récupération de porteuse à décision dirigée pour les constellations 16-QAM Adel METREF IETR / SCEE-Supélec Jeudi 7 Juin 2007 2 UMR 6164 2 Problématique Globalement, les travaux menés dans le domaine de la synchronisation de phase se concentrent autour de deux axes: • Nouveaux détecteurs/estimateurs de phase. • Décision utilisées par le détecteur/estimateur de phase. Agir sur la décision dans le but d’améliorer les performances du détecteur de phase.
de synchronisation de phase, on distingue deux modes de fonctionnement: • Acquisition (ou accrochage) de la phase (acquisition). • Poursuite des variations de la phase (tracking). On s’intéresse aux performances de la synchronisation en mode d’acquisition . 4 UMR 6164 4 Sommaire • Présentation du contexte • Le détecteur de phase classique • Le détecteur de phase optimisé (hiérarchique) • Comparaison des performances - Courbe en S - Robustesse aux erreurs de fréquence • Conclusions et perspectives
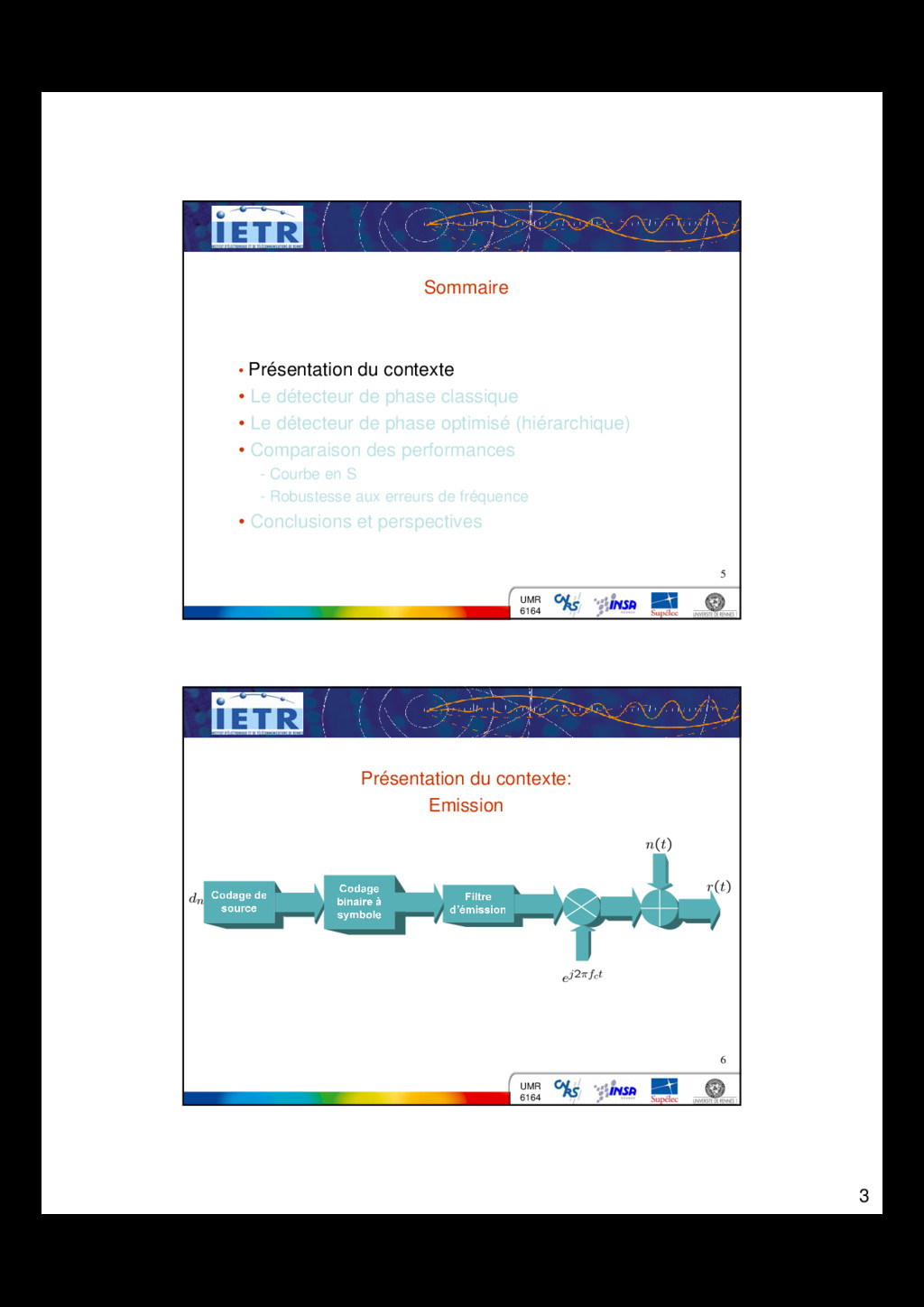
• Le détecteur de phase classique • Le détecteur de phase optimisé (hiérarchique) • Comparaison des performances - Courbe en S - Robustesse aux erreurs de fréquence • Conclusions et perspectives 6 UMR 6164 6 Présentation du contexte: Emission
