 10 m ± 2 m 3 m ± 2 m 18 m ± 2 m 22 m ± 2 m -3 m ± 2 m +1 m ± 2 m +7 m ± 2 m -7 m ± 2 m TOTAL “SEDIMENT BUDGET” IS -3 + 7 - 7 + 1 = 2 m3 How do we account for error when differencing DEMs? Option 1. Ignore it
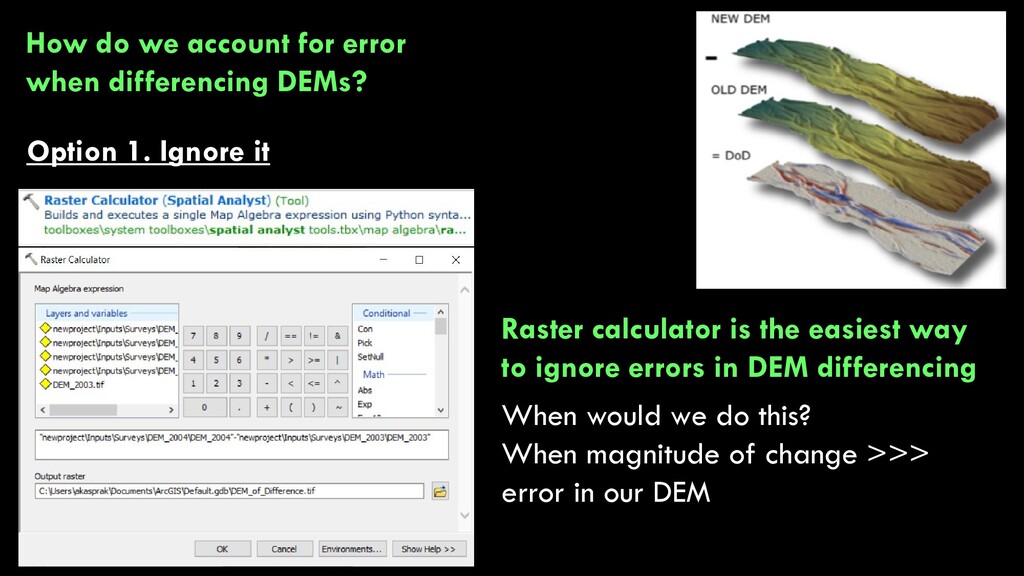
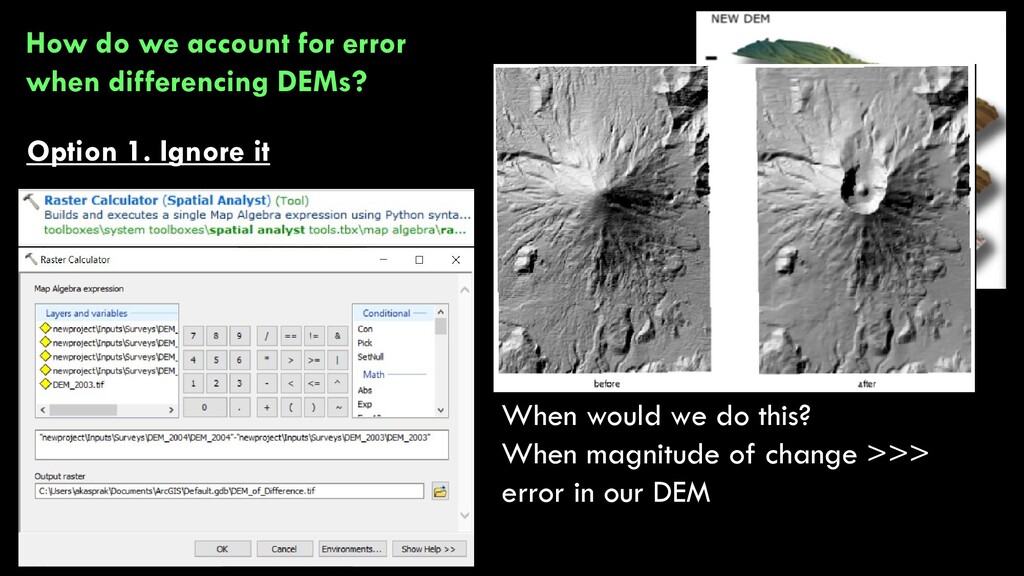
+3 m ± 2 m -1 m ± 2 m -7 m ± 2 m +7 m ± 2 m How do we account for error when differencing DEMs? Option 1. Ignore it Raster calculator is the easiest way to ignore errors in DEM differencing When would we do this? When magnitude of change >>> error in our DEM
+3 m ± 2 m -1 m ± 2 m -7 m ± 2 m +7 m ± 2 m How do we account for error when differencing DEMs? Option 1. Ignore it Raster calculator is the easiest way to ignore errors in DEM differencing When would we do this? When magnitude of change >>> error in our DEM
+3 m ± 2 m -1 m ± 2 m -7 m ± 2 m +7 m ± 2 m How do we account for error when differencing DEMs? We’ll consider four possibilities: 1. Just ignore it 2. Ignore it, but define some minimum level of detection (minLoD) 3. Treat it as spatially uniform, generate an error surface, and propagate it 4. Treat it as spatially variable, generate an error surface, and propagate it
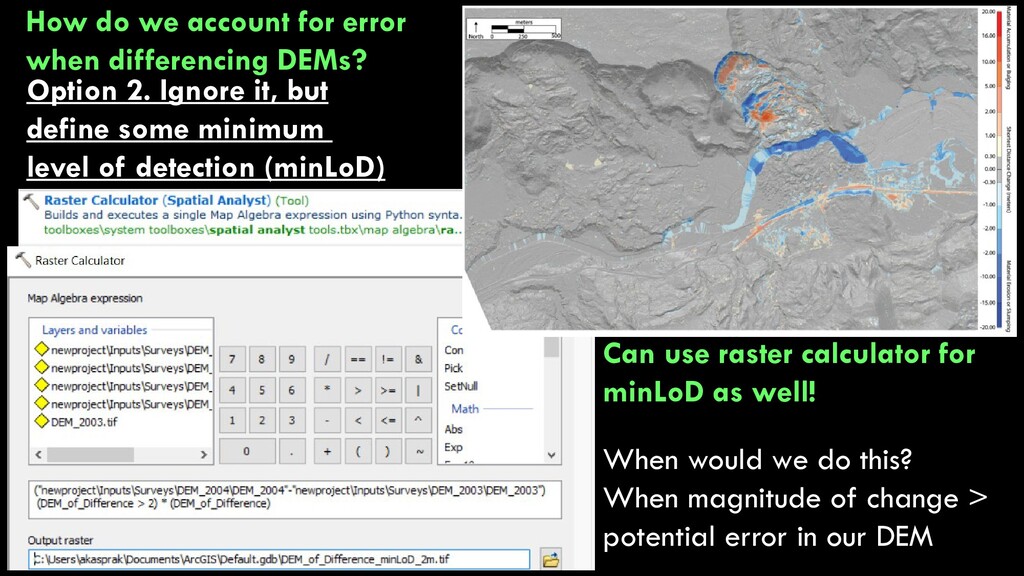
