01_Mission p.6 - Mission Overview - Mission Phases - Launch - Cruise - Approach and Orbit Insertion - Aerobracking - Primary Science - Mission Objectives Summary 02_DTM p.12 03_B&W p.74 6 7 M.R.O. MARS RECONNAISSANCE ORBITER PDS_VERSION_ID = PDS3 LABEL_REVISION_NOTE = «2006-07-24, R. Sharrow, initial: 2006-12-15, S. Slavney, reformatted & revised: 2007-07-30, S. Slavney, Aerobraking subphases» RECORD_TYPE = STREAM OBJECT = MISSION MISSION_NAME = «MARS RECONNAISSANCE ORBITER» OBJECT = MISSION_INFORMATION MISSION_START_DATE = 2005-08-12 MISSION_STOP_DATE = UNK MISSION_ALIAS_NAME = «MRO» Mission Overview ======================================================================================================== The Mars Reconnaissance Orbiter spacecraft was launched from Cape Canaveral Air Force Station on 12 August 2005 aboard a Lockheed- Martin Atlas V-401 launch vehicle. After a five-month cruise and a two-month approach to Mars, MRO entered Mars’ orbit on 10 March 2006 and began aerobraking. The primary science phase began on 8 November, 2006. The primary science phase is planned to last one Mars year (approximately two Earth years), after which an extended mission may be scheduled. Note: This description has been written early in the Primary Science Phase of the MRO mission. It will be revised at least once by the end of the mission. Mission Phases ======================================================================================================== The Mars Reconnaissance Orbiter Mission is divided in time into six phases: Launch, Cruise, Approach and Orbit Insertion, Aerobraking, Primary Science, and Relay. LAUNCH ------ Launch extended from the start of the countdown to the initial acquisition, by the DSN, of the orbiter in a safe and stable configuration. The baseline launch vehicle for the MRO mission was the Lockheed-Martin Atlas V 401. This launch vehicle was selected by NASA-KSC (Kennedy Space Flight Center) via a competitive procurement under the NASA Launch Services (NLS) contract. The Atlas V 401 was a two-stage launch vehicle consisting of the Atlas Common Core Booster and a single engine Centaur upper stage. The Centaur upper stage could perform multiple restarts of its main engine. For precise pointing and control during coast and powered flight, the Centaur used a flight control system that was 3-axis stabilized. The Atlas large payload fairing was used to protect MRO during the Atlas boost phase. This fairing had a diameter of 4.2m and a length of 12.2m. The launch and injection of MRO occured during the Mars opportunity of August 2005. The Atlas booster, in combination with the Centaur upper stage, delivered the MRO spacecraft into a targeted parking orbit. After a short coast, a restart of the Centaur upper stage injected MRO onto an interplanetary transfer trajectory. Mission Phase Start Time: 2005-08-12 Mission Phase Stop Time: 2005-08-12 CRUISE ------ Duration: About five months. The cruise phase extended from DSN initial acquisition, in a safe and stable configuration, until two months prior to the Mars Orbit Insertion (MOI) maneuver. Primary activities during cruise included spacecraft and payload checkout and calibration. These activities, along with daily monitoring of orbiter subsystems, were performed in order to fully characterize the performance of the spacecraft and its payload prior to arrival at Mars. In addition, standard navigation activities were performed during this flight phase, the first being the largest TCM performed fifteen days after launch. Mission Phase Start Time: 2005-08-12 Mission Phase Stop Time: 2006-01-10 APPROACH AND ORBIT INSERTION ---------------------------- This phase extended from two months prior to Mars Orbit Insertion (MOI), through MOI, and until the orbiter was checked out and ready to begin aerobraking. The orbiter was inserted into a nearly polar orbit with a period of 35 hours. During the last sixty days of the interplanetary transit, spacecraft and ground activities were focused on the events necessary for a successful arrival and safe capture at Mars. Navigation techniques included the use of delta-DOR measurements in the orbit determination. This technique yielded a precise determination of the inbound trajectory with a series of final TCMs used to control the flight path of the spacecraft up to the MOI maneuver. Also during the approach phase, MRO performed the Optical Navigation experiment. This involved pointing the optical navigation camera (ONC) at the moons of Mars - Phobos and Deimos, and tracking their motion. By comparing the observed position of the moons to their predicted positions, relative to the background stars, the ground was able to accurately determine the position of the orbiter. Upon arrival at Mars on March 10, 2006, the spacecraft performed its MOI maneuver using its six main engines. MOI inserted the spacecraft into an initial, highly elliptical capture orbit. The delta-V required to accomplish this critical maneuver was 1015 m/s and took about 26 minutes to complete. For most of the burn, the orbiter was visible from the DSN stations. The signal was occulted as the orbiter went behind Mars, and appeared again a short time later. The reference MRO capture orbit had a period of 35 hours and a periapsis altitude of 300km. The orientation of the ascending node was 8:30 PM LMST. The capture orbit was been selected such that aerobraking would be completed prior to the start £of solar conjunction (September 23, 2006). Mission Phase Start Time: 2006-01-10 Mission Phase Stop Time: 2006-03-10 AEROBRAKING ----------- The Aerobraking Phase of the mission consisted of three sub-phases, Aerobraking Operations, Transition to PSO Operations, and Solar Conjunction. Aerobraking Operations Sub-Phase -------------------------------- One week after MOI, aerobraking operations commenced. During this time period, the orbiter used aerobraking techniques to supplement its onboard propulsive capability and to reduce its orbit period to that necessary for the primary science orbit (PSO). Aerobraking Operations consisted of a walk-in phase, a main phase, and a walkout phase, and was followed by a transition to the PSO. During the walk- in phase, the spacecraft established initial contact with the atmosphere as the periapsis altitude of the orbit was slowly lowered. The walk-in phase continued until the dynamic pressures and heating rate values required for main phase, or steady state aerobraking, were established. During the main phase of aerobraking operations, large scale orbit period reduction occurred as the orbiter was guided to dynamic pressure limits. Main phase aerobraking continued until the orbit lifetime of the orbiter reached 2 days. (Orbit lifetime is defined as the time it takes the apoapsis altitude of the orbit to decay to an altitude of 300km.) When the orbit lifetime of the orbiter reached 2 days, the walkout phase of aerobraking operations began. During the walkout phase, the periapsis altitude of the orbit was slowly increased as the 2 day orbit lifetime of the orbiter was maintained. Once the orbit of the orbiter reached an apoapsis altitude of 450km, the orbiter terminated aerobraking by propulsively raising the periapsis of its orbit out of the atmosphere. Because the PSO had nodal orientation requirements, the aerobraking phase of the MRO mission had to proceed in a timely manner and be completed near the time the desired nodal geometry was achieved. After approximately 4.5 months of aerobraking, the dynamic pressure control limits were reset such that the orbiter will fly to the desired 3:00 pm LMST nodal target. 8 9 Transition to PSO Operations Sub-Phase -------------------------------------- Once the orbit apoapsis altitude was reduced to 450 km, the orbiter terminated aerobraking by raising periapsis to a safe altitude and begin a transition to the Primary Science Phase. The periapsis of the transition orbit rotated around Mars from over the equatorial latitudes to the North Pole. When periapsis reached the North Pole, apoapsis was reduced propulsively to 255 km and orbit rotation stopped - the orbit was frozen with periapsis over the South Pole and apoapsis over the North Pole. The S A AD antenna and the CRISM cover were deployed, the instruments were checked out and remaining calibrations were performed. The payloads collected data in their normal operating modes to ensure that the end-to- end data collection and processing systems worked as planned. Solar Conjuction Sub-Phase -------------------------- Orbiter activities in preparation for science were then temporarily suspended during a four week period surrounding solar conjunction. Mission Phase Start Time: 2006-03-17 Mission Phase Stop Time: 2006-11-07 Aerobraking Operations Sub-Phase Start Time: 2006-03-17 Aerobraking Operations Sub-Phase Stop Time: 2006-09-15 Transition to PSO Operations Sub-Phase Start Time: 2006-09-15 Transition to PSO Operations Sub-Phase Stop Time: 2006-10-09 Solar Conjunction Sub-Phase Start Time: 2006-10-09 Solar Conjunction Sub-Phase Stop Time: 2006-11-07 PRIMARY SCIENCE --------------- The x 3 0 km Primary Science Orbit (PSO) is a near-polar orbit with periapsis frozen over the South Pole. It is sun-synchronous with an ascending node orientation that provides a Local Mean Solar Time (LMST) of 3:00 p.m. at the equator. Because of the eccentricity of the Mars orbit around the Sun, true solar time varies by nearly 45 minutes over the course of one Mars year.The Primary Science Phase of the mission began after solar conjunction and after turn-on and checkout of the science instruments in the Primary Science Orbit. The phase started on 8 November 2006, wil extend for one Mars year, and will conclude prior the next solar conjunction near the end of 2008. The science