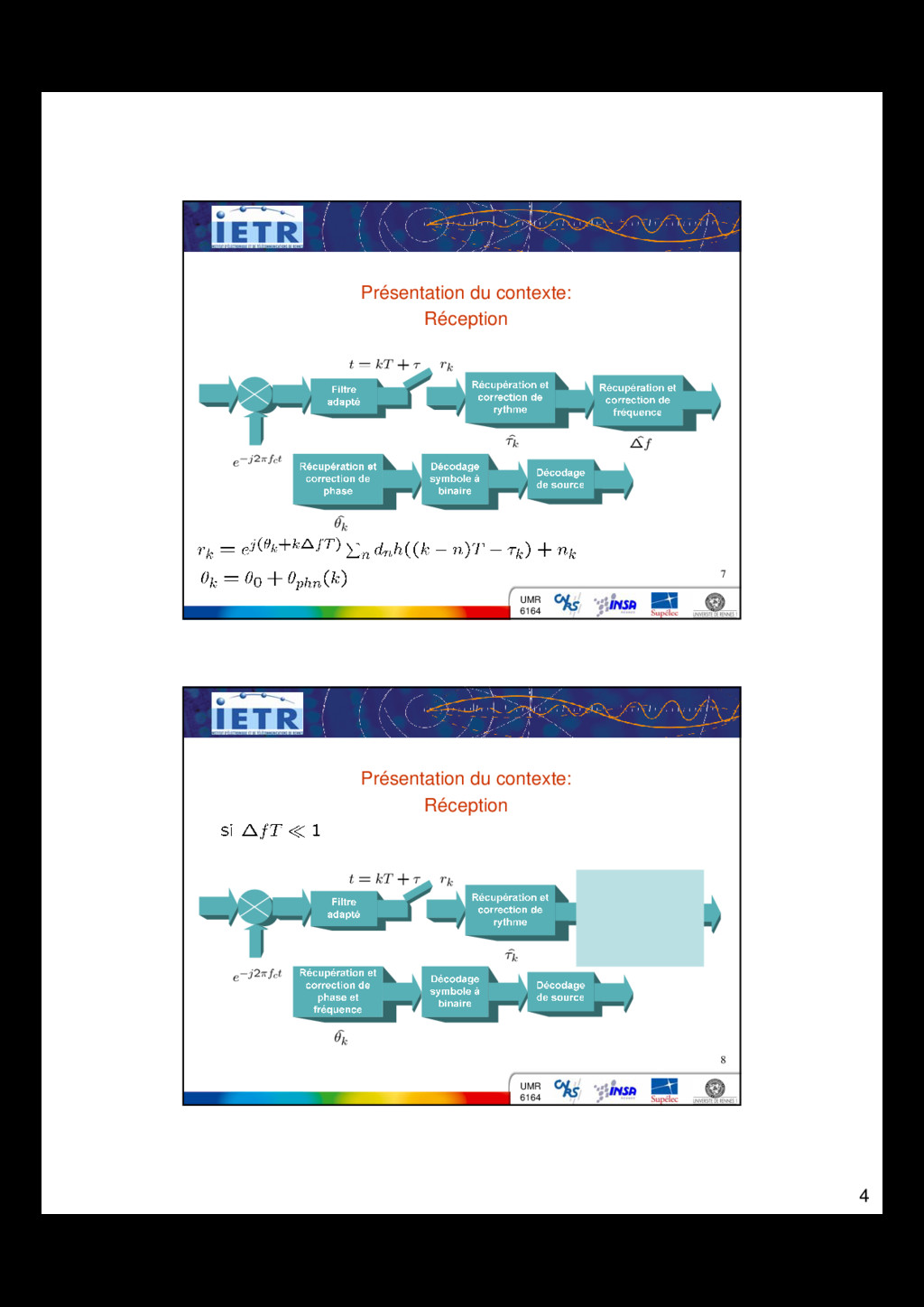
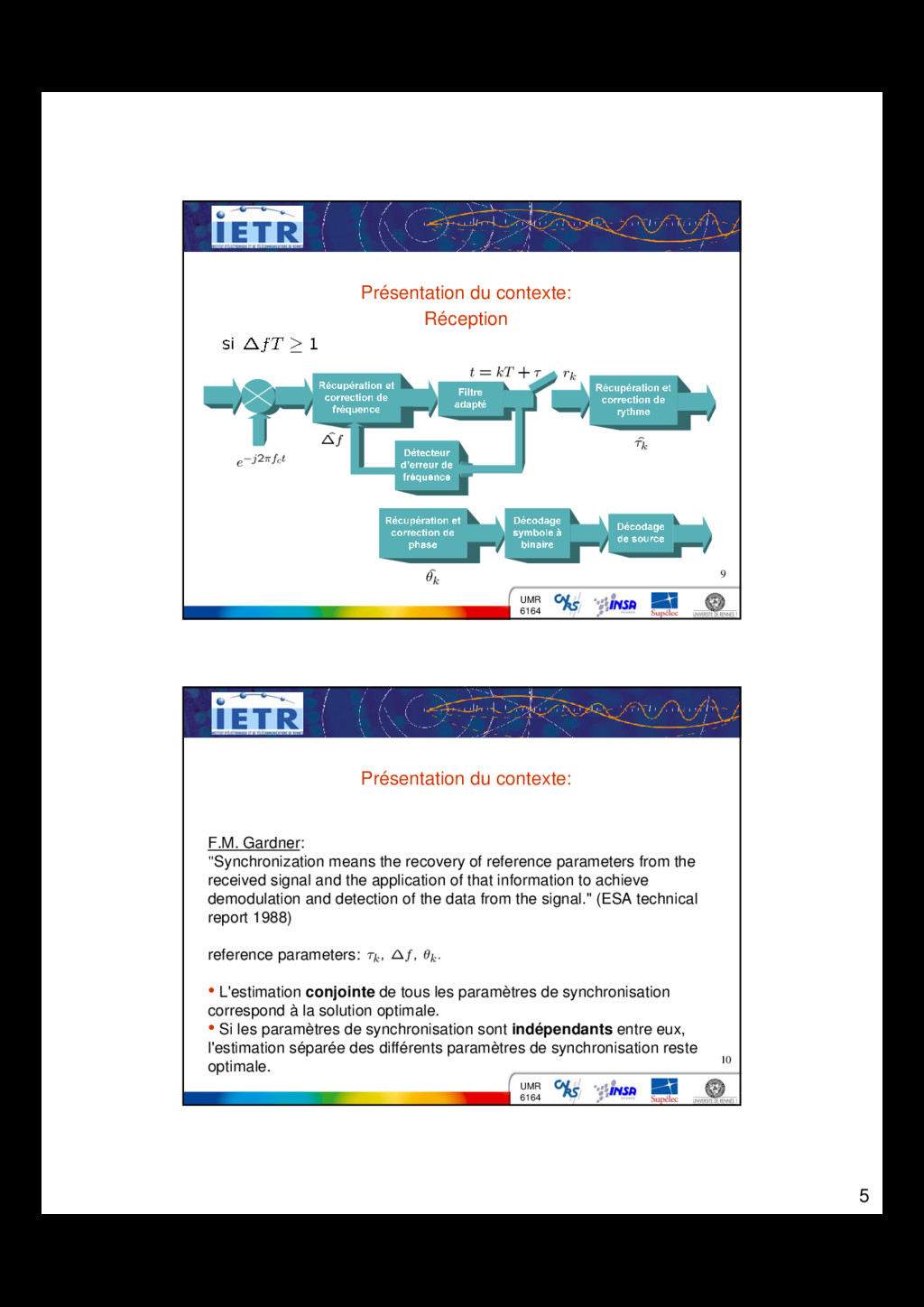
UMR 6164 10 Présentation du contexte: F.M. Gardner: "Synchronization means the recovery of reference parameters from the received signal and the application of that information to achieve demodulation and detection of the data from the signal." (ESA technical report 1988) reference parameters: • L'estimation conjointe de tous les paramètres de synchronisation correspond à la solution optimale. • Si les paramètres de synchronisation sont indépendants entre eux, l'estimation séparée des différents paramètres de synchronisation reste optimale.
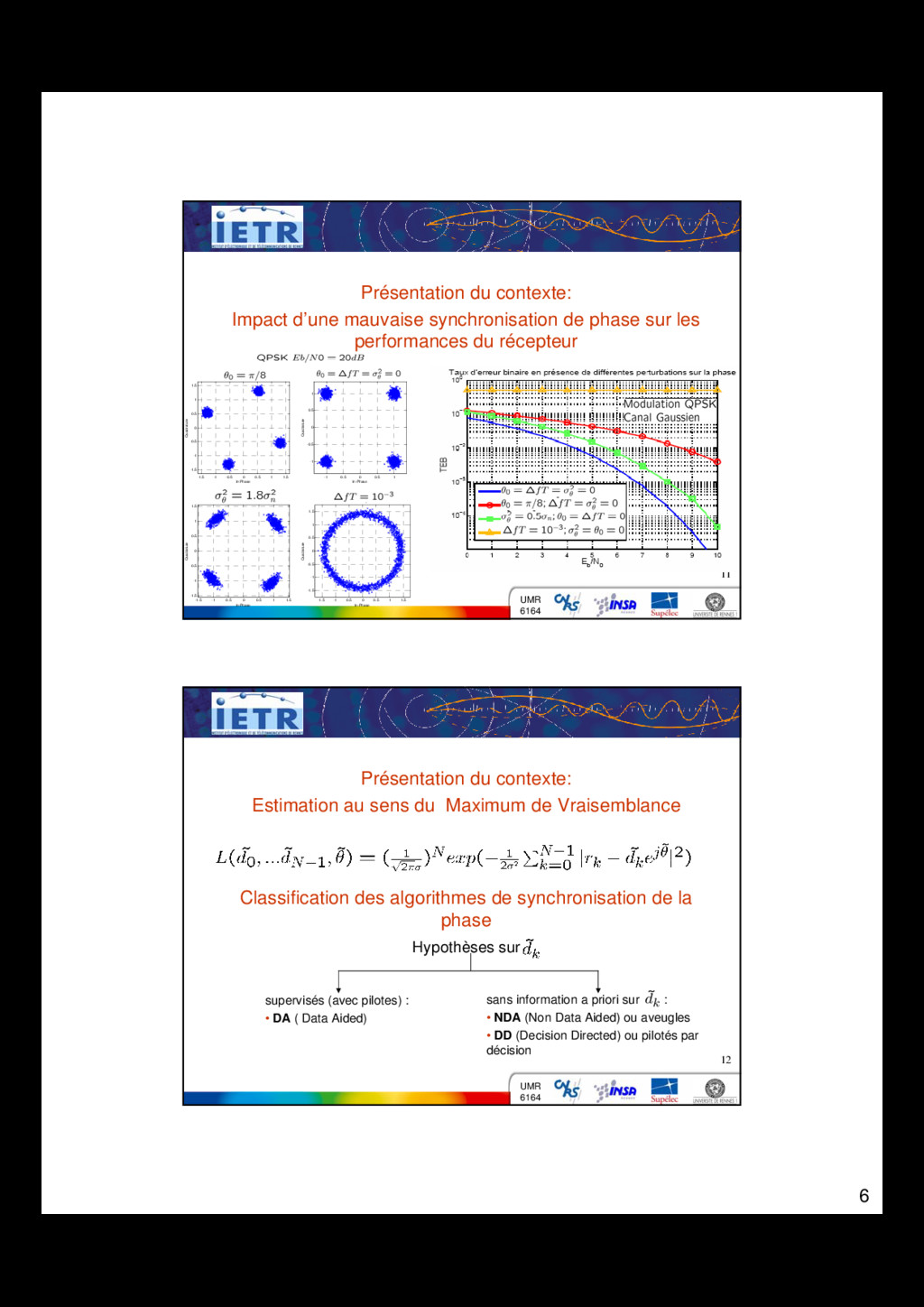
algorithmes de synchronisation de la phase Inconvénients des différentes techniques: • DA : - Réduction de la capacité du système. • NDA : - Ambiguïté de phase et faux points d’accrochage. - Dégradation du SNR (dans les méthodes utilisants des non- linéarités). DD : -Ambiguïté de phase et faux points d’accrochage. - Erreurs de décision (à faible SNR). 14 UMR 6164 14 Présentation du contexte: Classification des algorithmes de synchronisation de la phase Techniques DD : • HDD (Hard DD) ou décision dure. • SDD (Soft DD) ou décision souple. • Utilisation d’une information de