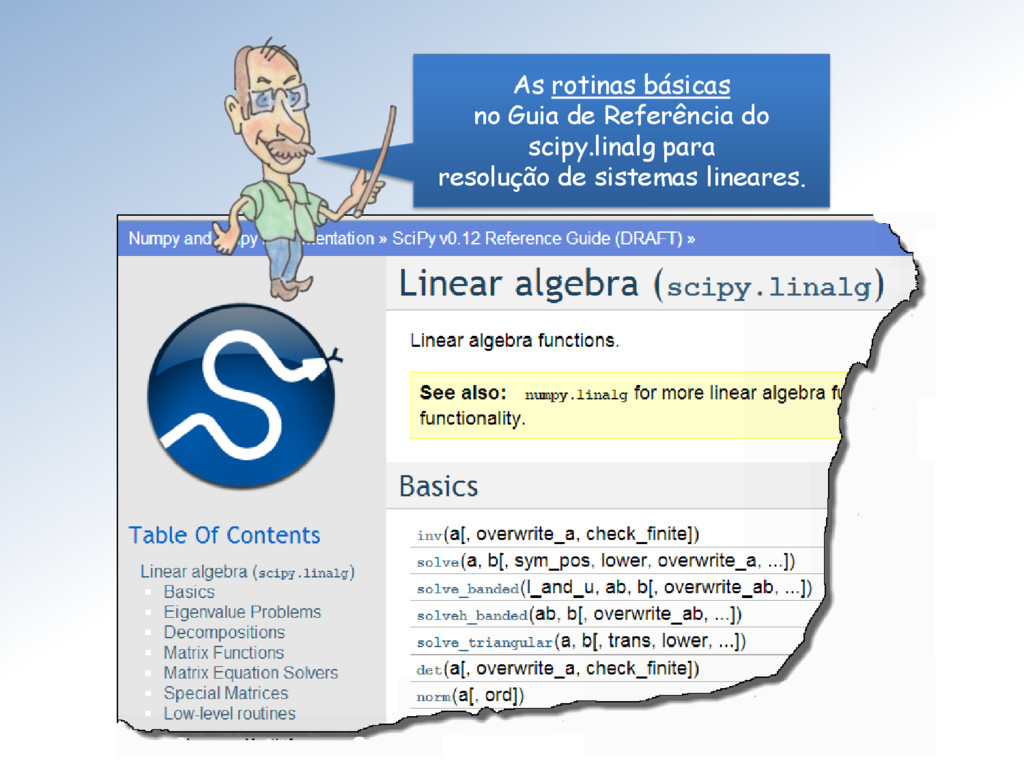
comunidade de Computação Científica, tem trabalhado arduamente no desenvolvimento da Álgebra Linear Computacional. Em particular na resolução de sistemas lineares. Mestre, descobri o caminho das pedras. Muito mais que isto, percebi claramente a importância das bibliotecas BLAS e LAPACK !
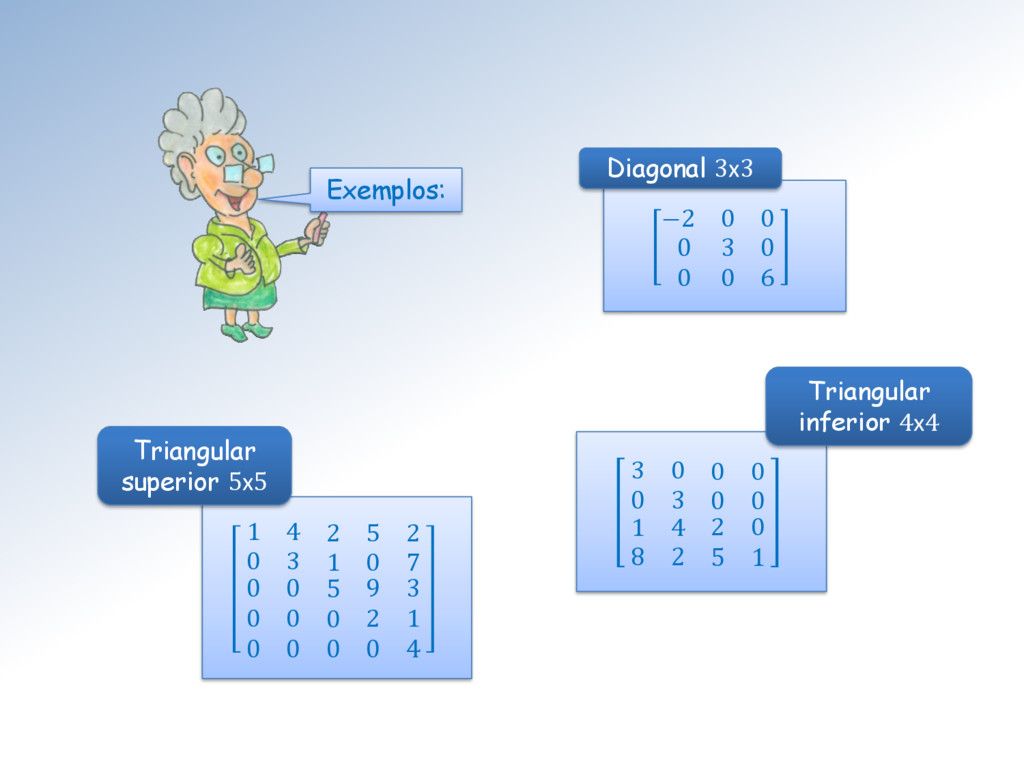
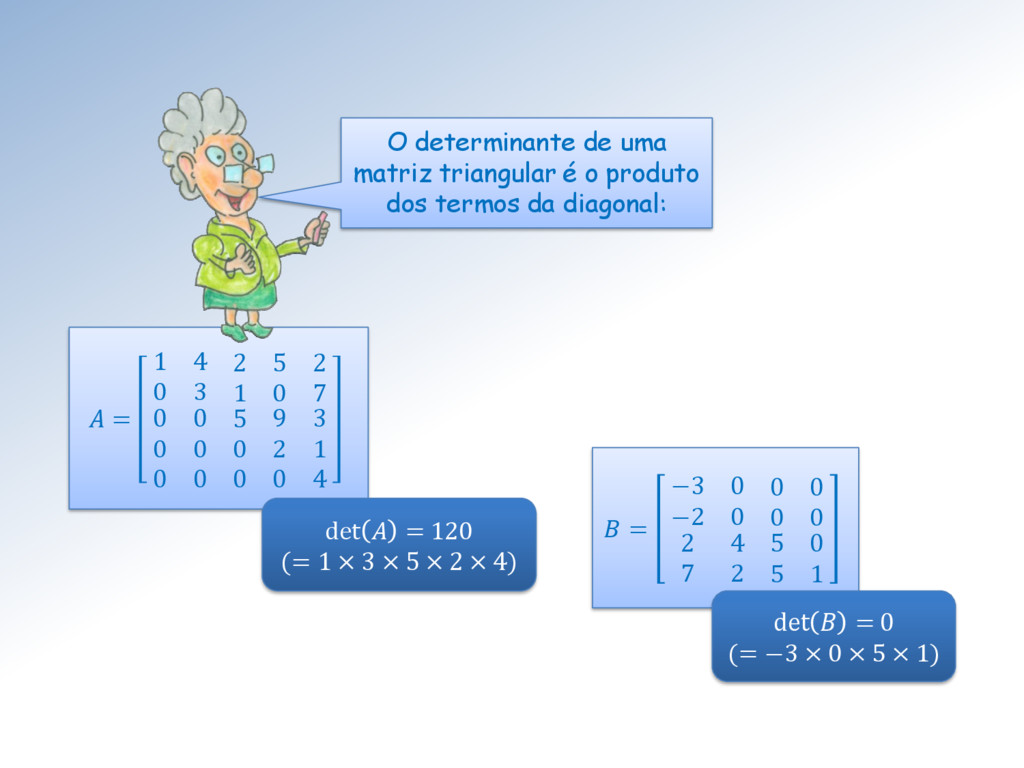
cujas definições devemos recordar: Quando todos os seus elementos fora da diagonal são nulos: ≠ ⟹ = 0 Diagonal Quando todos os elementos acima da diagonal são nulos: < ⟹ = 0 Triangular inferior Quando todos os elementos abaixo da diagonal são nulos: > ⟹ = 0 Triangular superior
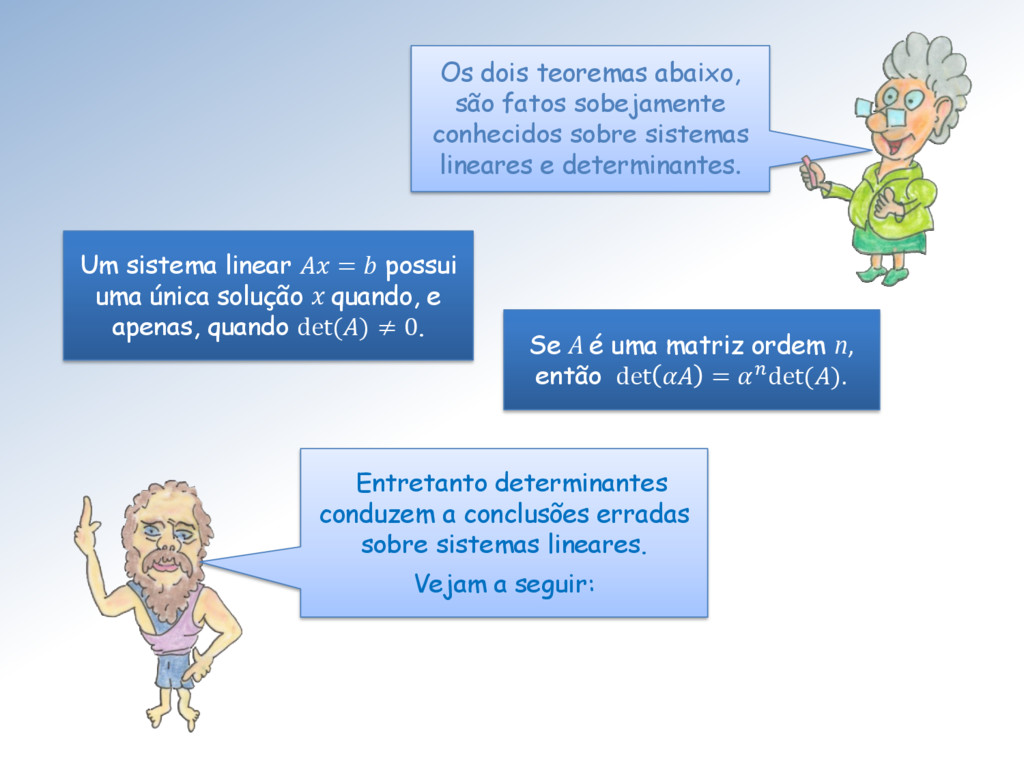