investigations are functionally divided into daily global mapping and profiling, regional survey, and globally distributed targeting investigations. The global mapping instruments are the MCS and the MARCI. The targeted investigations are i IS , C ISM, and CT . The survey investigations are C ISM and CT (in survey modes), and S A AD. The global mapping instruments require nadir pointing, low data rate, and continuous or near-continuous operations. The global mapping investigations are expected to use less than 5% of the expected downlink data volume. The targeted and survey instruments are high data rate instruments and will require precise targeting in along-track timing and/or cross-track pointing for short periods of time over selected portions of the surface. It is expected that more than 95% of the available downlink data volume will be used for targeted and survey investigations. All instruments can take data simultaneously. Toward the end of the primary science phase, other Mars missions launched in the 2007 opportunity will begin to arrive. Phoenix, the first of the Mars Program s Scout missions has been selected to launch in the 00 Mars opportunity. Phoenix, a lander mission that will collect and analyze subsurface ice and soil material, will arrive in late May 00 . Phoenix will need M O to characterize its prime landing site choices early in the Primary Science Phase. MRO will provide relay support for Entry, Descent, and Landing (EDL) activities and for telecommunications late in the PSP after Phoenix arrives at Mars. Phoenix and M O will also coordinate some observations to maximize science return to the Mars Exploration Program. Another mission, the Mars Science Laboratory (MSL) is currently proposed for launch in 2009, with arrival in 2010, during the MRO Relay Phase. MSL will need M O to provide and characterize candidate landing sites using observations taken during the M O PSP. (Final certification of the prime MSL landing sites may require limited observations by the science payload in 00 during the elay phase. owever, this has not been committed to by M O) M O will also provide EDL support and relay telecommunications for MSL. During the primary science phase, periodic instrument calibrations will be performed to verify the measurement characteristics, stability and health of the instruments. At the conclusion of the Primary Science Phase, these calibrations will be repeated, so that the final instrument characteristics are known. NASA may approve, as resources and on-orbit capability permit, continuation of science observations beyond the Primary Science Phase until end of the Relay Phase (also End of Mission). The orbiter will remain in the Primary Science Orbit during the Relay Phase. Mission Phase Start Time: 2006-11-08 Mission Phase Stop Time: 2008-11-09 RELAY ----- MRO will provide critical relay support to missions launched as part of the Mars Exploration Program after MRO. For spacecraft launched in the 2007 opportunity, this relay support will occur before the end of the MRO Primary Science Phase. Following completion of the Primary Science Phase, MRO will continue to provide critical relay support for Mars missions until its end of mission. hile all of the missions that M O will support have not yet been selected, Phoenix, the first of the Mars Program’s Scout missions has been selected to launch in the 2007 Mars opportunity. Phoenix, a lander mission that will collect and analyze soil samples, will arrive in late May 00 . It will need science imaging support for site characterization and selection and relay support for its ntry, Descent and Landing activities and for its science data return. Another mission, the Mars Science Laboratory (MSL) is proposed for the 2009 Mars opportunity. MSL will also need science imaging support for site characterization and selection and relay support for DL and science data return. The M O Mission Plan describes the generic support activities for any mission as well as current early planning in support of Phoenix and MSL. Activities regarding site characterization and selection will be described as part of the Primary Science Phase, and activities regarding relay support will be described as part of the Relay Phase. The orbiter has been designed to carry enough propellant to remain operational for 5 years beyond the end-of-mission (EOM) on December 31, 2010 to support future MEP missions. As this is beyond the EOM, no activities have been planned for this time period. To ensure that the orbiter remains in a viable orbit during this time, its orbit altitude will be increased at EOM to about 20 km inside the orbit of the Mars Global Surveyor spacecraft. The MRO approach to planetary protection differs from any previous Mars orbiter. The NASA requirements for planetary protection, NPG8020.12B, allow a class III mission, like MRO, to use either the ‘probability of impact/orbit lifetime’ or a ‘total bio burden’ approach. Implementing the Level 1 MRO requirements with the instruments selected via the NASA AO requires low orbits whose lifetimes are incompatible with a ‘probability of impact/orbit lifetime’ approach to Planetary Protection. Therefore, MRO is implementing the requirements of NPG8020.12B using the ‘total bio-burden’ approach. This approach has been documented in the MRO Planetary Protection Plan (D-23711). The details of cleaning requirements are documented in the MRO Planetary Protection Implementation Plan, MRO 212-11, JPL D-22688. The MRO launch targets will be biased away from a direct intercept course with Mars to ensure a less than 1 in 10,000 chance of the launch vehicle upper stage entering Mars atmosphere. The End-of-Mission (EOM) is planned for December 31, 2010 just prior to the third solar conjunction of the mission. The orbiter will perform a propulsive maneuver to place itself in a higher orbit to increase the orbit lifetime and enable extended mission operations. Mission Phase Start Time: 2008-11-09 Mission Phase Stop Time: 2010-12-31 MISSION_OBJECTIVES_SUMMARY -------------------------- The driving theme of the Mars Exploration Program is to understand the role of water on Mars and its implications for possible past or current biological activity. The Mars Reconnaissance Orbiter (MRO) Project will pursue this ‘Follow-the-Water’ strategy by conducting remote sensing observations that return sets of globally distributed data that will: 1) advance our understanding of the current Mars climate, the processes that have formed and modified the surface of the planet, and the extent to which water has played a role in surface processes; 2) identify sites of possible aqueous activity indicating environments that may have been or are conducive to biological activity; and 3) thus identify and characterize sites for future landed missions. The M O payload is designed to conduct remote sensing science observations, identify and characterize sites for future landers, and provide critical telecom/navigation relay capability for follow-on missions. The mission will provide global, regional survey, and targeted observations from a low 255 km by 320 km Mars orbit with a 3:00 P.M. local mean solar time (ascending node). During the one Martian year (687 Earth days) primary science phase, the orbiter will acquire visual and near-infrared high- resolution images of the planet’s surface, monitor atmospheric weather and climate, and search the upper crust for evidence of water. After this science phase is completed, the orbiter will provide telecommunications support for spacecraft launched to Mars in the 2007 and 2009 opportunities. The primary mission will end on December 31, 2010, approximately 5.5 years after launch. 13 DTM -------------------------------------------------------------------------- - ESP_039502_1380 / ESP_039779_1380 14 - ESP_043742_1800 / ESP_043597_1800 16 - ESP_014114_1665 / PSP_005148_1665 18 - ESP_028532_1790 / ESP_028387_1790 20 - PSP_005813_2150 / PSP_005879_2150 22 - ESP_028855_2045 / ESP_020297_2045 24 - ESP_025366_2305 / ESP_025498_2305 26 - ESP_034082_2260 / ESP_033014_2260 28 - ESP_019590_2265 / ESP_020078_2265 30 - ESP_035690_2240 / ESP_035189_2240 32 - ESP_037948_1645 / ESP_038291_1645 34 - ESP_026461_2080 / ESP_026738_2080 36 - ESP_028719_2290 / ESP_037646_2290 38 - ESP_023531_1840 / ESP_023953_1840 40 - ESP_027802_1685 / ESP_028501_1685 42 - ESP_026076_2320 / ESP_026419_2320 44 - ESP_025735_2185 / ESP_025801_2185 46 - PSP_001521_2025 / PSP_001719_2025 48 - PSP_003543_1910 / PSP_003398_1910 50 - PSP_010597_1470 / PSP_007380_1470 52 - ESP_012991_1335 / ESP_013624_1335 54 - PSP_004052_2045 / ESP_012873_2045 56 - PSP_005837_1965 / PSP_005903_1965 58 - ESP_024234_1755 / ESP_024300_1755 60 - ESP_014011_1315 / ESP_014288_1315 62 - ESP_014081_1440 / ESP_014147_1440 64 - PSP_002118_1510 / PSP_003608_1510 66 - PSP_009689_2645 / PSP_010084_2645 68 - PSP_005811_1470 / PSP_006668_1470 70 - ESP_034240_2275 / ESP_033950_2275 72 16 17 500 meters PROJECT NAME S. ainza Crater 3 00 S HIRISE SOURCE IMAGES ESP_043742_1800 ESP_043597_1800 TECHNICAL CONTACT INFORMATION NAME WILLIAM YINGLING INSTITUTION UNIVERSITY OF ARIZONA Products are tied to MOLA elevations. Elevation range for this project: VALID_MINIMUM = -2175.45 m VALID_MAXIMUM = -1338.00 m SOCET SET NGATE was used to extract terrain. Post spacing in DTM is 1 m. NOTE: Total RMS ==> 0.31133 pixels RMS x ==> 0.2042 RMS y ==> 0.025175 MS z 1 . Total RMS ==> 18.262 Mean difference from MOLA -1.01 meters, standard deviation 5.26. ---------------------------------------------------------------- Figure of Merit (FOM) Map The FOM Map (DTF...JP2) shows stereo correlation quality for each pixel (elevation post) in the DTM. The quality categories are identifed in the legend file FOM MAP L ND. P . Figure of merit (FOM) values are