décodage canal : -"Tentative Decision" ou décision prématurée. - "Turbo-synchronisation". - Intégration de la synchronisation dans le décodeur - Synchronisation à l’aide d’un code de parité (Mathieu Dervin 2005)
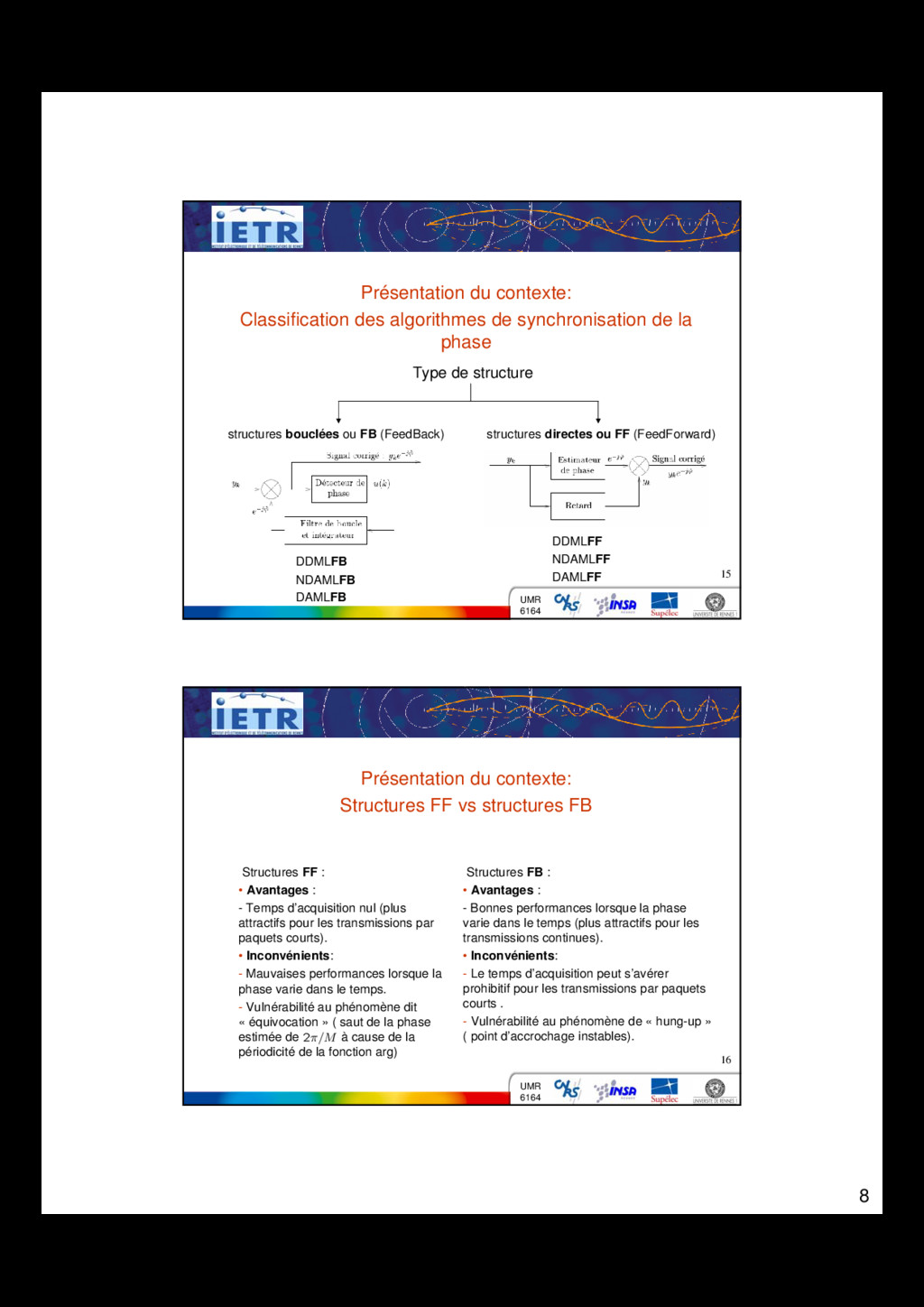
algorithmes de synchronisation de la phase Type de structure DDMLFF NDAMLFF DAMLFF DDMLFB NDAMLFB DAMLFB structures directes ou FF (FeedForward) structures bouclées ou FB (FeedBack) 16 UMR 6164 16 Présentation du contexte: Structures FF vs structures FB Structures FF : • Avantages : - Temps d’acquisition nul (plus attractifs pour les transmissions par paquets courts). • Inconvénients: - Mauvaises performances lorsque la phase varie dans le temps. - Vulnérabilité au phénomène dit « équivocation » ( saut de la phase estimée de à cause de la périodicité de la fonction arg) Structures FB : • Avantages : - Bonnes performances lorsque la phase varie dans le temps (plus attractifs pour les transmissions continues). • Inconvénients: - Le temps d’acquisition peut s’avérer prohibitif pour les transmissions par paquets courts . - Vulnérabilité au phénomène de « hung-up » ( point d’accrochage instables).
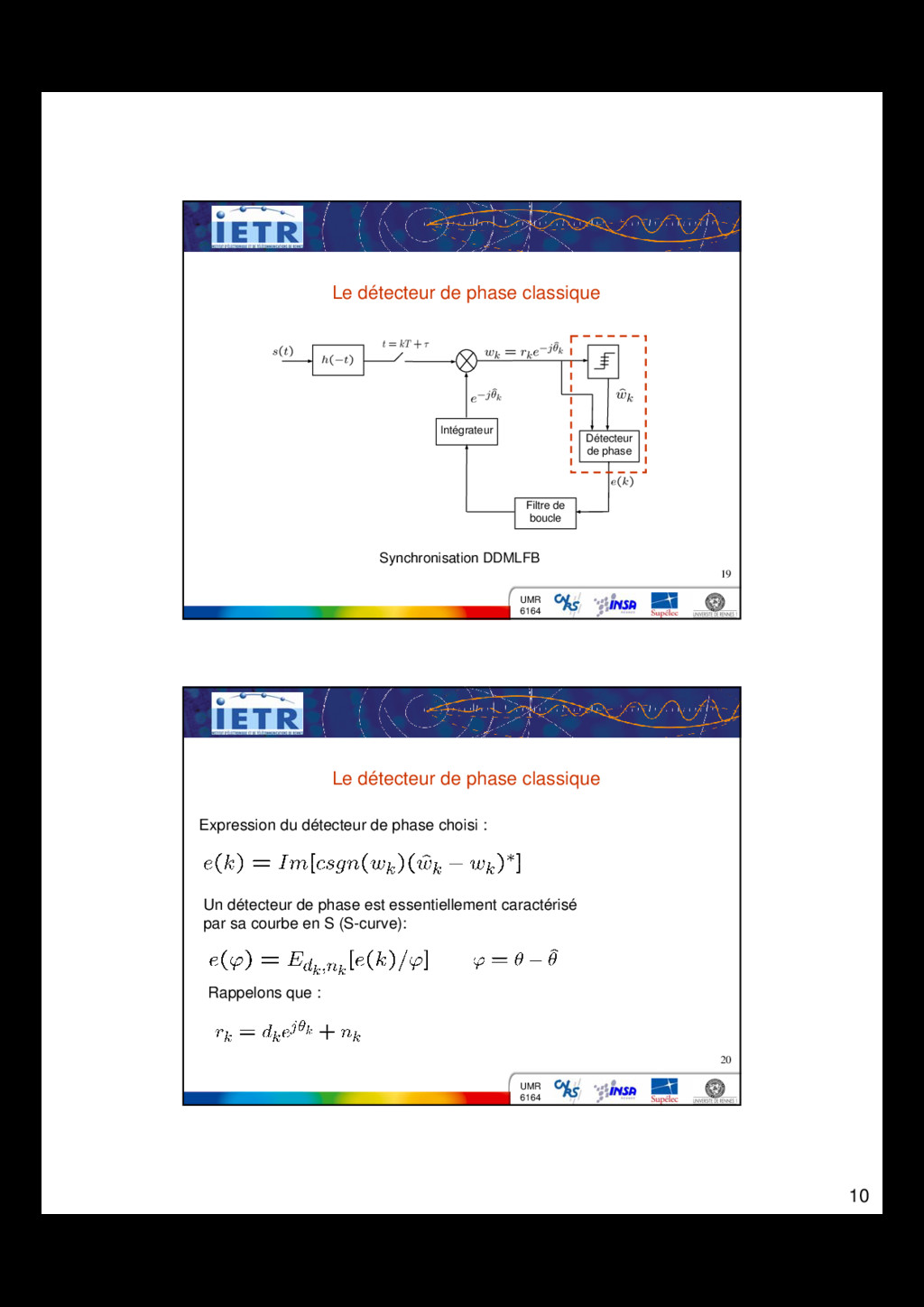