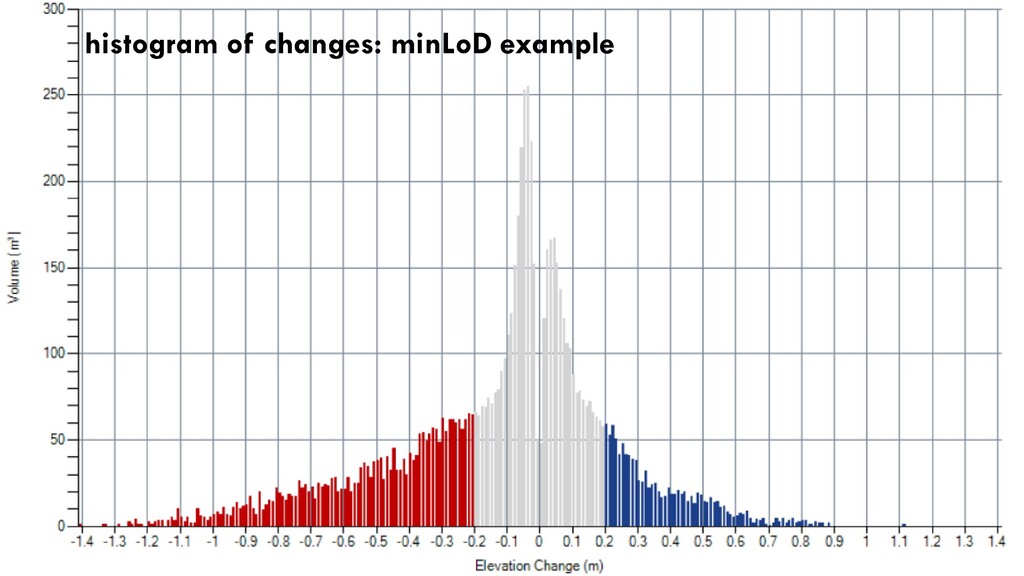
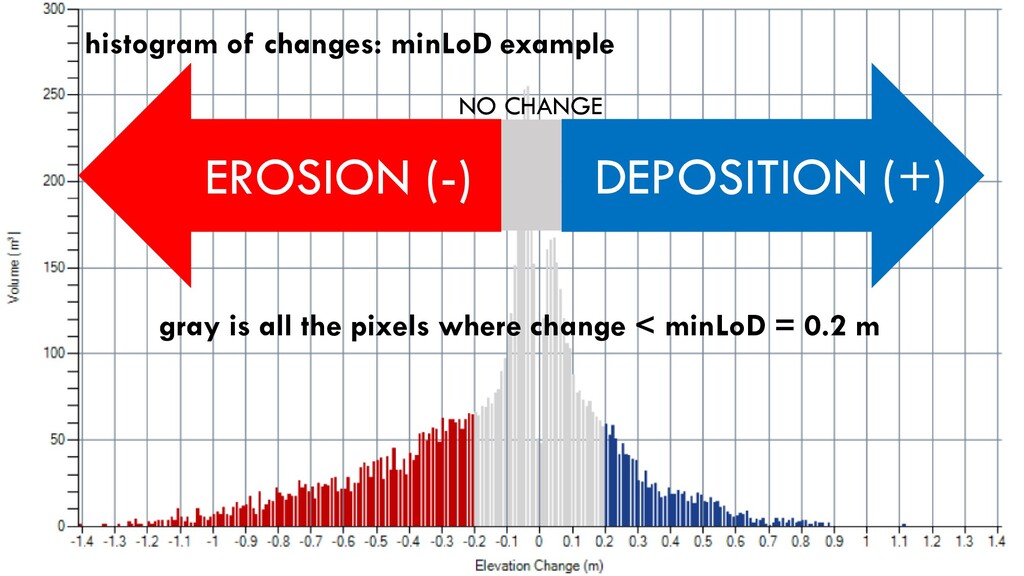
THE NEW DEM 7 m 23 m 10 m 11 m 10 m 3 m 18 m 22 m -3 m +1 m +7 m -7 m TOTAL “SEDIMENT BUDGET” IS -3 + 7 - 7 + 1 = -2 m3 How do we account for error when differencing DEMs? Option 2. Ignore it, but define some minimum level of detection (minLoD)
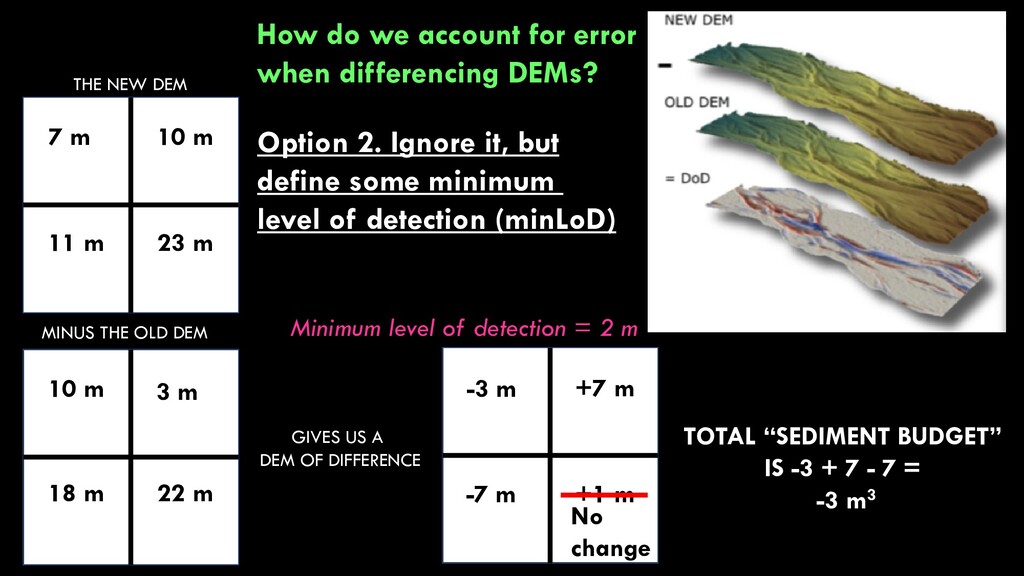
THE NEW DEM 7 m 23 m 10 m 11 m 10 m 3 m 18 m 22 m -3 m +1 m +7 m -7 m TOTAL “SEDIMENT BUDGET” IS -3 + 7 - 7 = -3 m3 How do we account for error when differencing DEMs? Option 2. Ignore it, but define some minimum level of detection (minLoD) Minimum level of detection = 2 m No change
+3 m ± 2 m -1 m ± 2 m -7 m ± 2 m +7 m ± 2 m How do we account for error when differencing DEMs? Can use raster calculator for minLoD as well! When would we do this? When magnitude of change > potential error in our DEM Option 2. Ignore it, but define some minimum level of detection (minLoD)
+3 m ± 2 m -1 m ± 2 m -7 m ± 2 m +7 m ± 2 m How do we account for error when differencing DEMs? When would we do this? When magnitude of change > potential error in our DEM Option 2. Ignore it, but define some minimum level of detection (minLoD) Can use raster calculator for minLoD as well!