automatically collected by SOCET SET 5.x as part of the stereo correlation for the output DTM. These values are then simplified into a more generically defined value based on the Lunar Mapping and Modeling Project (LMMP ) Confidence Map categories. SOCET Set (FOM) values FOM Map Color Category Description ------------ ------------- ------------------- 1 Black No data, outside boundary 2 Dark Blue Shadow (if designated as such) 3,5-20,28,31-39 Orange Suspicious (edge, corner, did not correlate, other bad value, derived from seed DTM) 4,30 Red Interpolated/extrapolated (e.g. from neighbor pixels) 21 Pink Saturated (in source images) 22-27,29 Cyan Manually edited/interpolated or smoothed 40-59 Yellow Low end of good correlation range 60-99 Sea Green Good correlation The FOM map shows the color-coded categories draped over a shaded relief map. ----------------------------------------------------------------------------- KNOWN ARTIFACTS These are known artifacts present in some, but not all, i IS DTMs. They may not be present in this DTM! Look at the terrain shaded relief to detect these before using the DTM! - Boxes Some DTMs have square areas that are usually about .5-1 m different in elevation from the surrounding areas. These are artifacts of the processing algorithms used in Socet Set ((c) BAE Systems). There may be goups of these boxes. They are almost impossible to edit, so the user should look for such artifacts in a terrain shaded relief map before using the DTM for analysis. - CCD seams A i IS image is made up of 10 individual images, stitched together along their long edges. In a DTM, these seams can be visible as long lines. These seams are difficult to remove. - Faceted areas Areas that were very bland (low contrast) or deeply shadowed with low contrast and low signal may have a «faceted» look to them. Terrain in these areas is not trustworthy. END Latitude (center) -0.18° Longitude (center) 355.6° Map scale 1.01 meter/pixel North azimuth 270° S.Xainza Crater ESP_043742_1800 / ESP_043597_1800 18 19 500 meters PROJECT NAME Crater_Coprates_Chasma_3038E_138S HIRISE SOURCE IMAGES ESP_014114_1665 PSP_005148_1665 TECHNICAL CONTACT INFORMATION NAME AARON KILGALLON INSTITUTION UNIVERSITY OF ARIZONA Products are tied to MOLA elevations. Elevation range for this project: VALID_MINIMUM = -4156.51 m VALID_MAXIMUM = 2507.40 m SOCET SET NGATE was used to extract terrain. Post spacing in DTM is 2 m. NOTE: Total RMS ==> 0.26331 pix RMS x ==> 0.34447 RMS y ==> 0.039365 MS z .3 3 Total RMS ==> 2.3749 Mean difference from MOLA -1.40 m, standard deviation 8.94 m. ------------------------------------------------------------- Figure of Merit (FOM) Map The FOM Map (DTF...JP2) shows stereo correlation quality for each pixel (elevation post) in the DTM. The quality categories are identifed in the legend file FOM MAP L ND. P . Figure of merit (FOM) values are automatically collected by SOCET SET 5.x as part of the stereo correlation for the output DTM. These values are then simplified into a more generically defined value based on the Lunar Mapping and Modeling Project (LMMP ) Confidence Map categories. SOCET Set (FOM) values FOM Map Color Category Description ------------ ------------- ------------------- 1 Black No data, outside boundary 2 Dark Blue Shadow (if designated as such) 3,5-20,28,31-39 Orange Suspicious (edge, corner, did not correlate, other bad value, derived from seed DTM) 4,30 Red Interpolated/extrapolated (e.g. from neighbor pixels) 21 Pink Saturated (in source images) 22-27,29 Cyan Manually edited/interpolated or smoothed 40-59 Yellow Low end of good correlation range 60-99 Sea Green Good correlation The FOM map shows the color-coded categories draped over a shaded relief map. ----------------------------------------------------------------------------- KNOWN ARTIFACTS These are known artifacts present in some, but not all, i IS DTMs. They may not be present in this DTM! Look at the terrain shaded relief to detect these before using the DTM! - Boxes Some DTMs have square areas that are usually about .5-1 m different in elevation from the surrounding areas. These are artifacts of the processing algorithms used in Socet Set ((c) BAE Systems). There may be goups of these boxes. They are almost impossible to edit, so the user should look for such artifacts in a terrain shaded relief map before using the DTM for analysis. - CCD seams A i IS image is made up of 10 individual images, stitched together along their long edges. In a DTM, these seams can be visible as long lines. These seams are difficult to remove. - Faceted areas Areas that were very bland (low contrast) or deeply shadowed with low contrast and low signal may have a «faceted» look to them. Terrain in these areas is not trustworthy. END Latitude (center) -13.5° Longitude (center) 303.7° Map scale 2.02 meter/pixel North azimuth 270° Crater Coprates Chasma ESP_014114_1665 / PSP_005148_1665 20 21 500 meters PROJECT NAME Elysium_Vent_1598E_010S HIRISE SOURCE IMAGES ESP_028532_1790 ESP_028387_1790 TECHNICAL CONTACT INFORMATION NAME MIC A L INSTITUTION UNIVERSITY OF ARIZONA Products are tied to MOLA elevations. Elevation range for this project: VALID_MINIMUM = -2885.72 m VALID_MAXIMUM = -2469.85 m SOCET SET NGATE was used to extract terrain. Post spacing in DTM is 1 m. NOTE: Total RMS ==> 0.41523 px RMS x ==> 5.3419e-005 m RMS y ==> 3.6587e-005 m MS z 0.00 0 m Total RMS ==> 0.0020701 m Mean difference from MOLA 1.2733, standard deviation 4.98. ---------------------------------------------------------- Figure of Merit (FOM) Map The FOM Map (DTF...JP2) shows stereo correlation quality for each pixel (elevation post) in the DTM. The quality categories are identifed in the legend file FOM MAP L ND. P . Figure of merit (FOM) values are automatically collected by SOCET SET 5.x as part of the stereo correlation for the output DTM. These values are then simplified into a more generically defined value based on the Lunar Mapping and Modeling Project (LMMP ) Confidence Map categories. SOCET Set (FOM) values FOM Map Color Category Description ------------ ------------- ------------------- 1 Black No data, outside boundary 2 Dark Blue Shadow (if designated as such) 3,5-20,28,31-39 Orange Suspicious (edge, corner, did not correlate, other bad value, derived from seed DTM) 4,30 Red Interpolated/extrapolated (e.g. from neighbor pixels) 21 Pink Saturated (in source images) 22-27,29 Cyan Manually edited/interpolated or smoothed 40-59 Yellow Low end of good correlation range 60-99 Sea Green Good correlation The FOM map shows the color-coded categories draped over a shaded relief map. ----------------------------------------------------------------------------- KNOWN ARTIFACTS These are known artifacts present in some, but not all, i IS DTMs. They may not be present in this DTM! Look at the terrain shaded relief to detect these before using the DTM! - Boxes Some DTMs have square areas that are usually about .5-1 m different in elevation from the surrounding areas. These are artifacts of the processing algorithms used in Socet Set ((c) BAE Systems). There may be goups of these boxes. They are almost impossible to edit, so the user should look for such artifacts in a terrain shaded relief map before using the DTM for analysis. - CCD seams A i IS image is made up of 10 individual images, stitched together along their long edges. In a DTM, these seams can be visible as long lines. These seams are difficult to remove. - Faceted areas Areas that were very bland (low contrast) or deeply shadowed with low contrast and low signal may have a «faceted» look to them. Terrain in these areas is not trustworthy. END Latitude (center) -1.05° Longitude (center) 159.7° Map scale 1.01 meter/pixel North azimuth 270° Elysium Vent ESP_028532_1790 / ESP_028387_1790 22 23 500 meters Explosion Crater Hrad Vallis PSP_005813_2150 / PSP_005879_2150 PROJECT NAME xplosion Crater rad Vallis 141 34 N HIRISE SOURCE IMAGES PSP_005813_2150 PSP_005879_2150 TECHNICAL CONTACT INFORMATION NAME ALLISON M. MCGRAW INSTITUTION UNIVERSITY OF ARIZONA Products are tied to MOLA elevations. Elevation range for this project: VALID_MINIMUM = -4099.76 m VALID_MAXIMUM = -3930.38 m SOCET SET NGATE was used to extract terrain. Post spacing in DTM is 1 m. NOTE: Total RMS ==> 0.24316 px RMS x ==> 0.00037456 m RMS y ==> 0.00053967 m MS z 0.0 1 m Total RMS ==> 0.067122 m Mean difference from MOLA 0.67 m, standard deviation 2.88. ---------------------------------------------------------- Figure of Merit (FOM) Map The FOM Map (DTF...JP2) shows stereo correlation quality for each pixel (elevation post) in the DTM. The quality categories are identifed in the legend file FOM MAP L ND. P . Figure of merit (FOM) values are automatically collected by SOCET SET 5.x as part of the stereo correlation for the output DTM. These values are then simplified into a more generically defined value based on the Lunar Mapping and Modeling Project (LMMP ) Confidence Map categories. SOCET Set (FOM) values FOM Map Color Category Description ------------ ------------- ------------------- 1 Black No data, outside boundary 2 Dark Blue Shadow (if designated as such) 3,5-20,28,31-39 Orange Suspicious (edge, corner, did not correlate, other bad value, derived from seed DTM) 4,30 Red Interpolated/extrapolated (e.g. from neighbor pixels) 21 Pink Saturated (in source images) 22-27,29 Cyan Manually edited/interpolated or smoothed 40-59 Yellow Low end of good correlation range 60-99 Sea Green Good correlation The FOM map shows the color-coded categories draped over a shaded relief map. ----------------------------------------------------------------------------- KNOWN ARTIFACTS These are known artifacts present in some, but not all, i IS DTMs. They may not be present in this DTM! Look at the terrain