det(). Um sistema linear = possui uma única solução quando, e apenas, quando det() ≠ 0. Os dois teoremas abaixo, são fatos sobejamente conhecidos sobre sistemas lineares e determinantes. Entretanto determinantes conduzem a conclusões erradas sobre sistemas lineares. Vejam a seguir:
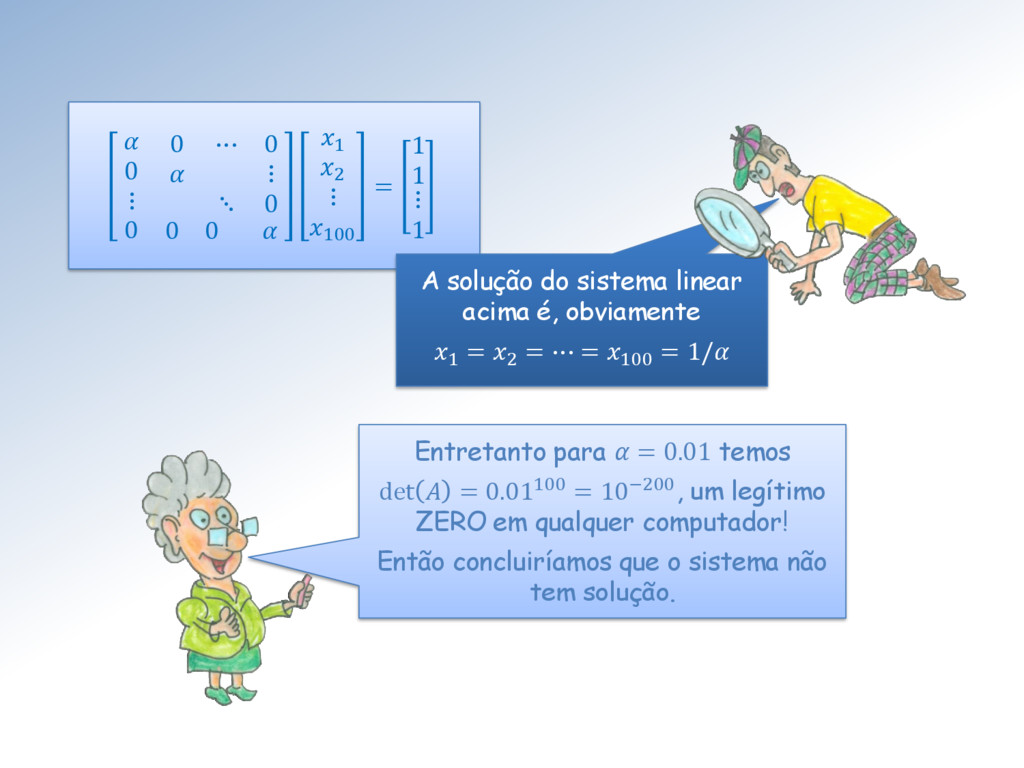
um legítimo ZERO em qualquer computador! Então concluiríamos que o sistema não tem solução. 0 ⋮ 0 ⋯ 0 ⋮ ⋱ 0 0 0 0 1 2 ⋮ 100 = 1 1 ⋮ 1 A solução do sistema linear acima é, obviamente 1 = 2 = ⋯ = 100 = 1/
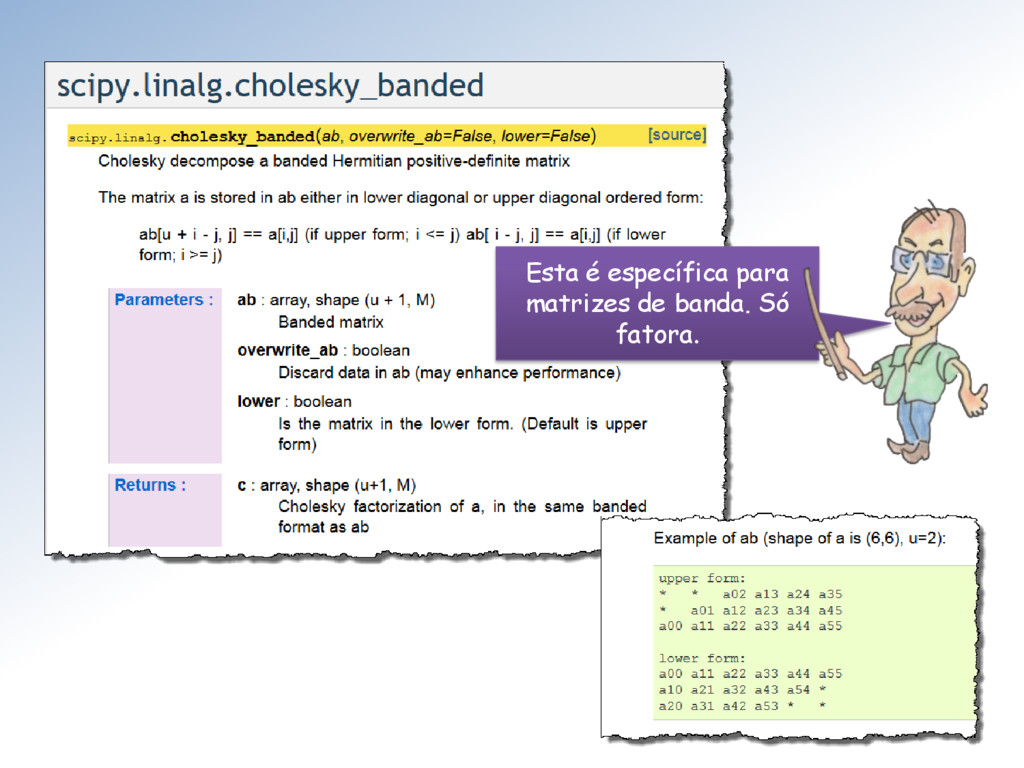
= 0 para − > . E possui banda superior k, quando = 0 para − > . = × × 0 0 0 × × × 0 0 × 0 0 × × 0 × × 0 × × × × × × Eis uma matriz A com banda inferior 2 (em laranja) e banda superior 1 (em verde):
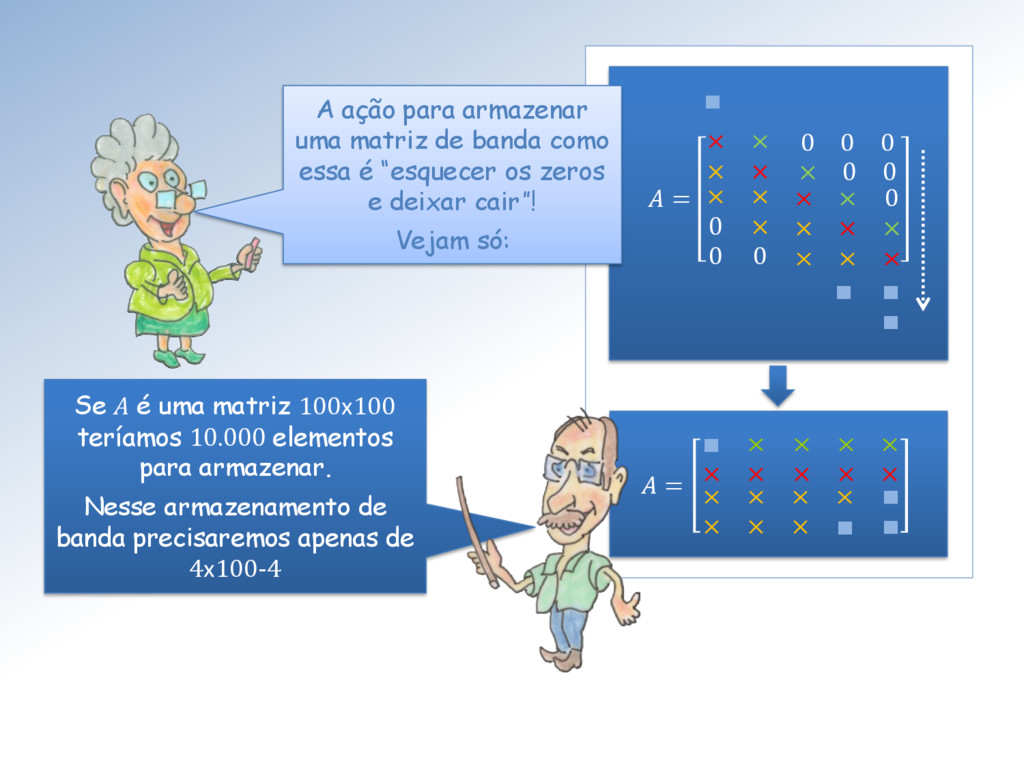
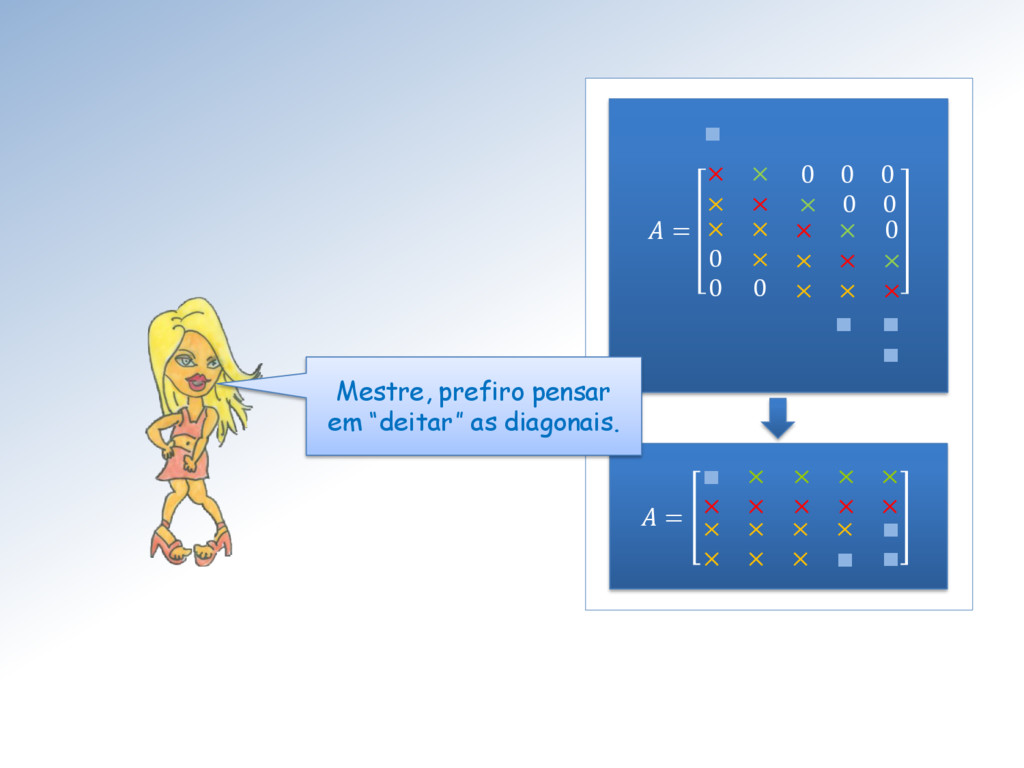
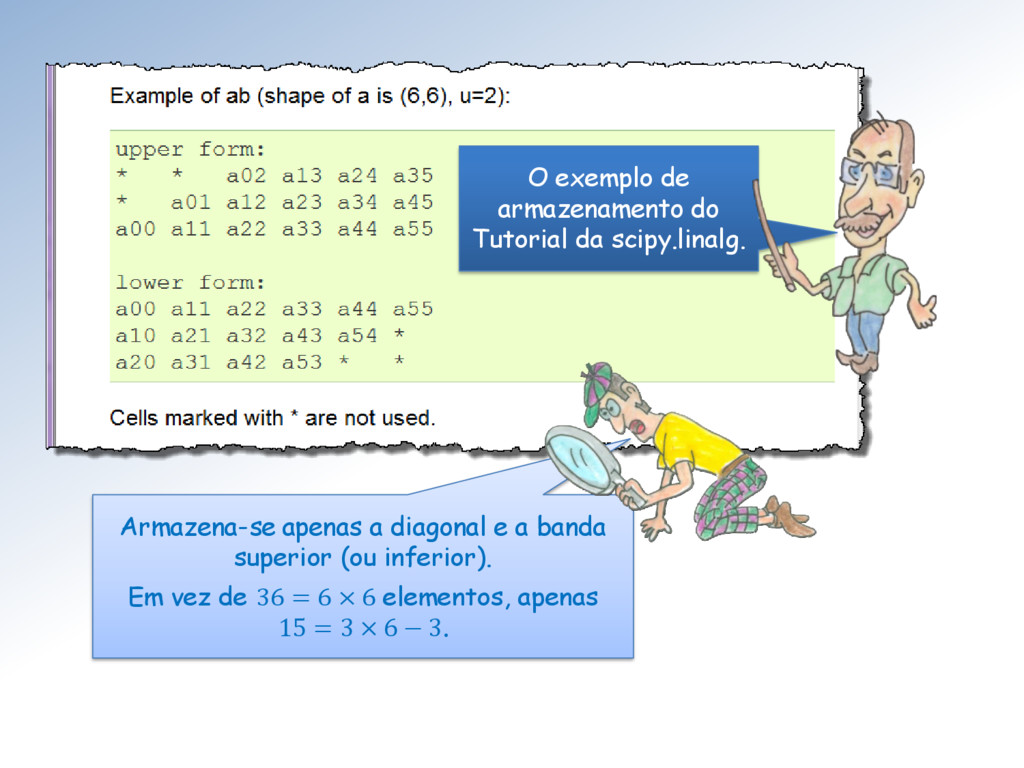