+3 m ± 2 m -1 m ± 2 m -7 m ± 2 m +7 m ± 2 m How do we account for error when differencing DEMs? We’ll consider four possibilities: 1. Just ignore it 2. Ignore it, but define some minimum level of detection (minLoD) 3. Treat it as spatially uniform, generate an error surface, and propagate it 4. Treat it as spatially variable, generate an error surface, and propagate it
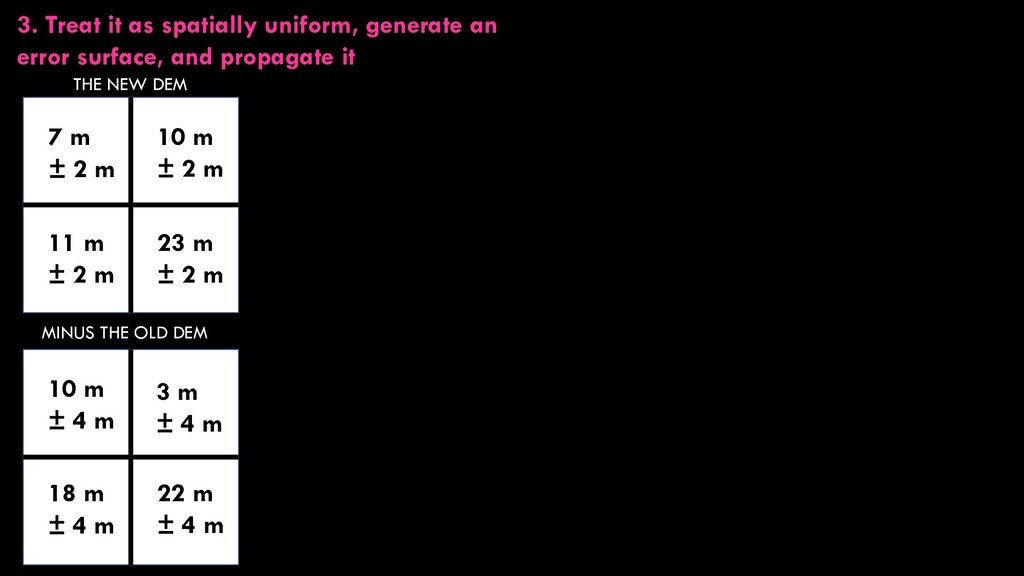
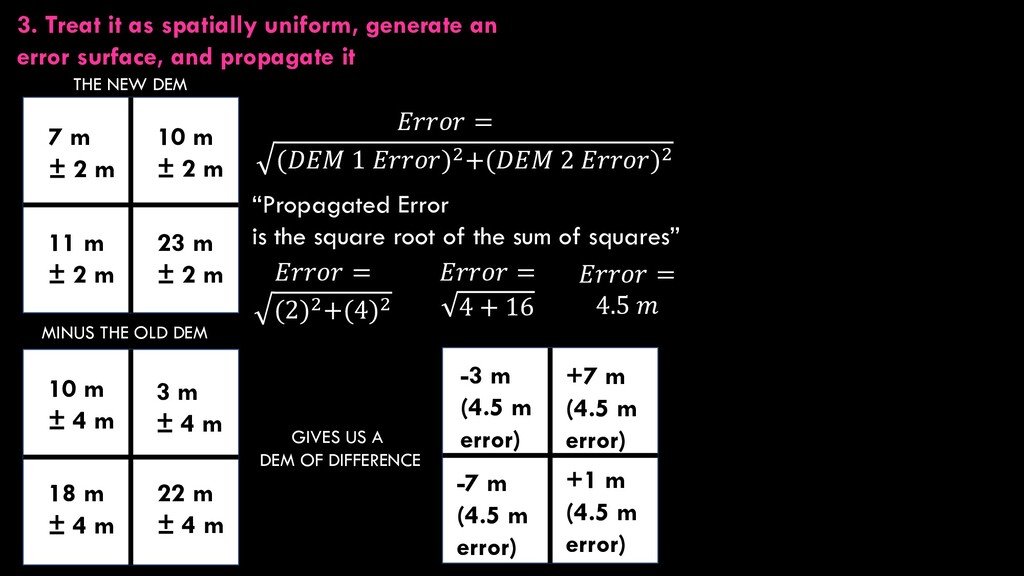
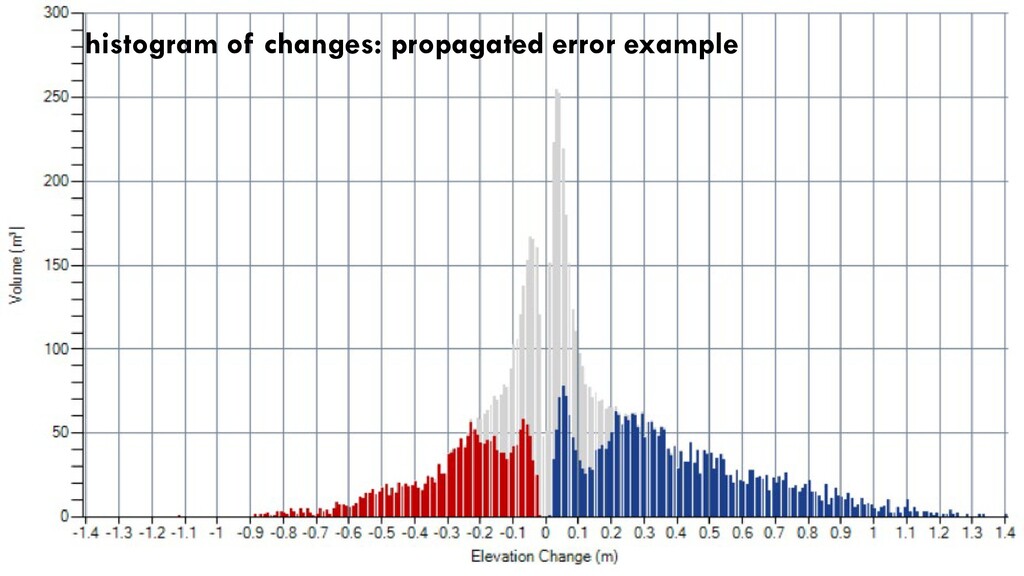
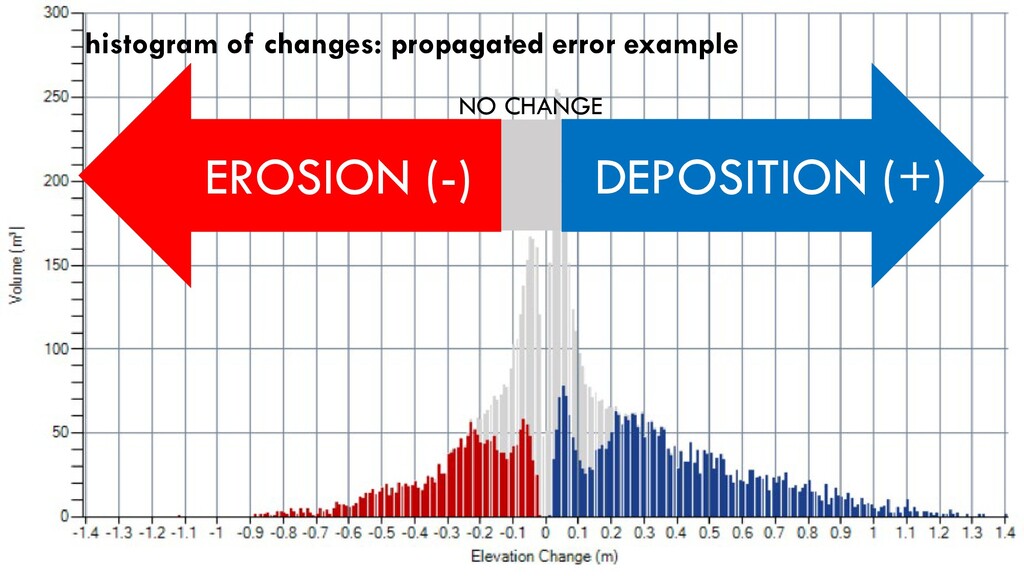
2 m 23 m ± 2 m 10 m ± 2 m 11 m ± 2 m 10 m ± 4 m 3 m ± 4 m 18 m ± 4 m 22 m ± 4 m 3. Treat it as spatially uniform, generate an error surface, and propagate it
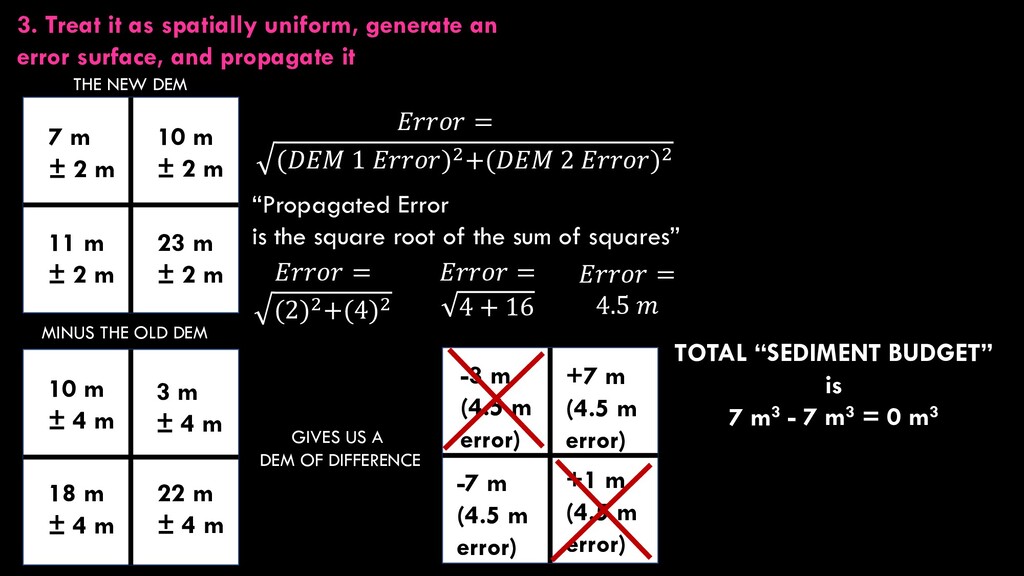
THE NEW DEM 7 m ± 2 m 23 m ± 2 m 10 m ± 2 m 11 m ± 2 m 10 m ± 4 m 3 m ± 4 m 18 m ± 4 m 22 m ± 4 m = (𝐷𝐷 1 )2+(𝐷𝐷 2 )2 “Propagated Error is the square root of the sum of squares” = (2)2+(4)2 = 4 + 16 = 4.5 3. Treat it as spatially uniform, generate an error surface, and propagate it -3 m (4.5 m error) +1 m (4.5 m error) +7 m (4.5 m error) -7 m (4.5 m error)