shaded relief to detect these before using the DTM! - Boxes Some DTMs have square areas that are usually about .5-1 m different in elevation from the surrounding areas. These are artifacts of the processing algorithms used in Socet Set ((c) BAE Systems). There may be goups of these boxes. They are almost impossible to edit, so the user should look for such artifacts in a terrain shaded relief map before using the DTM for analysis. - CCD seams A i IS image is made up of 10 individual images, stitched together along their long edges. In a DTM, these seams can be visible as long lines. These seams are difficult to remove. - Faceted areas Areas that were very bland (low contrast) or deeply shadowed with low contrast and low signal may have a «faceted» look to them. Terrain in these areas is not trustworthy. END Latitude (center) 34.81° Longitude (center) 141.8° Map scale 1.00 meter/pixel North azimuth 270° 24 25 500 meters Mawrth Vallis ESP_028855_2045 / ESP_020297_2045 PROJECT NAME Mawrth_Vallis_3413E_242N HIRISE SOURCE IMAGES ESP_028855_2045 ESP_020297_2045 TECHNICAL CONTACT INFORMATION NAME MIC A L INSTITUTION UNIVERSITY OF ARIZONA Products are tied to MOLA elevations. Elevation range for this project: VALID_MINIMUM = -2900.50 m VALID_MAXIMUM = -2508.77 m SOCET SET NGATE was used to extract terrain. Post spacing in DTM is 1 m. NOTE: Total RMS ==> 0.23977 px RMS x ==> 1.4466 m RMS y ==> 0.86661 m MS z 1.04 m Total RMS ==> 1.5856 m Mean difference from MOLA is 0.392 m and the Std Dev is 7.544 m. ---------------------------------------------------------------- Figure of Merit (FOM) Map The FOM Map (DTF...JP2) shows stereo correlation quality for each pixel (elevation post) in the DTM. The quality categories are identifed in the legend file FOM MAP L ND. P . Figure of merit (FOM) values are automatically collected by SOCET SET 5.x as part of the stereo correlation for the output DTM. These values are then simplified into a more generically defined value based on the Lunar Mapping and Modeling Project (LMMP ) Confidence Map categories. SOCET Set (FOM) values FOM Map Color Category Description ------------ ------------- ------------------- 1 Black No data, outside boundary 2 Dark Blue Shadow (if designated as such) 3,5-20,28,31-39 Orange Suspicious (edge, corner, did not correlate, other bad value, derived from seed DTM) 4,30 Red Interpolated/extrapolated (e.g. from neighbor pixels) 21 Pink Saturated (in source images) 22-27,29 Cyan Manually edited/interpolated or smoothed 40-59 Yellow Low end of good correlation range 60-99 Sea Green Good correlation The FOM map shows the color-coded categories draped over a shaded relief map. ----------------------------------------------------------------------------- KNOWN ARTIFACTS These are known artifacts present in some, but not all, i IS DTMs. They may not be present in this DTM! Look at the terrain shaded relief to detect these before using the DTM! - Boxes Some DTMs have square areas that are usually about .5-1 m different in elevation from the surrounding areas. These are artifacts of the processing algorithms used in Socet Set ((c) BAE Systems). There may be goups of these boxes. They are almost impossible to edit, so the user should look for such artifacts in a terrain shaded relief map before using the DTM for analysis. - CCD seams A i IS image is made up of 10 individual images, stitched together along their long edges. In a DTM, these seams can be visible as long lines. These seams are difficult to remove. - Faceted areas Areas that were very bland (low contrast) or deeply shadowed with low contrast and low signal may have a «faceted» look to them. Terrain in these areas is not trustworthy. END Latitude (center) 24.2° Longitude (center) 341.2° Map scale 1.00 meter/pixel North azimuth 270° 32 33 500 meters Terraced Crater ESP_035690_2240 / ESP_035189_2240 PROJECT NAME TerracedCrater4 HIRISE SOURCE IMAGES ESP_035690_2240 ESP_035189_2240 TECHNICAL CONTACT INFORMATION NAME ALI BRAMSON INSTITUTION UNIVERSITY OF ARIZONA Products are tied to MOLA elevations. Elevation range for this project: VALID_MINIMUM = -3977.78 m VALID_MAXIMUM = -3908.78 m SOCET SET NGATE was used to extract terrain. Post spacing in DTM is 1 m. NOTE: Total RMS ==> 0.29873 px RMS x ==> 0.064115 m RMS y ==> 1.4383 m MS z 0. 1 m Total RMS ==> 0.79176 m Mean difference from MOLA -0.78 m, standard deviation 2.6. ---------------------------------------------------------- Figure of Merit (FOM) Map The FOM Map (DTF...JP2) shows stereo correlation quality for each pixel (elevation post) in the DTM. The quality categories are identifed in the legend file FOM MAP L ND. P . Figure of merit (FOM) values are automatically collected by SOCET SET 5.x as part of the stereo correlation for the output DTM. These values are then simplified into a more generically defined value based on the Lunar Mapping and Modeling Project (LMMP ) Confidence Map categories. SOCET Set (FOM) values FOM Map Color Category Description ------------ ------------- ------------------- 1 Black No data, outside boundary 2 Dark Blue Shadow (if designated as such) 3,5-20,28,31-39 Orange Suspicious (edge, corner, did not correlate, other bad value, derived from seed DTM) 4,30 Red Interpolated/extrapolated (e.g. from neighbor pixels) 21 Pink Saturated (in source images) 22-27,29 Cyan Manually edited/interpolated or smoothed 40-59 Yellow Low end of good correlation range 60-99 Sea Green Good correlation The FOM map shows the color-coded categories draped over a shaded relief map. ----------------------------------------------------------------------------- KNOWN ARTIFACTS These are known artifacts present in some, but not all, i IS DTMs. They may not be present in this DTM! Look at the terrain shaded relief to detect these before using the DTM! - Boxes Some DTMs have square areas that are usually about .5-1 m different in elevation from the surrounding areas. These are artifacts of the processing algorithms used in Socet Set ((c) BAE Systems). There may be goups of these boxes. They are almost impossible to edit, so the user should look for such artifacts in a terrain shaded relief map before using the DTM for analysis. - CCD seams A i IS image is made up of 10 individual images, stitched together along their long edges. In a DTM, these seams can be visible as long lines. These seams are difficult to remove. - Faceted areas Areas that were very bland (low contrast) or deeply shadowed with low contrast and low signal may have a «faceted» look to them. Terrain in these areas is not trustworthy. END Latitude (center) 43.83° Longitude (center) 206.1° Map scale 1.00 meter/pixel North azimuth 270° 38 39 500 meters Utopia Gullied Crater ESP_028719_2290 / ESP_037646_2290 PROJECT NAME Utopia_gullied_crater HIRISE SOURCE IMAGES ESP_028719_2290 ESP_037646_2290 TECHNICAL CONTACT INFORMATION NAME WILLIAM YINGLING INSTITUTION UNIVERSITY OF ARIZONA Products are tied to MOLA elevations. Elevation range for this project: VALID_MINIMUM = -4675.66 m VALID_MAXIMUM = -4129.23 m SOCET SET NGATE was used to extract terrain. Post spacing in DTM is 2 m. NOTE: Total RMS ==> 0.29792 px RMS x ==> 1.7732 m RMS y ==> 2.3672 m MS z .1 11 m Total RMS ==> 5.460 m Mean difference from MOLA 1.01 m, standard deviation 5.28. ---------------------------------------------------------- Figure of Merit (FOM) Map The FOM Map (DTF...JP2) shows stereo correlation quality for each pixel (elevation post) in the DTM. The quality categories are identifed in the legend file FOM MAP L ND. P . Figure of merit (FOM) values are automatically collected by SOCET SET 5.x as part of the stereo correlation for the output DTM. These values are then simplified into a more generically defined value based on the Lunar Mapping and Modeling Project (LMMP ) Confidence Map categories. SOCET Set (FOM) values FOM Map Color Category Description ------------ ------------- ------------------- 1 Black No data, outside boundary 2 Dark Blue Shadow (if designated as such) 3,5-20,28,31-39 Orange Suspicious (edge, corner, did not correlate, other bad value, derived from seed DTM) 4,30 Red Interpolated/extrapolated (e.g. from neighbor pixels) 21 Pink Saturated (in source images) 22-27,29 Cyan Manually edited/interpolated or smoothed 40-59 Yellow Low end of good correlation range 60-99 Sea Green Good correlation The FOM map shows the color-coded categories draped over a shaded relief map. ----------------------------------------------------------------------------- KNOWN ARTIFACTS These are known artifacts present in some, but not all, i IS DTMs. They may not be present in this DTM! Look at the terrain shaded relief to detect these before using the DTM! - Boxes Some DTMs have square areas that are usually about .5-1 m different in elevation from the surrounding areas. These are artifacts of the processing algorithms used in Socet Set ((c) BAE Systems). There may be goups of these boxes. They are almost impossible to edit, so the user should look for such artifacts in a terrain shaded relief map before using the DTM for analysis. - CCD seams A i IS image is made up of 10 individual images, stitched together along their long edges. In a DTM, these seams can be visible as long lines. These seams are difficult to remove. - Faceted areas Areas that were very bland (low contrast) or deeply shadowed with low contrast and low signal may have a «faceted» look to them. Terrain in these areas is not trustworthy. END Latitude (center) 48.45° Longitude (center) 89.39° Map scale 1.99 meter/pixel North azimuth 270° 60 61 500 meters MSL West Gap In Ellipse ESP_024234_1755 / ESP_024300_1755 PROJECT NAME MSL_WEST_GAP_IN_ELLIPSE HIRISE SOURCE IMAGES ESP_024234_1755 ESP_024300_1755 TECHNICAL CONTACT INFORMATION NAME USGS-ASTROGEOLOGY INSTITUTION USGS-ASTROGEOLOGY Products are tied