Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
論文紹介: Multi-task DAG Learning for Multi-modal Data
Search
Naoki Chihara
May 29, 2025
Research
6
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
論文紹介: Multi-task DAG Learning for Multi-modal Data
研究室の勉強会に使用した資料
Naoki Chihara
May 29, 2025
More Decks by Naoki Chihara
See All by Naoki Chihara
Modeling Covariate Transition for Efficient Estimation of Longitudinal Treatment Effects in Randomized Experiments
naoki13
0
29
論文紹介: Dynamic Hyperparameter Optimization for Real-Time Data Streams
naoki13
0
9
Modeling Time-evolving Causality over Data Streams
naoki13
0
73
時間変化する因果関係の抽出に基づいた高速将来予測
naoki13
0
45
動的モード分解を活用した高速将来予測アルゴリズム
naoki13
0
28
論文紹介: A Robust Seasonal-Trend Decomposition Algorithm for Long Time Series
naoki13
0
8
周期解析による変動天体検出
naoki13
0
17
Other Decks in Research
See All in Research
Spatial Active Noise Control Based on Sound Field Interpolation Incorporating Physical Constraints
skoyamalab
0
120
研究室単位での自律的 IPv6接続性確立に向けたAS共同運用モデルの提案と実証
reokashiwa
PRO
0
150
GLIM とMegaParticles:正規分布近似の限界とタイトカップリング&パーティクルフィルタの進展 / GLIM and MegaParticles : Progress of the distribution representation in SLAM
koide3
0
590
PGDM: Physically Guided Diffusion Model for L Downscaling
satai
3
350
AIエージェント時代のLLM-jpモデルのあるべき姿
k141303
0
510
多様なデータを許容し学習し続ける模倣学習 / Advanced Imitation Learning for VLA
prinlab
0
240
人間中心の意思決定支援AI
yukinobaba
PRO
7
3.4k
AIを叩き台として、 「検証」から「共創」へと進化するリサーチ
mela_dayo
0
310
SOTAのさらに先へ:厳しい推論制約下での高性能モデルのPost-Training
analokmaus
0
1.4k
Dual Quadric表現を用いた動的物体追跡とRGB-D・IMU制約の密結合によるオドメトリ推定
nanoshimarobot
0
440
オーストリア流 都市の公共交通サービス水準評価@公共交通オープンデータ最前線2026
trafficbrain
0
200
Cross-Media Human-Information Interaction
signer
PRO
0
120
Featured
See All Featured
The SEO identity crisis: Don't let AI make you average
varn
0
510
SEO Brein meetup: CTRL+C is not how to scale international SEO