0 × 0 0 × × 0 × × 0 × × × × × × = ∎ × × × × × × × × × × × × × × × × ∎ ∎ ∎ Se A é uma matriz 100x100 teríamos 10.000 elementos para armazenar. Nesse armazenamento de banda precisaremos apenas de 4x100-4 ∎ ∎ ∎ ∎ A ação para armazenar uma matriz de banda como essa é “esquecer os zeros e deixar cair”! Vejam só:
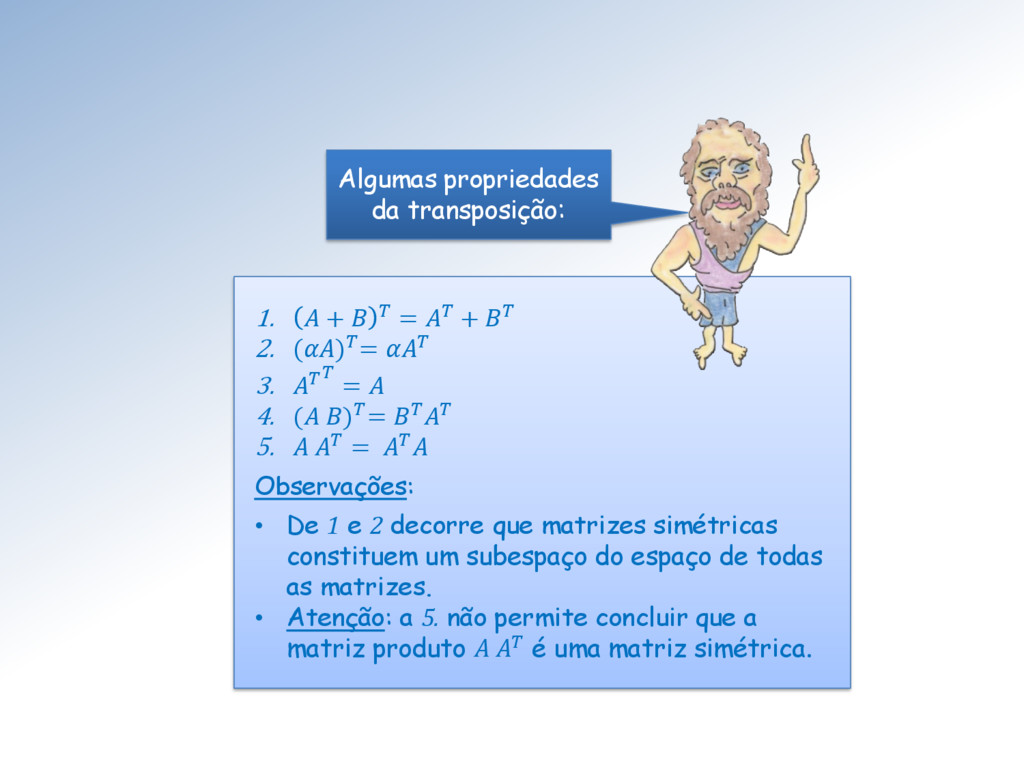
)= 5. = Observações: • De 1 e 2 decorre que matrizes simétricas constituem um subespaço do espaço de todas as matrizes. • Atenção: a 5. não permite concluir que a matriz produto é uma matriz simétrica. Algumas propriedades da transposição:
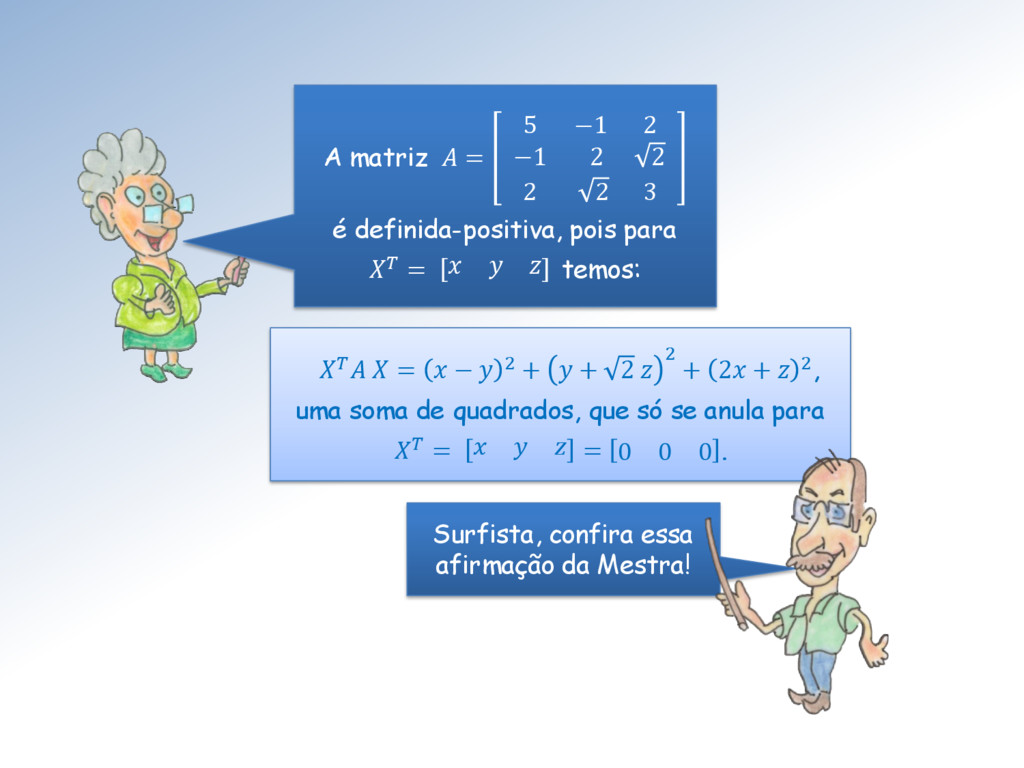
2 3 é definida-positiva, pois para = temos: = − 2 + + 2 2 + 2 + 2, uma soma de quadrados, que só se anula para = = 0 0 0 . Surfista, confira essa afirmação da Mestra!