to MOLA elevations. Elevation range for this project: VALID_MINIMUM = -4623.42 m VALID_MAXIMUM = -4226.53 m SOCET SET NGATE was used to extract terrain. Post spacing in DTM is 1 m. --------------------------- Figure of Merit (FOM) Map The FOM Map (DTF...JP2) shows stereo correlation quality for each pixel (elevation post) in the DTM. The quality categories are identifed in the legend file FOM MAP L ND. P . Figure of merit (FOM) values are automatically collected by SOCET SET 5.x as part of the stereo correlation for the output DTM. These values are then simplified into a more generically defined value based on the Lunar Mapping and Modeling Project (LMMP ) Confidence Map categories. SOCET Set (FOM) values FOM Map Color Category Description ------------ ------------- ------------------- 1 Black No data, outside boundary 2 Dark Blue Shadow (if designated as such) 3,5-20,28,31-39 Orange Suspicious (edge, corner, did not correlate, other bad value, derived from seed DTM) 4,30 Red Interpolated/extrapolated (e.g. from neighbor pixels) 21 Pink Saturated (in source images) 22-27,29 Cyan Manually edited/interpolated or smoothed 40-59 Yellow Low end of good correlation range 60-99 Sea Green Good correlation The FOM map shows the color-coded categories draped over a shaded relief map. ----------------------------------------------------------------------------- KNOWN ARTIFACTS These are known artifacts present in some, but not all, i IS DTMs. They may not be present in this DTM! Look at the terrain shaded relief to detect these before using the DTM! - Boxes Some DTMs have square areas that are usually about .5-1 m different in elevation from the surrounding areas. These are artifacts of the processing algorithms used in Socet Set ((c) BAE Systems). There may be goups of these boxes. They are almost impossible to edit, so the user should look for such artifacts in a terrain shaded relief map before using the DTM for analysis. - CCD seams A i IS image is made up of 10 individual images, stitched together along their long edges. In a DTM, these seams can be visible as long lines. These seams are difficult to remove. - Faceted areas Areas that were very bland (low contrast) or deeply shadowed with low contrast and low signal may have a «faceted» look to them. Terrain in these areas is not trustworthy. END Latitude (center) -4.64° Longitude (center) 137.2° Map scale 1.01 meter/pixel North azimuth 270° 75 B&W --------------------------------------------------------------------------------- - AEB_000002_0100 76 - ESP_011327_1980 78 - ESP_011355_1970 80 - ESP_011425_1775 82 - ESP_011436_1425 84 - ESP_011456_2160 86 - ESP_011563_2200 88 - ESP_011590_2190 90 - ESP_011595_1725 92 - ESP_011623_2100 94 - ESP_011677_1655 96 - ESP_011705_1410 98 - ESP_011732_1595 100 - ESP_011775_2230 102 - ESP_011817_1395 104 - ESP_011677_1655 106 - ESP_012234_1820 108 - ESP_012591_1275 110 - ESP_012649_1770 112 - ESP_012560_1660 114 - ESP_012753_1615 116 - ESP_012918_1450 118 - ESP_012947_1275 120 - ESP_013000_1395 122 - ESP_013045_1020 124 - ESP_013097_1850 126 - ESP_013308_1810 128 - ESP_013481_2160 130 - ESP_013955_1020 132 - ESP_014280_2000 134 80 81 Breached impact crater rim ESP_011355_1970 PDS_VERSION_ID = PDS3 Identification Information NOT_APPLICABLE_CONSTANT = -9998 DATA_SET_ID M O-M- I IS -3- D -V1.1 DATA_SET_NAME M O MA S I SOL TION IMA IN SCI NC P IM NT D V1.1 PRODUCER_INSTITUTION_NAME = «UNIVERSITY OF ARIZONA» PRODUCER_ID = «UA» PRODUCER_FULL_NAME = «ALFRED MCEWEN» OBSERVATION_ID = «ESP_011355_1970» PRODUCT_ID = «ESP_011355_1970_RED» PRODUCT_VERSION_ID = «2.0» INSTRUMENT_HOST_NAME = «MARS RECONNAISSANCE ORBITER» INSTRUMENT_HOST_ID = «MRO» INSTRUMENT_NAME I SOL TION IMA IN SCI NC P IM NT INSTRUMENT_ID I IS TARGET_NAME = «MARS» MISSION_PHASE_NAME T ND D SCI NC P AS ORBIT_NUMBER = 11355 SOURCE_PRODUCT_ID = (ESP_011355_1970_RED0_0, ESP_011355_1970_RED0_1, ESP_011355_1970_RED1_0, ESP_011355_1970_RED1_1, ESP_011355_1970_RED2_0, ESP_011355_1970_RED2_1, ESP_011355_1970_RED3_0, ESP_011355_1970_RED3_1, ESP_011355_1970_RED4_0, ESP_011355_1970_RED4_1, ESP_011355_1970_RED5_0, ESP_011355_1970_RED5_1, ESP_011355_1970_RED6_0, ESP_011355_1970_RED6_1, ESP_011355_1970_RED7_0, ESP_011355_1970_RED7_1, ESP_011355_1970_RED8_0, ESP_011355_1970_RED8_1, ESP_011355_1970_RED9_0, ESP_011355_1970_RED9_1) RATIONALE_DESC = «Breached impact crater rim» SOFTWARE_NAME = «PDS_to_JP2 v3.15.5 (1.49 2008/07/12 04:09:51)» OBJECT = IMAGE_MAP_PROJECTION ^DATA_SET_MAP_PROJECTION = «DSMAP.CAT» MAP_PROJECTION_TYPE = «EQUIRECTANGULAR» PROJECTION_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: The EQUIRECTANGULAR projection is based */ /* on the formula for a sphere. To eliminate confusion in */ /* the IMAGE_MAP_PROJECTION OBJECT we have set all three radii, */ A A IS ADI S, A A IS ADI S, and C A IS ADI S to the same /* number. The value recorded in the three radii is the local */ /* radius at the CENTER_LATITUDE on the Mars ellipsoid. That is, */ /* equatorial radius of 3396.190000 km and polar radius of */ /* 3376.200000 kilometers. Using the local radius of the */ /* ellipsoid implies that the MAP_SCALE and MAP_RESOLUTION */ /* are true at the CENTER_LATITUDE. */ A_AXIS_RADIUS = 3394.8398133163 <KM> B_AXIS_RADIUS = 3394.8398133163 <KM> C_AXIS_RADIUS = 3394.8398133163 <KM> COORDINATE_SYSTEM_NAME = PLANETOCENTRIC POSITIVE_LONGITUDE_DIRECTION = EAST KEYWORD_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: CENTER_LATITUDE and CENTER_LONGITUDE describe the location */ /* of the center of projection, which is not necessarily equal */ /* to the location of the center point of the image. */ CENTER_LATITUDE = 15.000 <DEG> CENTER_LONGITUDE = 180.000 <DEG> LINE_FIRST_PIXEL = 1 LINE_LAST_PIXEL = 113472 SAMPLE_FIRST_PIXEL = 1 SAMPLE_LAST_PIXEL = 36031 MAP_PROJECTION_ROTATION = 0.0 <DEG> MAP_RESOLUTION 3 004. 0 4 PI D MAP_SCALE 0. M T S PI L MAXIMUM_LATITUDE = 17.133317444938 <DEG> MINIMUM_LATITUDE = 16.654542800412 <DEG> LINE_PROJECTION_OFFSET 40 0 4. PI L SAMPLE_PROJECTION_OFFSET 3 10 . PI L EASTERNMOST_LONGITUDE = 26.792840500378 <DEG> WESTERNMOST_LONGITUDE = 26.635450660372 <DEG> END_OBJECT = IMAGE_MAP_PROJECTION /* All xxx_COUNT values are for the MRO spacecraft clock (SCLK) */ /* in seconds:subseconds form. A subsecond tick = 15.2588 microseconds. */ /* All xxx_TIME values are referenced to UTC. */ GROUP = TIME_PARAMETERS Time when the observation first started MRO:OBSERVATION_START_TIME = 2008-12-28T07:06:31.780 Time of the first image line START_TIME = 2008-12-28T07:06:31.915 SPACECRAFT_CLOCK_START_COUNT = «914915212:29272» /* Time of the last image line */ STOP_TIME = 2008-12-28T07:06:40.772 SPACECRAFT_CLOCK_STOP_COUNT = «914915221:19936» /* Time when this RDR product was created */ PRODUCT_CREATION_TIME = 2009-09-15T01:35:05 END_GROUP = TIME_PARAMETERS END Acquisition date 28 December 2008 Local Mars time: 15:47 Latitude (centered) 16.894° Longitude (East) 26.714° Range to target site 279.2 km (174.5 miles) Original image scale range 27.9 cm/pixel (with 1 x 1 binning) so objects ~84 cm across are resolved Map projected scale 25 cm/pixel and North is up Map projection Equirectangular Emission angle: 3.5° Phase angle: 55.2° Solar incidence angle 59°, with the Sun about 31° above the horizon Solar longitude 181.4°, Northern Autumn For non-map projected images North azimuth: 97° Sub-solar azimuth: 353.5° 82 83 Fresh impact crater formed between February 2005 & July 2005 ESP_011425_1775 PDS_VERSION_ID = PDS3 Identification Information NOT_APPLICABLE_CONSTANT = -9998 DATA_SET_ID M O-M- I IS -3- D -V1.1 DATA_SET_NAME M O MA S I SOL TION IMA IN SCI NC P IM NT D V1.1 PRODUCER_INSTITUTION_NAME = «UNIVERSITY OF ARIZONA» PRODUCER_ID = «UA» PRODUCER_FULL_NAME = «ALFRED MCEWEN» OBSERVATION_ID = «ESP_011425_1775» PRODUCT_ID = «ESP_011425_1775_RED» PRODUCT_VERSION_ID = «2.0» INSTRUMENT_HOST_NAME = «MARS RECONNAISSANCE ORBITER» INSTRUMENT_HOST_ID = «MRO» INSTRUMENT_NAME I SOL TION IMA IN SCI NC P IM NT INSTRUMENT_ID I IS TARGET_NAME = «MARS» MISSION_PHASE_NAME T ND D SCI NC P AS ORBIT_NUMBER = 11425 SOURCE_PRODUCT_ID = (ESP_011425_1775_RED0_0, ESP_011425_1775_RED0_1, ESP_011425_1775_RED1_0, ESP_011425_1775_RED1_1, ESP_011425_1775_RED2_0, ESP_011425_1775_RED2_1, ESP_011425_1775_RED3_0, ESP_011425_1775_RED3_1, ESP_011425_1775_RED4_0, ESP_011425_1775_RED4_1, ESP_011425_1775_RED5_0, ESP_011425_1775_RED5_1, ESP_011425_1775_RED6_0, ESP_011425_1775_RED6_1, ESP_011425_1775_RED7_0, ESP_011425_1775_RED7_1, ESP_011425_1775_RED8_0, ESP_011425_1775_RED8_1, ESP_011425_1775_RED9_0, ESP_011425_1775_RED9_1) RATIONALE_DESC = «Fresh impact crater formed between February 2005 and July 2005» SOFTWARE_NAME = «PDS_to_JP2 v3.15.5 (1.49 2008/07/12 04:09:51)» OBJECT = IMAGE_MAP_PROJECTION ^DATA_SET_MAP_PROJECTION = «DSMAP.CAT» MAP_PROJECTION_TYPE = «EQUIRECTANGULAR» PROJECTION_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: The EQUIRECTANGULAR projection is based */ /* on the formula for a sphere. To eliminate confusion in */ /* the IMAGE_MAP_PROJECTION OBJECT we have set all three radii, */ A A IS ADI S, A A IS ADI S, and C A IS ADI S to the same /* number. The value recorded in the three radii is the local */ /* radius at the CENTER_LATITUDE on the Mars ellipsoid. That is, */ /* equatorial radius of 3396.190000 km and polar radius of */ /* 3376.200000 kilometers. Using the local radius of the */ /* ellipsoid implies that the MAP_SCALE and MAP_RESOLUTION */ /* are true at the CENTER_LATITUDE. */ A_AXIS_RADIUS = 3396.19 <KM> B_AXIS_RADIUS = 3396.19 <KM> C_AXIS_RADIUS = 3396.19 <KM> COORDINATE_SYSTEM_NAME = PLANETOCENTRIC POSITIVE_LONGITUDE_DIRECTION = EAST KEYWORD_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: CENTER_LATITUDE and CENTER_LONGITUDE describe the location */ /* of the center of projection, which is not necessarily equal */ /* to the location of the center point of the image. */ CENTER_LATITUDE = 0.000 <DEG> CENTER_LONGITUDE = 180.000 <DEG> LINE_FIRST_PIXEL = 1 LINE_LAST_PIXEL = 33747 SAMPLE_FIRST_PIXEL = 1 SAMPLE_LAST_PIXEL = 24780 MAP_PROJECTION_ROTATION = 0.0 <DEG> MAP_RESOLUTION 3 0 . 