lindahogenes
1
2.8k
Prompt Engineering for Job Search
mfonobong
0
380
Accessibility Awareness
sabderemane
1
150
Cheating the UX When There Is Nothing More to Optimize - PixelPioneers
stephaniewalter
287
14k
Save Time (by Creating Custom Rails Generators)
garrettdimon
PRO
32
3.8k
Winning Ecommerce Organic Search in an AI Era - #searchnstuff2025
aleyda
1
2.1k
How to Build an AI Search Optimization Roadmap - Criteria and Steps to Take #SEOIRL
aleyda
1
2.1k
The Power of CSS Pseudo Elements
geoffreycrofte
82
6.4k
Balancing Empowerment & Direction
lara
6
1.2k
Distributed Sagas: A Protocol for Coordinating Microservices
caitiem20
333
23k
sira's awesome portfolio website redesign presentation
elsirapls
0
300
Transcript
MM-DAG: Multi-task DAG Learning for Multi-modal Data - with Application
for Traffic Congestion Analysis 2025.05.29 ⼤阪⼤学 産業科学研究所 千原 直⼰
紹介する論⽂ 2025.05.29 © 2025 Naoki Chihara et al. 2 •
KDD 2023 に採択された論⽂
Summary 複雑なシステムから得られる multi-modal なデータから 因果関係を学習するための multi-task learning • スカラー /
ベクトル / 関数という複数種類のデータ間の線形な因果 関係を表現可能である • 重複していないノードが含まれていてもDAGの違いを評価可能な新 たなスコア関数を提供 • 提案⼿法を交通データに対して適⽤して、交通の意思決定に関する 価値ある知⾒を取得 2025.05.29 © 2025 Naoki Chihara et al. 3
Challenges in this work 本研究における課題は以下の3つ Ø Multi-modal • スカラー /
ベクトル / 関数 Ø Multi-task • 因果なら multi-context と呼称されている⽅が多いがする • 信号のある交差点 vs ない交差点 • 静的だが異なるデータの特性は異なる因果関係を持つという考え Ø Overlapping and Distinct variables • タスク毎にノードが統⼀されていない • 信号機の点滅周期 2025.05.29 © 2025 Naoki Chihara et al. 4
Challenges in this work 本研究における課題は以下の3つ Ø Multi-modal • スカラー /
ベクトル / 関数 Ø Multi-task • 因果なら multi-context と呼称されている⽅が多いがする • 信号のある交差点 vs ない交差点 • 静的だが異なるデータの特性は異なる因果関係を持つという考え Ø Overlapping and Distinct variables • タスク毎にノードが統⼀されていない • 信号機の点滅周期 2025.05.29 © 2025 Naoki Chihara et al. 5 例:1⽇の⾞の速度曲線 𝑣 𝑡 ※ 実際に得られるデータは有限次元 ※ 関数データとして扱いたいかどうか ※ 特徴:なめらか,稠密
本研究における課題は以下の3つ Ø Multi-modal • スカラー / ベクトル / 関数 Ø