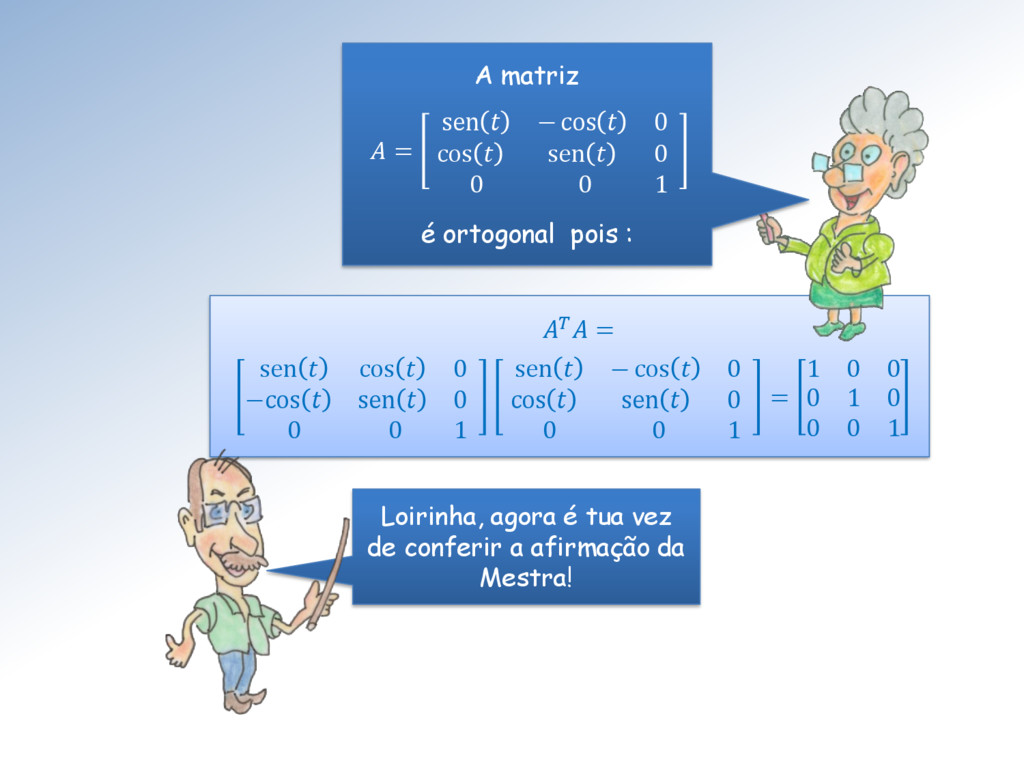
sen − cos 0 cos sen 0 0 0 1 = 1 0 0 0 1 0 0 0 1 Loirinha, agora é tua vez de conferir a afirmação da Mestra! A matriz = sen − cos 0 cos sen 0 0 0 1 é ortogonal pois :
anotada AH, é definida por = [ത ]. É a conjugada da transposta. Adjunta Quando satisfaz: = . É a correspondente de uma matriz simétrica, com elementos complexos, Hermitiana, ou auto-adjunta Quando sua adjunta é a inversa: = −1 ⟺ = = Unitária