choix du type de la structure et de la technique de synchronisation à utiliser dépend essentiellement des contraintes de l’application visée. • L’approche adoptée: DDMLFB. • Le détecteur de phase est la clef de voûte des structures bouclées, les performances de la synchronisation en mode d’acquisition et en mode de poursuite en sont directement liées. 18 UMR 6164 18 Sommaire • Présentation du contexte • Le détecteur de phase classique • Le détecteur de phase optimisé (hiérarchique) • Comparaison des performances - Courbe en S - Robustesse aux erreurs de fréquence • Conclusions et perspectives
Détecteur de phase Filtre de boucle Intégrateur Synchronisation DDMLFB 20 UMR 6164 20 Le détecteur de phase classique Expression du détecteur de phase choisi : Un détecteur de phase est essentiellement caractérisé par sa courbe en S (S-curve): Rappelons que :
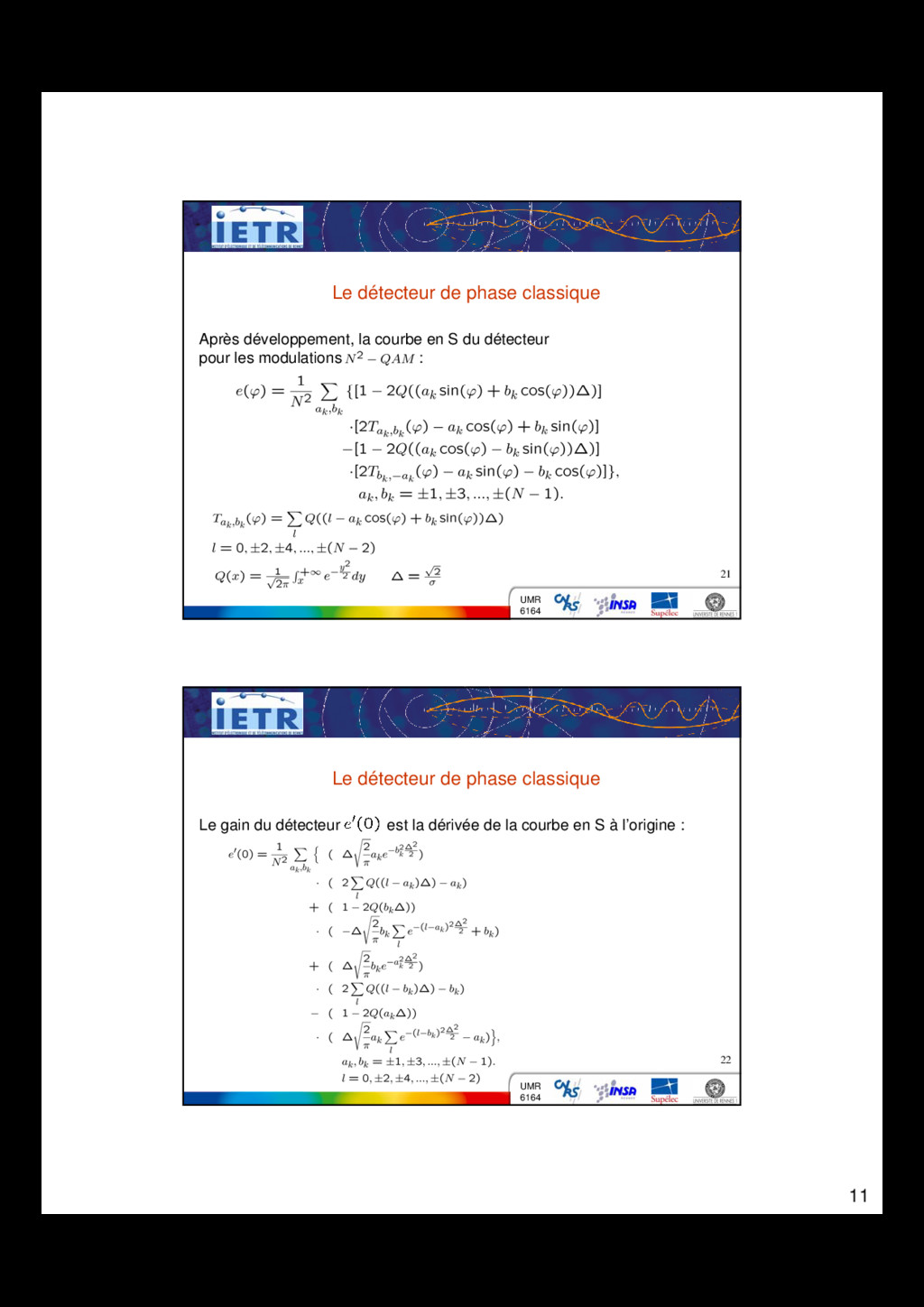
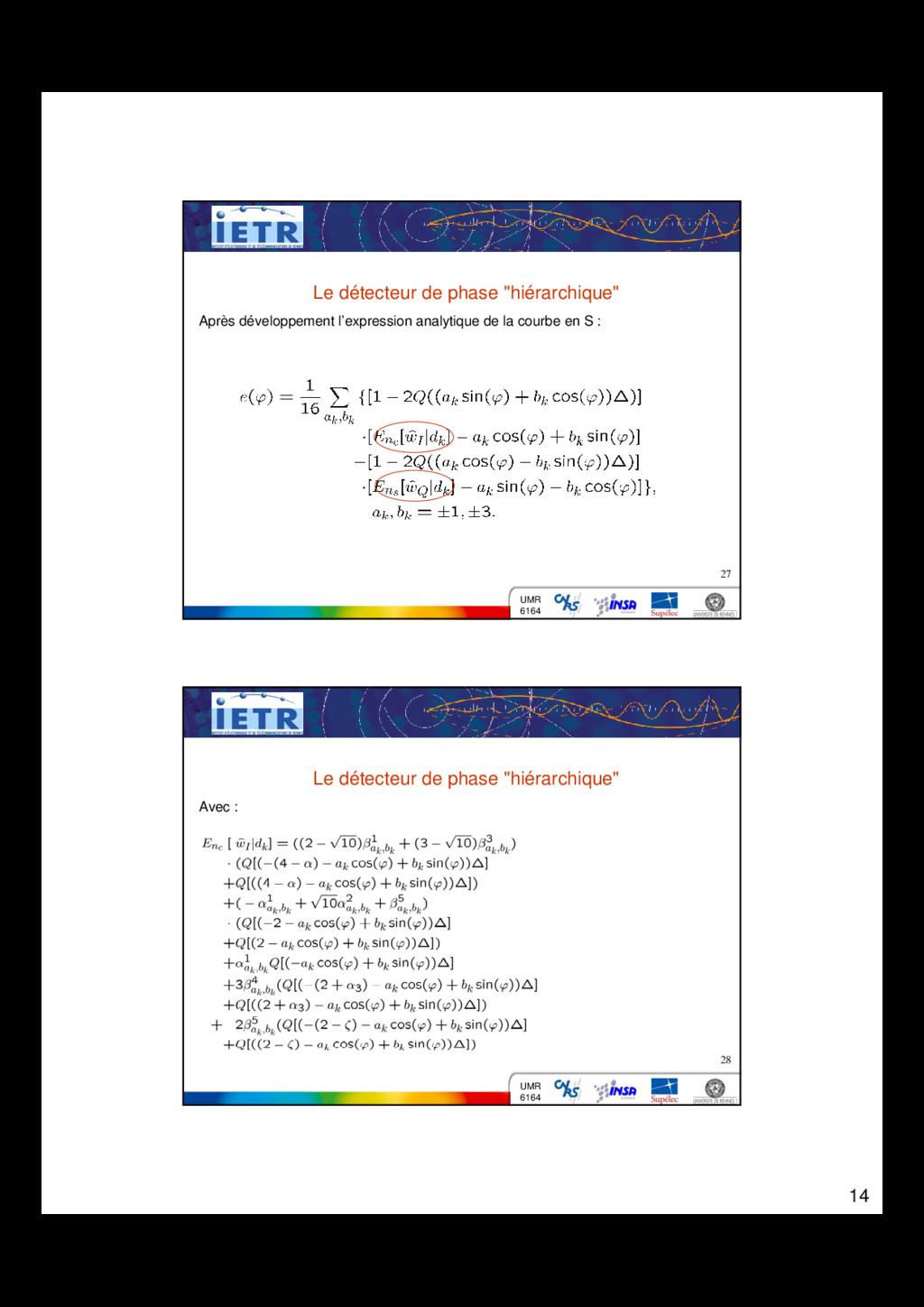
Après développement, la courbe en S du détecteur pour les modulations : 22 UMR 6164 22 Le détecteur de phase classique Le gain du détecteur est la dérivée de la courbe en S à l’origine :
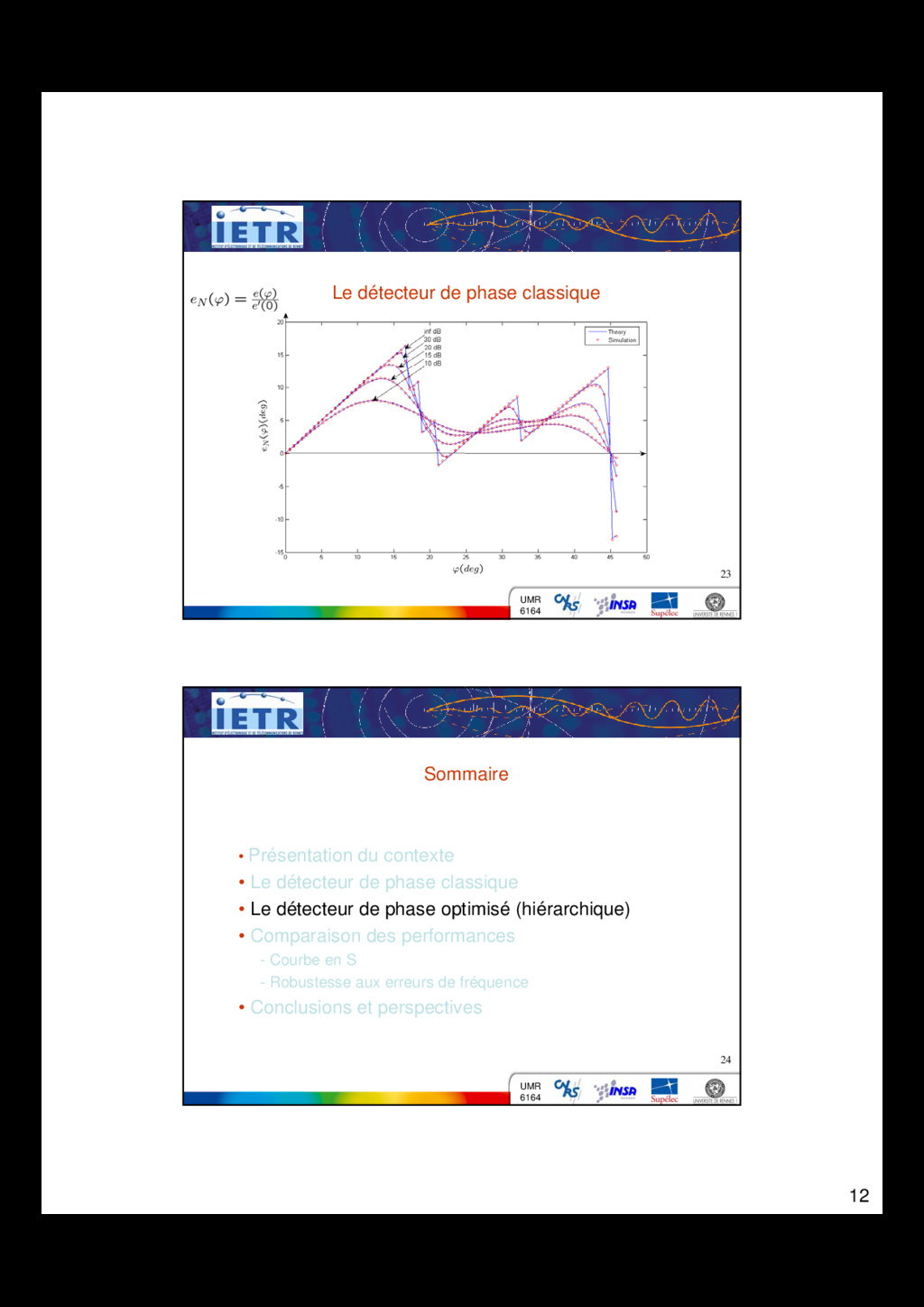
24 UMR 6164 24 Sommaire • Présentation du contexte • Le détecteur de phase classique • Le détecteur de phase optimisé (hiérarchique) • Comparaison des performances - Courbe en S - Robustesse aux erreurs de fréquence • Conclusions et perspectives