THE NEW DEM 7 m ± 2 m 23 m ± 2 m 10 m ± 2 m 11 m ± 2 m 10 m ± 4 m 3 m ± 4 m 18 m ± 4 m 22 m ± 4 m -3 m (4.5 m error) +1 m (4.5 m error) +7 m (4.5 m error) -7 m (4.5 m error) = (𝐷𝐷 1 )2+(𝐷𝐷 2 )2 “Propagated Error is the square root of the sum of squares” = (2)2+(4)2 = 4 + 16 = 4.5 3. Treat it as spatially uniform, generate an error surface, and propagate it TOTAL “SEDIMENT BUDGET” is 7 m3 - 7 m3 = 0 m3
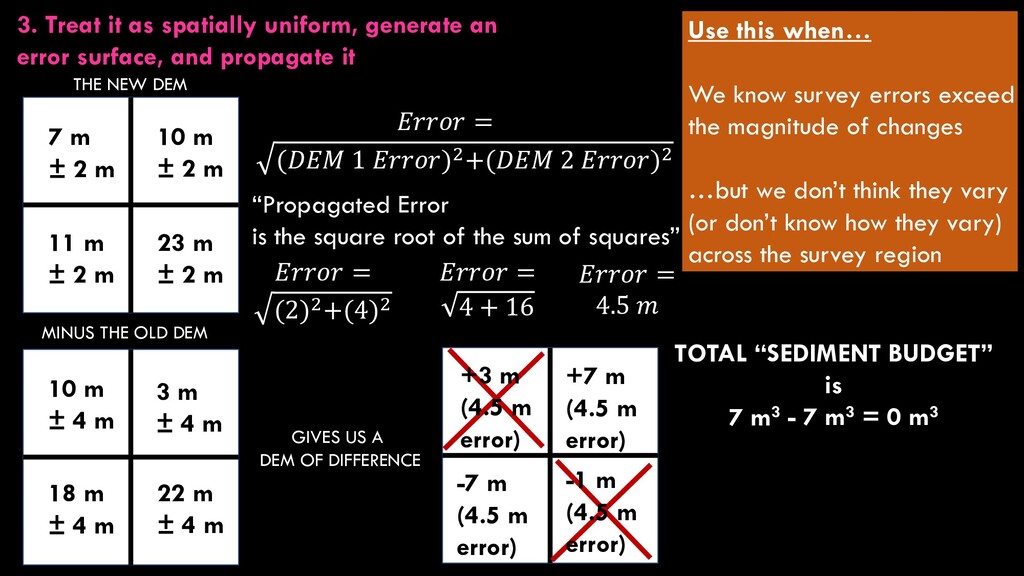
THE NEW DEM 7 m ± 2 m 23 m ± 2 m 10 m ± 2 m 11 m ± 2 m 10 m ± 4 m 3 m ± 4 m 18 m ± 4 m 22 m ± 4 m TOTAL “SEDIMENT BUDGET” is 7 m3 - 7 m3 = 0 m3 = (𝐷𝐷 1 )2+(𝐷𝐷 2 )2 “Propagated Error is the square root of the sum of squares” = (2)2+(4)2 = 4 + 16 = 4.5 Use this when… We know survey errors exceed the magnitude of changes …but we don’t think they vary (or don’t know how they vary) across the survey