00 3 PI D MAP_SCALE 0. M T S PI L MAXIMUM_LATITUDE = -2.2862404149458 <DEG> MINIMUM_LATITUDE = -2.4285683484868 <DEG> LINE_PROJECTION_OFFSET - 4 0 3. PI L SAMPLE_PROJECTION_OFFSET - 3 1 3. PI L EASTERNMOST_LONGITUDE = 278.31325769427 <DEG> WESTERNMOST_LONGITUDE = 278.20874354358 <DEG> END_OBJECT = IMAGE_MAP_PROJECTION /* All xxx_COUNT values are for the MRO spacecraft clock (SCLK) */ /* in seconds:subseconds form. A subsecond tick = 15.2588 microseconds. */ /* All xxx_TIME values are referenced to UTC. */ GROUP = TIME_PARAMETERS Time when the observation first started MRO:OBSERVATION_START_TIME = 2009-01-02T17:55:12.212 Time of the first image line START_TIME = 2009-01-02T17:55:12.337 SPACECRAFT_CLOCK_START_COUNT = «915386133:57653» /* Time of the last image line */ STOP_TIME = 2009-01-02T17:55:14.845 SPACECRAFT_CLOCK_STOP_COUNT = «915386136:25401» /* Time when this RDR product was created */ PRODUCT_CREATION_TIME = 2009-09-14T08:11:38 END_GROUP = TIME_PARAMETERS END Acquisition date 02 January 2009 Local Mars time: 15:52 Latitude (centered) -2.358° Longitude (East) 278.261° Range to target site 262.1 km (163.8 miles) Original image scale range 26.2 cm/pixel (with 1 x 1 binning) so objects ~79 cm across are resolved Map projected scale 25 cm/pixel and North is up Map projection Equirectangular Emission angle: 7.9° Phase angle: 50.2° Solar incidence angle 58°, with the Sun about 32° above the horizon Solar longitude 184.5°, Northern Autumn For non-map projected images North azimuth: 97° Sub-solar azimuth: 4.4° 84 85 Fresh 6-kilometer diameter crater with gullied slopes ESP_011436_1425 PDS_VERSION_ID = PDS3 Identification Information NOT_APPLICABLE_CONSTANT = -9998 DATA_SET_ID M O-M- I IS -3- D -V1.1 DATA_SET_NAME M O MA S I SOL TION IMA IN SCI NC P IM NT D V1.1 PRODUCER_INSTITUTION_NAME = «UNIVERSITY OF ARIZONA» PRODUCER_ID = «UA» PRODUCER_FULL_NAME = «ALFRED MCEWEN» OBSERVATION_ID = «ESP_011436_1425» PRODUCT_ID = «ESP_011436_1425_RED» PRODUCT_VERSION_ID = «2.0» INSTRUMENT_HOST_NAME = «MARS RECONNAISSANCE ORBITER» INSTRUMENT_HOST_ID = «MRO» INSTRUMENT_NAME I SOL TION IMA IN SCI NC P IM NT INSTRUMENT_ID I IS TARGET_NAME = «MARS» MISSION_PHASE_NAME T ND D SCI NC P AS ORBIT_NUMBER = 11436 SOURCE_PRODUCT_ID = (ESP_011436_1425_RED0_0, ESP_011436_1425_RED0_1, ESP_011436_1425_RED1_0, ESP_011436_1425_RED1_1, ESP_011436_1425_RED2_0, ESP_011436_1425_RED2_1, ESP_011436_1425_RED3_0, ESP_011436_1425_RED3_1, ESP_011436_1425_RED4_0, ESP_011436_1425_RED4_1, ESP_011436_1425_RED5_0, ESP_011436_1425_RED5_1, ESP_011436_1425_RED6_0, ESP_011436_1425_RED6_1, ESP_011436_1425_RED7_0, ESP_011436_1425_RED7_1, ESP_011436_1425_RED8_0, ESP_011436_1425_RED8_1, ESP_011436_1425_RED9_0, ESP_011436_1425_RED9_1) RATIONALE_DESC = «Fresh 6-kilometer diameter crater with gullied slopes» SOFTWARE_NAME = «PDS_to_JP2 v3.15.5 (1.49 2008/07/12 04:09:51)» OBJECT = IMAGE_MAP_PROJECTION ^DATA_SET_MAP_PROJECTION = «DSMAP.CAT» MAP_PROJECTION_TYPE = «EQUIRECTANGULAR» PROJECTION_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: The EQUIRECTANGULAR projection is based */ /* on the formula for a sphere. To eliminate confusion in */ /* the IMAGE_MAP_PROJECTION OBJECT we have set all three radii, */ A A IS ADI S, A A IS ADI S, and C A IS ADI S to the same /* number. The value recorded in the three radii is the local */ /* radius at the CENTER_LATITUDE on the Mars ellipsoid. That is, */ /* equatorial radius of 3396.190000 km and polar radius of */ /* 3376.200000 kilometers. Using the local radius of the */ /* ellipsoid implies that the MAP_SCALE and MAP_RESOLUTION */ /* are true at the CENTER_LATITUDE. */ A_AXIS_RADIUS = 3389.5743490888 <KM> B_AXIS_RADIUS = 3389.5743490888 <KM> C_AXIS_RADIUS = 3389.5743490888 <KM> COORDINATE_SYSTEM_NAME = PLANETOCENTRIC POSITIVE_LONGITUDE_DIRECTION = EAST KEYWORD_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: CENTER_LATITUDE and CENTER_LONGITUDE describe the location */ /* of the center of projection, which is not necessarily equal */ /* to the location of the center point of the image. */ CENTER_LATITUDE = -35.000 <DEG> CENTER_LONGITUDE = 180.000 <DEG> LINE_FIRST_PIXEL = 1 LINE_LAST_PIXEL = 75752 SAMPLE_FIRST_PIXEL = 1 SAMPLE_LAST_PIXEL = 32121 MAP_PROJECTION_ROTATION = 0.0 <DEG> MAP_RESOLUTION 3 3 . 30 30 PI D MAP_SCALE 0. M T S PI L MAXIMUM_LATITUDE = -36.873497278416 <DEG> MINIMUM_LATITUDE = -37.193615383574 <DEG> LINE_PROJECTION_OFFSET - 30. PI L SAMPLE_PROJECTION_OFFSET -31 4 41 . PI L EASTERNMOST_LONGITUDE = 343.43517041539 <DEG> WESTERNMOST_LONGITUDE = 343.26946689019 <DEG> END_OBJECT = IMAGE_MAP_PROJECTION /* All xxx_COUNT values are for the MRO spacecraft clock (SCLK) */ /* in seconds:subseconds form. A subsecond tick = 15.2588 microseconds. */ /* All xxx_TIME values are referenced to UTC. */ GROUP = TIME_PARAMETERS Time when the observation first started MRO:OBSERVATION_START_TIME = 2009-01-03T14:18:43.359 Time of the first image line START_TIME = 2009-01-03T14:18:43.484 SPACECRAFT_CLOCK_START_COUNT = «915459545:01856» /* Time of the last image line */ STOP_TIME = 2009-01-03T14:18:49.242 SPACECRAFT_CLOCK_STOP_COUNT = «915459550:51552» /* Time when this RDR product was created */ PRODUCT_CREATION_TIME = 2009-09-14T12:15:00 END_GROUP = TIME_PARAMETERS END Acquisition date 03 January 2009 Local Mars time: 16:03 Latitude (centered) -37.034° Longitude (East) 343.353° Range to target site 262.3 km (163.9 miles) Original image scale range 26.2 cm/pixel (with 1 x 1 binning) so objects ~79 cm across are resolved Map projected scale 25 cm/pixel and North is up Map projection Equirectangular Emission angle: 16.5° Phase angle: 51.1° Solar incidence angle 66°, with the Sun about 24° above the horizon Solar longitude 185.0°, Northern Autumn For non-map projected images North azimuth: 97° Sub-solar azimuth: 23.3° 88 89 Very fresh 1-kilometer impact crater ESP_011563_2200 PDS_VERSION_ID = PDS3 Identification Information NOT_APPLICABLE_CONSTANT = -9998 DATA_SET_ID M O-M- I IS -3- D -V1.1 DATA_SET_NAME M O MA S I SOL TION IMA IN SCI NC P IM NT D V1.1 PRODUCER_INSTITUTION_NAME = «UNIVERSITY OF ARIZONA» PRODUCER_ID = «UA» PRODUCER_FULL_NAME = «ALFRED MCEWEN» OBSERVATION_ID = «ESP_011563_2200» PRODUCT_ID = «ESP_011563_2200_RED» PRODUCT_VERSION_ID = «2.0» INSTRUMENT_HOST_NAME = «MARS RECONNAISSANCE ORBITER» INSTRUMENT_HOST_ID = «MRO» INSTRUMENT_NAME I SOL TION IMA IN SCI NC P IM NT INSTRUMENT_ID I IS TARGET_NAME = «MARS» MISSION_PHASE_NAME T ND D SCI NC P AS ORBIT_NUMBER = 11563 SOURCE_PRODUCT_ID = (ESP_011563_2200_RED1_0, ESP_011563_2200_RED1_1, ESP_011563_2200_RED2_0, ESP_011563_2200_RED2_1, ESP_011563_2200_RED3_0, ESP_011563_2200_RED3_1, ESP_011563_2200_RED4_0, ESP_011563_2200_RED4_1, ESP_011563_2200_RED5_0, ESP_011563_2200_RED5_1, ESP_011563_2200_RED6_0, ESP_011563_2200_RED6_1, ESP_011563_2200_RED7_0, ESP_011563_2200_RED7_1, ESP_011563_2200_RED8_0, ESP_011563_2200_RED8_1) RATIONALE_DESC = «Very fresh 1-km impact crater» SOFTWARE_NAME = «PDS_to_JP2 v3.15.5 (1.49 2008/07/12 04:09:51)» OBJECT = IMAGE_MAP_PROJECTION ^DATA_SET_MAP_PROJECTION = «DSMAP.CAT» MAP_PROJECTION_TYPE = «EQUIRECTANGULAR» PROJECTION_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: The EQUIRECTANGULAR projection is based */ /* on the formula for a sphere. To eliminate confusion in */ /* the IMAGE_MAP_PROJECTION OBJECT we have set all three radii, */ A A IS ADI S, A A IS ADI S, and C A IS ADI S to the same /* number. The value recorded in the three radii is the local */ /* radius at the CENTER_LATITUDE on the Mars ellipsoid. That is, */ /* equatorial radius of 3396.190000 km and polar radius of */ /* 3376.200000 kilometers. Using the local radius of the */ /* ellipsoid implies that the MAP_SCALE and MAP_RESOLUTION */ /* are true at the CENTER_LATITUDE. */ A_AXIS_RADIUS = 3389.5743490888 <KM> B_AXIS_RADIUS = 3389.5743490888 <KM> C_AXIS_RADIUS = 3389.5743490888 <KM> COORDINATE_SYSTEM_NAME = PLANETOCENTRIC POSITIVE_LONGITUDE_DIRECTION = EAST KEYWORD_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: CENTER_LATITUDE and CENTER_LONGITUDE describe the location */ /* of the center of projection, which is not necessarily equal */ /* to the location of the center point of the image. */ CENTER_LATITUDE = 35.000 <DEG> CENTER_LONGITUDE = 180.000 <DEG> LINE_FIRST_PIXEL = 1 LINE_LAST_PIXEL = 55975 SAMPLE_FIRST_PIXEL = 1 SAMPLE_LAST_PIXEL = 27618 MAP_PROJECTION_ROTATION = 0.0 <DEG> MAP_RESOLUTION 3 3 . 