Multi-task • 因果なら multi-context と呼称されている⽅が多いがする • 信号のある交差点 vs ない交差点 • 静的だが異なるデータの特性は異なる因果関係を持つという考え Ø Overlapping and Distinct variables • タスク毎にノードが統⼀されていない • 信号機の点滅周期 Challenges in this work 2025.05.29 © 2025 Naoki Chihara et al. 6
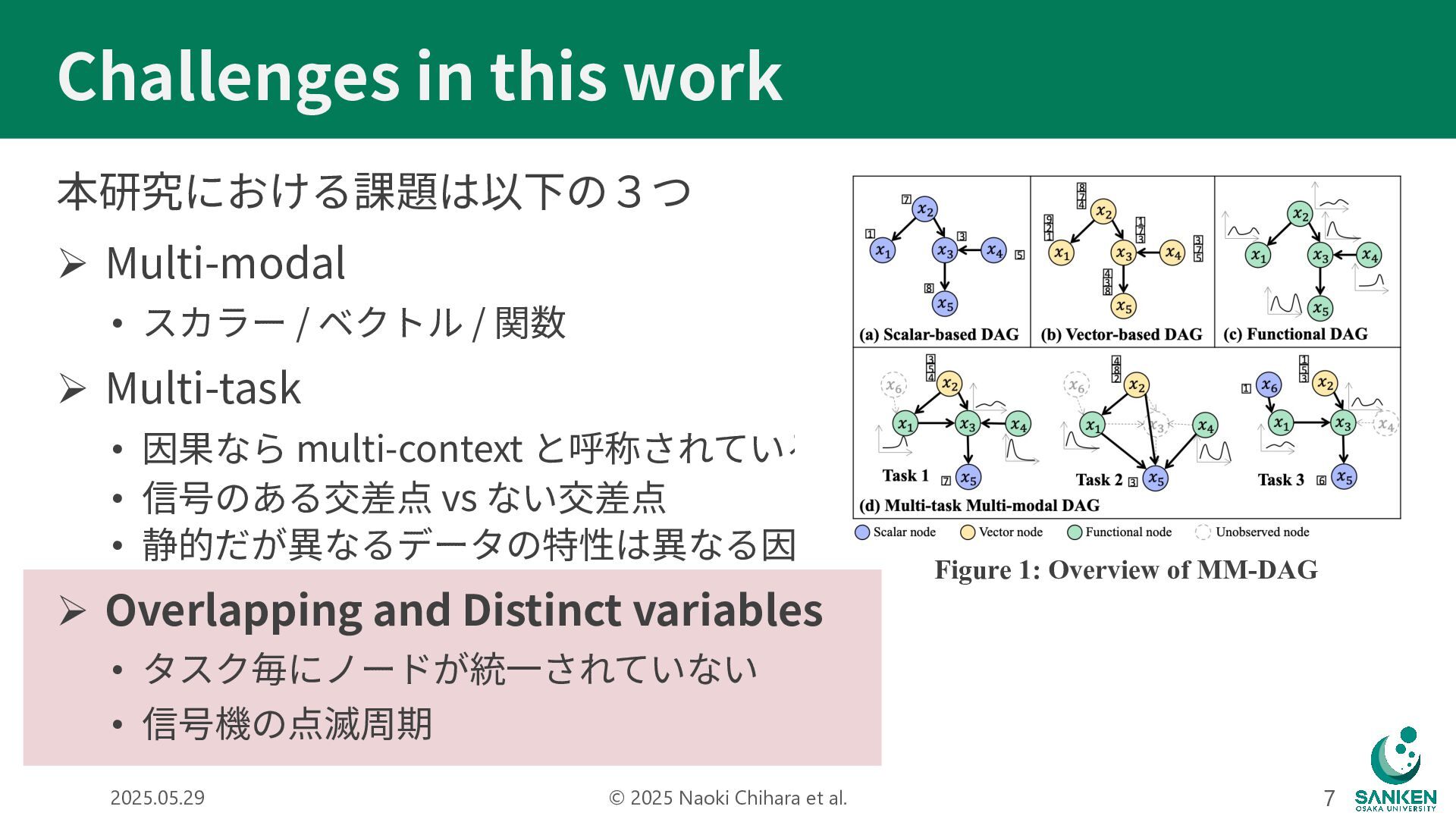
Challenges in this work 本研究における課題は以下の3つ Ø Multi-modal • スカラー /
ベクトル / 関数 Ø Multi-task • 因果なら multi-context と呼称されている⽅が多いがする • 信号のある交差点 vs ない交差点 • 静的だが異なるデータの特性は異なる因果関係を持つという考え Ø Overlapping and Distinct variables • タスク毎にノードが統⼀されていない • 信号機の点滅周期 2025.05.29 © 2025 Naoki Chihara et al. 7 Figure 1: Overview of MM-DAG
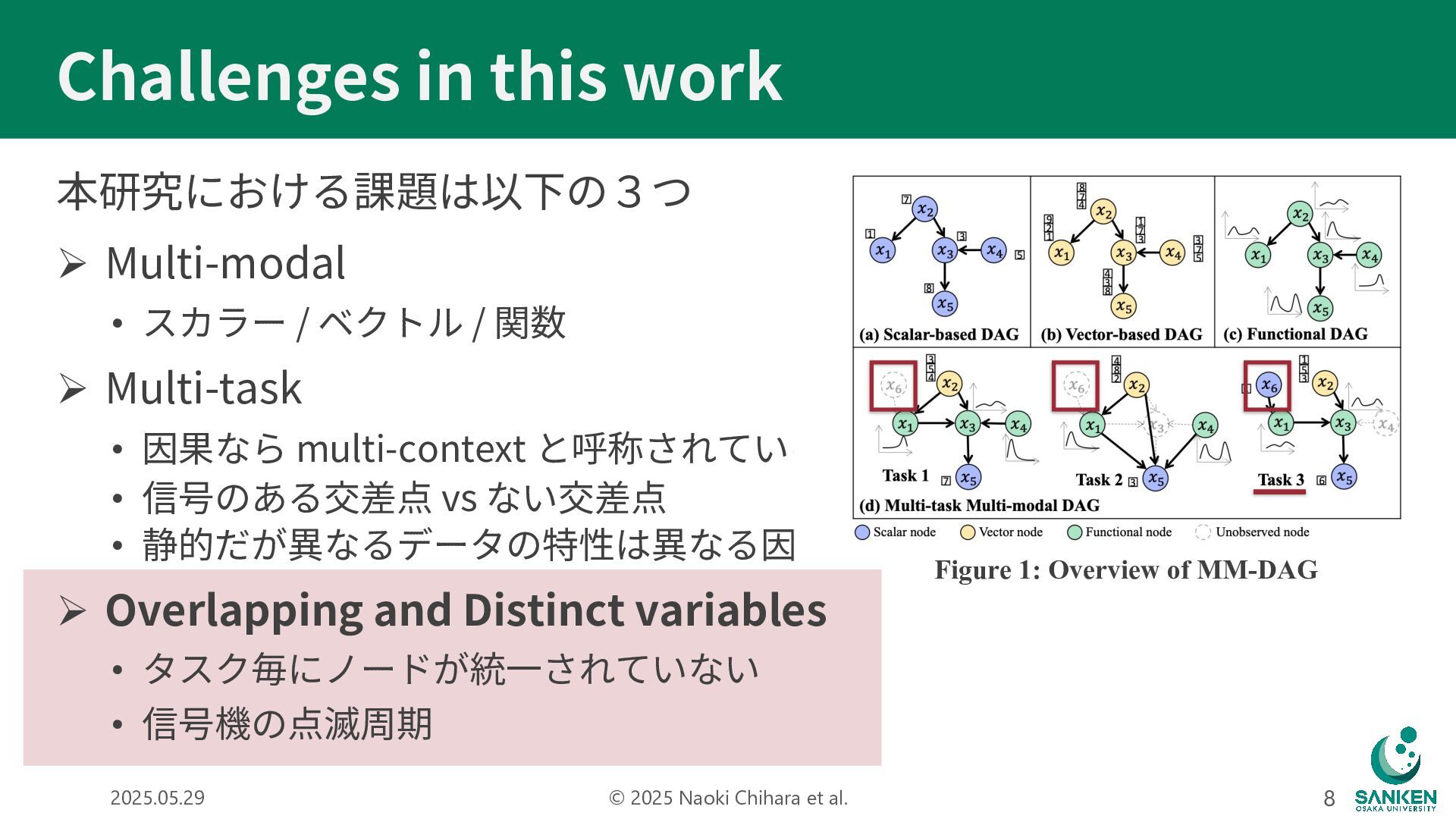
Challenges in this work 本研究における課題は以下の3つ Ø Multi-modal • スカラー /
ベクトル / 関数 Ø Multi-task • 因果なら multi-context と呼称されている⽅が多いがする • 信号のある交差点 vs ない交差点 • 静的だが異なるデータの特性は異なる因果関係を持つという考え Ø Overlapping and Distinct variables • タスク毎にノードが統⼀されていない • 信号機の点滅周期 2025.05.29 © 2025 Naoki Chihara et al. 8 Figure 1: Overview of MM-DAG