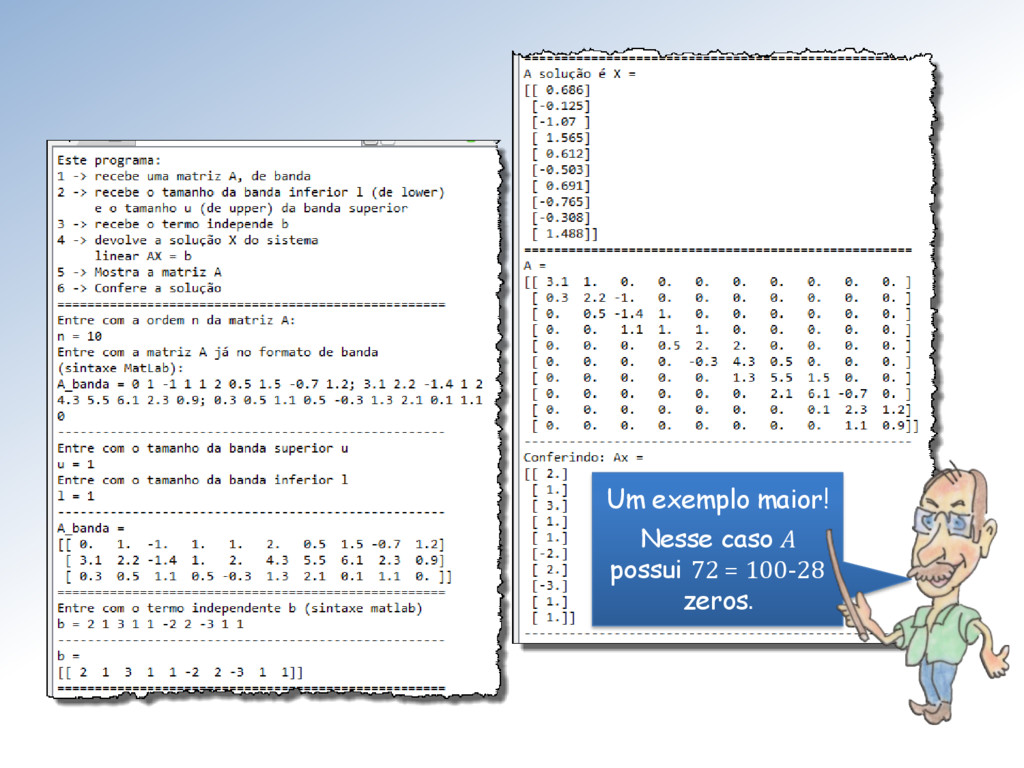
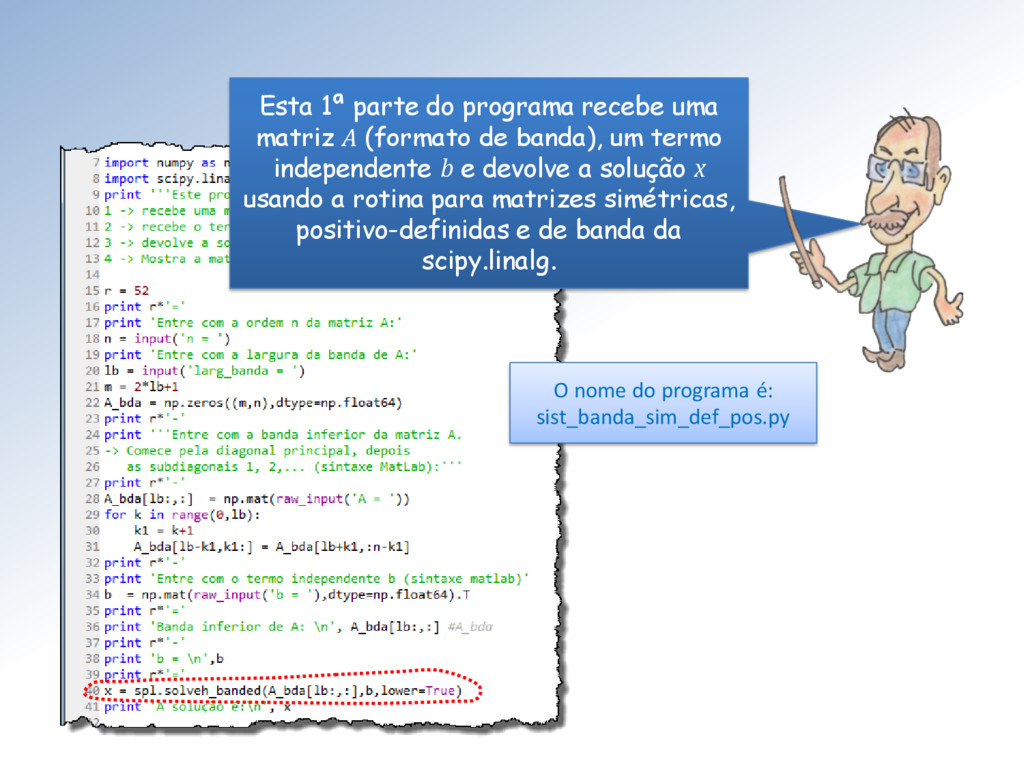
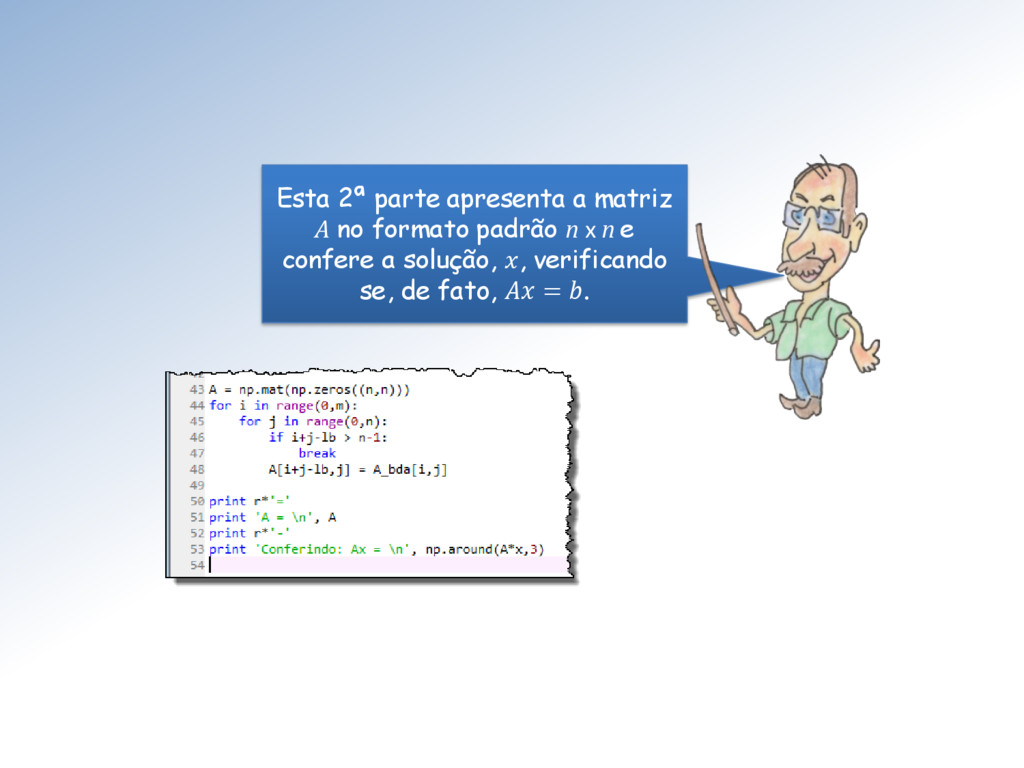
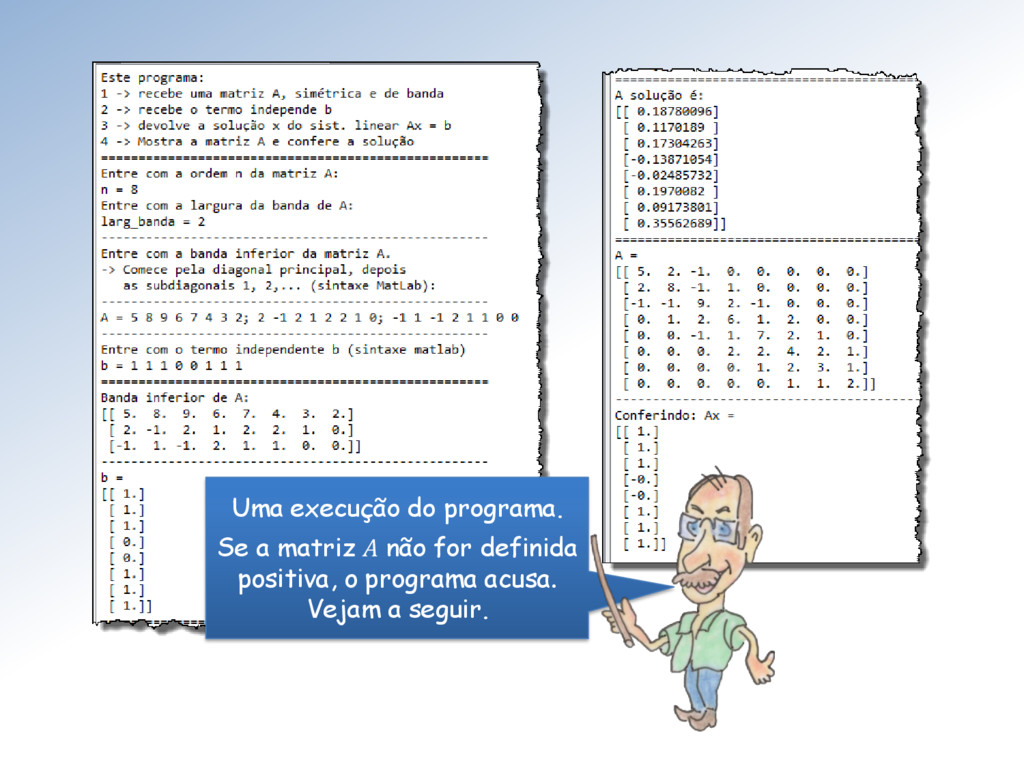
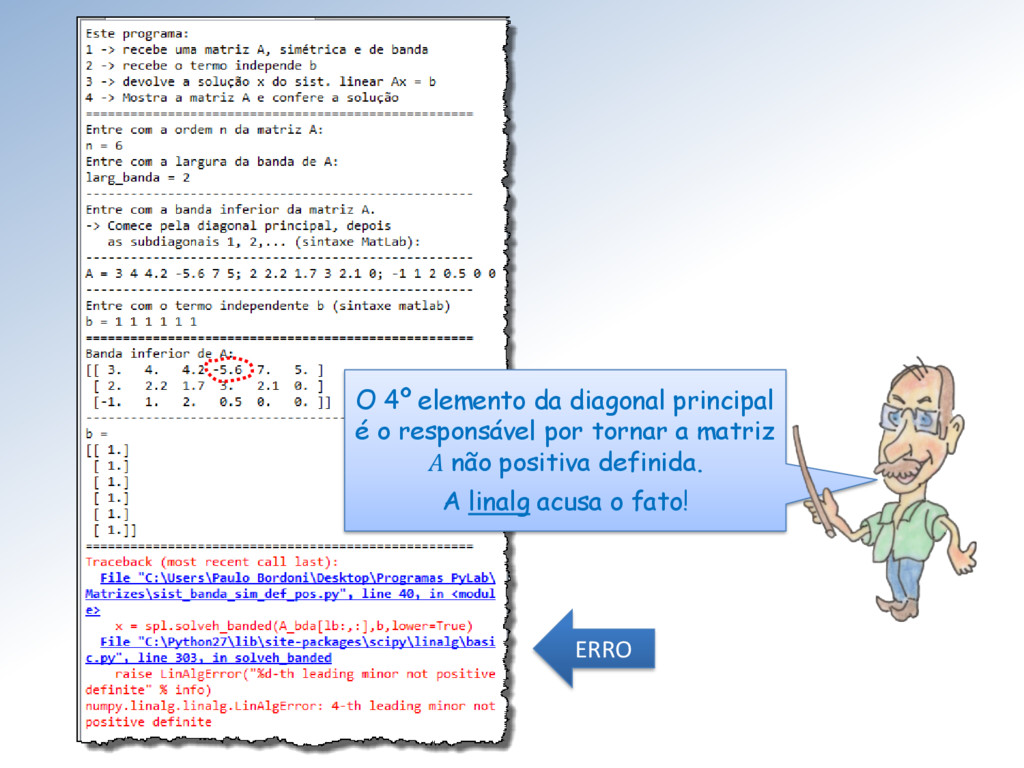
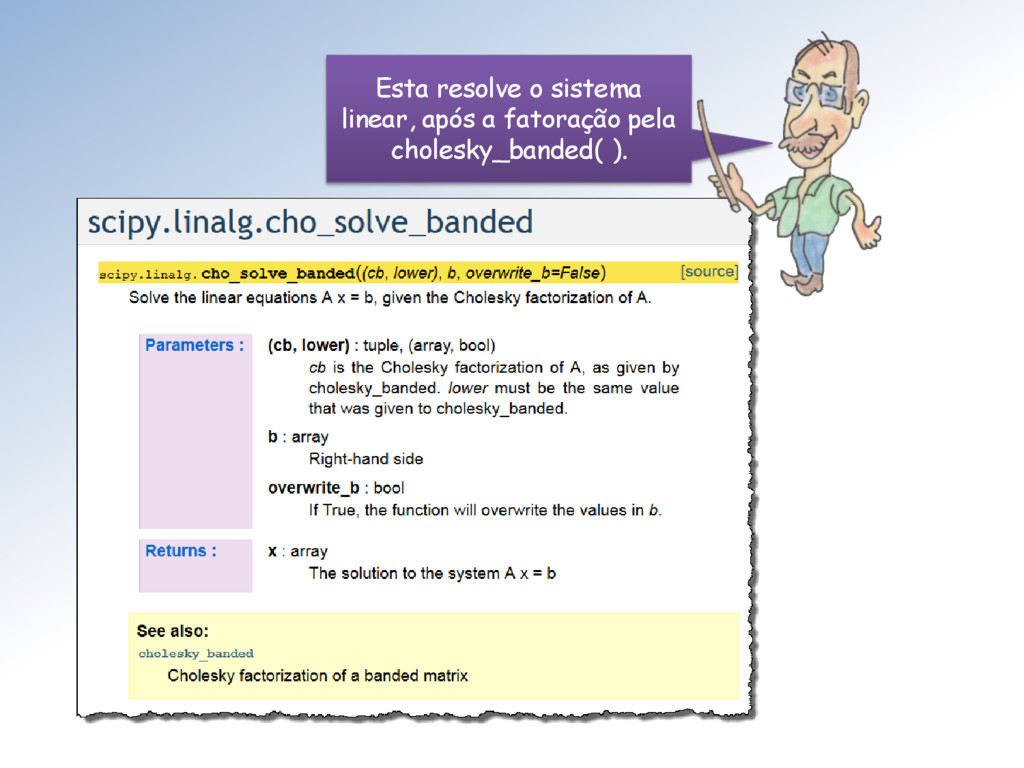
de banda), um termo independente b e devolve a solução x usando a rotina para matrizes simétricas, positivo-definidas e de banda da scipy.linalg. O nome do programa é: sist_banda_sim_def_pos.py
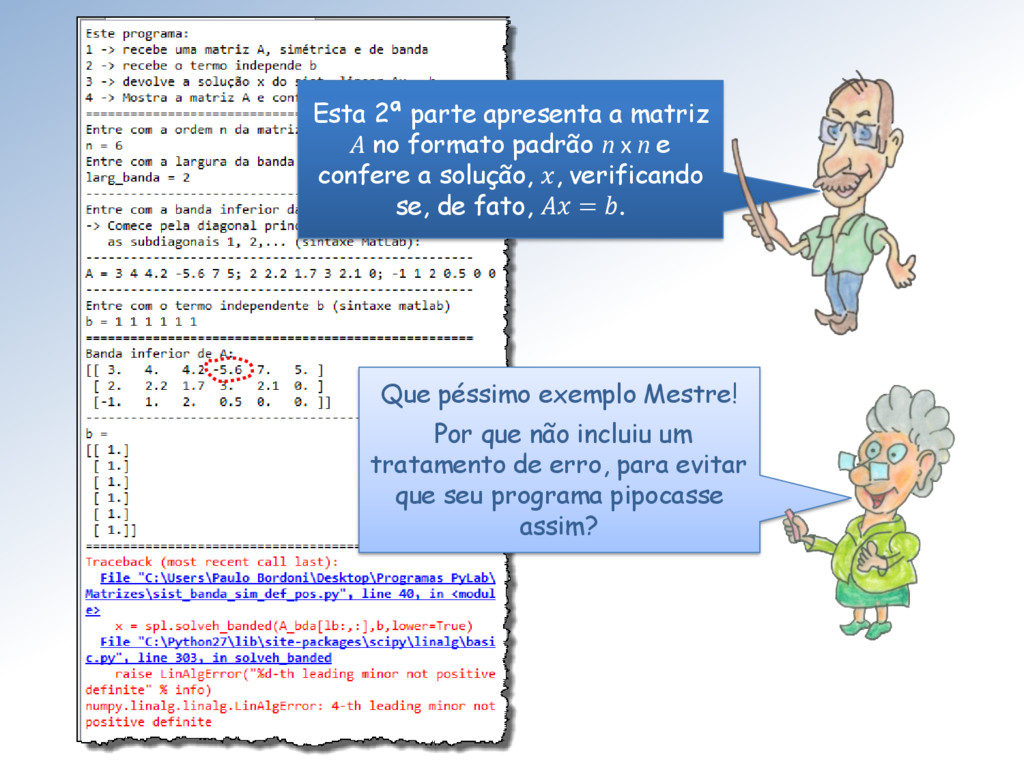
