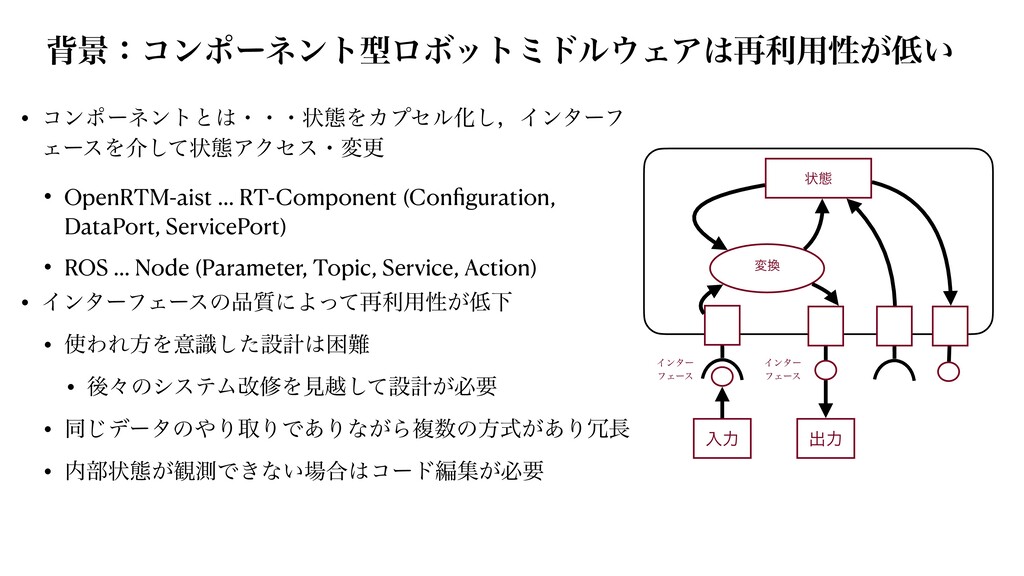
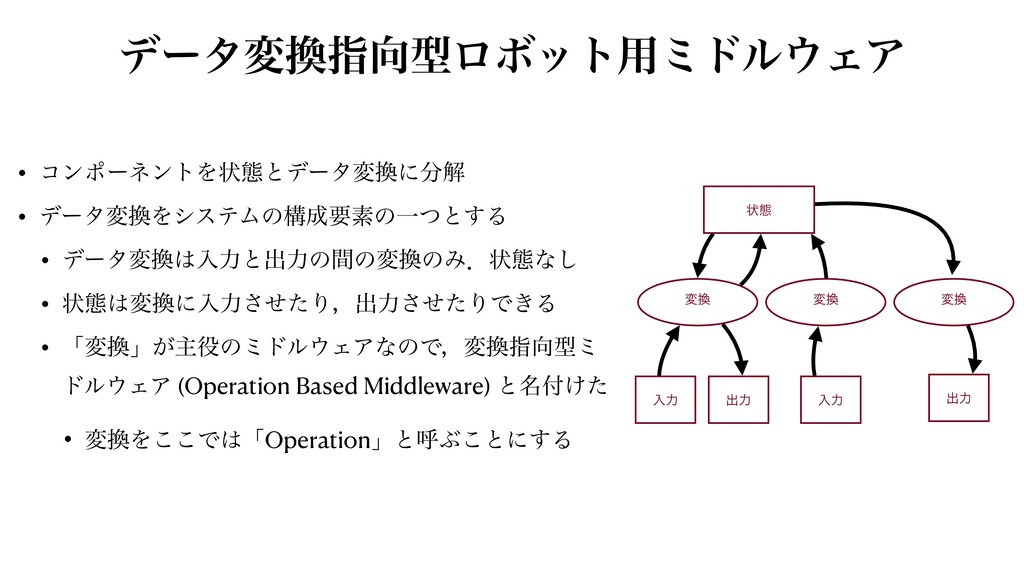
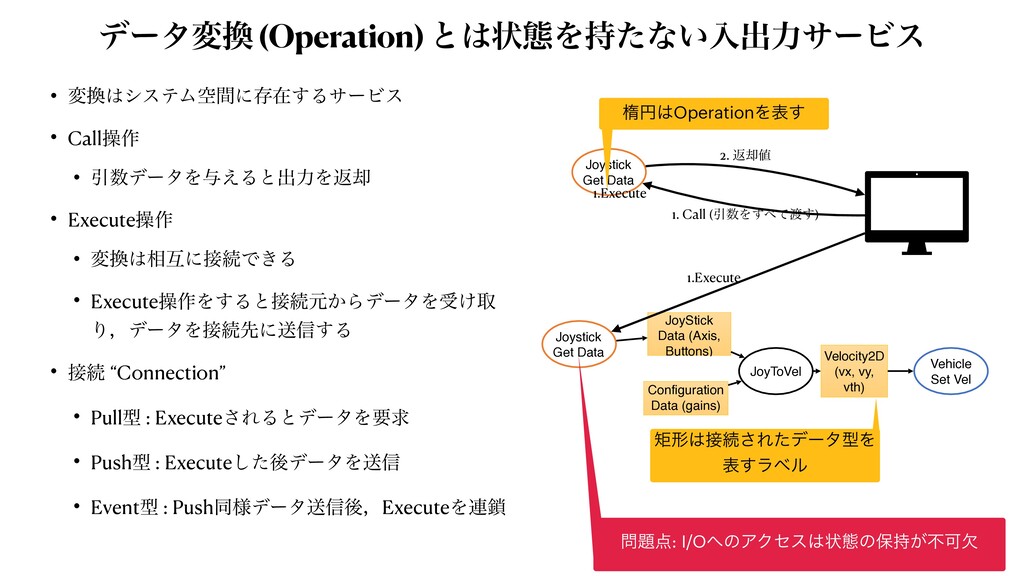
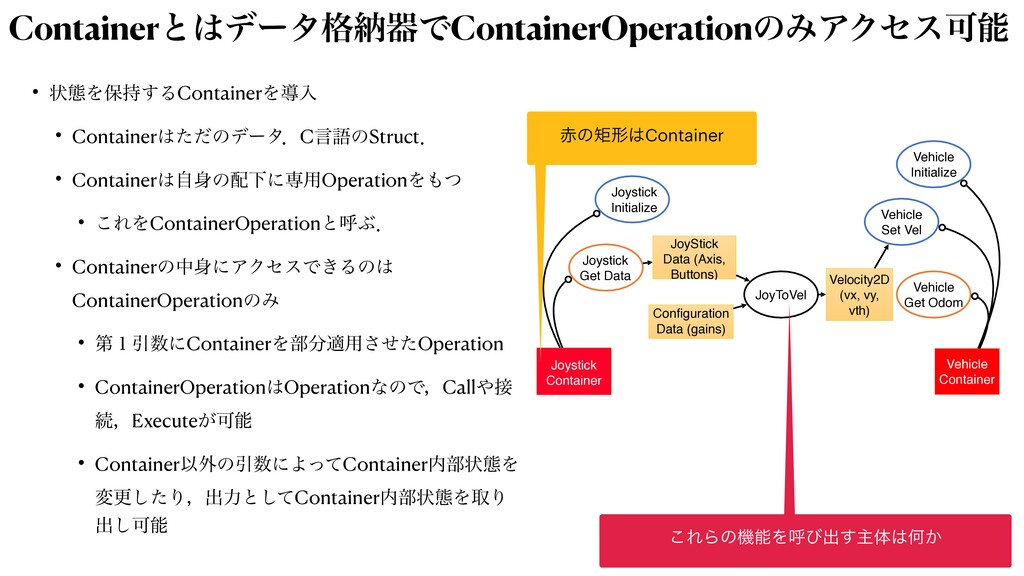
コンポーネント指向ミドルウェアはモジュール設計が困難な結果として再利用性が低いと考え,より小さなモジュールとして,データの入出力変換に着目したロボット等の実体システム用ミドルウェアを開発しています.
デモ動画 https://youtu.be/uJBAAEBUtt8
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}