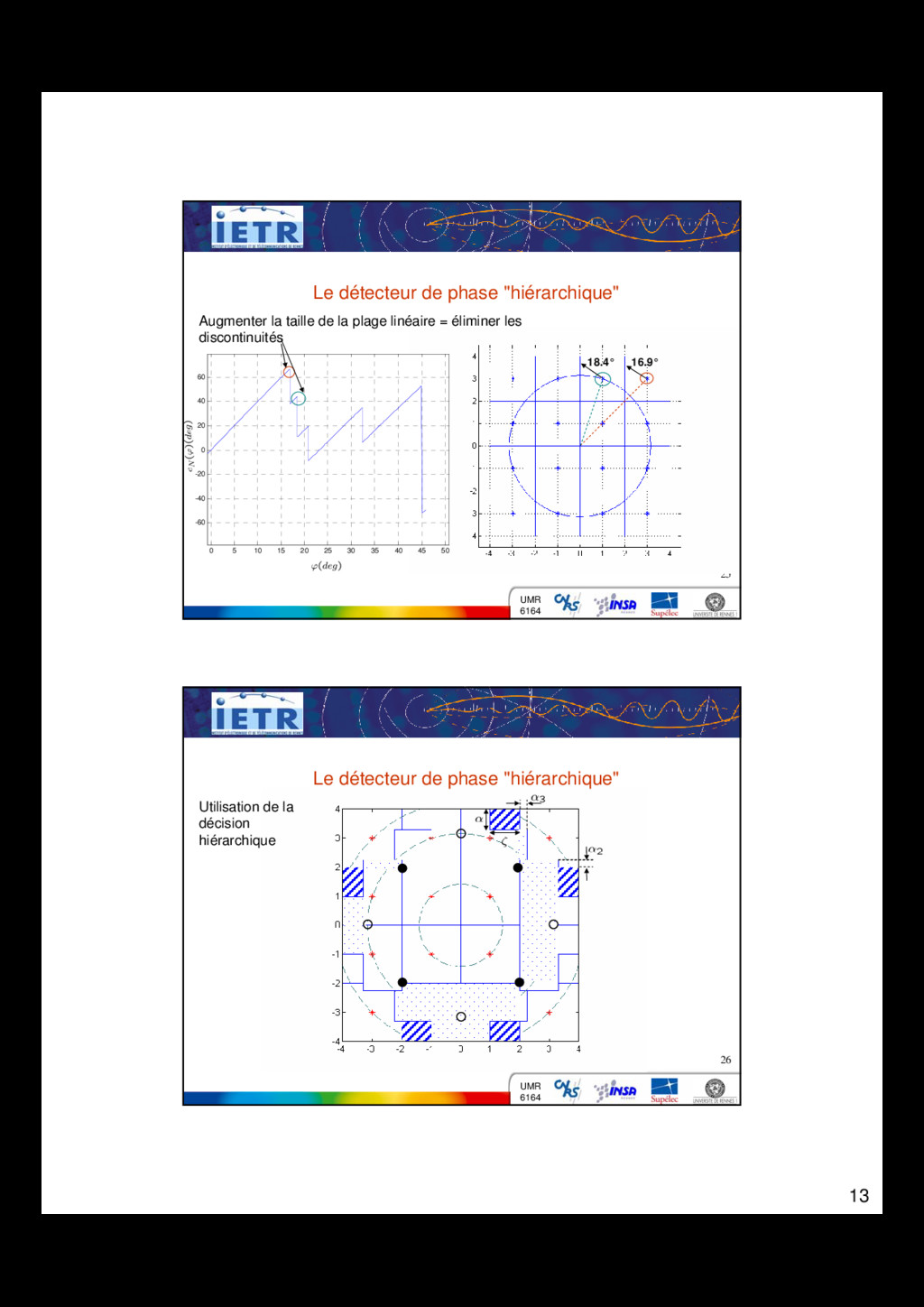
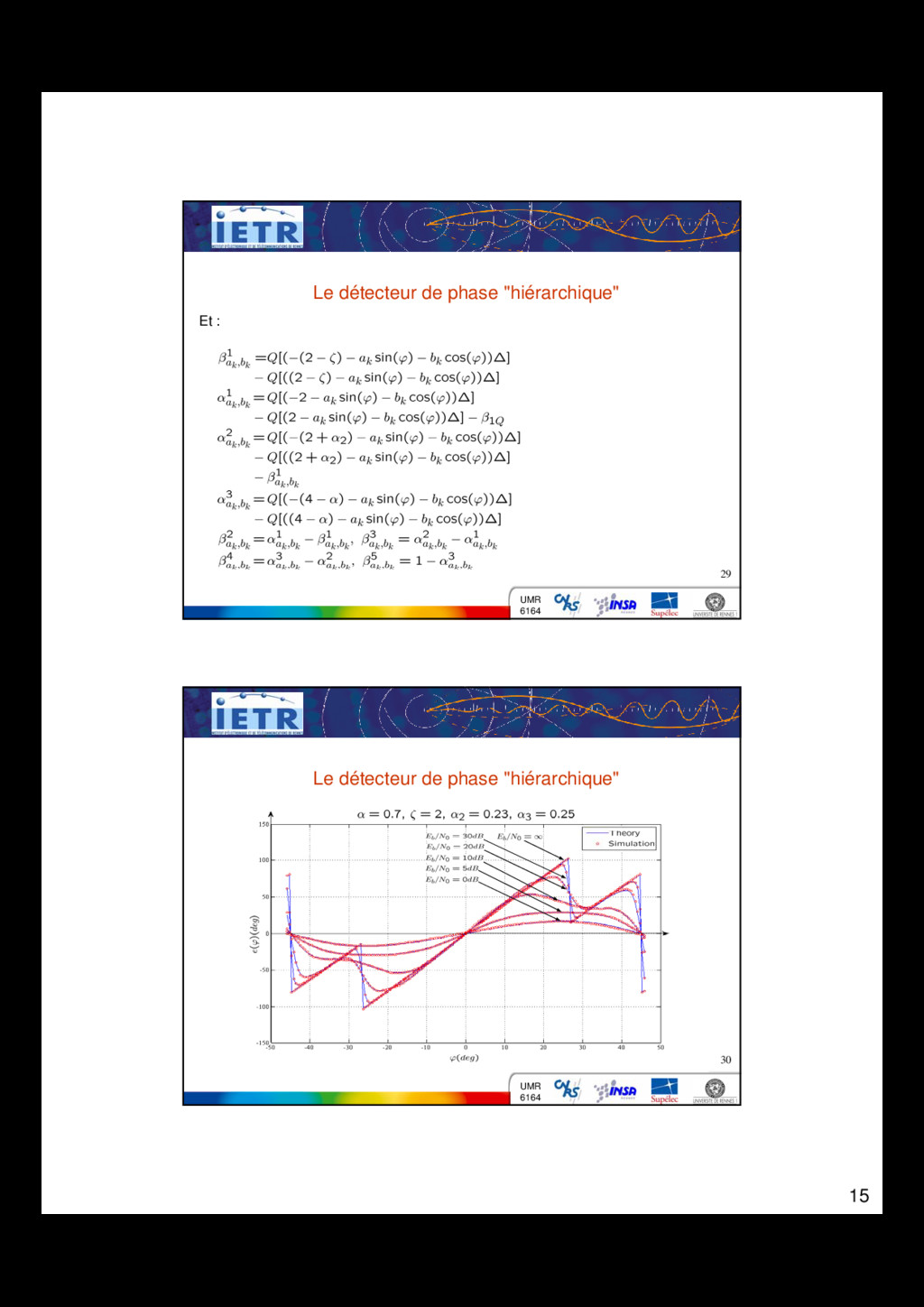
16.9° 18.4° 0 5 10 15 20 25 30 35 40 45 50 -60 -40 -20 0 20 40 60 Augmenter la taille de la plage linéaire = éliminer les discontinuités 26 UMR 6164 26 Le détecteur de phase "hiérarchique" Utilisation de la décision hiérarchique
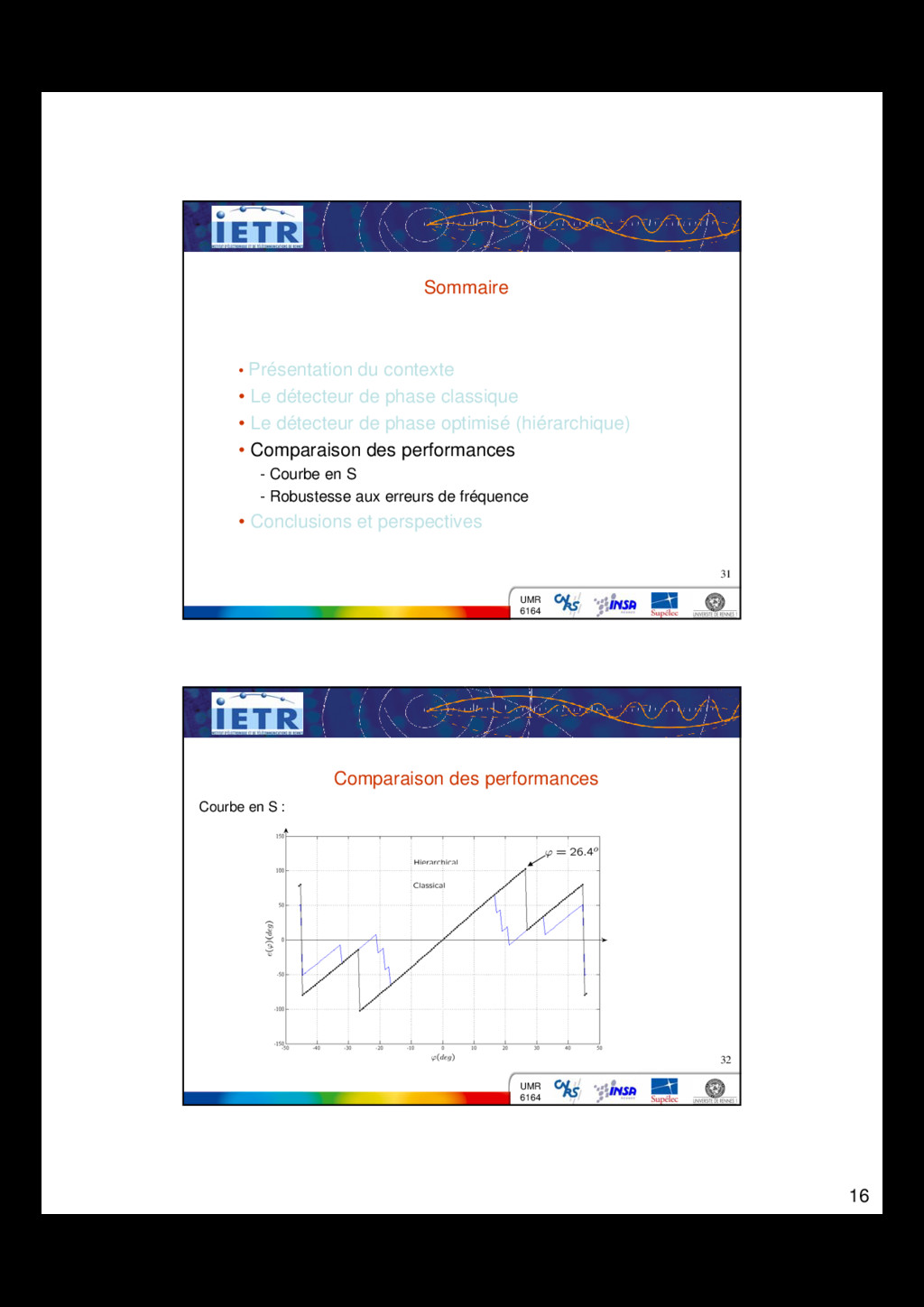
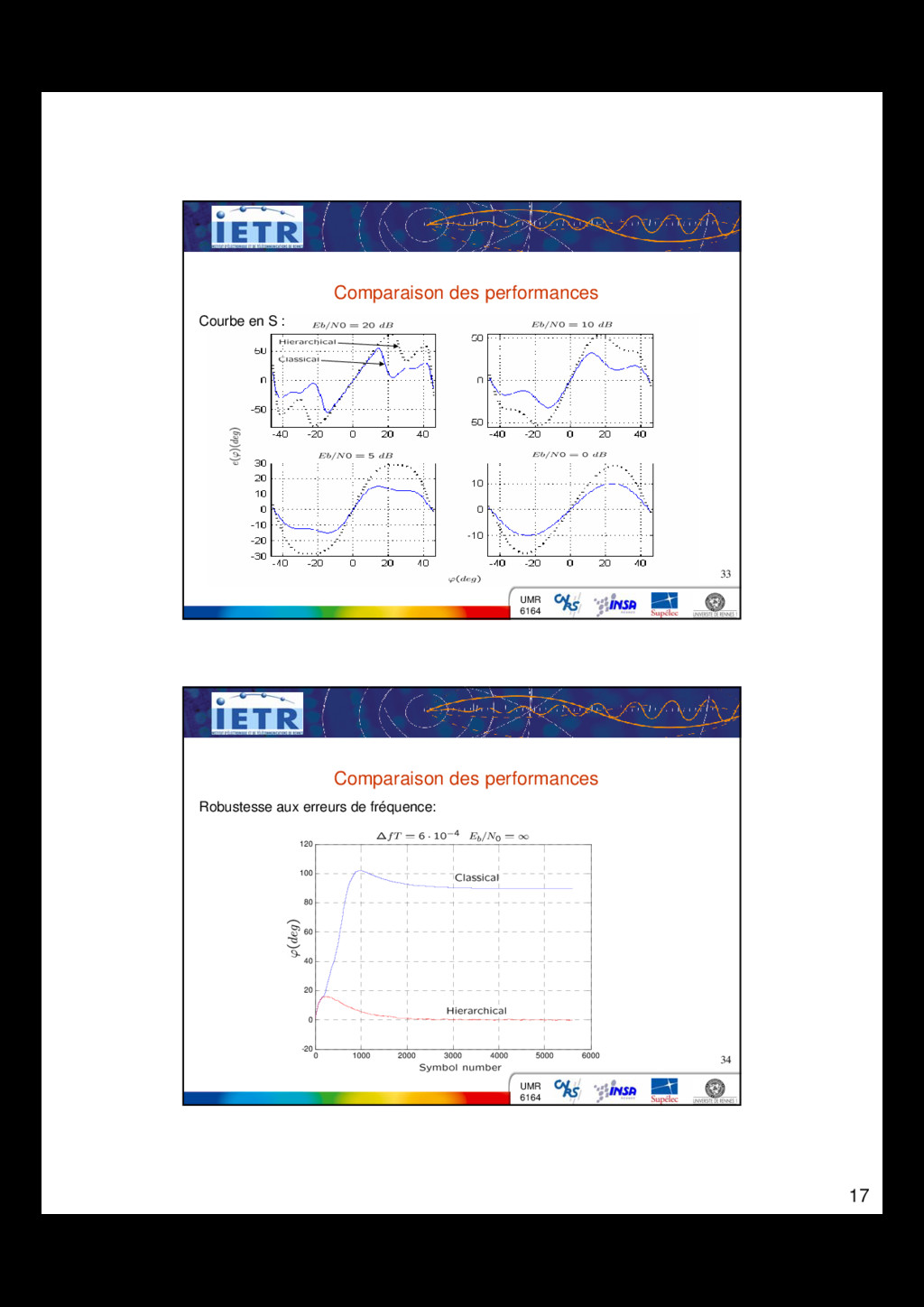
• Le détecteur de phase classique • Le détecteur de phase optimisé (hiérarchique) • Comparaison des performances - Courbe en S - Robustesse aux erreurs de fréquence • Conclusions et perspectives 32 UMR 6164 32 Comparaison des performances Courbe en S :
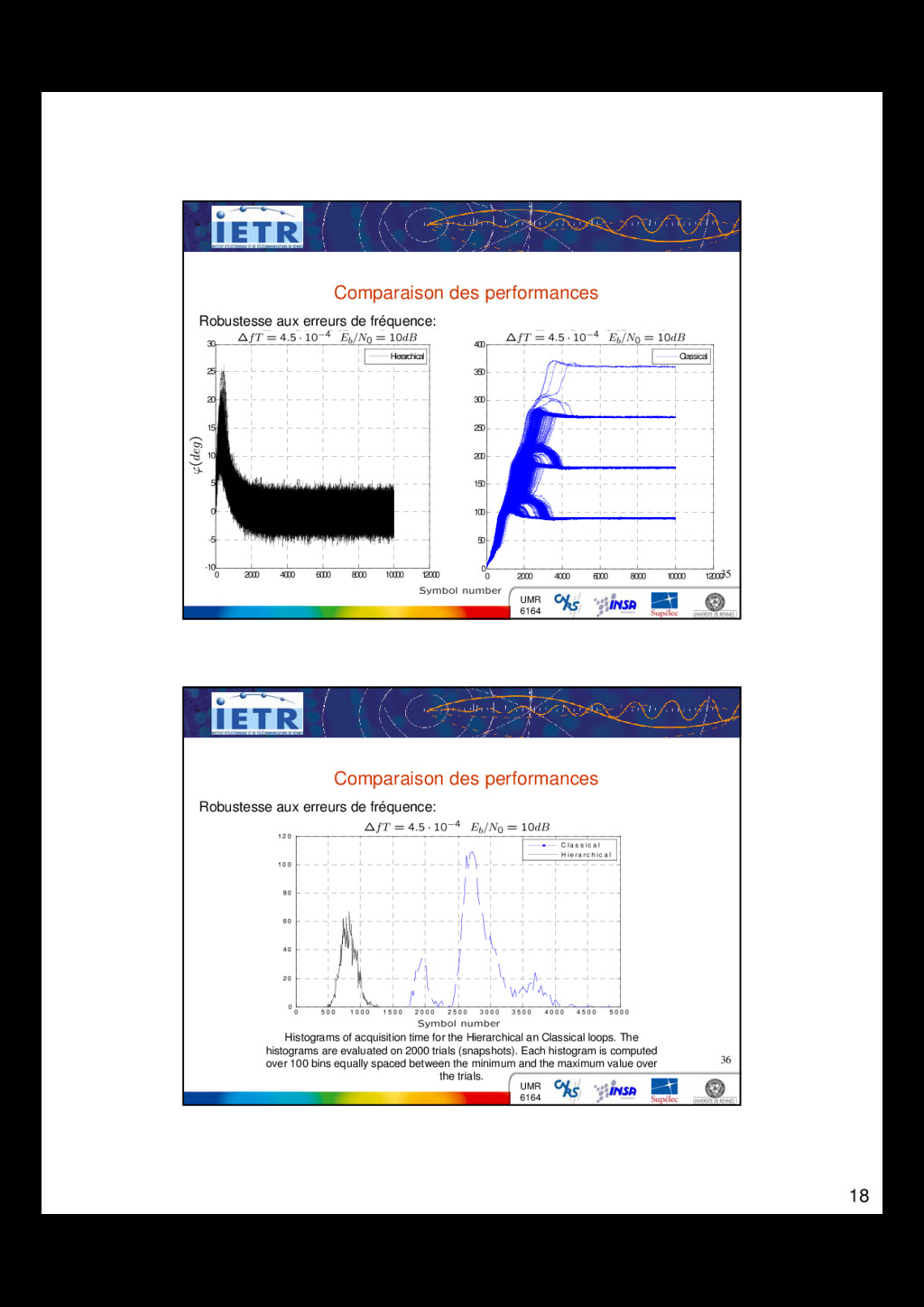
erreurs de fréquence: 0 2000 4000 6000 8000 10000 12000 0 50 100 150 200 250 300 350 400 BT =0.001 Eb/N0 =10dB DfT=0.00044385 Classical 0 2000 4000 6000 8000 10000 12000 -10 -5 0 5 10 15 20 25 30 BT =0.001 Eb/N0 =10dB DfT =0.00044385 H ierarchical 36 UMR 6164 36 0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0 3 5 0 0 4 0 0 0 4 5 0 0 5 0 0 0 0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 B T = 0 . 0 0 1 E b / N 0 = 1 0 d B D fT = 0 . 