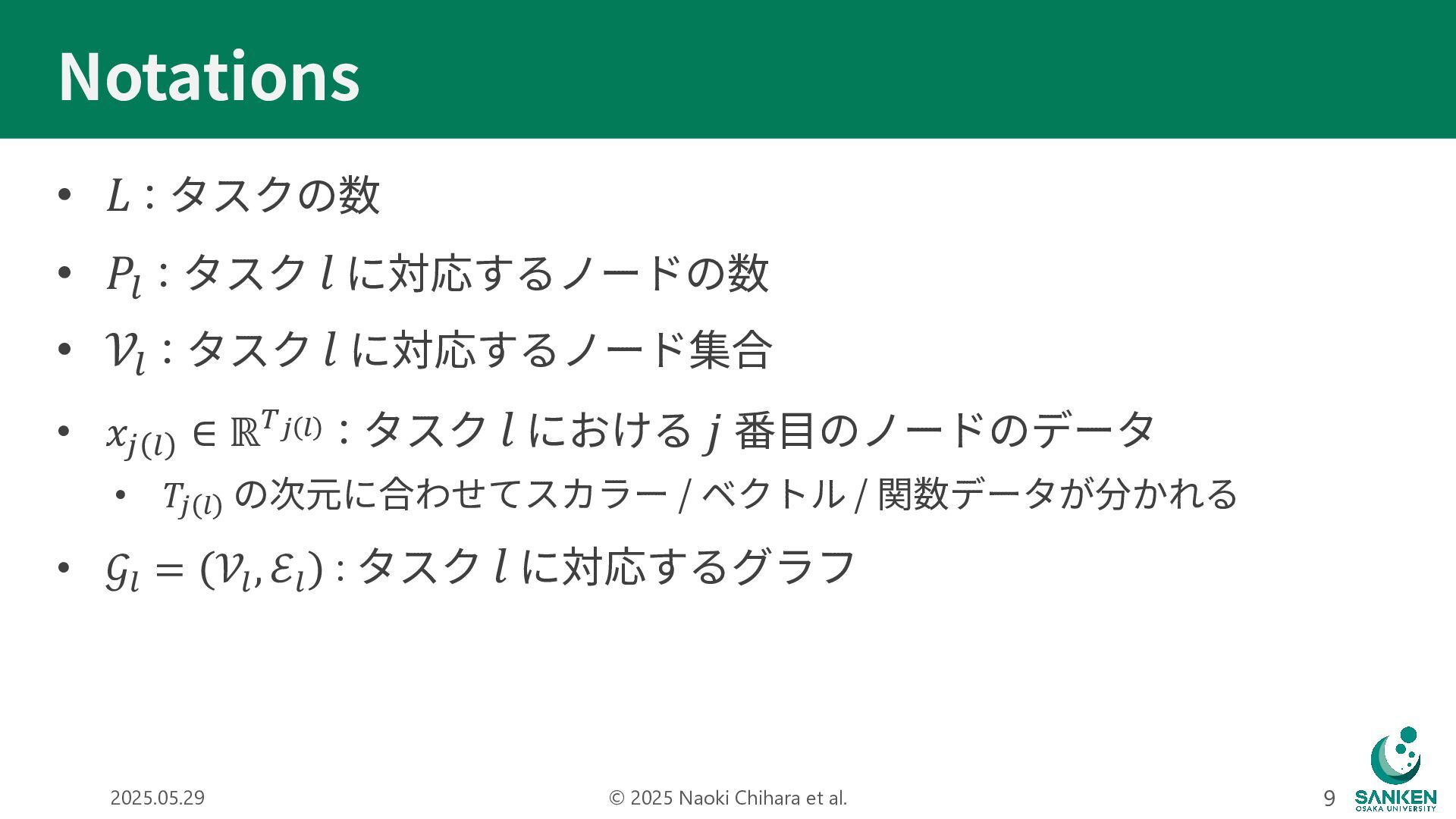
Notations • 𝐿:タスクの数 • 𝑃!:タスク 𝑙 に対応するノードの数 • 𝒱!:タスク 𝑙
に対応するノード集合 • 𝑥# $ ∈ ℝ%! " :タスク 𝑙 における 𝑗 番⽬のノードのデータ • 𝑇! " の次元に合わせてスカラー / ベクトル / 関数データが分かれる • 𝒢$ = 𝒱$ , ℰ$ :タスク 𝑙 に対応するグラフ 2025.05.29 © 2025 Naoki Chihara et al. 9
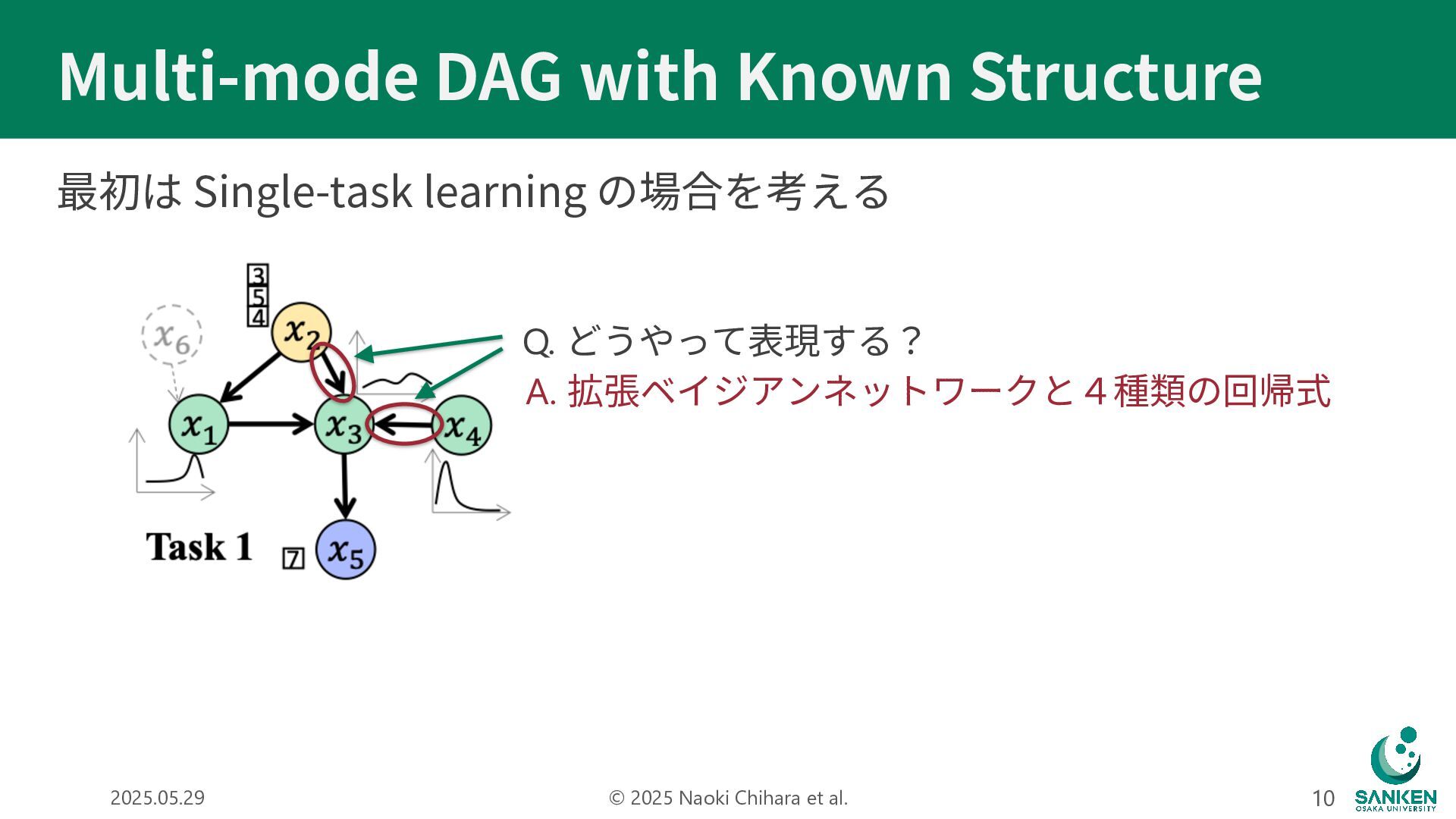
Multi-mode DAG with Known Structure 最初は Single-task learning の場合を考える 2025.05.29
© 2025 Naoki Chihara et al. 10 Q. どうやって表現する? A. 拡張ベイジアンネットワークと4種類の回帰式
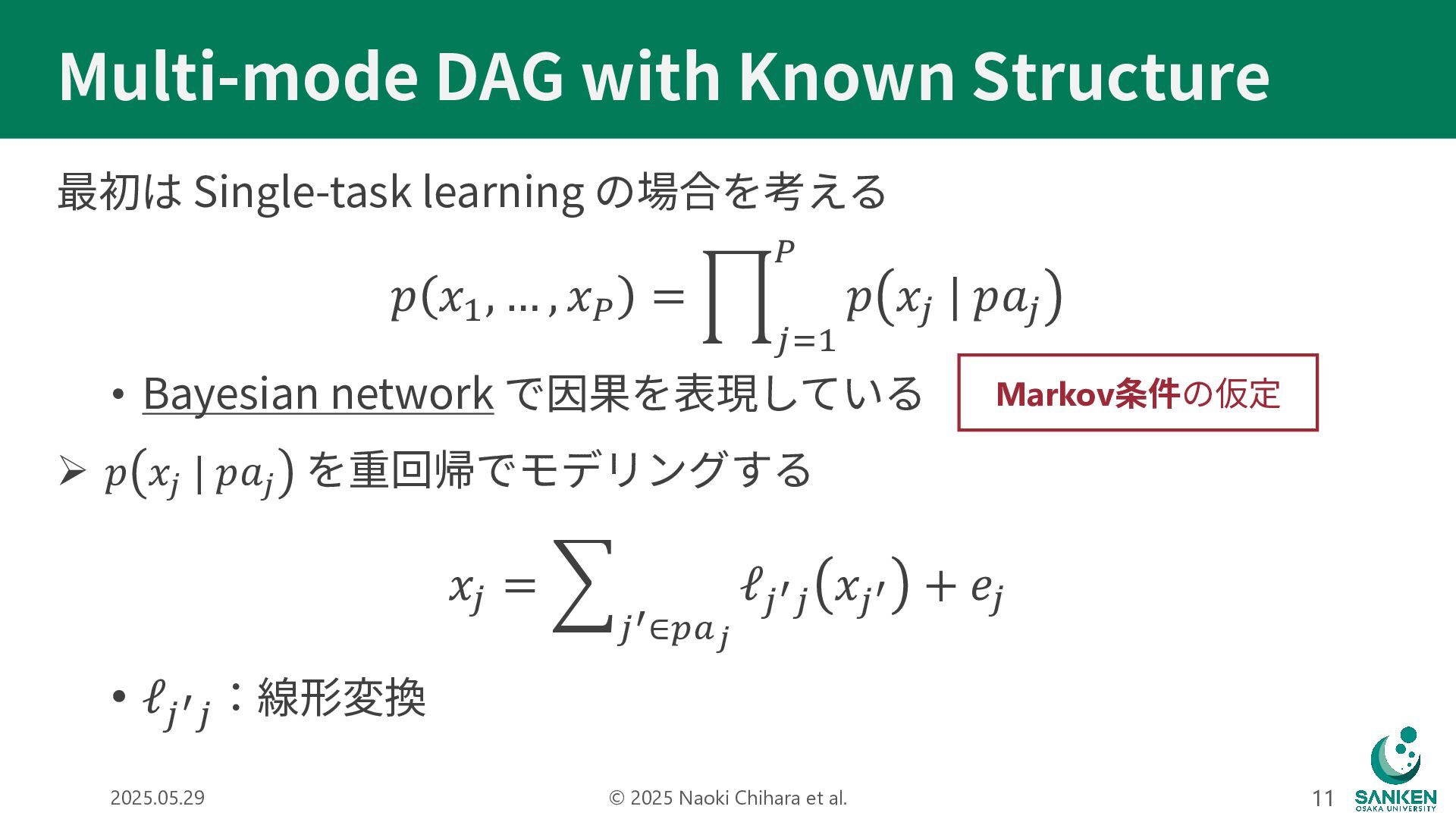
Multi-mode DAG with Known Structure 最初は Single-task learning の場合を考える 𝑝
𝑥" , … , 𝑥# = + $%" # 𝑝 𝑥$ | 𝑝𝑎$ • Bayesian network で因果を表現している Ø 𝑝 𝑥# | 𝑝𝑎# を重回帰でモデリングする 𝑥$ = / $!∈'(" ℓ$!$ 𝑥$! + 𝑒$ • ℓ$!$ :線形変換 2025.05.29 © 2025 Naoki Chihara et al. 11 Markov条件の仮定
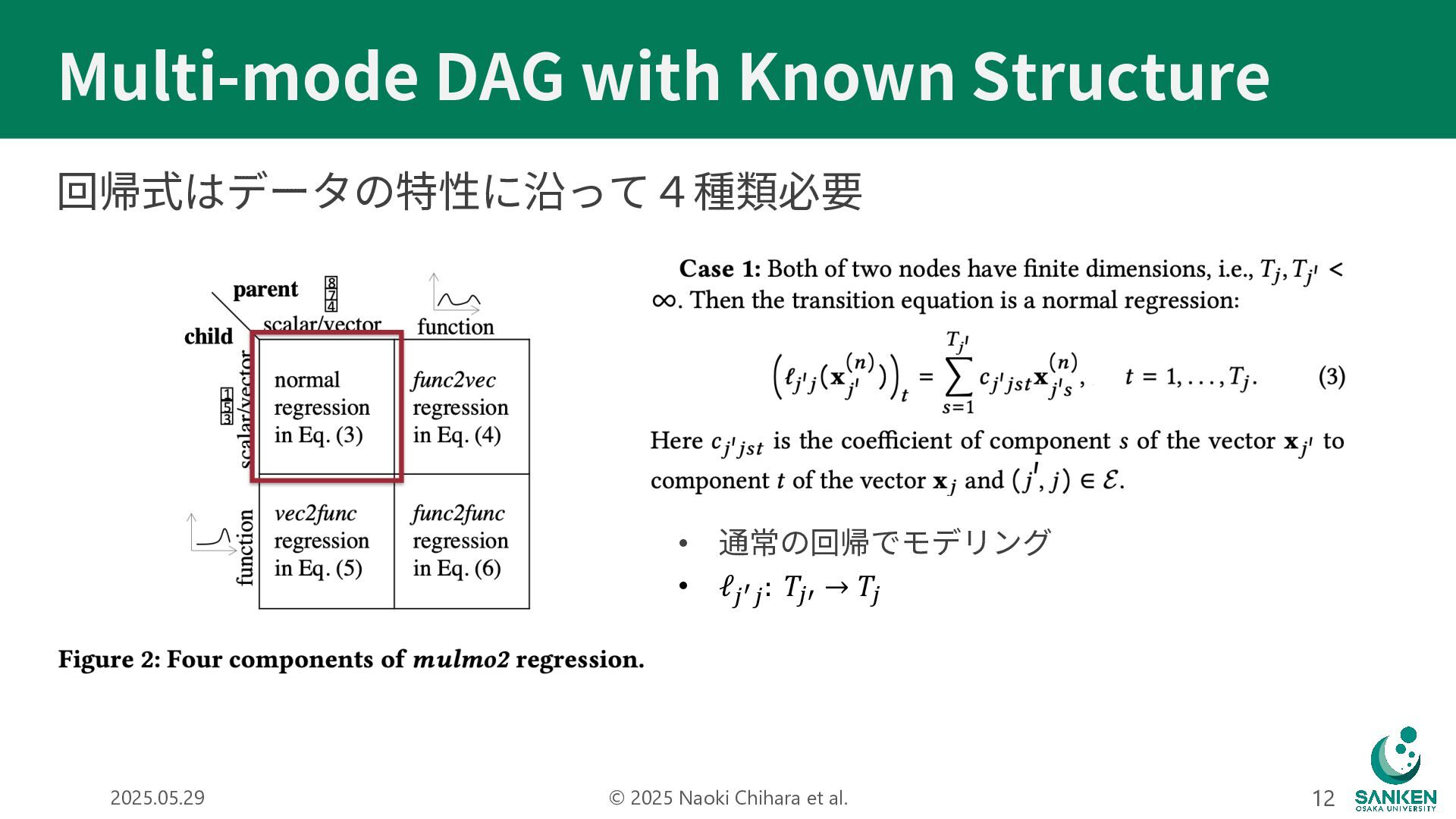
Multi-mode DAG with Known Structure 回帰式はデータの特性に沿って4種類必要 2025.05.29 © 2025 Naoki
Chihara et al. 12 • 通常の回帰でモデリング • ℓ!!! : 𝑇!" → 𝑇!