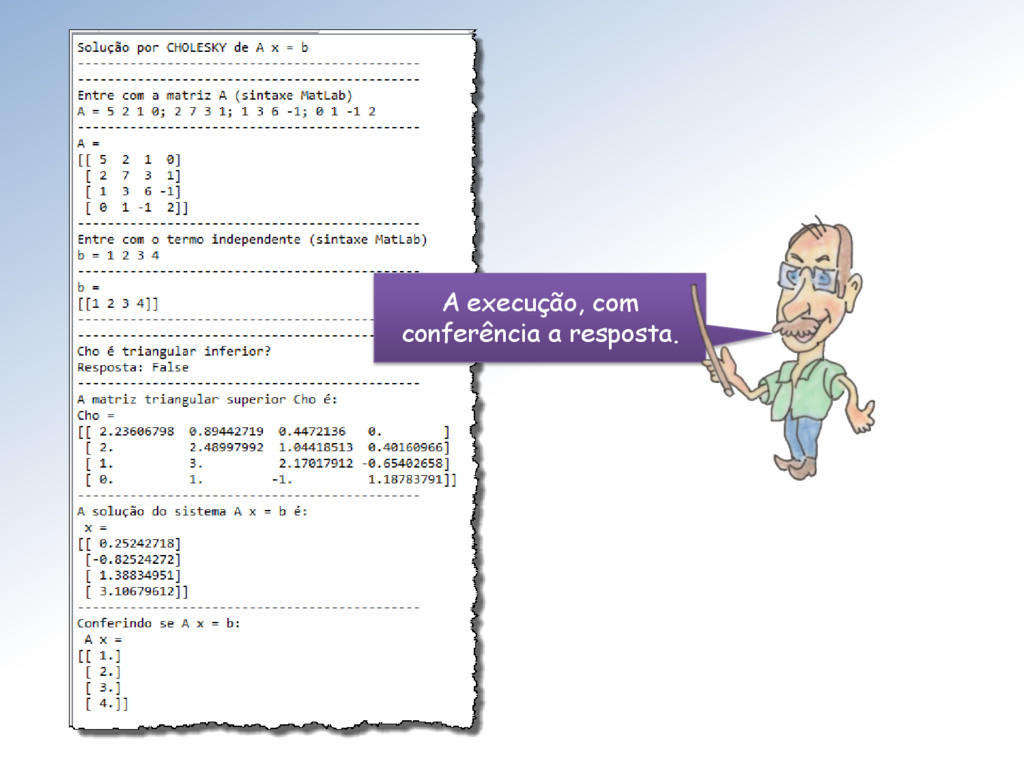
de erro, para evitar que seu programa pipocasse assim? Esta 2ª parte apresenta a matriz A no formato padrão n x n e confere a solução, , verificando se, de fato, = .
de fatoração LU? Antes do Mestre te responder, jovem, proponho que discuta com seus colegas sobre essa cultura de levar vantagem em tudo. Grande Filósofo!
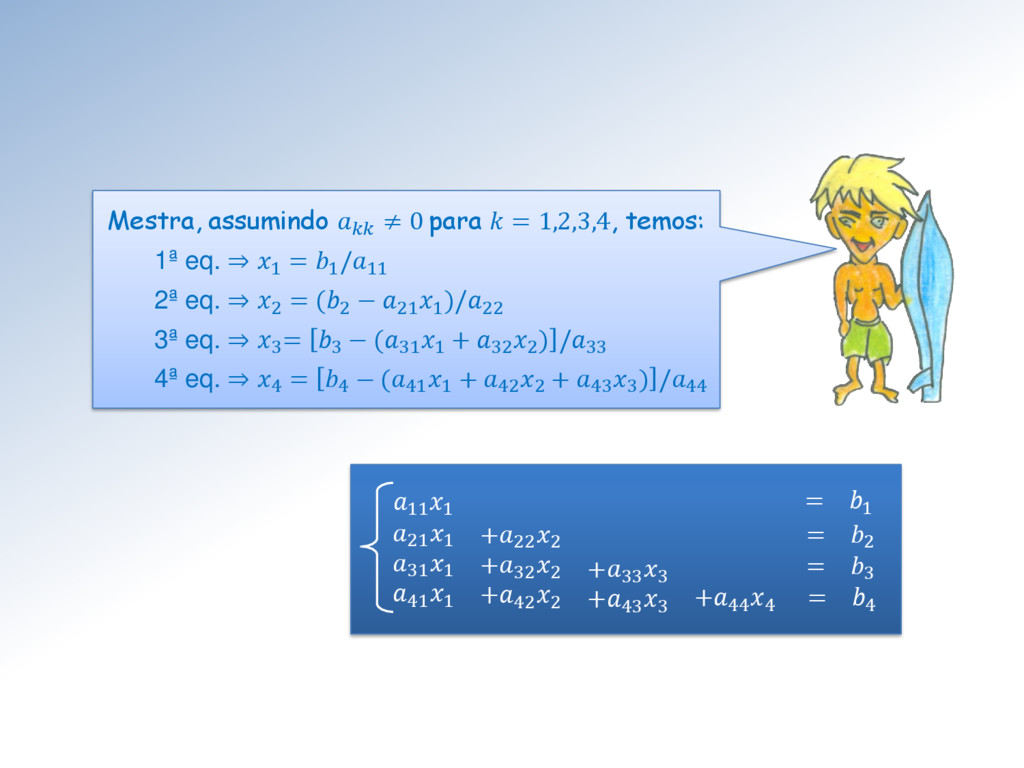
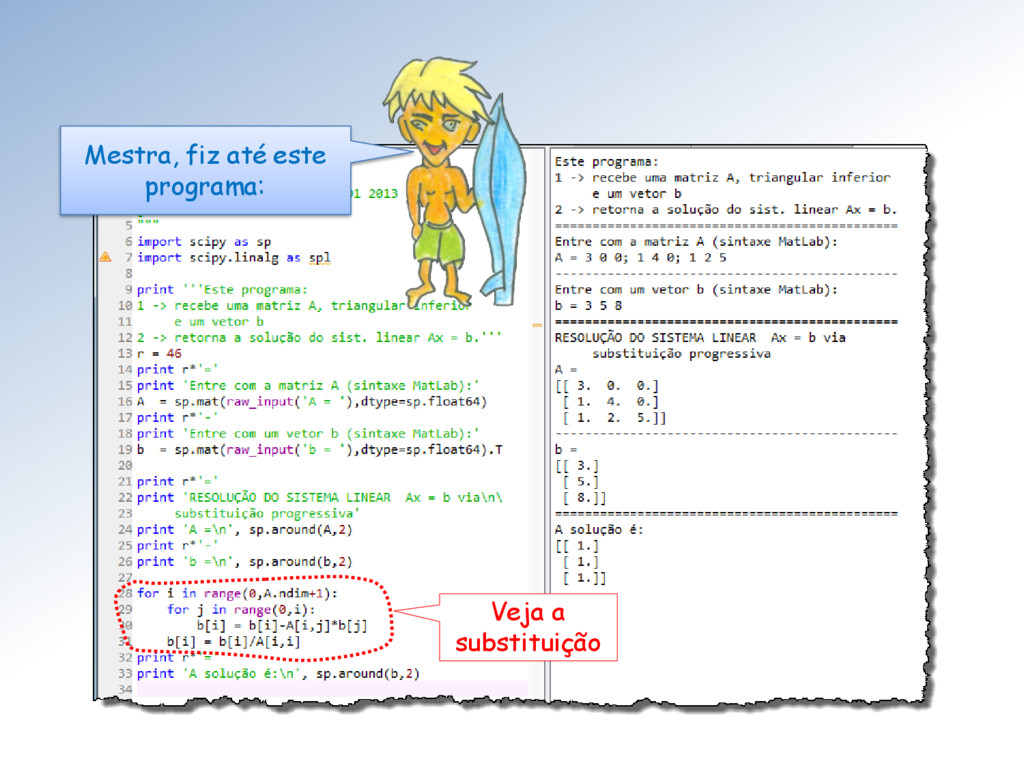