region 3. Treat it as spatially uniform, generate an error surface, and propagate it +3 m (4.5 m error) -1 m (4.5 m error) +7 m (4.5 m error) -7 m (4.5 m error)
+3 m ± 2 m -1 m ± 2 m -7 m ± 2 m How do we account for error when differencing DEMs? We’ll consider four possibilities: 1. Just ignore it 2. Ignore it, but define some minimum level of detection (minLoD) 3. Treat it as spatially uniform, generate an error surface, and propagate it 4. Treat it as spatially variable, generate an error surface, and propagate it
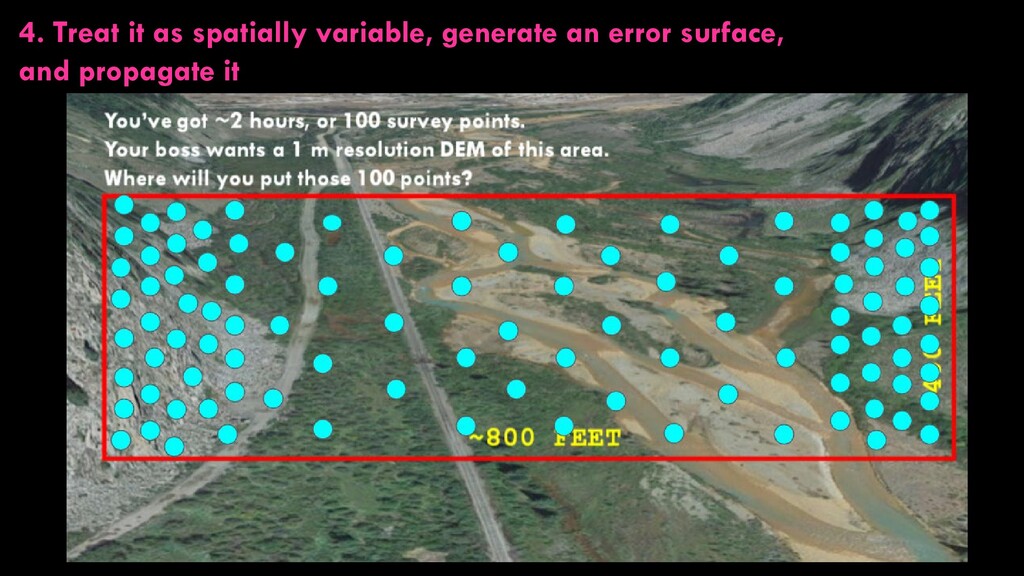
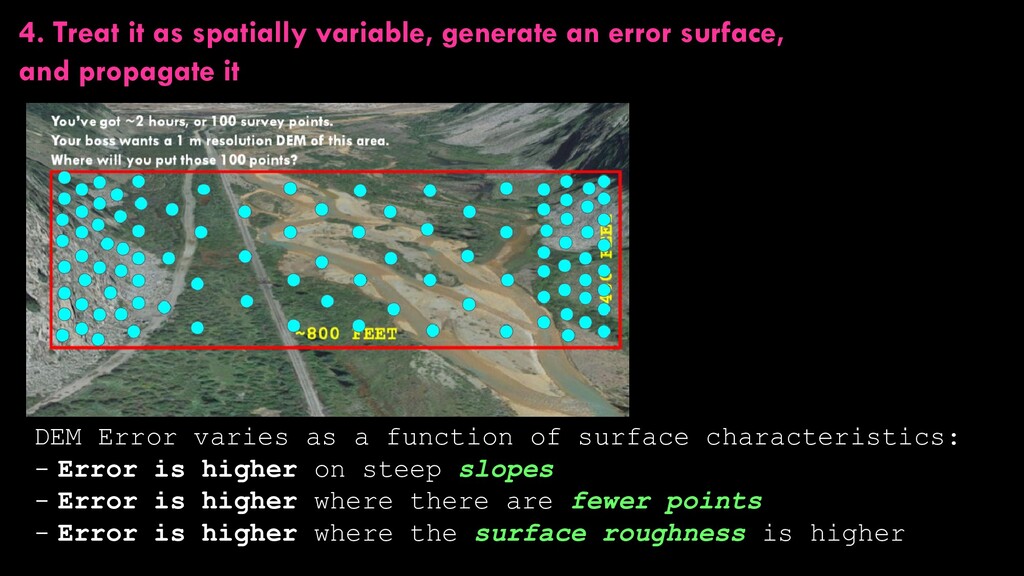
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher
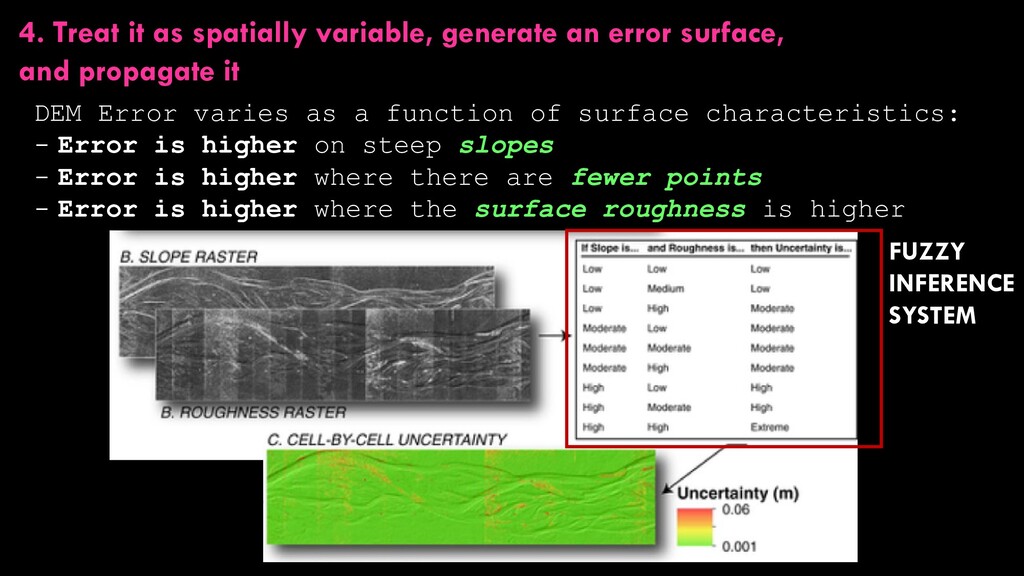
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher FUZZY INFERENCE SYSTEM
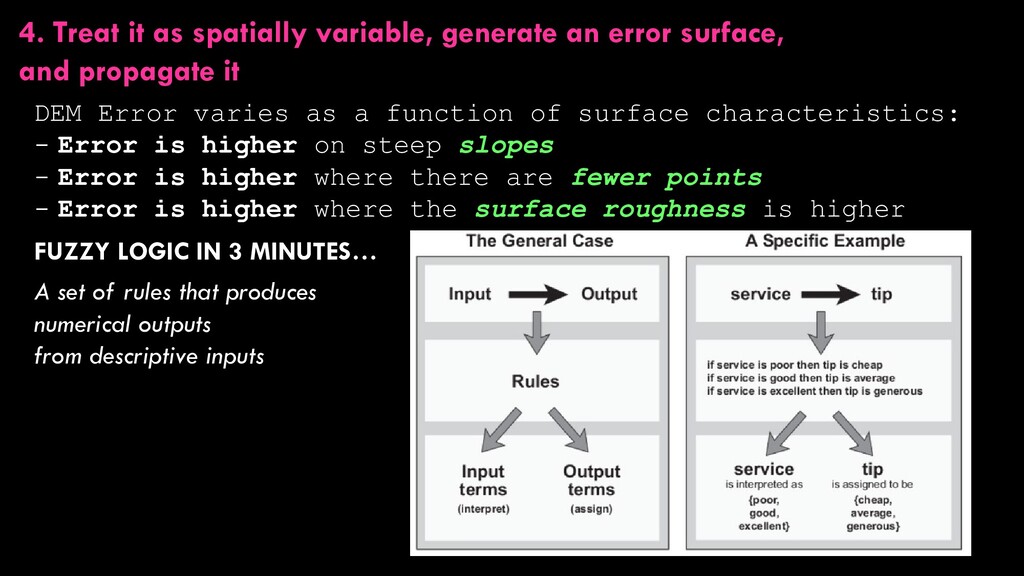
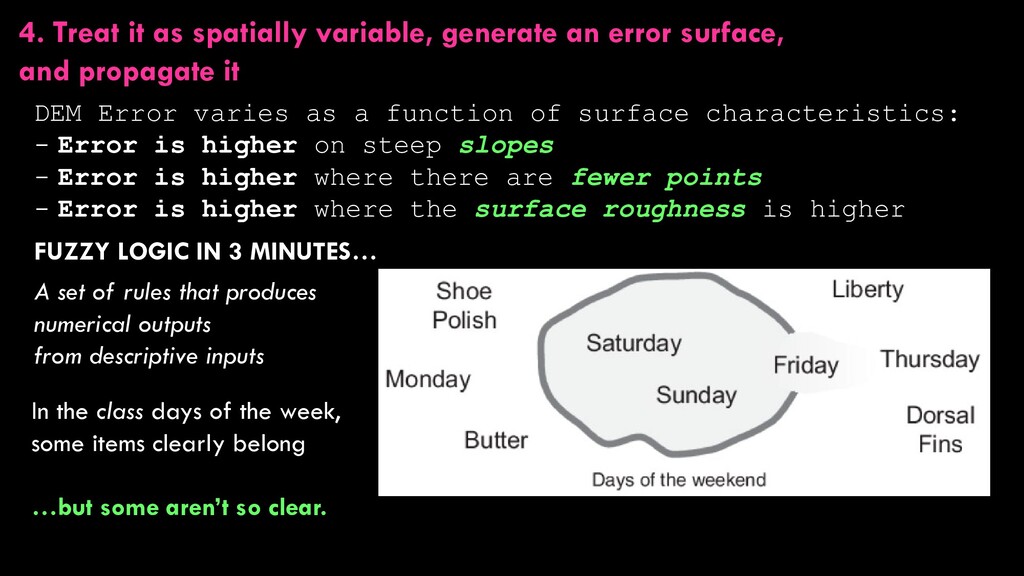
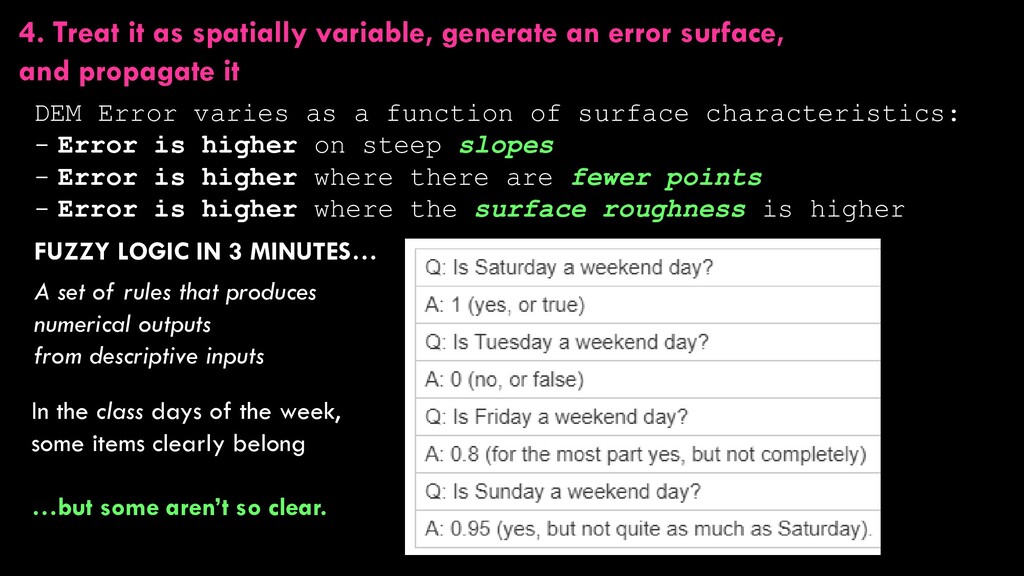
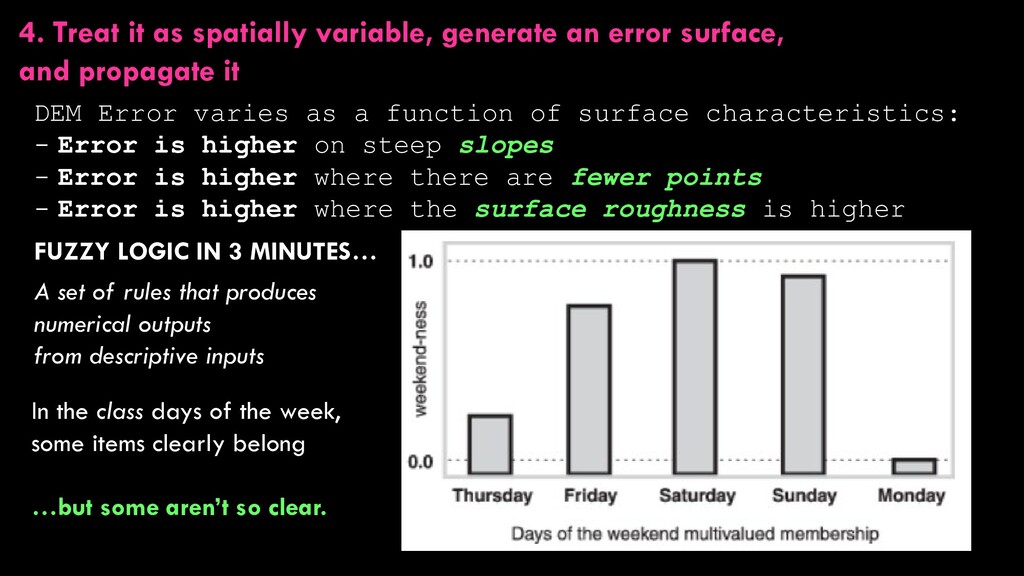
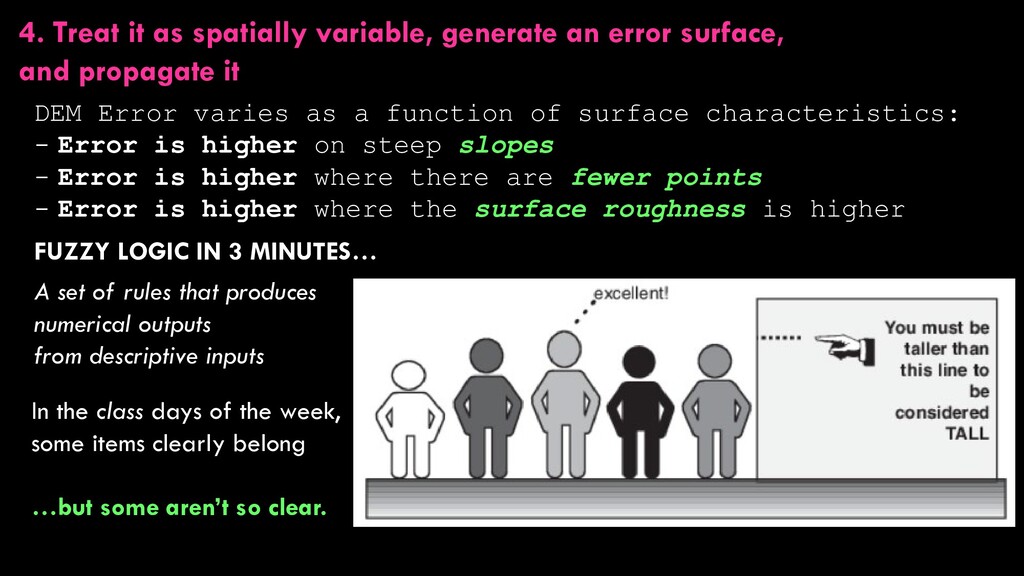