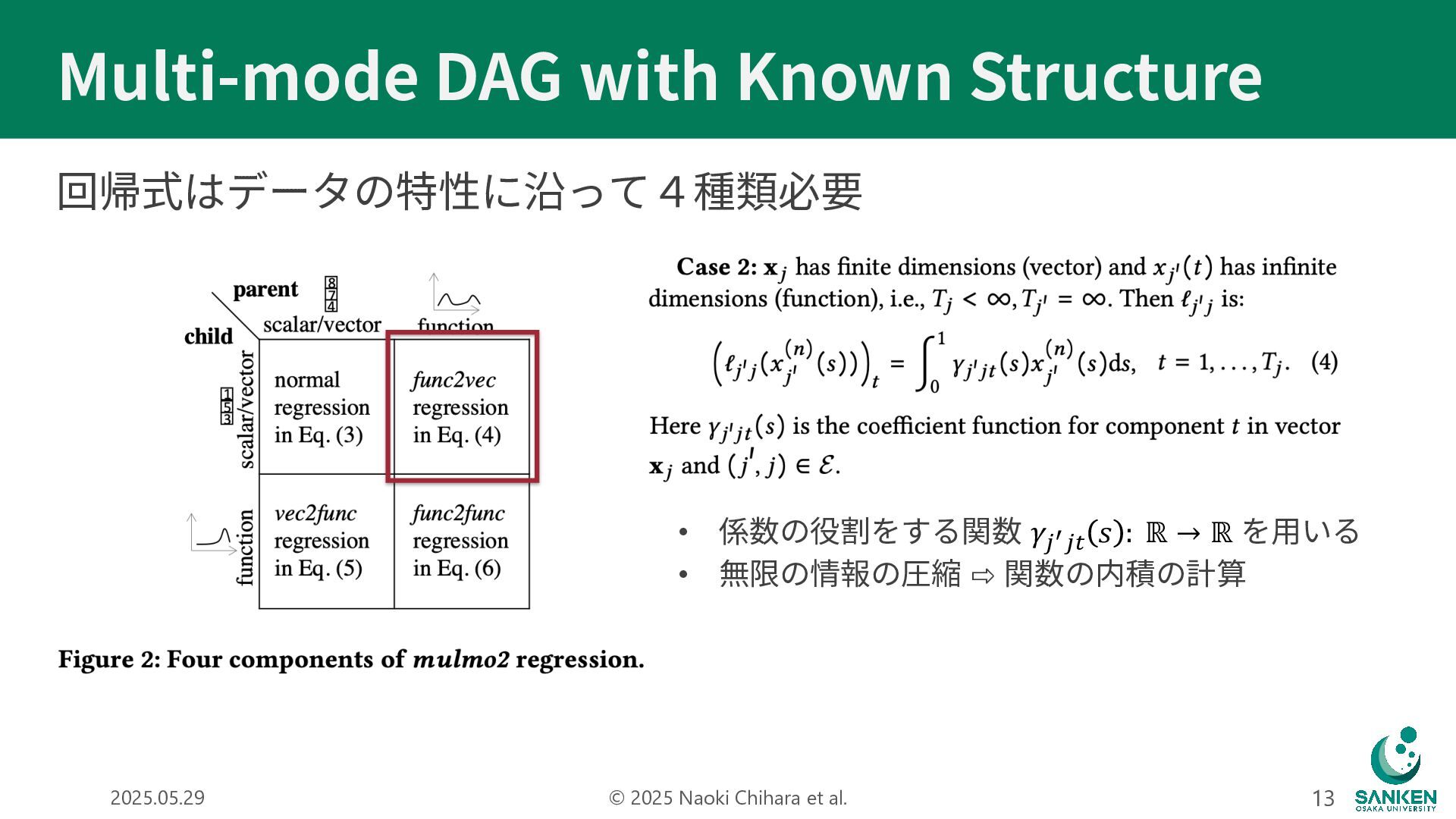
Multi-mode DAG with Known Structure 回帰式はデータの特性に沿って4種類必要 2025.05.29 © 2025 Naoki
Chihara et al. 13 • 係数の役割をする関数 𝛾!!!# 𝑠 : ℝ → ℝ を⽤いる • 無限の情報の圧縮 ⇨ 関数の内積の計算
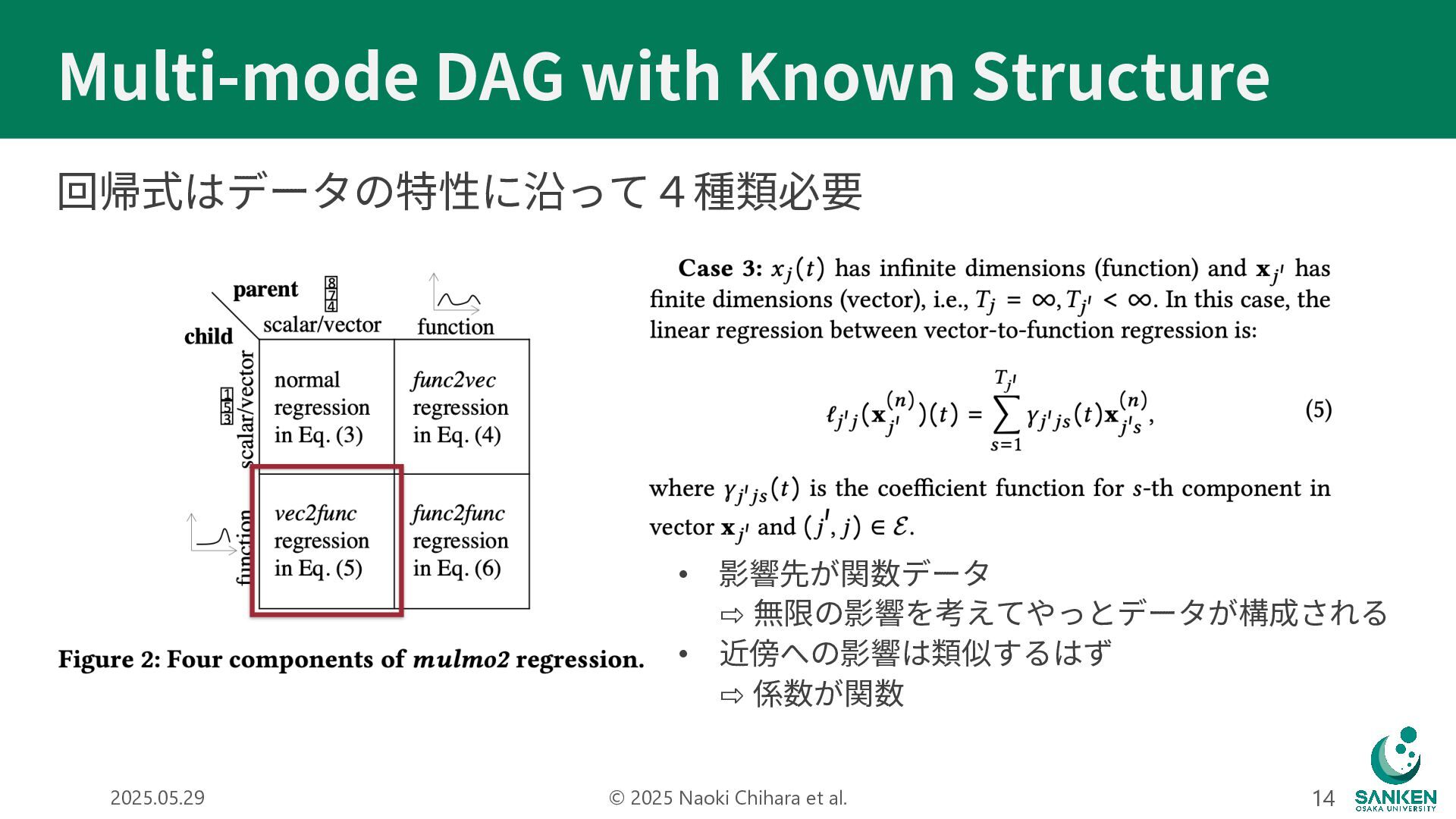
Multi-mode DAG with Known Structure 回帰式はデータの特性に沿って4種類必要 2025.05.29 © 2025 Naoki
Chihara et al. 14 • 影響先が関数データ ⇨ 無限の影響を考えてやっとデータが構成される • 近傍への影響は類似するはず ⇨ 係数が関数
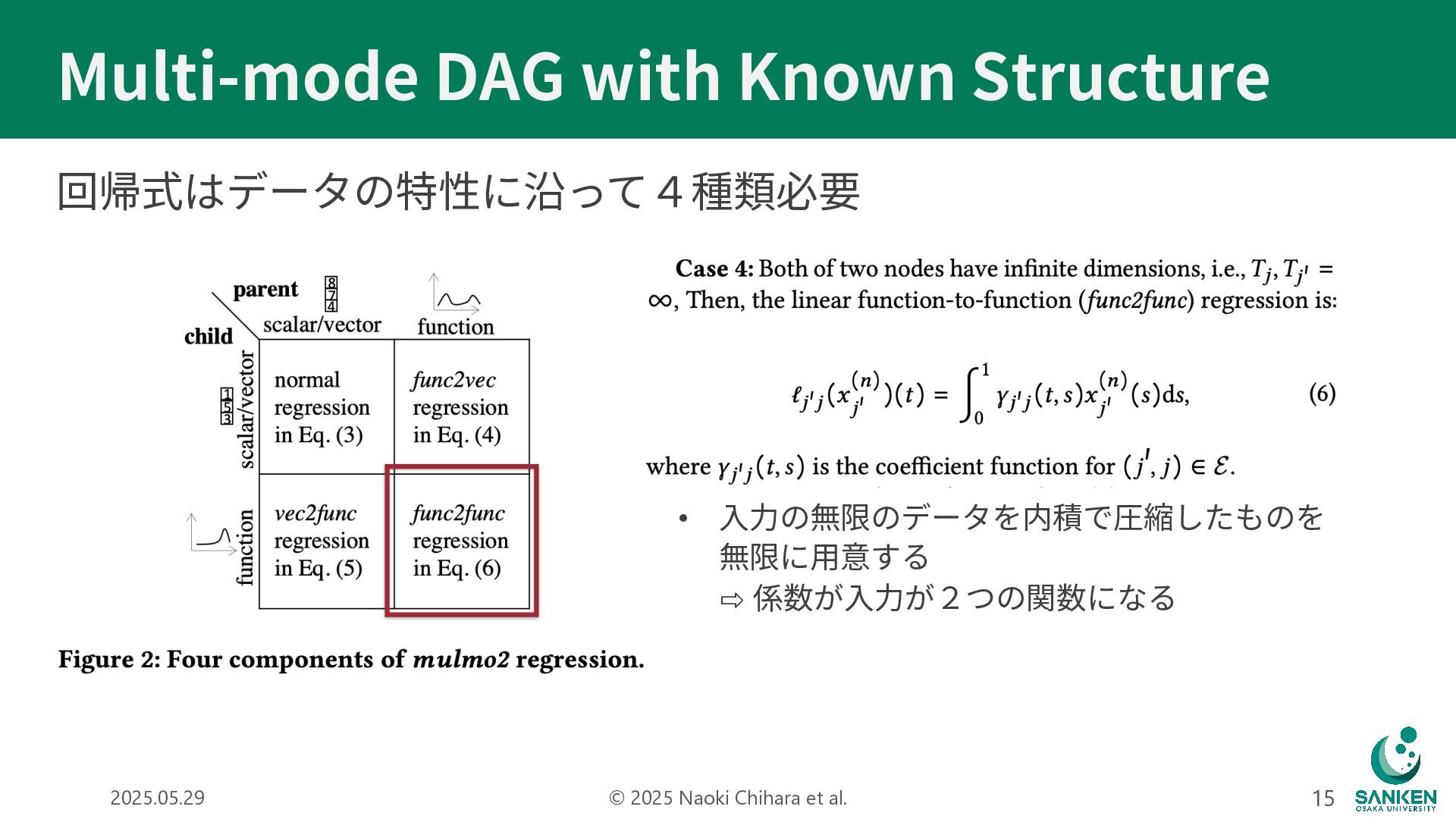
Multi-mode DAG with Known Structure 回帰式はデータの特性に沿って4種類必要 2025.05.29 © 2025 Naoki
Chihara et al. 15 • ⼊⼒の無限のデータを内積で圧縮したものを 無限に⽤意する ⇨ 係数が⼊⼒が2つの関数になる
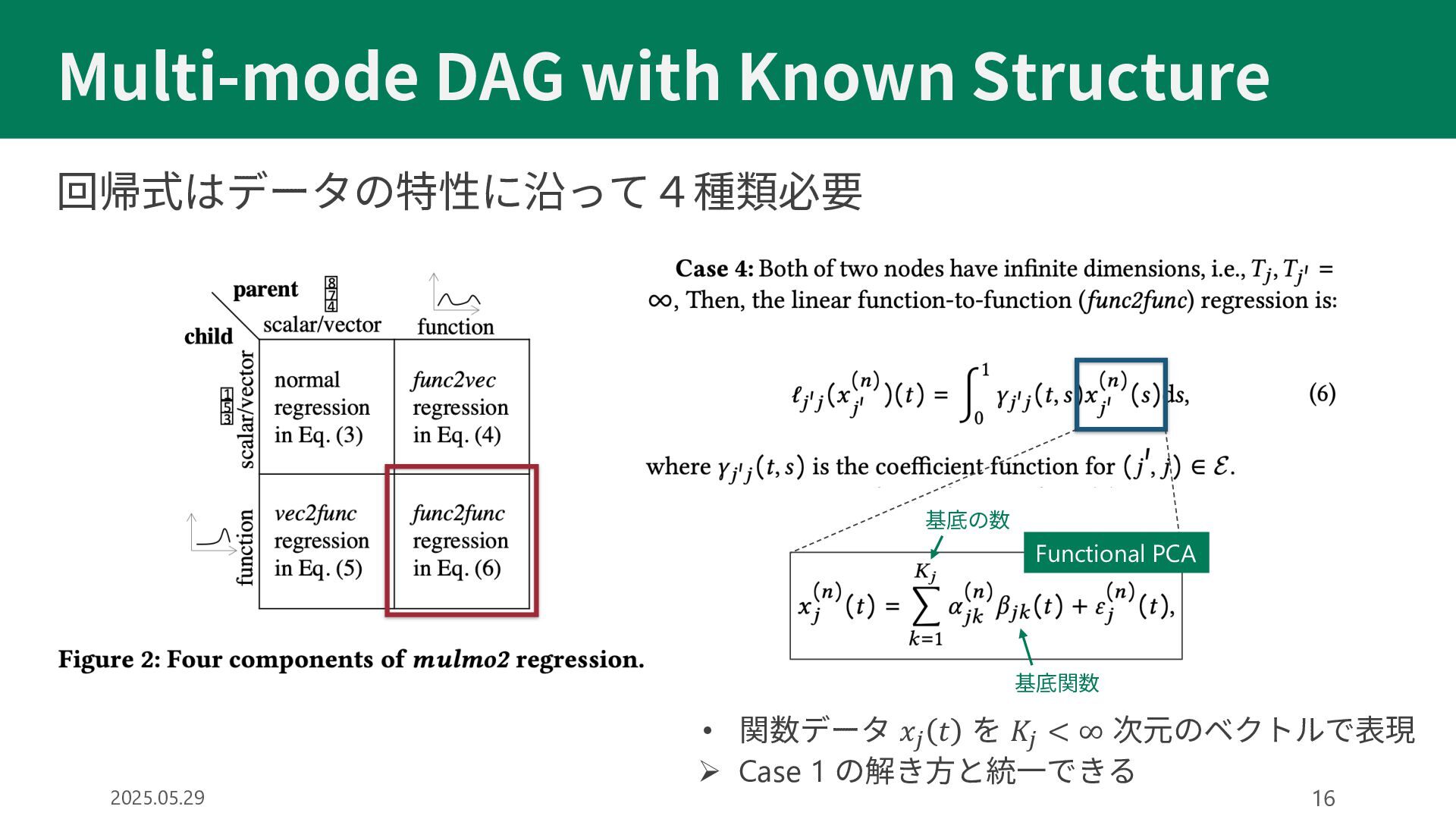
© 2025 Naoki Chihara et al. Multi-mode DAG with Known
Structure 回帰式はデータの特性に沿って4種類必要 2025.05.29 基底の数 基底関数 Functional PCA • 関数データ 𝑥! 𝑡 を 𝐾! < ∞ 次元のベクトルで表現 Ø Case 1 の解き⽅と統⼀できる 16
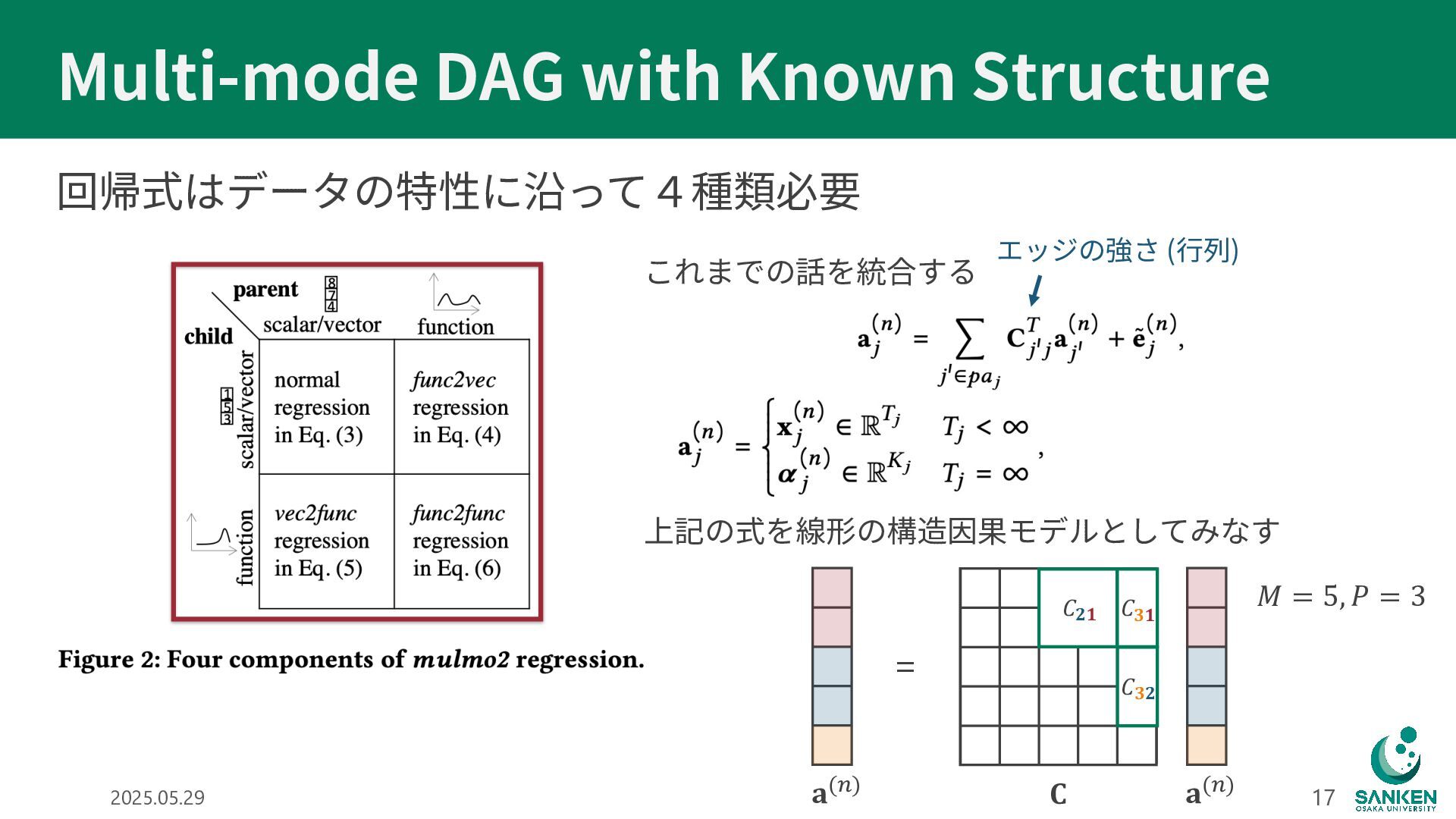
© 2025 Naoki Chihara et al. Multi-mode DAG with Known