30 30 PI D MAP_SCALE 0. M T S PI L MAXIMUM_LATITUDE = 39.826540214725 <DEG> MINIMUM_LATITUDE = 39.589998083607 <DEG> LINE_PROJECTION_OFFSET 4 4431. PI L SAMPLE_PROJECTION_OFFSET 14 30 4. PI L EASTERNMOST_LONGITUDE = 104.18859612626 <DEG> WESTERNMOST_LONGITUDE = 104.046118629 <DEG> END_OBJECT = IMAGE_MAP_PROJECTION /* All xxx_COUNT values are for the MRO spacecraft clock (SCLK) */ /* in seconds:subseconds form. A subsecond tick = 15.2588 microseconds. */ /* All xxx_TIME values are referenced to UTC. */ GROUP = TIME_PARAMETERS Time when the observation first started MRO:OBSERVATION_START_TIME = 2009-01-13T12:13:04.906 Time of the first image line START_TIME = 2009-01-13T12:13:05.055 SPACECRAFT_CLOCK_START_COUNT = «916316006:40561» /* Time of the last image line */ STOP_TIME = 2009-01-13T12:13:09.403 SPACECRAFT_CLOCK_STOP_COUNT = «916316010:63390» /* Time when this RDR product was created */ PRODUCT_CREATION_TIME = 2009-09-14T02:31:47 END_GROUP = TIME_PARAMETERS END Acquisition date 13 January 2009 Local Mars time: 15:39 Latitude (centered) 39.708° Longitude (East) 104.118° Range to target site 299.5 km (187.2 miles) Original image scale range 30.0 cm/pixel (with 1 x 1 binning) so objects ~90 cm across are resolved Map projected scale 25 cm/pixel and North is up Map projection Equirectangular Emission angle: 4.5° Phase angle: 71.3° Solar incidence angle 67°, with the Sun about 23° above the horizon Solar longitude 190.7°, Northern Autumn For non-map projected images North azimuth: 97° Sub-solar azimuth: 337.6° 90 91 Fresh 500-meter nested impact crater ESP_011590_2190 PDS_VERSION_ID = PDS3 Identification Information NOT_APPLICABLE_CONSTANT = -9998 DATA_SET_ID M O-M- I IS -3- D -V1.1 DATA_SET_NAME M O MA S I SOL TION IMA IN SCI NC P IM NT D V1.1 PRODUCER_INSTITUTION_NAME = «UNIVERSITY OF ARIZONA» PRODUCER_ID = «UA» PRODUCER_FULL_NAME = «ALFRED MCEWEN» OBSERVATION_ID = «ESP_011590_2190» PRODUCT_ID = «ESP_011590_2190_RED» PRODUCT_VERSION_ID = «2.0» INSTRUMENT_HOST_NAME = «MARS RECONNAISSANCE ORBITER» INSTRUMENT_HOST_ID = «MRO» INSTRUMENT_NAME I SOL TION IMA IN SCI NC P IM NT INSTRUMENT_ID I IS TARGET_NAME = «MARS» MISSION_PHASE_NAME T ND D SCI NC P AS ORBIT_NUMBER = 11590 SOURCE_PRODUCT_ID = (ESP_011590_2190_RED0_0, ESP_011590_2190_RED0_1, ESP_011590_2190_RED1_0, ESP_011590_2190_RED1_1, ESP_011590_2190_RED2_0, ESP_011590_2190_RED2_1, ESP_011590_2190_RED3_0, ESP_011590_2190_RED3_1, ESP_011590_2190_RED4_0, ESP_011590_2190_RED4_1, ESP_011590_2190_RED5_0, ESP_011590_2190_RED5_1, ESP_011590_2190_RED6_0, ESP_011590_2190_RED6_1, ESP_011590_2190_RED7_0, ESP_011590_2190_RED7_1, ESP_011590_2190_RED8_0, ESP_011590_2190_RED8_1, ESP_011590_2190_RED9_0, ESP_011590_2190_RED9_1) RATIONALE_DESC = «Fresh 500-m nested impact crater» SOFTWARE_NAME = «PDS_to_JP2 v3.15.5 (1.49 2008/07/12 04:09:51)» OBJECT = IMAGE_MAP_PROJECTION ^DATA_SET_MAP_PROJECTION = «DSMAP.CAT» MAP_PROJECTION_TYPE = «EQUIRECTANGULAR» PROJECTION_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: The EQUIRECTANGULAR projection is based */ /* on the formula for a sphere. To eliminate confusion in */ /* the IMAGE_MAP_PROJECTION OBJECT we have set all three radii, */ A A IS ADI S, A A IS ADI S, and C A IS ADI S to the same /* number. The value recorded in the three radii is the local */ /* radius at the CENTER_LATITUDE on the Mars ellipsoid. That is, */ /* equatorial radius of 3396.190000 km and polar radius of */ /* 3376.200000 kilometers. Using the local radius of the */ /* ellipsoid implies that the MAP_SCALE and MAP_RESOLUTION */ /* are true at the CENTER_LATITUDE. */ A_AXIS_RADIUS = 3389.5743490888 <KM> B_AXIS_RADIUS = 3389.5743490888 <KM> C_AXIS_RADIUS = 3389.5743490888 <KM> COORDINATE_SYSTEM_NAME = PLANETOCENTRIC POSITIVE_LONGITUDE_DIRECTION = EAST KEYWORD_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: CENTER_LATITUDE and CENTER_LONGITUDE describe the location */ /* of the center of projection, which is not necessarily equal */ /* to the location of the center point of the image. */ CENTER_LATITUDE = 35.000 <DEG> CENTER_LONGITUDE = 180.000 <DEG> LINE_FIRST_PIXEL = 1 LINE_LAST_PIXEL = 26439 SAMPLE_FIRST_PIXEL = 1 SAMPLE_LAST_PIXEL = 27776 MAP_PROJECTION_ROTATION = 0.0 <DEG> MAP_RESOLUTION 3 3 . 30 30 PI D MAP_SCALE 0. M T S PI L MAXIMUM_LATITUDE = 38.589809891358 <DEG> MINIMUM_LATITUDE = 38.47808419984 <DEG> LINE_PROJECTION_OFFSET 131 . PI L SAMPLE_PROJECTION_OFFSET 1 4 . PI L EASTERNMOST_LONGITUDE = 88.032932615513 <DEG> WESTERNMOST_LONGITUDE = 87.889642208986 <DEG> END_OBJECT = IMAGE_MAP_PROJECTION /* All xxx_COUNT values are for the MRO spacecraft clock (SCLK) */ /* in seconds:subseconds form. A subsecond tick = 15.2588 microseconds. */ /* All xxx_TIME values are referenced to UTC. */ GROUP = TIME_PARAMETERS Time when the observation first started MRO:OBSERVATION_START_TIME = 2009-01-15T14:42:22.134 Time of the first image line START_TIME = 2009-01-15T14:42:22.279 SPACECRAFT_CLOCK_START_COUNT = «916497763:55492» /* Time of the last image line */ STOP_TIME = 2009-01-15T14:42:24.234 SPACECRAFT_CLOCK_STOP_COUNT = «916497765:52587» /* Time when this RDR product was created */ PRODUCT_CREATION_TIME = 2009-09-14T03:43:21 END_GROUP = TIME_PARAMETERS END Acquisition date 15 January 2009 Local Mars time: 15:42 Latitude (centered) 38.534° Longitude (East) 87.962° Range to target site 297.5 km (185.9 miles) Original image scale range 29.8 cm/pixel (with 1 x 1 binning) so objects ~89 cm across are resolved Map projected scale 25 cm/pixel and North is up Map projection Equirectangular Emission angle: 3.3° Phase angle: 64.5° Solar incidence angle 67°, with the Sun about 23° above the horizon Solar longitude 192.0°, Northern Autumn For non-map projected images North azimuth: 97° Sub-solar azimuth: 337.9° 92 93 Cross section through impact crater cut by Ganges Chasma wall ESP_011595_1725 PDS_VERSION_ID = PDS3 Identification Information NOT_APPLICABLE_CONSTANT = -9998 DATA_SET_ID M O-M- I IS -3- D -V1.1 DATA_SET_NAME M O MA S I SOL TION IMA IN SCI NC P IM NT D V1.1 PRODUCER_INSTITUTION_NAME = «UNIVERSITY OF ARIZONA» PRODUCER_ID = «UA» PRODUCER_FULL_NAME = «ALFRED MCEWEN» OBSERVATION_ID = «ESP_011595_1725» PRODUCT_ID = «ESP_011595_1725_RED» PRODUCT_VERSION_ID = «2.0» INSTRUMENT_HOST_NAME = «MARS RECONNAISSANCE ORBITER» INSTRUMENT_HOST_ID = «MRO» INSTRUMENT_NAME I SOL TION IMA IN SCI NC P IM NT INSTRUMENT_ID I IS TARGET_NAME = «MARS» MISSION_PHASE_NAME T ND D SCI NC P AS ORBIT_NUMBER = 11595 SOURCE_PRODUCT_ID = (ESP_011595_1725_RED0_0, ESP_011595_1725_RED0_1, ESP_011595_1725_RED1_0, ESP_011595_1725_RED1_1, ESP_011595_1725_RED2_0, ESP_011595_1725_RED2_1, ESP_011595_1725_RED3_0, ESP_011595_1725_RED3_1, ESP_011595_1725_RED4_0, ESP_011595_1725_RED4_1, ESP_011595_1725_RED5_0, ESP_011595_1725_RED5_1, ESP_011595_1725_RED6_0, ESP_011595_1725_RED6_1, ESP_011595_1725_RED7_0, ESP_011595_1725_RED7_1, ESP_011595_1725_RED8_0, ESP_011595_1725_RED8_1, ESP_011595_1725_RED9_0, ESP_011595_1725_RED9_1) RATIONALE_DESC = «Cross section through impact crater cut by Ganges Chasma wall» SOFTWARE_NAME = «PDS_to_JP2 v3.15.5 (1.49 2008/07/12 04:09:51)» OBJECT = IMAGE_MAP_PROJECTION ^DATA_SET_MAP_PROJECTION = «DSMAP.CAT» MAP_PROJECTION_TYPE = «EQUIRECTANGULAR» PROJECTION_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: The EQUIRECTANGULAR projection is based */ /* on the formula for a sphere. To eliminate confusion in */ /* the IMAGE_MAP_PROJECTION OBJECT we have set all three radii, */ A A IS ADI S, A A IS ADI S, and C A IS ADI S to the same /* number. The value recorded in the three radii is the local */ /* radius at the CENTER_LATITUDE on the Mars ellipsoid. That is, */ /* equatorial radius of 3396.190000 km and polar radius of */ /* 3376.200000 kilometers. Using the local radius of the */ /* ellipsoid implies that the MAP_SCALE and MAP_RESOLUTION */ /* are true at the CENTER_LATITUDE. */ A_AXIS_RADIUS = 3396.0368126024 <KM> B_AXIS_RADIUS = 3396.0368126024 <KM> C_AXIS_RADIUS = 3396.0368126024 <KM> COORDINATE_SYSTEM_NAME = PLANETOCENTRIC POSITIVE_LONGITUDE_DIRECTION = EAST KEYWORD_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: CENTER_LATITUDE and CENTER_LONGITUDE describe the location */ /* of the center of projection, which is not necessarily equal */ /* to the location of the center point of the image. */ CENTER_LATITUDE = -5.000 <DEG> CENTER_LONGITUDE = 180.000 <DEG> LINE_FIRST_PIXEL = 1 LINE_LAST_PIXEL = 41266 SAMPLE_FIRST_PIXEL = 1 SAMPLE_LAST_PIXEL = 32140 MAP_PROJECTION_ROTATION = 0.0 <DEG> MAP_RESOLUTION 3 0 .0 3 PI D MAP_SCALE 0. M T S PI L MAXIMUM_LATITUDE = -7.5155869237498 <DEG> MINIMUM_LATITUDE = -7.6896416099425 <DEG> LINE_PROJECTION_OFFSET -1 1 . PI L SAMPLE_PROJECTION_OFFSET -3 3 03. PI L EASTERNMOST_LONGITUDE = 318.7243833086 <DEG> WESTERNMOST_LONGITUDE = 318.58830822562 <DEG> END_OBJECT = IMAGE_MAP_PROJECTION /* All xxx_COUNT values are for the MRO spacecraft clock (SCLK) */ /* in seconds:subseconds form. A subsecond tick = 15.2588 microseconds. */ /* All xxx_TIME values are referenced to UTC. */ GROUP = TIME_PARAMETERS Time when the observation first started MRO:OBSERVATION_START_TIME = 2009-01-15T23:48:53.688 Time of the first image line START_TIME = 2009-01-15T23:48:53.821 SPACECRAFT_CLOCK_START_COUNT = «916530555:25552» /* Time of the last image line */ STOP_TIME = 2009-01-15T23:48:56.927 SPACECRAFT_CLOCK_STOP_COUNT = «916530558:32522» /* Time when this RDR product was created */ PRODUCT_CREATION_TIME = 2009-09-14T05:04:39 END_GROUP = TIME_PARAMETERS END Acquisition date 15 January 2009 Local Mars time: 15:57 Latitude (centered) -7.603° Longitude (East) 318.653° Range to target site 279.2 km (174.5 miles) Original image scale range 27.9 cm/pixel (with 1 x 1 binning) so objects ~84 cm across are resolved Map projected scale 25 cm/pixel and North is up Map projection Equirectangular Emission angle: 19.7° Phase angle: 39.4° Solar incidence angle 59°, with the Sun about 31° above the horizon Solar longitude 192.2°, Northern Autumn For non-map projected images North azimuth: 101° Sub-solar azimuth: 4.2° 94 95 Candidate fresh impact crater ESP_011623_2100 PDS_VERSION_ID = PDS3 Identification Information NOT_APPLICABLE_CONSTANT = -9998 DATA_SET_ID M O-M- I IS -3- D -V1.1 DATA_SET_NAME M O MA S I SOL TION IMA IN SCI NC P IM NT D V1.1 PRODUCER_INSTITUTION_NAME = «UNIVERSITY OF ARIZONA» PRODUCER_ID = «UA» PRODUCER_FULL_NAME = «ALFRED MCEWEN» OBSERVATION_ID = «ESP_011623_2100» PRODUCT_ID = «ESP_011623_2100_RED» PRODUCT_VERSION_ID = «2.0» INSTRUMENT_HOST_NAME = «MARS RECONNAISSANCE ORBITER» INSTRUMENT_HOST_ID = «MRO» INSTRUMENT_NAME I SOL TION IMA IN SCI NC P IM NT INSTRUMENT_ID I IS TARGET_NAME = «MARS» MISSION_PHASE_NAME T ND D SCI NC P AS ORBIT_NUMBER = 11623 SOURCE_PRODUCT_ID = (ESP_011623_2100_RED0_0, ESP_011623_2100_RED0_1, ESP_011623_2100_RED1_0, ESP_011623_2100_RED1_1, ESP_011623_2100_RED2_0, ESP_011623_2100_RED2_1, ESP_011623_2100_RED3_0, ESP_011623_2100_RED3_1, ESP_011623_2100_RED4_0, ESP_011623_2100_RED4_1, ESP_011623_2100_RED5_0, ESP_011623_2100_RED5_1, ESP_011623_2100_RED6_0, ESP_011623_2100_RED6_1, ESP_011623_2100_RED7_0, ESP_011623_2100_RED7_1, ESP_011623_2100_RED8_0, ESP_011623_2100_RED8_1, ESP_011623_2100_RED9_0, ESP_011623_2100_RED9_1) RATIONALE_DESC = «Candidate fresh impact crater» SOFTWARE_NAME = «PDS_to_JP2 v3.15.5 (1.49 2008/07/12 04:09:51)» OBJECT = IMAGE_MAP_PROJECTION ^DATA_SET_MAP_PROJECTION = «DSMAP.CAT» MAP_PROJECTION_TYPE = «EQUIRECTANGULAR» PROJECTION_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: The EQUIRECTANGULAR projection is based */ /* on the formula for a sphere. To eliminate confusion in */ /* the IMAGE_MAP_PROJECTION OBJECT we have set all three radii, */ A A IS ADI S, A A IS ADI S, and C A IS ADI S to the same /* number. The value recorded in the three radii is the local */ /* radius at the CENTER_LATITUDE on the Mars ellipsoid. That is, */ /* equatorial radius of 3396.190000 km and polar radius of */ /* 3376.200000 kilometers. Using the local radius of the */ /* ellipsoid implies that the MAP_SCALE and MAP_RESOLUTION */ /* are true at the CENTER_LATITUDE. */ A_AXIS_RADIUS = 3392.5936110435 <KM> B_AXIS_RADIUS = 3392.5936110435 <KM> C_AXIS_RADIUS = 3392.5936110435 <KM> COORDINATE_SYSTEM_NAME = PLANETOCENTRIC POSITIVE_LONGITUDE_DIRECTION = EAST KEYWORD_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: CENTER_LATITUDE and CENTER_LONGITUDE describe the location */ /* of the center of projection, which is not necessarily equal */ /* to the location of the center point of the image. */ CENTER_LATITUDE = 25.000 <DEG> CENTER_LONGITUDE = 180.000 <DEG> LINE_FIRST_PIXEL = 1 LINE_LAST_PIXEL = 25662 SAMPLE_FIRST_PIXEL = 1 SAMPLE_LAST_PIXEL = 26922 MAP_PROJECTION_ROTATION = 0.0 <DEG> MAP_RESOLUTION 3 4 . 14 33 PI D MAP_SCALE 0. M T S PI L MAXIMUM_LATITUDE = 29.551477989302 <DEG> MINIMUM_LATITUDE = 29.443133816978 <DEG> LINE_PROJECTION_OFFSET 01. PI L SAMPLE_PROJECTION_OFFSET -1 4 . PI L EASTERNMOST_LONGITUDE = 267.46771564516 <DEG> WESTERNMOST_LONGITUDE = 267.34230059075 <DEG> END_OBJECT = IMAGE_MAP_PROJECTION /* All xxx_COUNT values are for the MRO spacecraft clock (SCLK) */ /* in seconds:subseconds form. A subsecond tick = 15.2588 microseconds. */ /* All xxx_TIME values are referenced to UTC. */ GROUP = TIME_PARAMETERS Time when the observation first started MRO:OBSERVATION_START_TIME = 2009-01-18T04:22:16.182 Time of the first image line START_TIME = 2009-01-18T04:22:16.320 SPACECRAFT_CLOCK_START_COUNT = «916719757:58577» /* Time of the last image line */ STOP_TIME = 2009-01-18T04:22:18.195 SPACECRAFT_CLOCK_STOP_COUNT = «916719759:50343» /* Time when this RDR product was created */ PRODUCT_CREATION_TIME = 2009-09-13T02:48:11 END_GROUP = TIME_PARAMETERS END Acquisition date 18 January 2009 Local Mars time: 15:41 Latitude (centered) 29.497° Longitude (East) 267.405° Range to target site 286.9 km (179.3 miles) Original image scale range 28.7 cm/pixel (with 1 x 1 binning) so objects ~86 cm across are resolved Map projected scale 25 cm/pixel and North is up Map projection Equirectangular Emission angle: 6.8° Phase angle: 70.3° Solar incidence angle 64°, with the Sun about 26° above the horizon Solar longitude 193.5°, Northern Autumn For non-map projected images North azimuth: 97° Sub-solar azimuth: 341.2° 98 99 Gullies in pole-facing slopes of crater ESP_011705_1410 PDS_VERSION_ID = PDS3 Identification Information NOT_APPLICABLE_CONSTANT = -9998 DATA_SET_ID M O-M- I IS -3- D -V1.1 DATA_SET_NAME M O MA S I SOL TION IMA IN SCI NC P IM NT D V1.1 PRODUCER_INSTITUTION_NAME = «UNIVERSITY OF ARIZONA» PRODUCER_ID = «UA» PRODUCER_FULL_NAME = «ALFRED MCEWEN» OBSERVATION_ID = «ESP_011705_1410» PRODUCT_ID = «ESP_011705_1410_RED» PRODUCT_VERSION_ID = «2.0» INSTRUMENT_HOST_NAME = «MARS RECONNAISSANCE ORBITER» INSTRUMENT_HOST_ID = «MRO» INSTRUMENT_NAME I SOL TION IMA IN SCI NC P IM NT INSTRUMENT_ID I IS TARGET_NAME = «MARS» MISSION_PHASE_NAME T ND D SCI NC P AS ORBIT_NUMBER = 11705 SOURCE_PRODUCT_ID = (ESP_011705_1410_RED0_0, ESP_011705_1410_RED0_1, ESP_011705_1410_RED1_0, ESP_011705_1410_RED1_1, ESP_011705_1410_RED2_0, ESP_011705_1410_RED2_1, ESP_011705_1410_RED3_0, ESP_011705_1410_RED3_1, ESP_011705_1410_RED4_0, ESP_011705_1410_RED4_1, ESP_011705_1410_RED5_0, ESP_011705_1410_RED5_1, ESP_011705_1410_RED6_0, ESP_011705_1410_RED6_1, ESP_011705_1410_RED7_0, ESP_011705_1410_RED7_1, ESP_011705_1410_RED8_0, ESP_011705_1410_RED8_1, ESP_011705_1410_RED9_0, ESP_011705_1410_RED9_1) RATIONALE_DESC = «Gullies in pole-facing slopes of crater» SOFTWARE_NAME = «PDS_to_JP2 v3.15.5 (1.49 2008/07/12 04:09:51)» OBJECT = IMAGE_MAP_PROJECTION ^DATA_SET_MAP_PROJECTION = «DSMAP.CAT» MAP_PROJECTION_TYPE = «EQUIRECTANGULAR» PROJECTION_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: The EQUIRECTANGULAR projection is based */ /* on the formula for a sphere. To eliminate confusion in */ /* the IMAGE_MAP_PROJECTION OBJECT we have set all three radii, */ A A IS ADI S, A A IS ADI S, and C A IS ADI S to the same /* number. The value recorded in the three radii is the local */ /* radius at the CENTER_LATITUDE on the Mars ellipsoid. That is, */ /* equatorial radius of 3396.190000 km and polar radius of */ /* 3376.200000 kilometers. Using the local radius of the */ /* ellipsoid implies that the MAP_SCALE and MAP_RESOLUTION */ /* are true at the CENTER_LATITUDE. */ A_AXIS_RADIUS = 3389.5743490888 <KM> B_AXIS_RADIUS = 3389.5743490888 <KM> C_AXIS_RADIUS = 3389.5743490888 <KM> COORDINATE_SYSTEM_NAME = PLANETOCENTRIC POSITIVE_LONGITUDE_DIRECTION = EAST KEYWORD_LATITUDE_TYPE = PLANETOCENTRIC /* NOTE: CENTER_LATITUDE and CENTER_LONGITUDE describe the location */ /* of the center of projection, which is not necessarily equal */ /* to the location of the center point of the image. */ CENTER_LATITUDE = -35.000 <DEG> CENTER_LONGITUDE = 180.000 <DEG> LINE_FIRST_PIXEL = 1 LINE_LAST_PIXEL = 26152 SAMPLE_FIRST_PIXEL = 1 SAMPLE_LAST_PIXEL = 13572 MAP_PROJECTION_ROTATION = 0.0 <DEG> MAP_RESOLUTION 11 31 .4 4 PI D MAP_SCALE 0. M T S PI L MAXIMUM_LATITUDE = -38.470667636722 <DEG> MINIMUM_LATITUDE = -38.691692359432 <DEG> LINE_PROJECTION_OFFSET -4 1 . PI L SAMPLE_PROJECTION_OFFSET -1 30. PI L EASTERNMOST_LONGITUDE = 198.2231526095 <DEG> WESTERNMOST_LONGITUDE = 198.08312727908 <DEG> END_OBJECT = IMAGE_MAP_PROJECTION /* All xxx_COUNT values are for the MRO spacecraft clock (SCLK) */ /* in seconds:subseconds form. A subsecond tick = 15.2588 microseconds. */ /* All xxx_TIME values are referenced to UTC. */ GROUP = TIME_PARAMETERS Time when the observation first started MRO:OBSERVATION_START_TIME = 2009-01-24T13:21:48.074 Time of the first image line START_TIME = 2009-01-24T13:21:48.205 SPACECRAFT_CLOCK_START_COUNT = «917270529:51835» /* Time of the last image line */ STOP_TIME = 2009-01-24T13:21:52.169 SPACECRAFT_CLOCK_STOP_COUNT = «917270533:49454» /* Time when this RDR product was created */ PRODUCT_CREATION_TIME = 2009-09-12T01:40:55 END_GROUP = TIME_PARAMETERS END Acquisition date 24 January 2009 Local Mars time: 15:57 Latitude (centered) -38.581° Longitude (East) 198.153° Range to target site 252.0 km (157.5 miles) Original image scale range 50.4 cm/pixel (with 2 x 2 binning) so objects ~151 cm across are resolved Map projected scale 50 cm/pixel and North is up Map projection Equirectangular Emission angle: 0.8° Phase angle: 62.5° Solar incidence angle 62°, with the Sun about 28° above the horizon Solar longitude 197.2°, Northern Autumn For non-map projected images North azimuth: 97° Sub-solar azimuth: 20.0° Tome 1 : Dunes
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![24 MONOCHASSE [1.2] LA TYPOGRAPHIE, FACTEUR DE DIFFÉRENCIATION [I.2.A] La](https://files.speakerdeck.com/presentations/25421e412477439892c0705ccd551923/slide_49.jpg){kind=link}
{kind=link}
![60 MONOCHASSE [2.1] LA TRANSITION VERS L'OUTIL INFORMATIQUE [2.1.A] Vers](https://files.speakerdeck.com/presentations/25421e412477439892c0705ccd551923/slide_51.jpg){kind=link}
{kind=link}
![MONOCHASSE ICONOGRAPHIE MONOCHASSE ICONOGRAPHIE [T.2 N.O5] [T.2 N.O5] --> Des](https://files.speakerdeck.com/presentations/25421e412477439892c0705ccd551923/slide_53.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
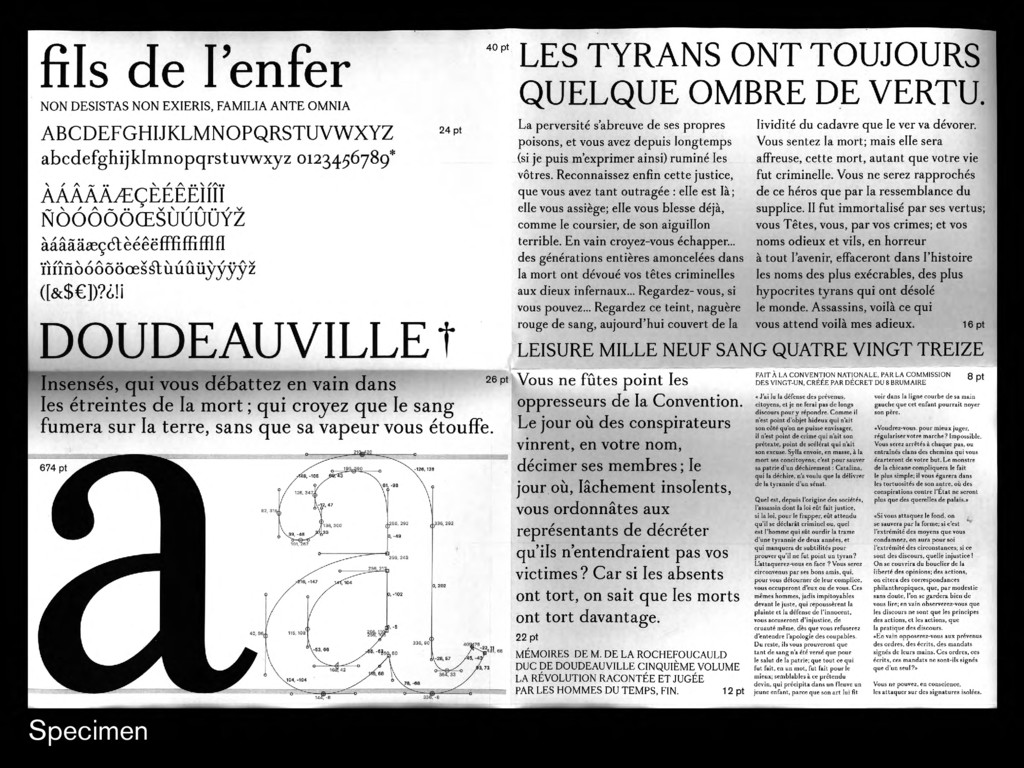
![ABCDEFGHIJKLMNOPQRSTUVWXYZ abcdefghijklmnopqrstuvwxyz 0123456789* ÀÁÂÃÄÆÇÈÉÊËÌÍÎÏ ÑÒÓÔÕÖŒŠÙÚÛÜÝŽ àáâãäæçctèéêëfffiffifflfl ïìíîñòóôõöœšstùúûüỳýÿŷž ([&$€])?¿!¡ Full alphabet](https://files.speakerdeck.com/presentations/25421e412477439892c0705ccd551923/slide_134.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
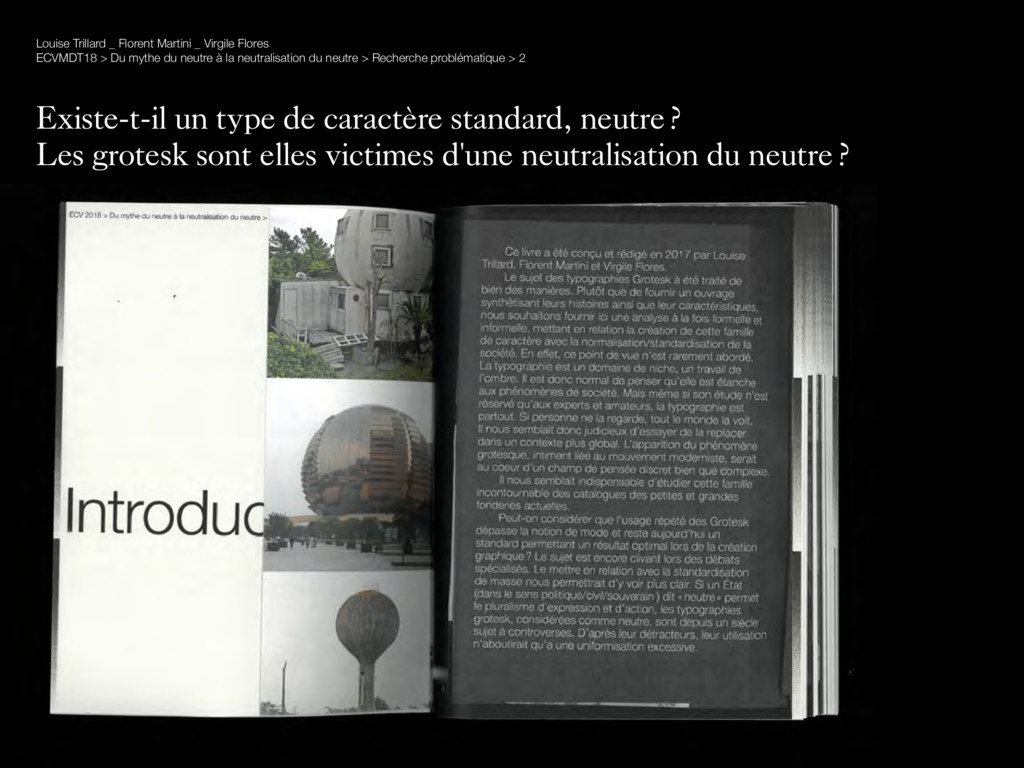{kind=link}
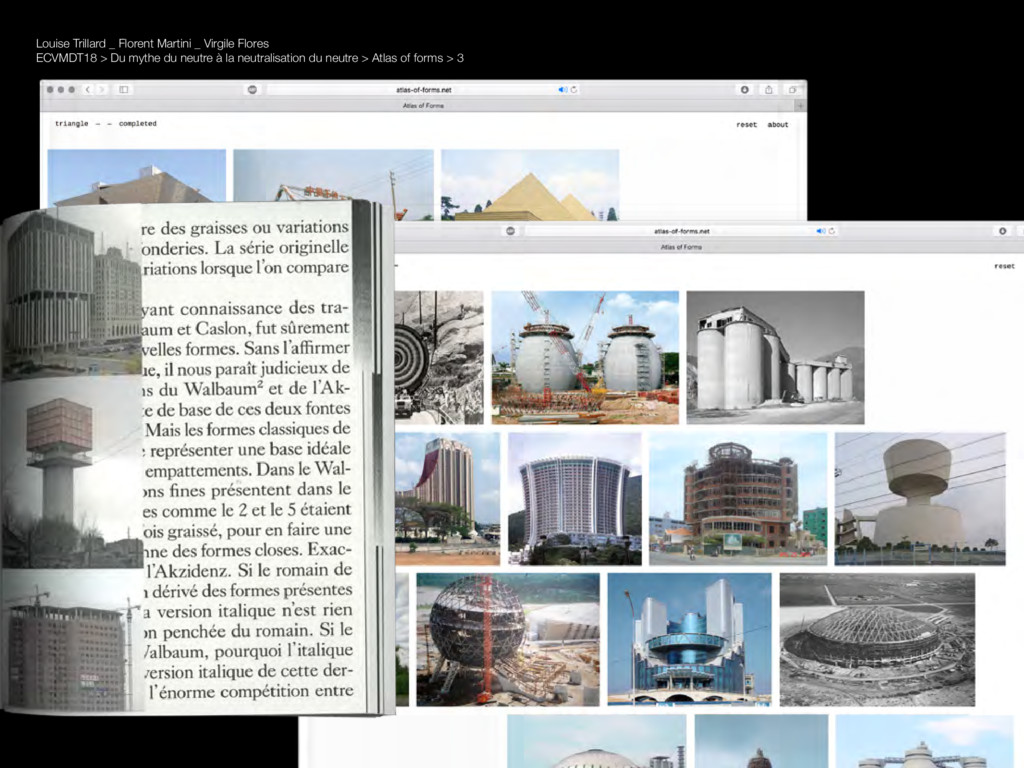{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![abcdefghijklmnopqrstuvwxyz & fifl @ ABCDEFGHIJKLMNOPQRSTUVWXYZ?! ([]) 0123456789 €$ “”‘’*.,:;·…-–—`´ˆ¸˜¨ àáâãäåæçèéêëìíîïiñòóôõöœšùúûüýÿž](https://files.speakerdeck.com/presentations/25421e412477439892c0705ccd551923/slide_194.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
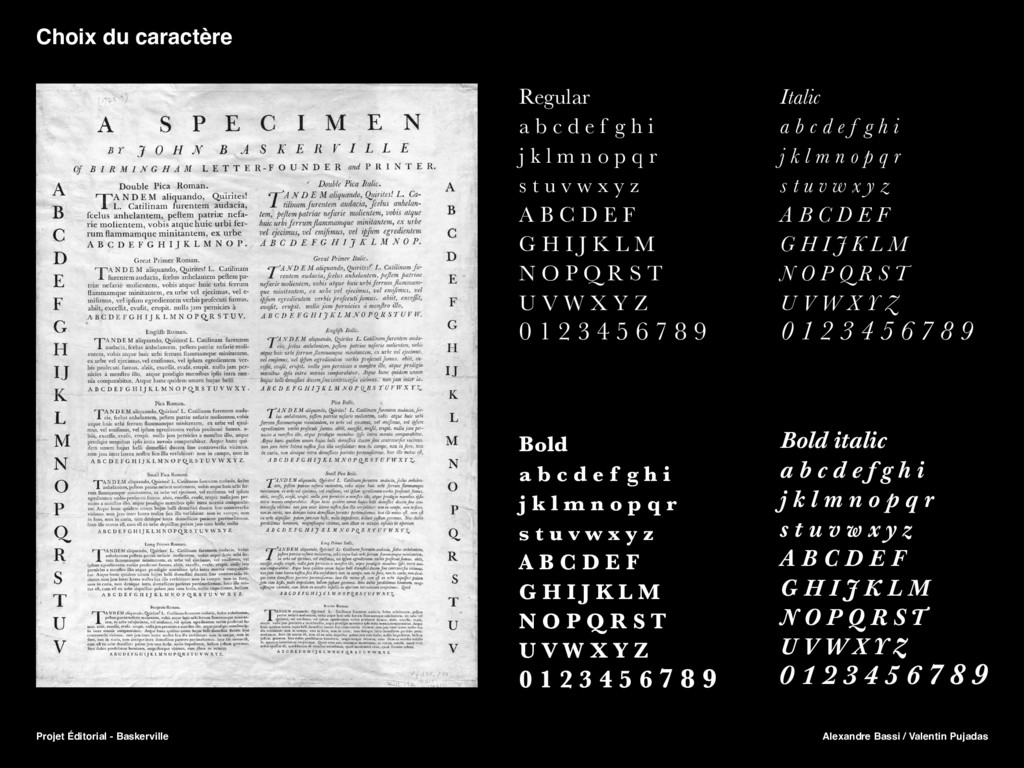{kind=link}
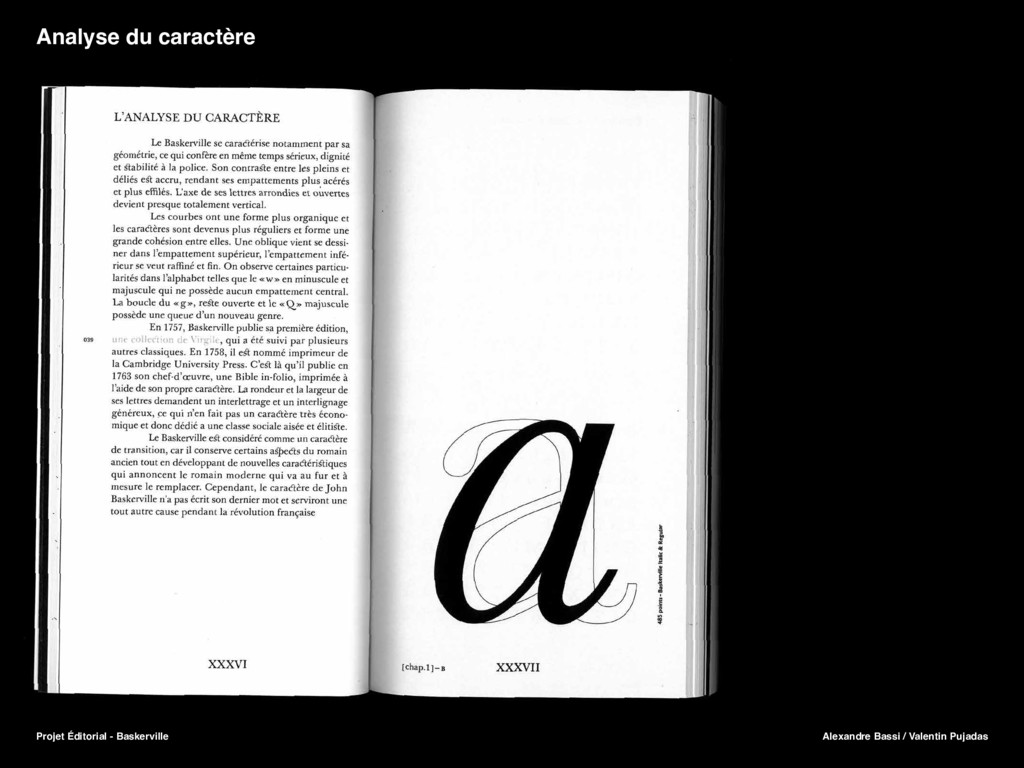{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![abcdefghijklm nopqrstuvwxyz stctąçëõîřùfiflffk ABCDEFGHJKLM NOPQRSTVWXYZ ŒÆÂĘÉÇÏÎÑÒŠŲŪ «‹1234567890›» [(-—_.,;:‘"*?!‽)] “†&$£¥€¢¶@ß„ Le](https://files.speakerdeck.com/presentations/25421e412477439892c0705ccd551923/slide_225.jpg){kind=link}
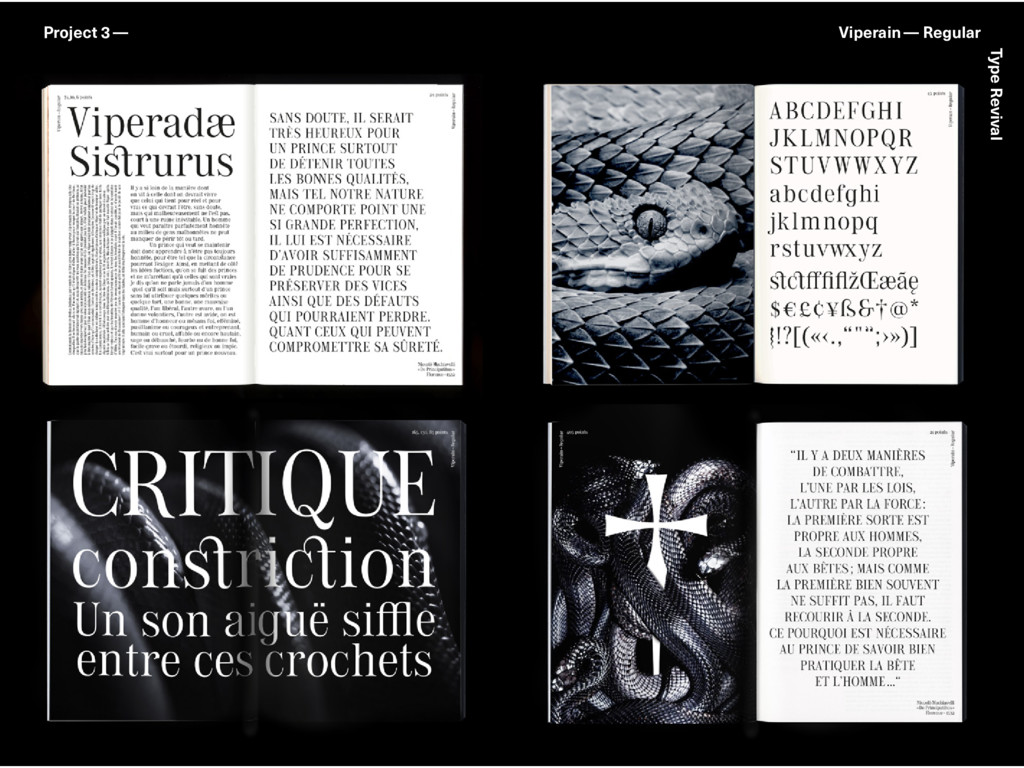{kind=link}
{kind=link}
{kind=link}
{kind=link}
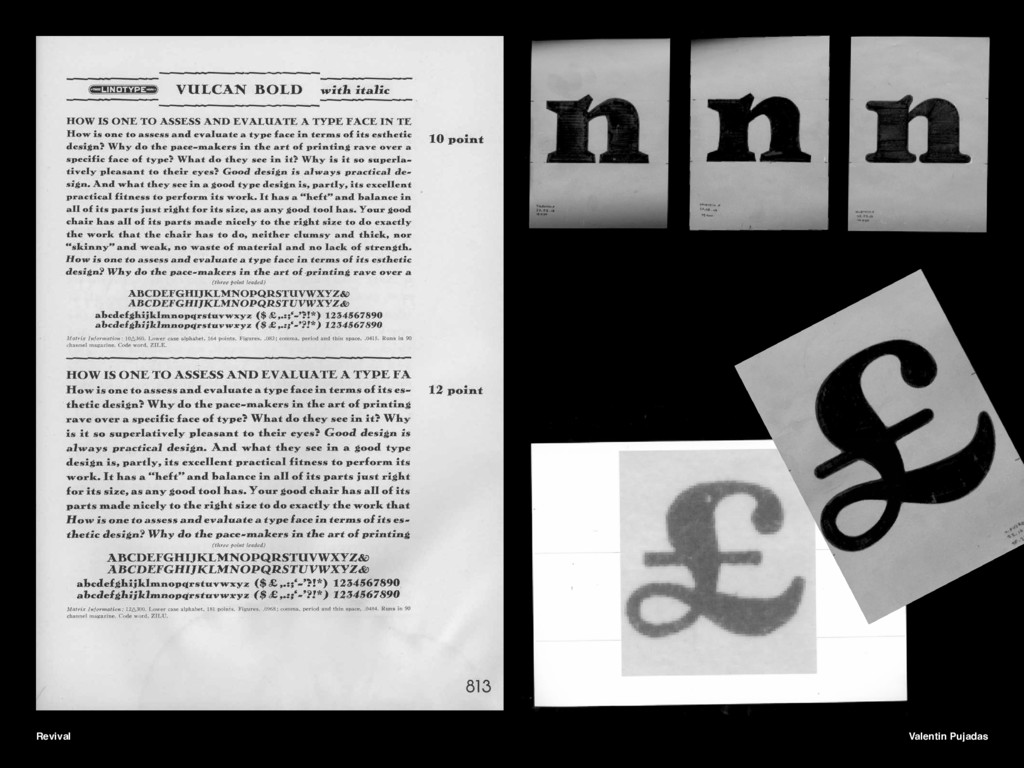{kind=link}
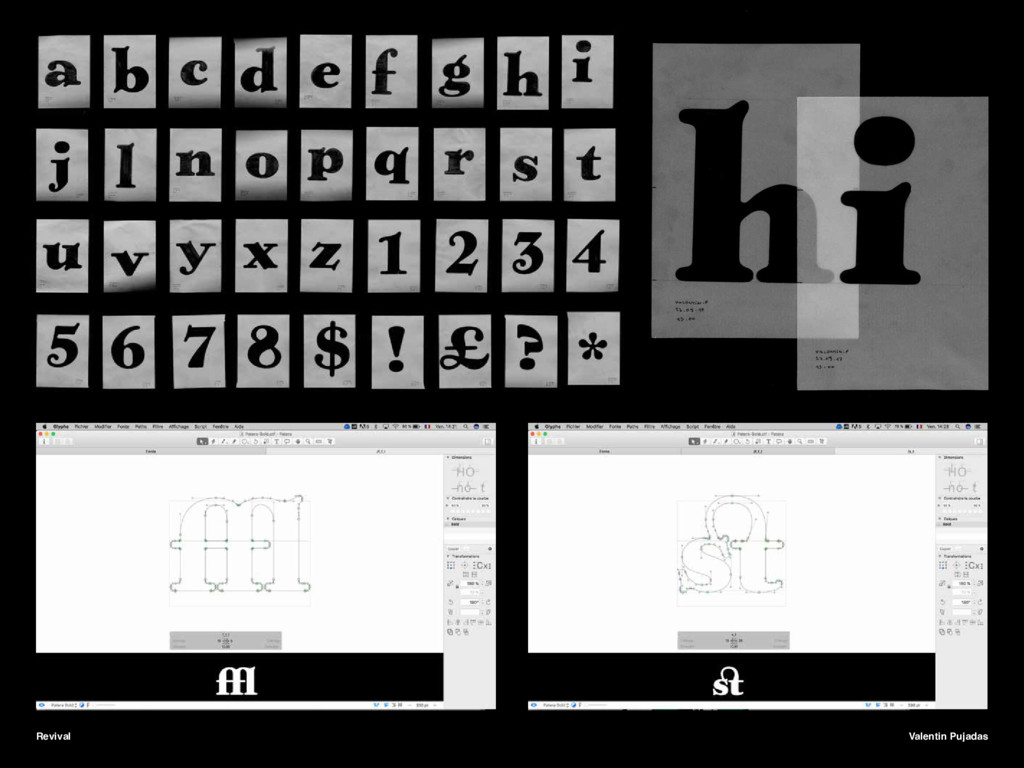{kind=link}
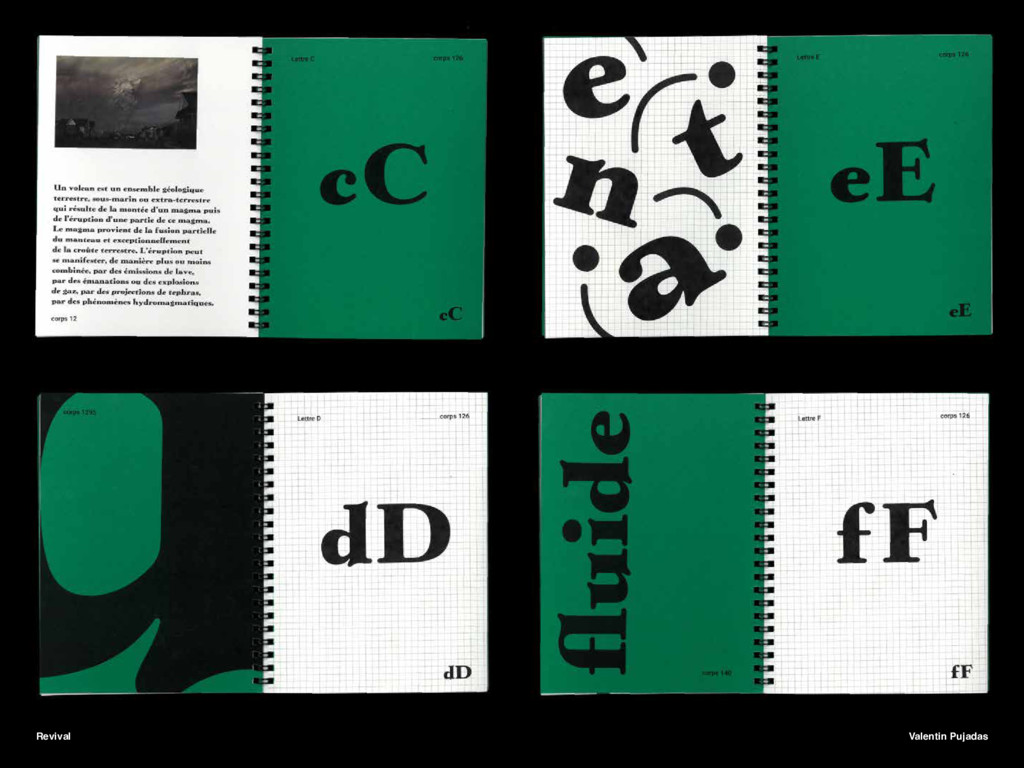{kind=link}
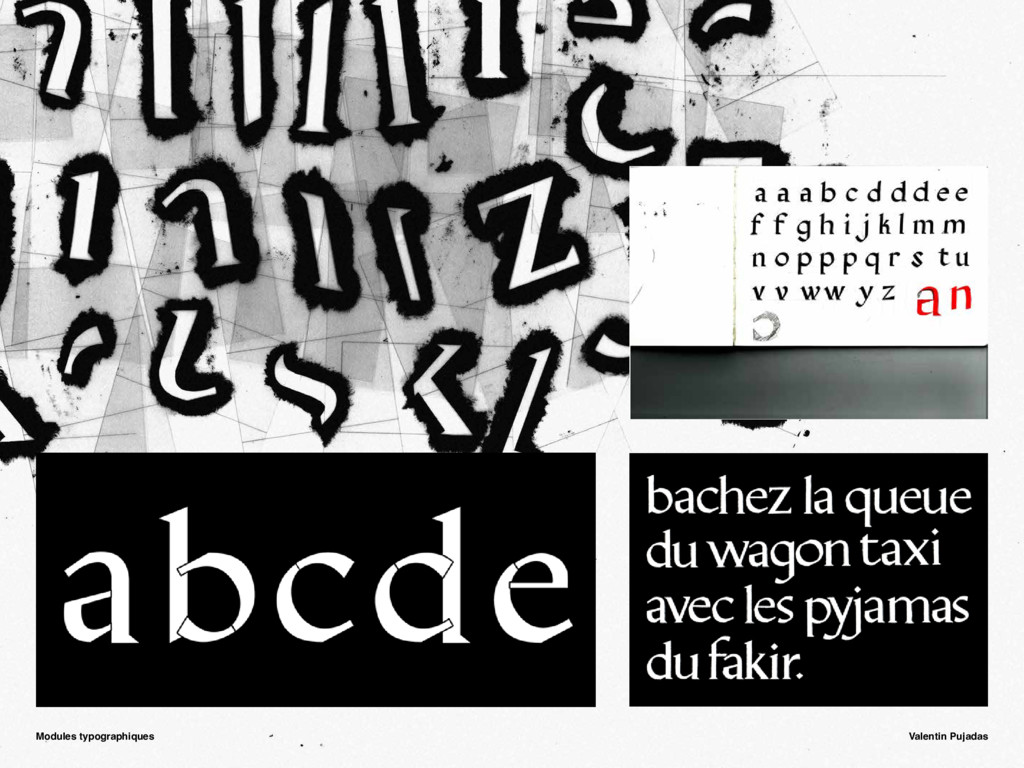{kind=link}
{kind=link}
{kind=link}
{kind=link}
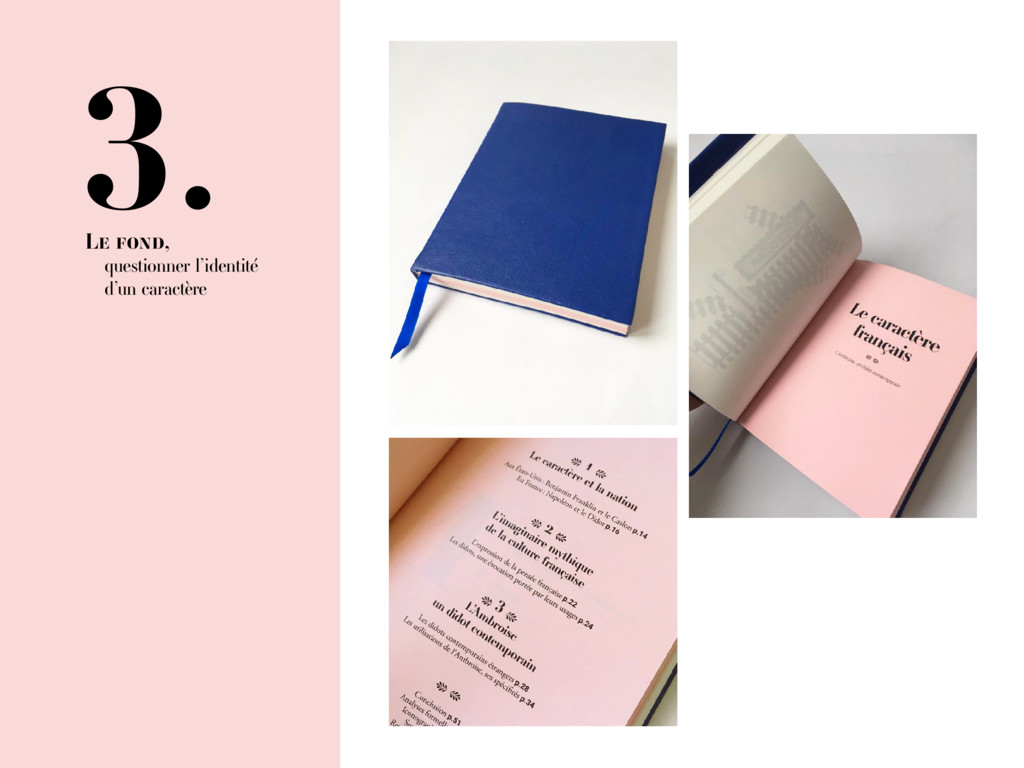{kind=link}
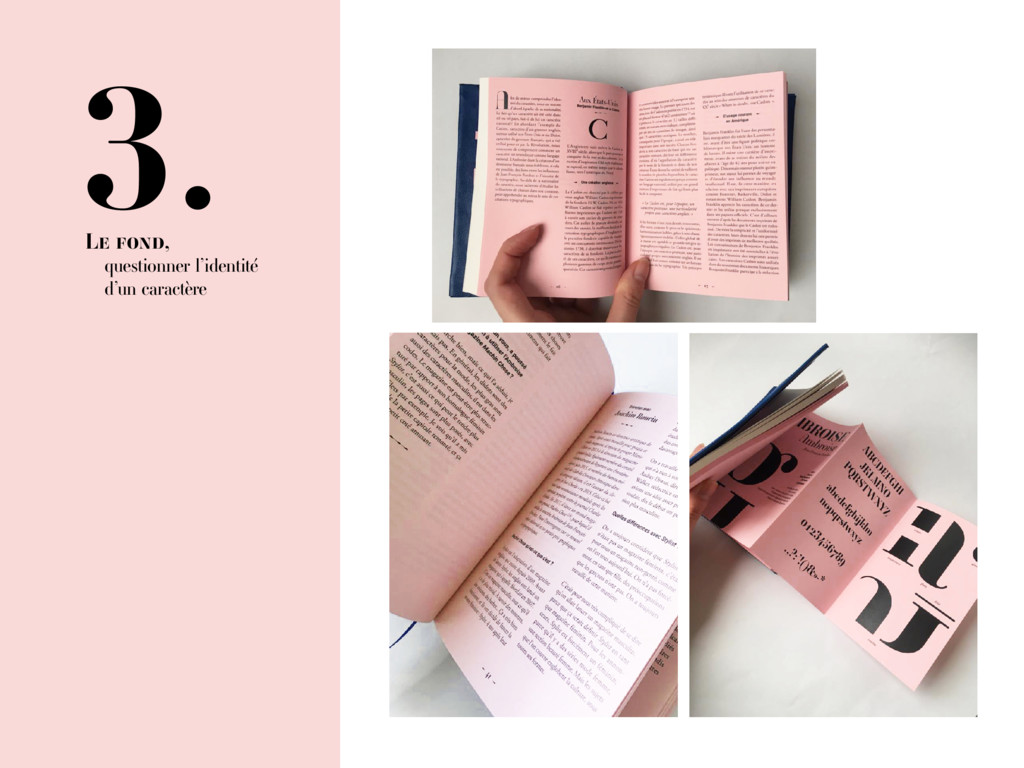{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}