0 0 0 4 4 3 8 5 C la s s ic a l H ie ra rc h ic a l Comparaison des performances Robustesse aux erreurs de fréquence: Histograms of acquisition time for the Hierarchical an Classical loops. The histograms are evaluated on 2000 trials (snapshots). Each histogram is computed over 100 bins equally spaced between the minimum and the maximum value over the trials.
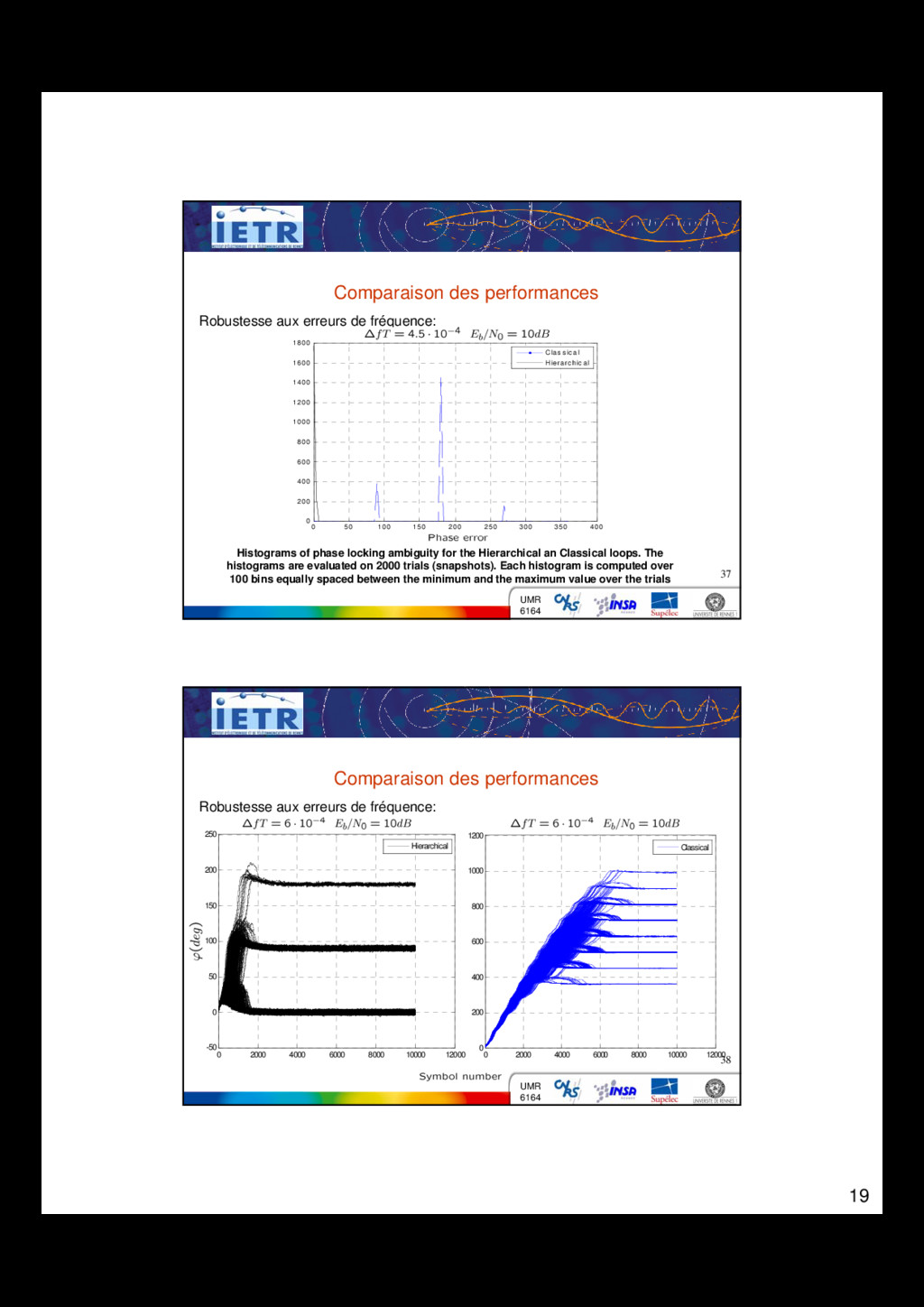
for the Hierarchical an Classical loops. The histograms are evaluated on 2000 trials (snapshots). Each histogram is computed over 100 bins equally spaced between the minimum and the maximum value over the trials 0 50 100 150 200 250 300 350 400 0 200 400 600 800 1000 1200 1400 1600 1800 B T = 0.001 E b/N0 = 10dB DfT= 0.00044385 Clas s ic al Hierarc hic al Comparaison des performances Robustesse aux erreurs de fréquence: 38 UMR 6164 38 0 2000 4000 6000 8000 10000 12000 0 200 400 600 800 1000 1200 BT =0.001 Eb/N0 =10dB DfT=0.00041581 Classical 0 2000 4000 6000 8000 10000 12000 -50 0 50 100 150 200 250 BT =0.001 Eb/N0 =10dB DfT=0.00041581 Hierarchical Comparaison des performances Robustesse aux erreurs de fréquence:
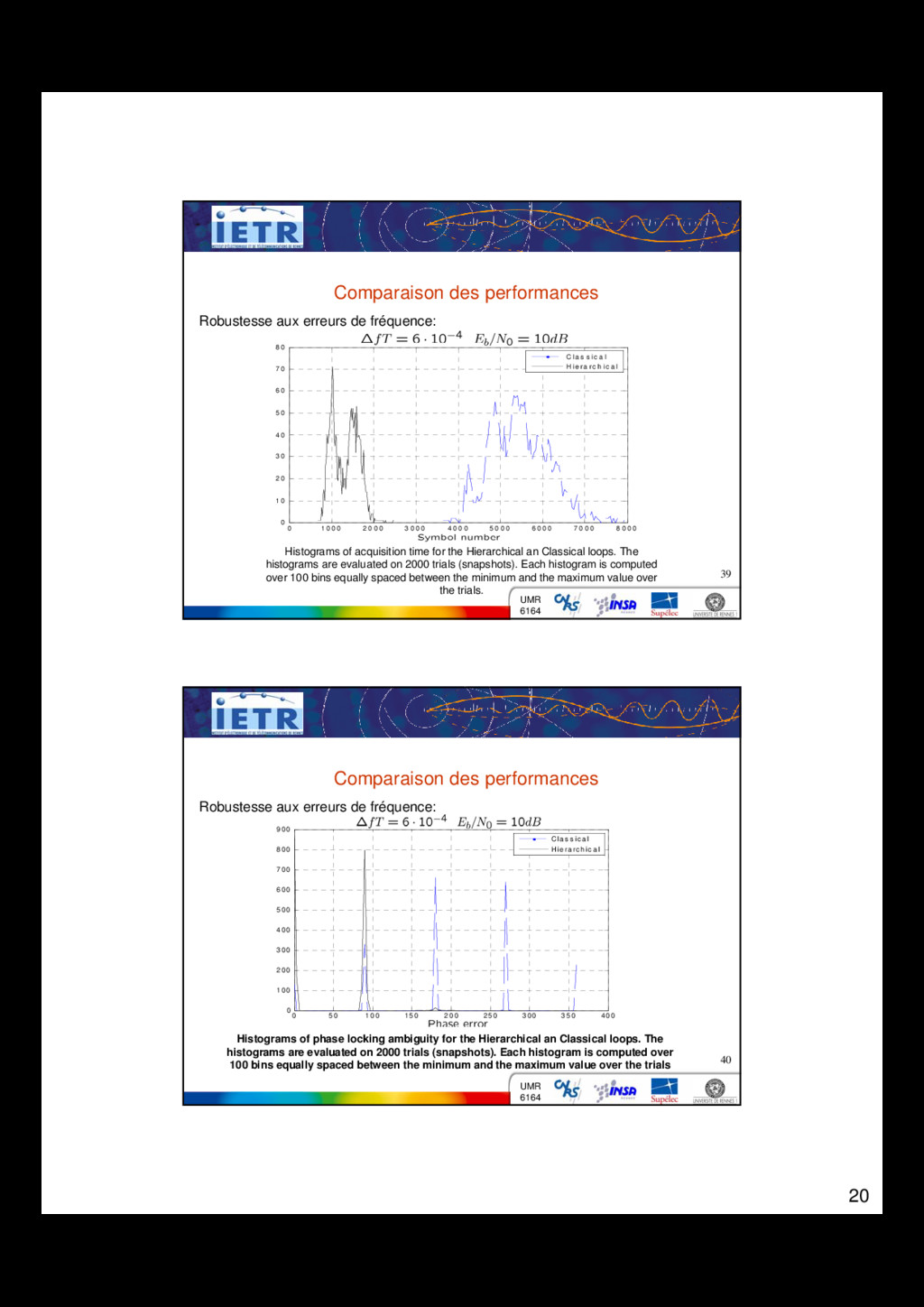