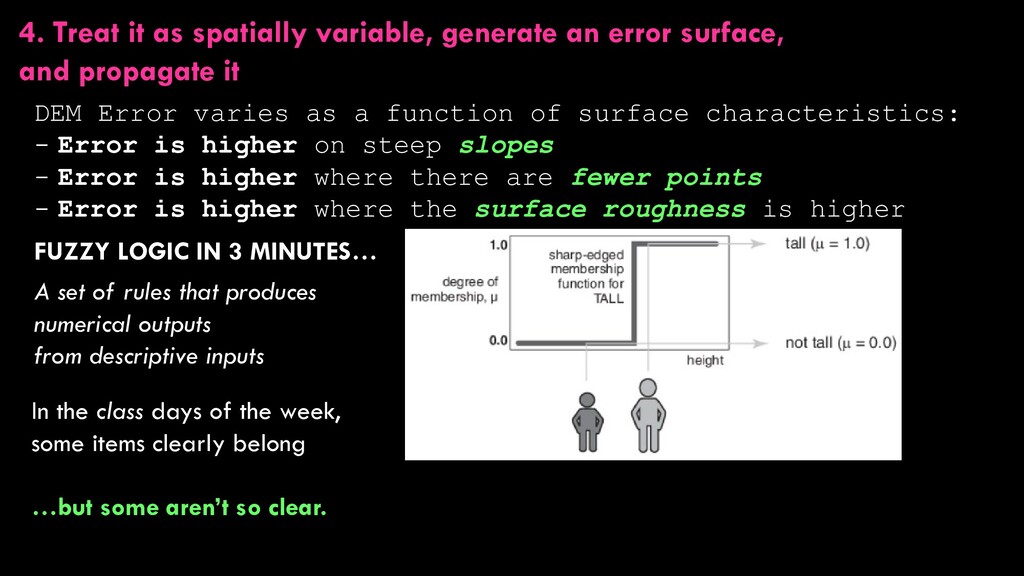
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher FUZZY LOGIC IN 3 MINUTES… A set of rules that produces numerical outputs from descriptive inputs
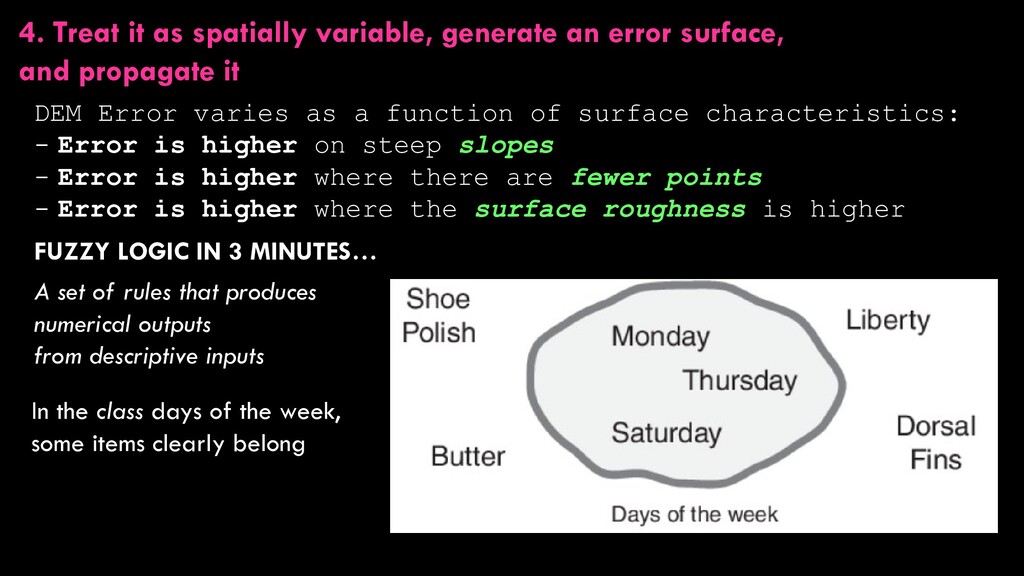
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher FUZZY LOGIC IN 3 MINUTES… A set of rules that produces numerical outputs from descriptive inputs In the class days of the week, some items clearly belong
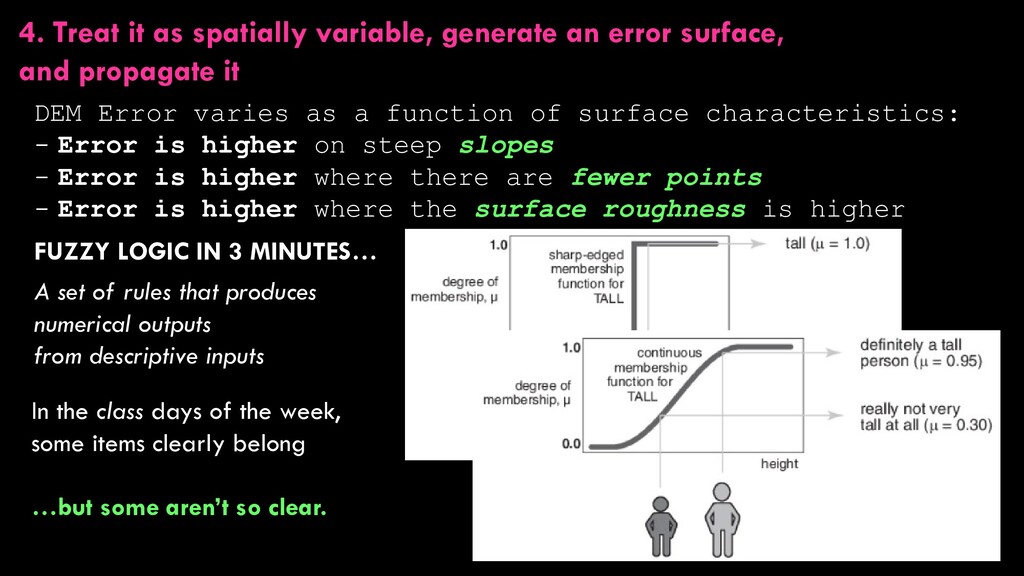
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher FUZZY LOGIC IN 3 MINUTES… A set of rules that produces numerical outputs from descriptive inputs In the class days of the week, some items clearly belong …but some aren’t so clear.
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher FUZZY LOGIC IN 3 MINUTES… A set of rules that produces numerical outputs from descriptive inputs In the class days of the week, some items clearly belong …but some aren’t so clear.
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher FUZZY LOGIC IN 3 MINUTES… A set of rules that produces numerical outputs from descriptive inputs In the class days of the week, some items clearly belong …but some aren’t so clear.
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher FUZZY LOGIC IN 3 MINUTES… A set of rules that produces numerical outputs from descriptive inputs In the class days of the week, some items clearly belong …but some aren’t so clear.
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher FUZZY LOGIC IN 3 MINUTES… A set of rules that produces numerical outputs from descriptive inputs In the class days of the week, some items clearly belong …but some aren’t so clear.
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher FUZZY LOGIC IN 3 MINUTES… A set of rules that produces numerical outputs from descriptive inputs In the class days of the week, some items clearly belong …but some aren’t so clear.