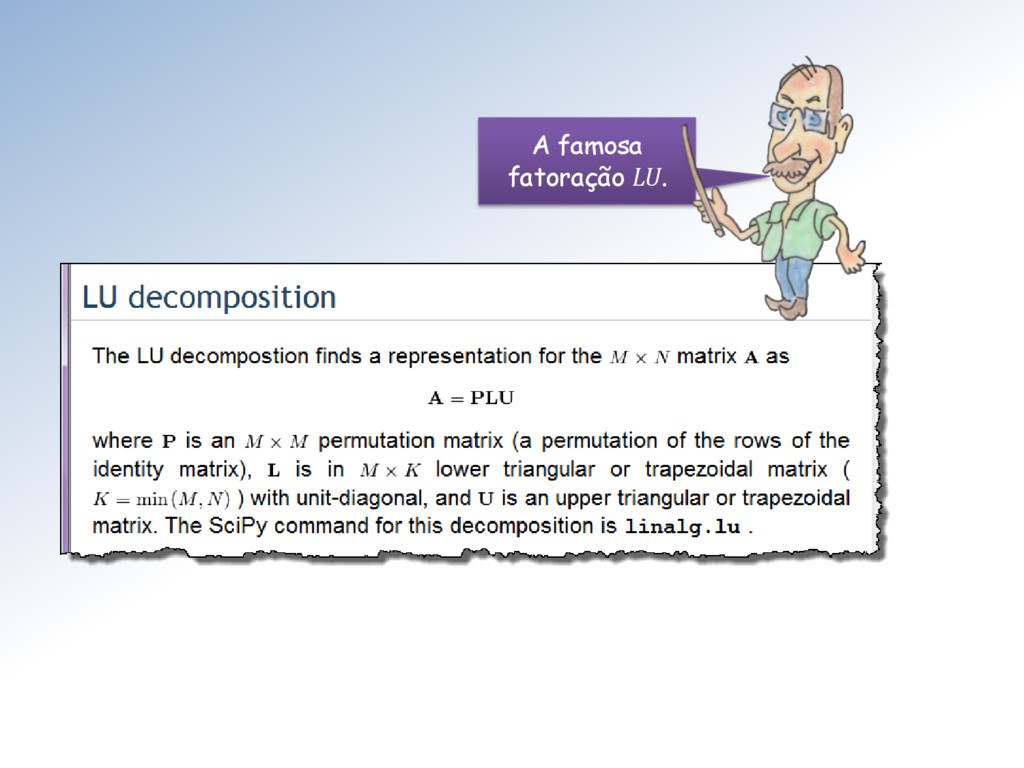
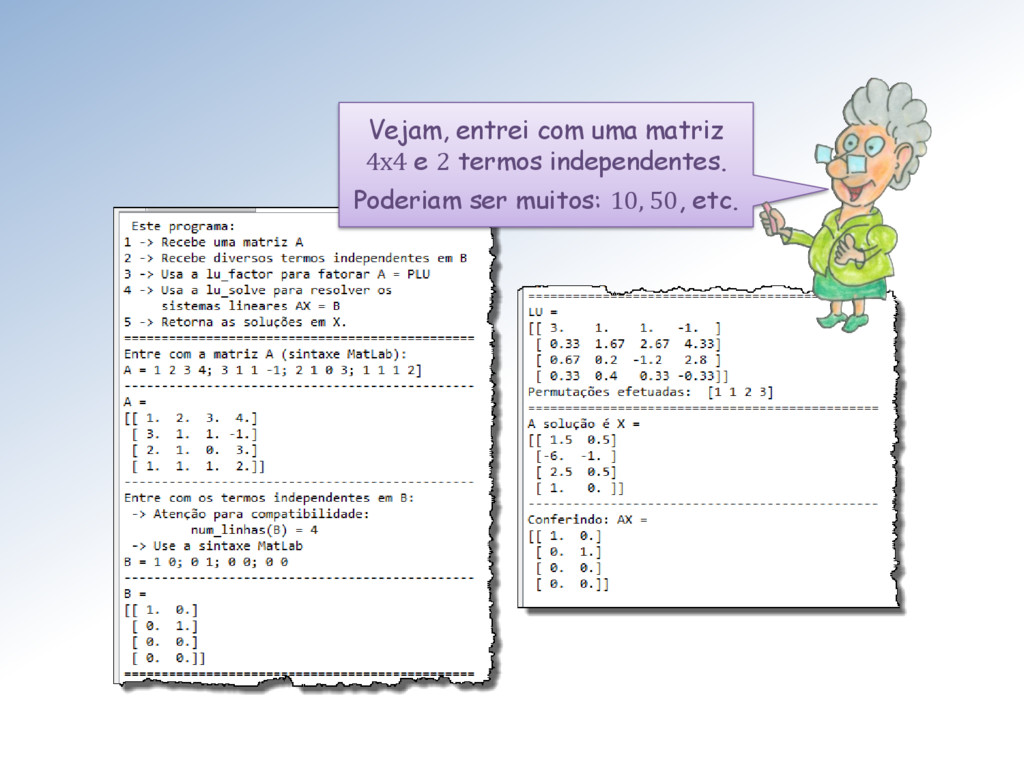
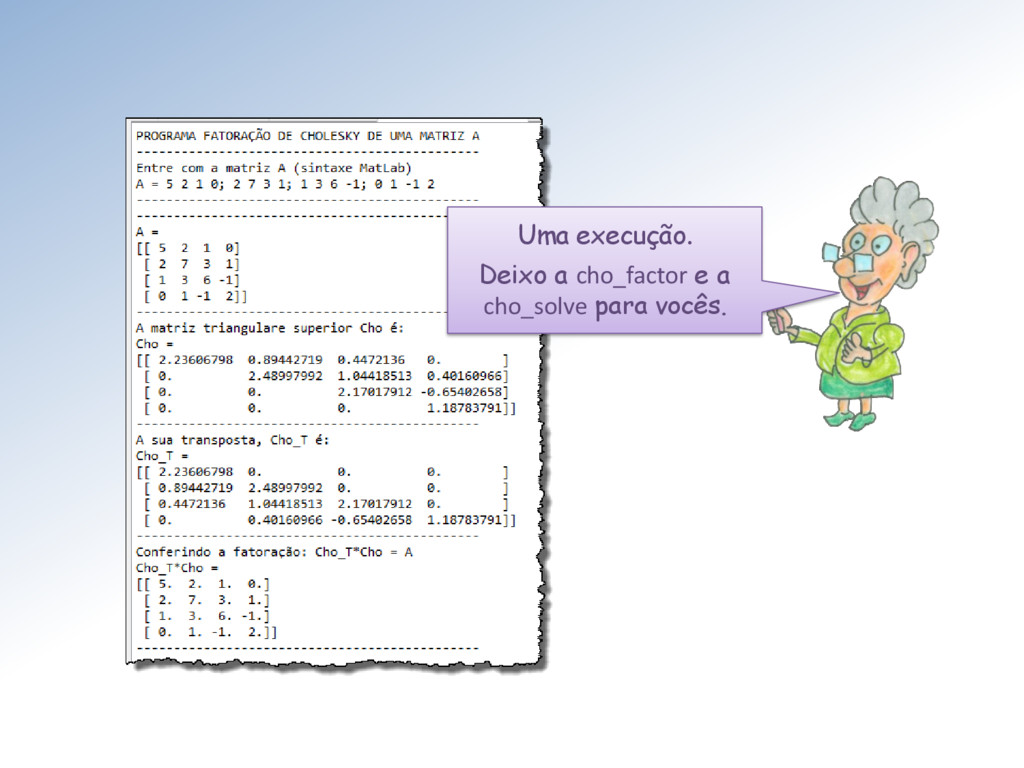
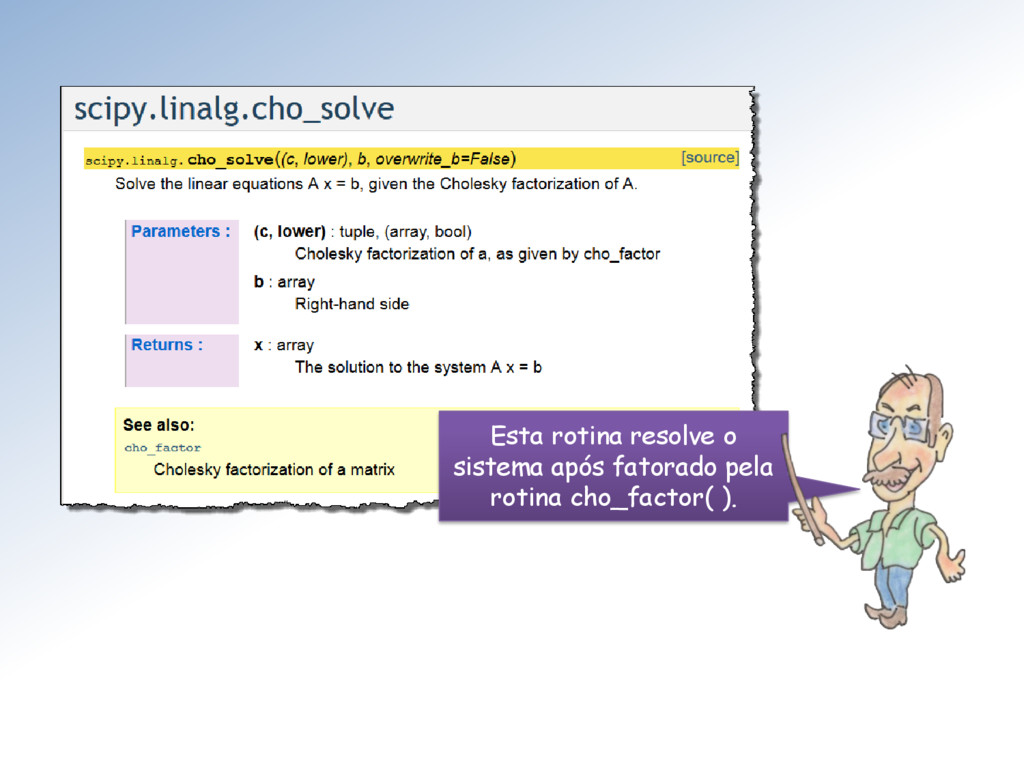
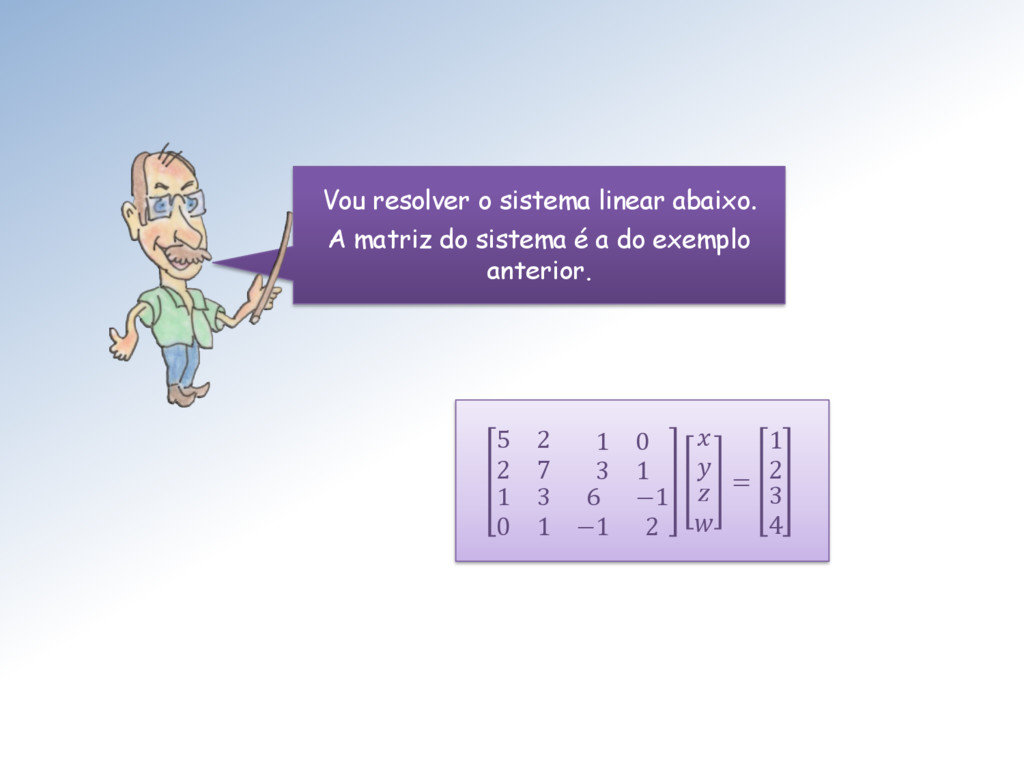
o sistema linear = é equivalente a resolver = . Então resolvemos primeiro o sistema = e depois o = . Note que esses dois são sistemas triangulares, facílimos de resolver! Conforme já vimos, o maior trabalho reside em fatorar (i.é, efetuar o processo de eliminação).