2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0 7 0 0 0 8 0 0 0 0 1 0 2 0 3 0 4 0 5 0 6 0 7 0 8 0 B T = 0 . 0 0 1 E b / N 0 = 1 0 d B D fT = 0 . 0 0 0 4 1 5 8 1 C la s s ic a l H ie ra rc h ic a l Comparaison des performances Robustesse aux erreurs de fréquence: Histograms of acquisition time for the Hierarchical an Classical loops. The histograms are evaluated on 2000 trials (snapshots). Each histogram is computed over 100 bins equally spaced between the minimum and the maximum value over the trials. 40 UMR 6164 40 0 5 0 1 0 0 1 5 0 2 0 0 2 5 0 3 0 0 3 5 0 4 0 0 0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0 7 0 0 8 0 0 9 0 0 B T = 0 .0 0 1 E b /N 0 = 1 0 d B D fT= 0 .0 0 0 4 1 5 8 1 C la s s ic a l H ie ra rc h ic a l Histograms of phase locking ambiguity for the Hierarchical an Classical loops. The histograms are evaluated on 2000 trials (snapshots). Each histogram is computed over 100 bins equally spaced between the minimum and the maximum value over the trials Comparaison des performances Robustesse aux erreurs de fréquence:
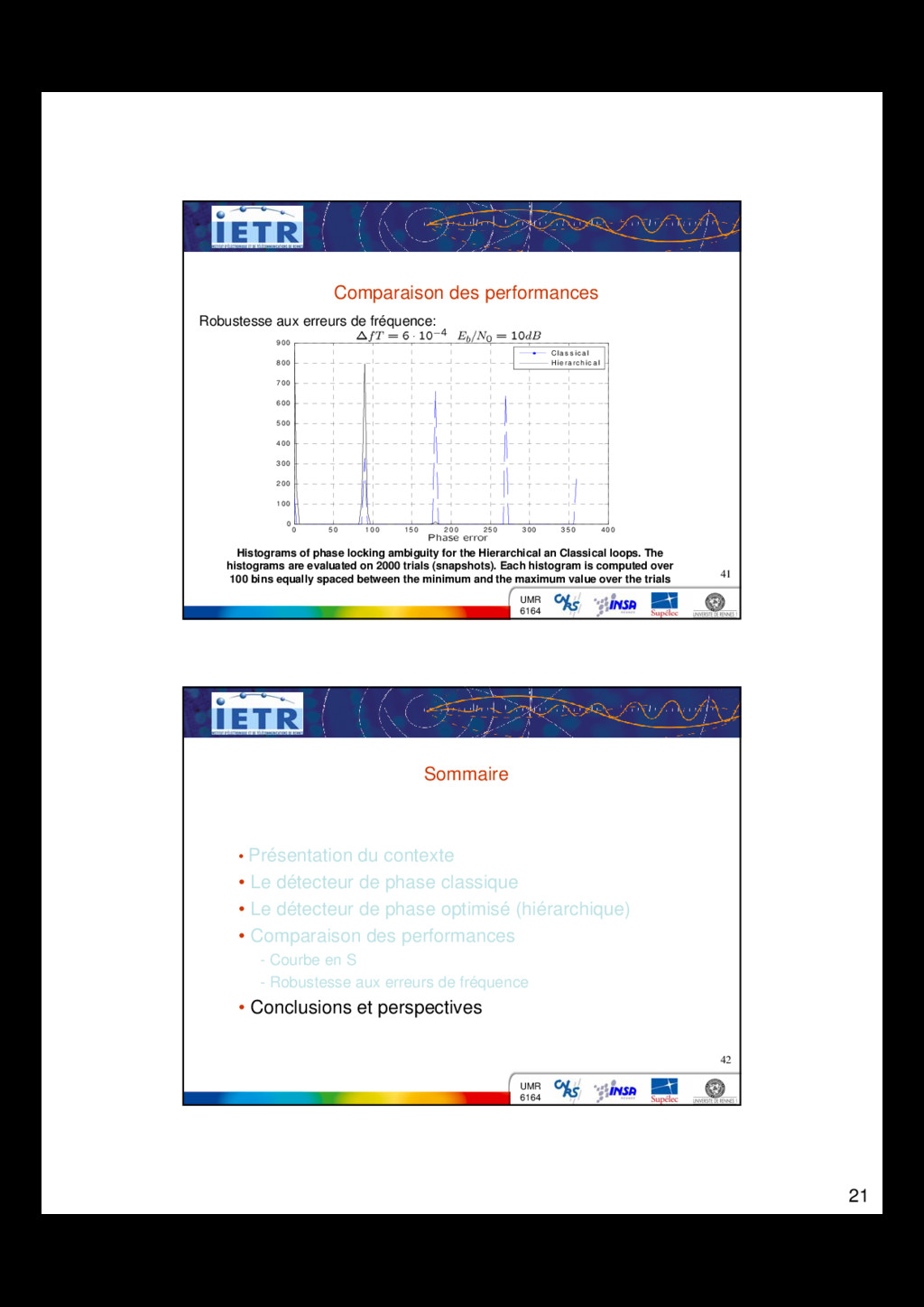
0 1 5 0 2 0 0 2 5 0 3 0 0 3 5 0 4 0 0 0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0 7 0 0 8 0 0 9 0 0 B T = 0 .0 0 1 E b /N 0 = 1 0 d B D fT= 0 .0 0 0 4 1 5 8 1 C la s s ic a l H ie ra rc h ic a l Histograms of phase locking ambiguity for the Hierarchical an Classical loops. The histograms are evaluated on 2000 trials (snapshots). Each histogram is computed over 100 bins equally spaced between the minimum and the maximum value over the trials Comparaison des performances Robustesse aux erreurs de fréquence: 42 UMR 6164 42 Sommaire • Présentation du contexte • Le détecteur de phase classique • Le détecteur de phase optimisé (hiérarchique) • Comparaison des performances - Courbe en S - Robustesse aux erreurs de fréquence • Conclusions et perspectives
de décision hiérarchique a permis d’améliorer les performances en mode d’acquisition du système de synchronisation de phase DDMLFB pour les constellations 16-QAM • Temps d’acquisition meilleur par rapport à l’approche classique et un accrochage sans ambiguïté de phase. • Robustesse du système optimisé aux erreurs de fréquence. • Analyse théorique à la fois de la courbe en S du détecteur de phase classique et hiérarchique pour les modulations QAM. • Etude des performances en mode de poursuite (variance et sauts de cycles) (en cours). • Nouvelles approches pour la synchronisation de phase dans un contexte Radio-logicielle.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}