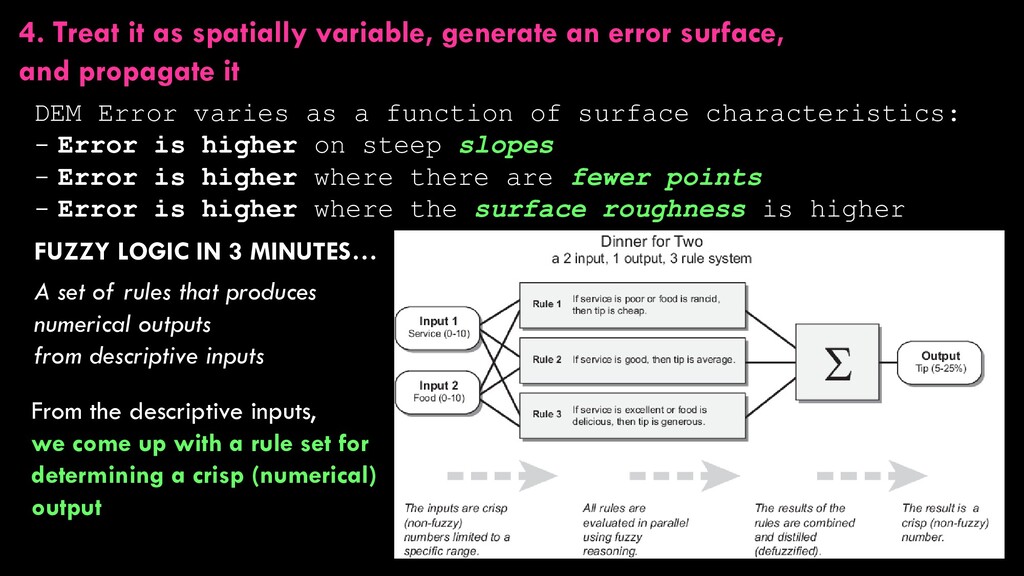
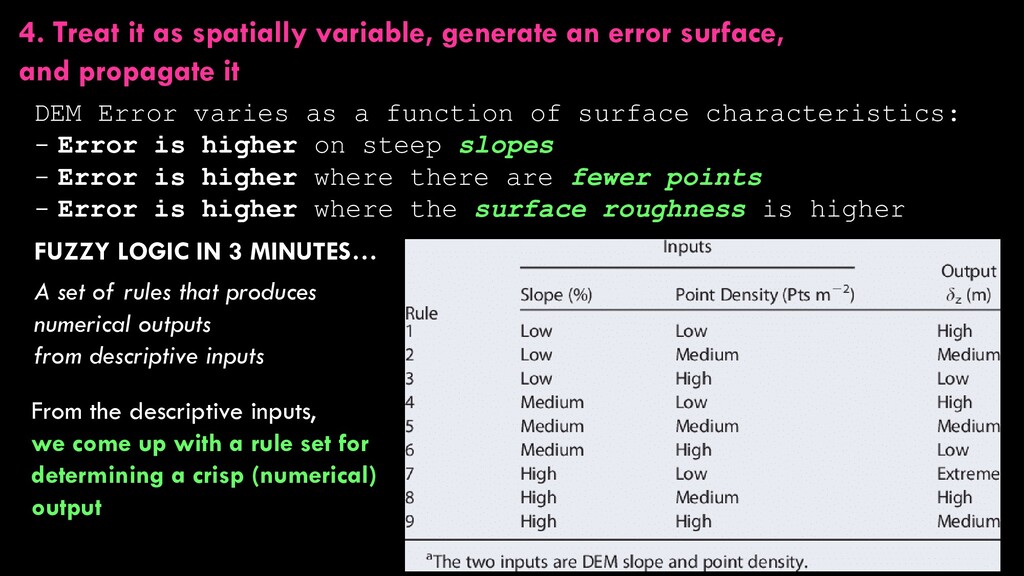
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher FUZZY LOGIC IN 3 MINUTES… A set of rules that produces numerical outputs from descriptive inputs From the descriptive inputs, we come up with a rule set for determining a crisp (numerical) output
and propagate it DEM Error varies as a function of surface characteristics: - Error is higher on steep slopes - Error is higher where there are fewer points - Error is higher where the surface roughness is higher FUZZY LOGIC IN 3 MINUTES… A set of rules that produces numerical outputs from descriptive inputs From the descriptive inputs, we come up with a rule set for determining a crisp (numerical) output
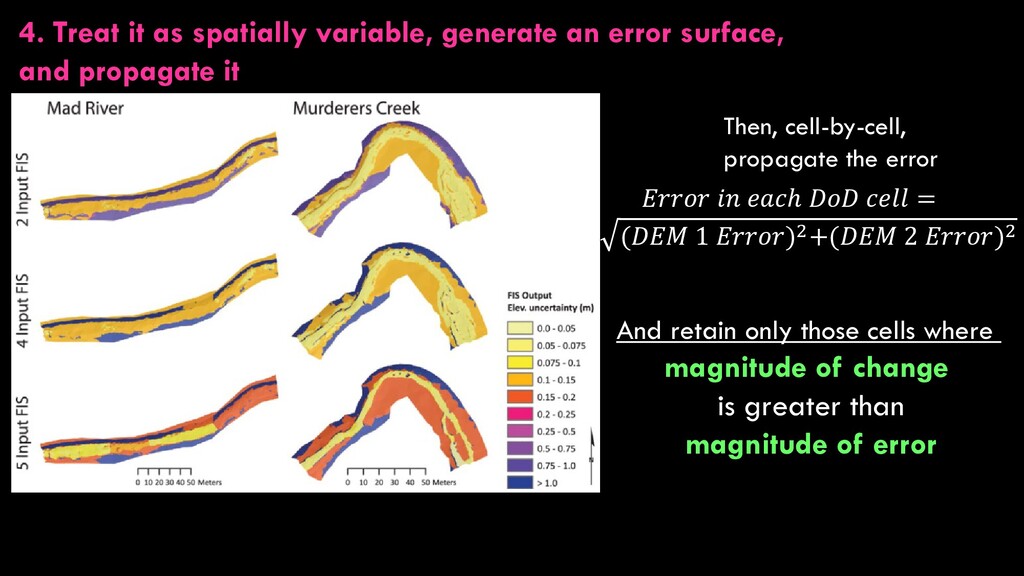
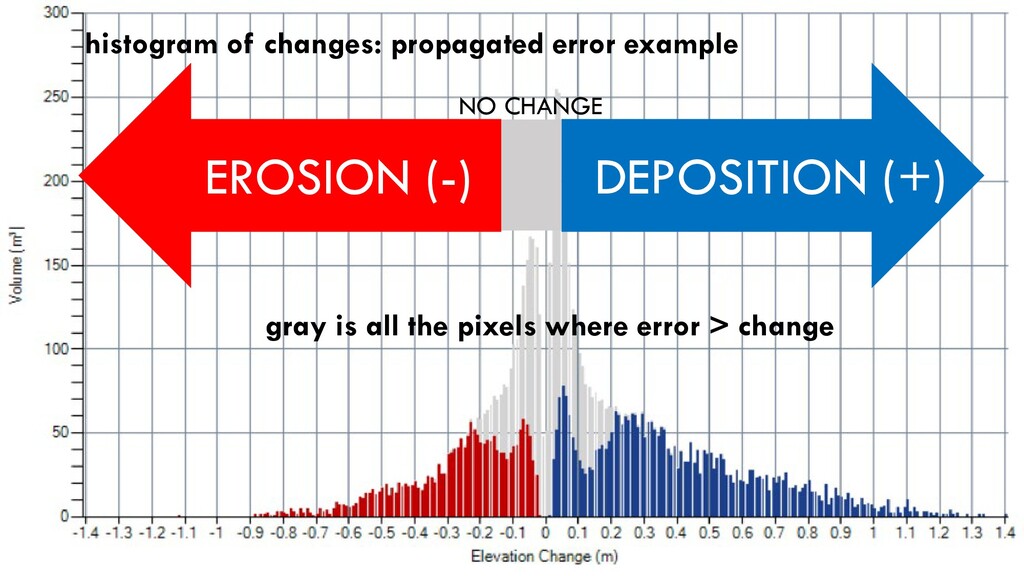
and propagate it Then, cell-by-cell, propagate the error 𝐷𝐷 𝑐𝑐𝑐𝑐 = (𝐷𝐷 1 )2+(𝐷𝐷 2 )2 And retain only those cells where magnitude of change is greater than magnitude of error
+3 m ± 2 m -1 m ± 2 m -7 m ± 2 m How do we account for error when differencing DEMs? We’ll consider four possibilities: 1. Just ignore it 2. Ignore it, but define some minimum level of detection (minLoD) 3. Treat it as spatially uniform, generate an error surface, and propagate it 4. Treat it as spatially variable, generate an error surface, and propagate it UNIFORM ERROR VARIABLE ERROR
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}