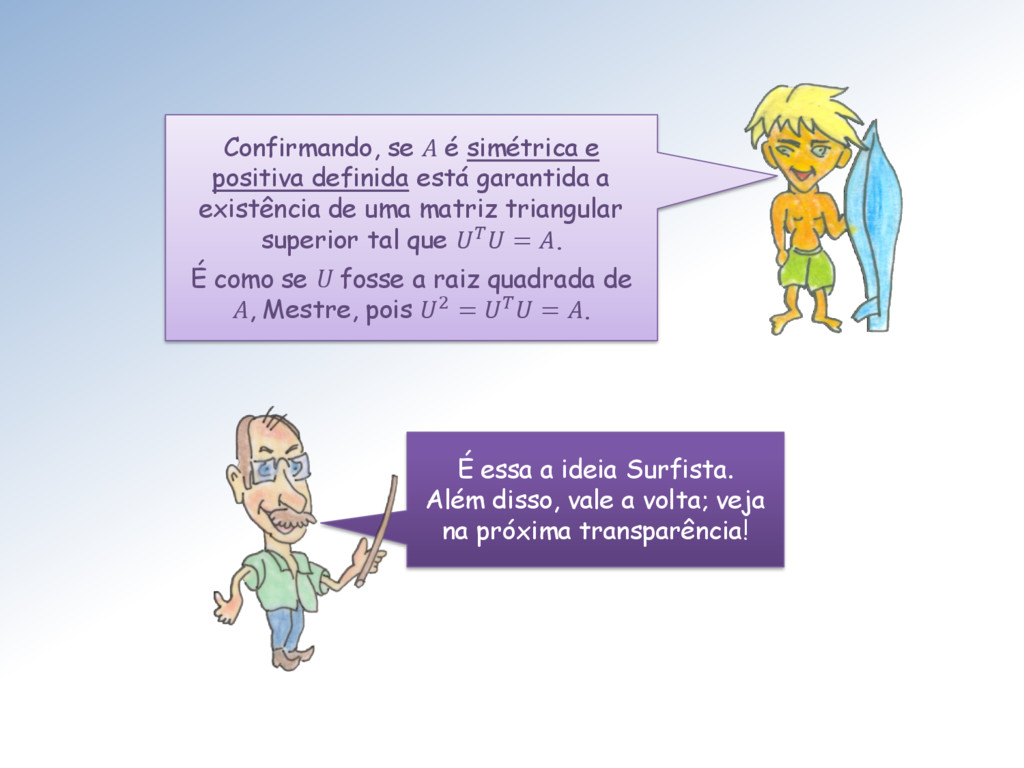
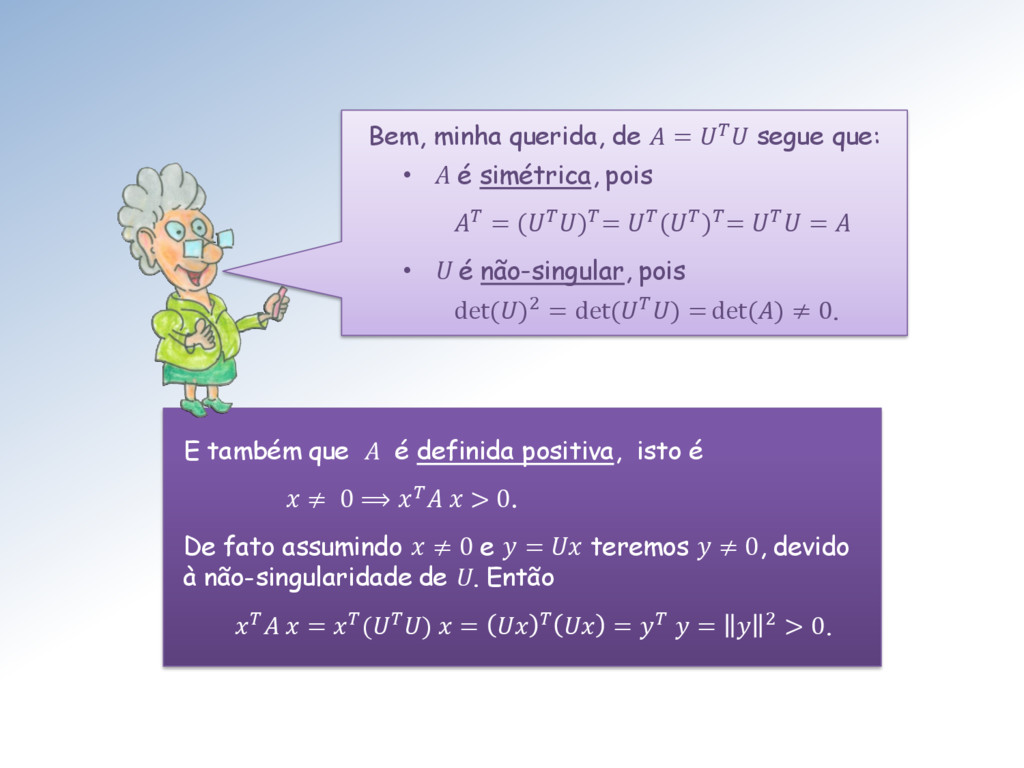
veja na próxima transparência! Confirmando, se A é simétrica e positiva definida está garantida a existência de uma matriz triangular superior tal que = . É como se U fosse a raiz quadrada de A, Mestre, pois 2 = = .
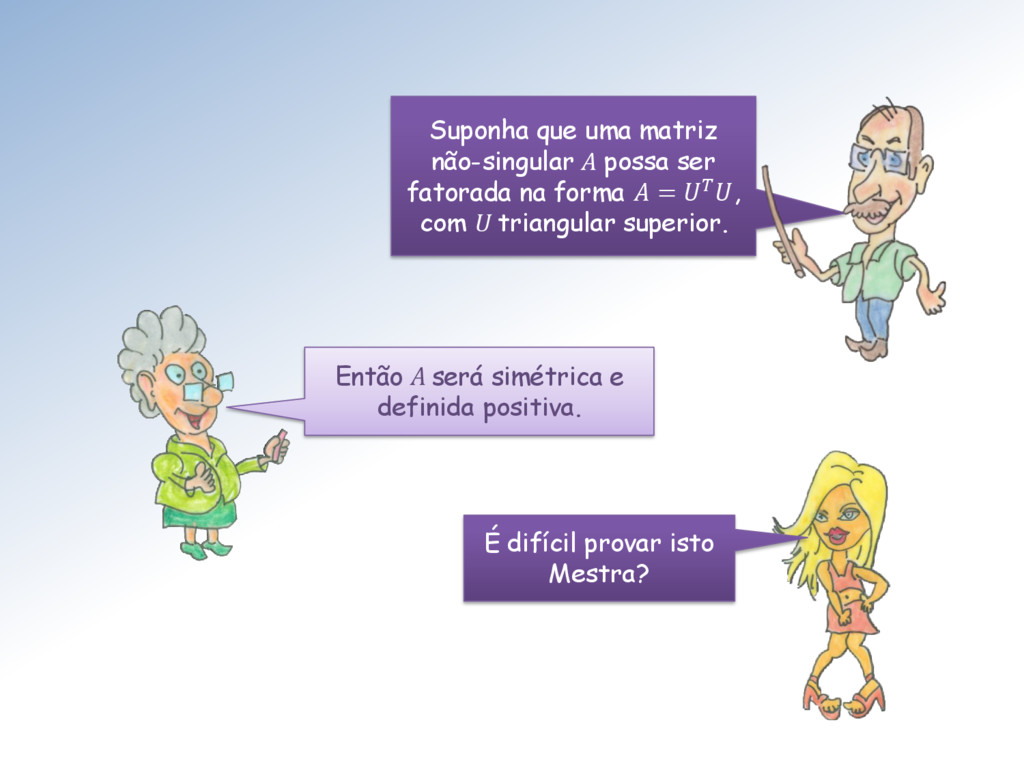
0 ⟹ > 0. De fato assumindo ≠ 0 e = teremos ≠ 0, devido à não-singularidade de U. Então = () = = = 2 > 0. Bem, minha querida, de = segue que: • A é simétrica, pois = ()= ()= = • U é não-singular, pois det()2 = det() = det() ≠ 0.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Aliás existe toda uma fauna de matrizes = [ ]](https://files.speakerdeck.com/presentations/a4eb06ba4e3641fb89058a9062504d0a/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Uma matriz = [ ] possui banda inferior k quando](https://files.speakerdeck.com/presentations/a4eb06ba4e3641fb89058a9062504d0a/slide_24.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Um zoológico bem complexo: A adjunta de = [ ],](https://files.speakerdeck.com/presentations/a4eb06ba4e3641fb89058a9062504d0a/slide_38.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}