Structure 回帰式はデータの特性に沿って4種類必要 2025.05.29 17 これまでの話を統合する エッジの強さ (⾏列) 上記の式を線形の構造因果モデルとしてみなす = 𝐚(%) 𝐚(%) 𝐂 𝐶𝟐𝟏 𝐶𝟑𝟏 𝐶𝟑𝟐 𝑀 = 5, 𝑃 = 3
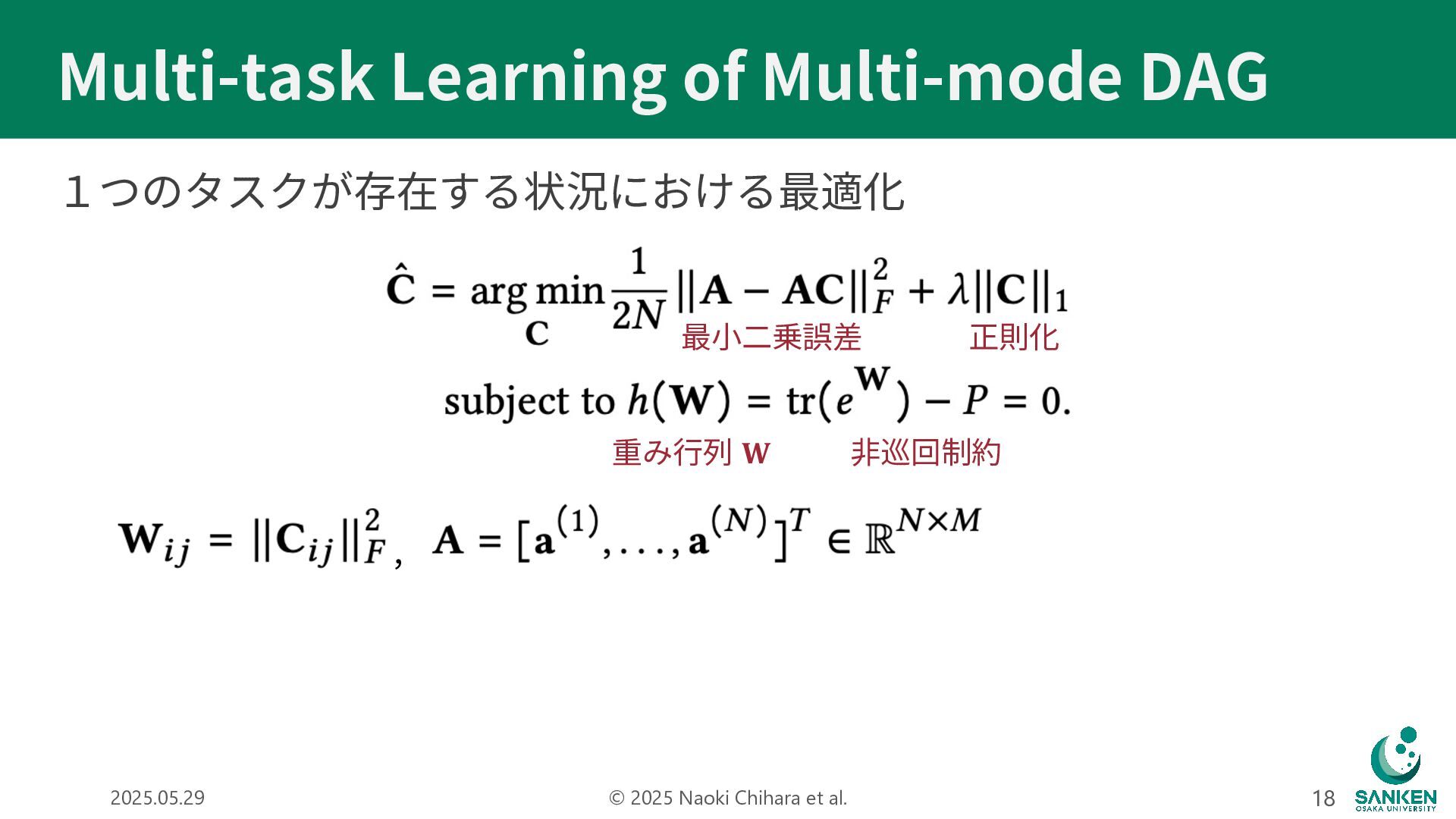
Multi-task Learning of Multi-mode DAG 1つのタスクが存在する状況における最適化 2025.05.29 © 2025 Naoki
Chihara et al. 18 重み⾏列 𝐖 , 最⼩⼆乗誤差 正則化 ⾮巡回制約
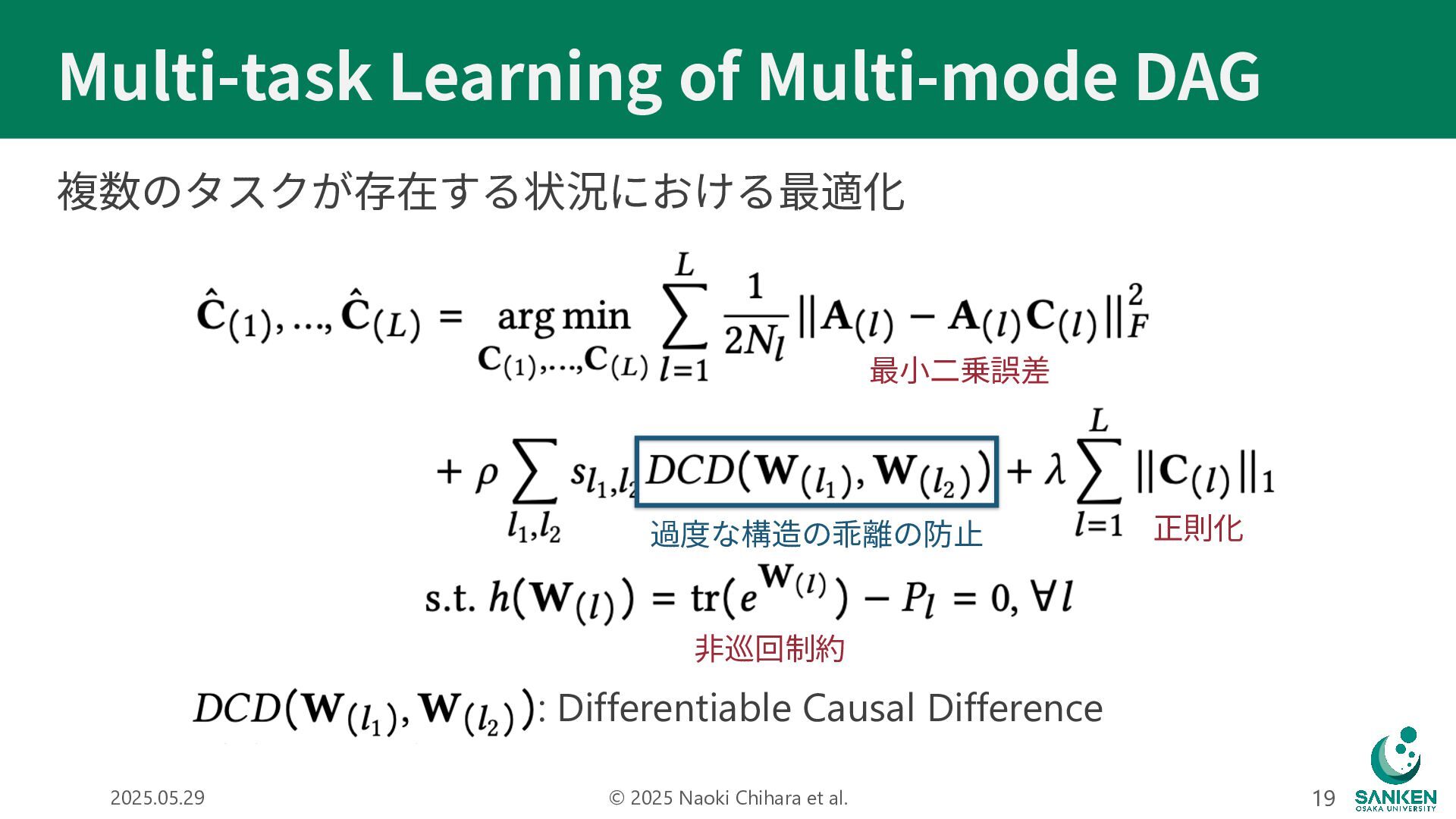
Multi-task Learning of Multi-mode DAG 複数のタスクが存在する状況における最適化 2025.05.29 © 2025 Naoki
Chihara et al. 19 , : Differentiable Causal Difference 最⼩⼆乗誤差 過度な構造の乖離の防⽌ 正則化 ⾮巡回制約
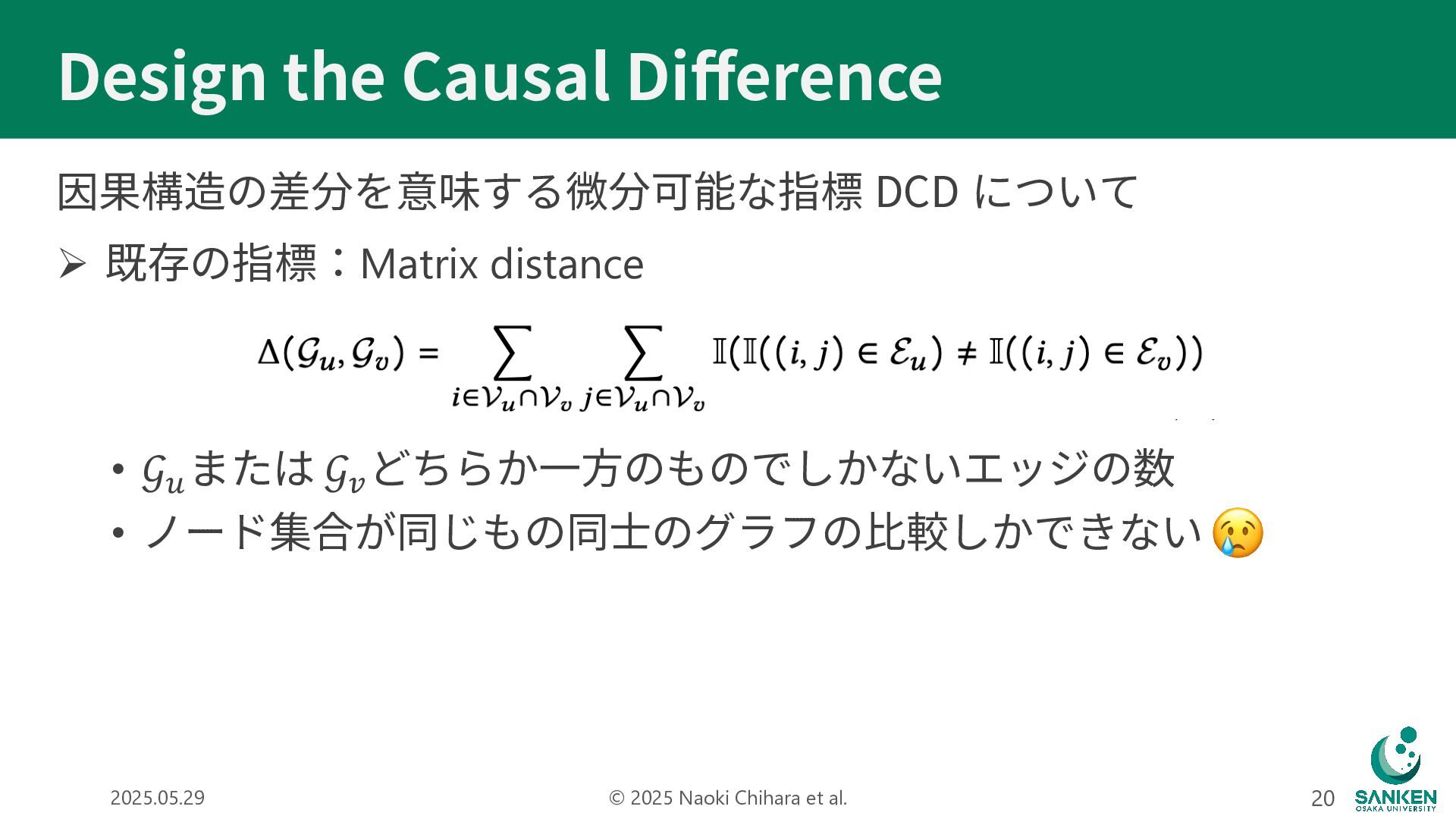
Design the Causal Difference 因果構造の差分を意味する微分可能な指標 DCD について Ø 既存の指標:Matrix distance
• 𝒢< または 𝒢= どちらか⼀⽅のものでしかないエッジの数 • ノード集合が同じもの同⼠のグラフの⽐較しかできない 2025.05.29 © 2025 Naoki Chihara et al. 20 😢
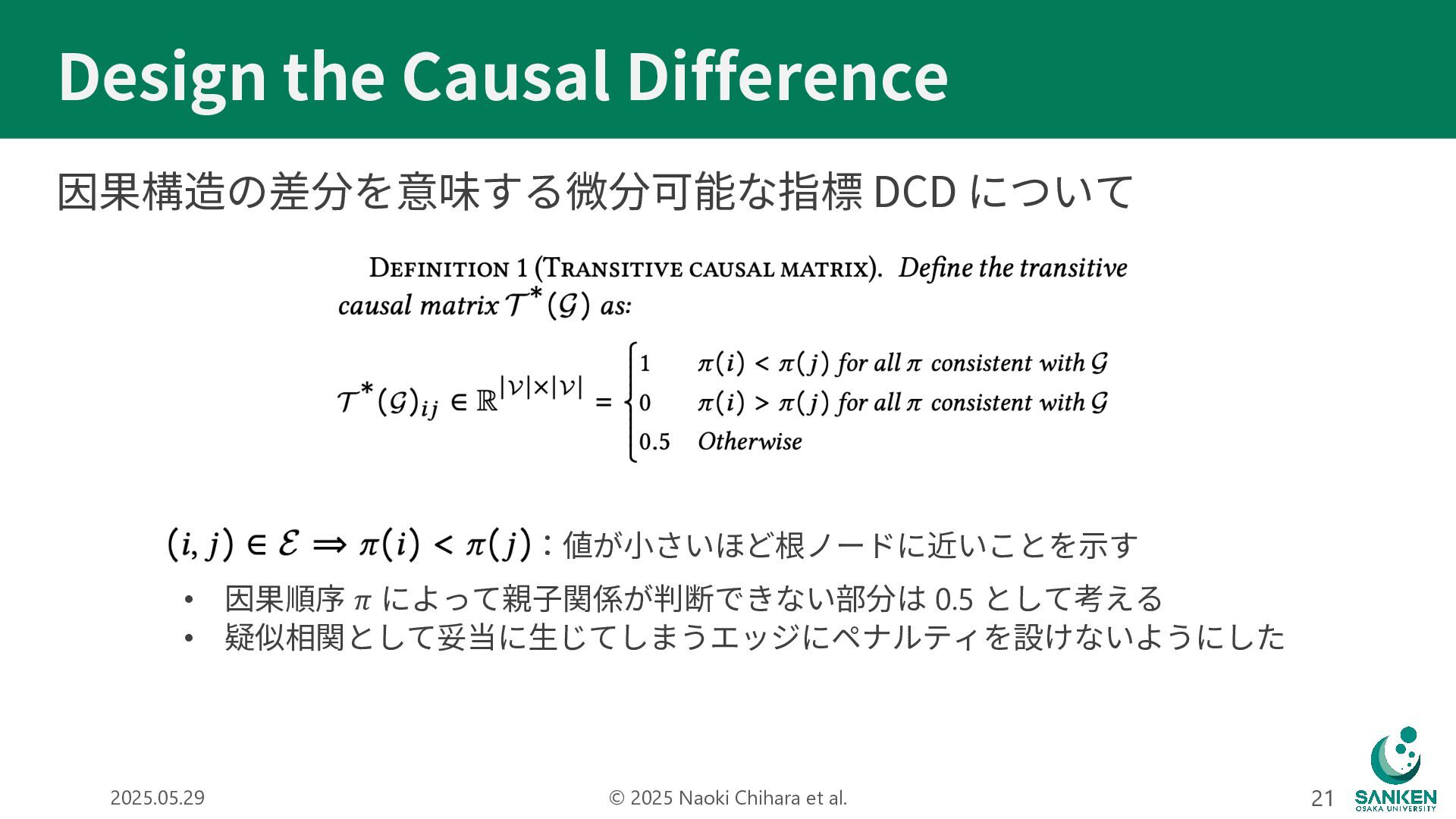
Design the Causal Difference 因果構造の差分を意味する微分可能な指標 DCD について 2025.05.29 © 2025
Naoki Chihara et al. 21 :値が⼩さいほど根ノードに近いことを⽰す • 因果順序 𝜋 によって親⼦関係が判断できない部分は 0.5 として考える • 疑似相関として妥当に⽣じてしまうエッジにペナルティを設けないようにした
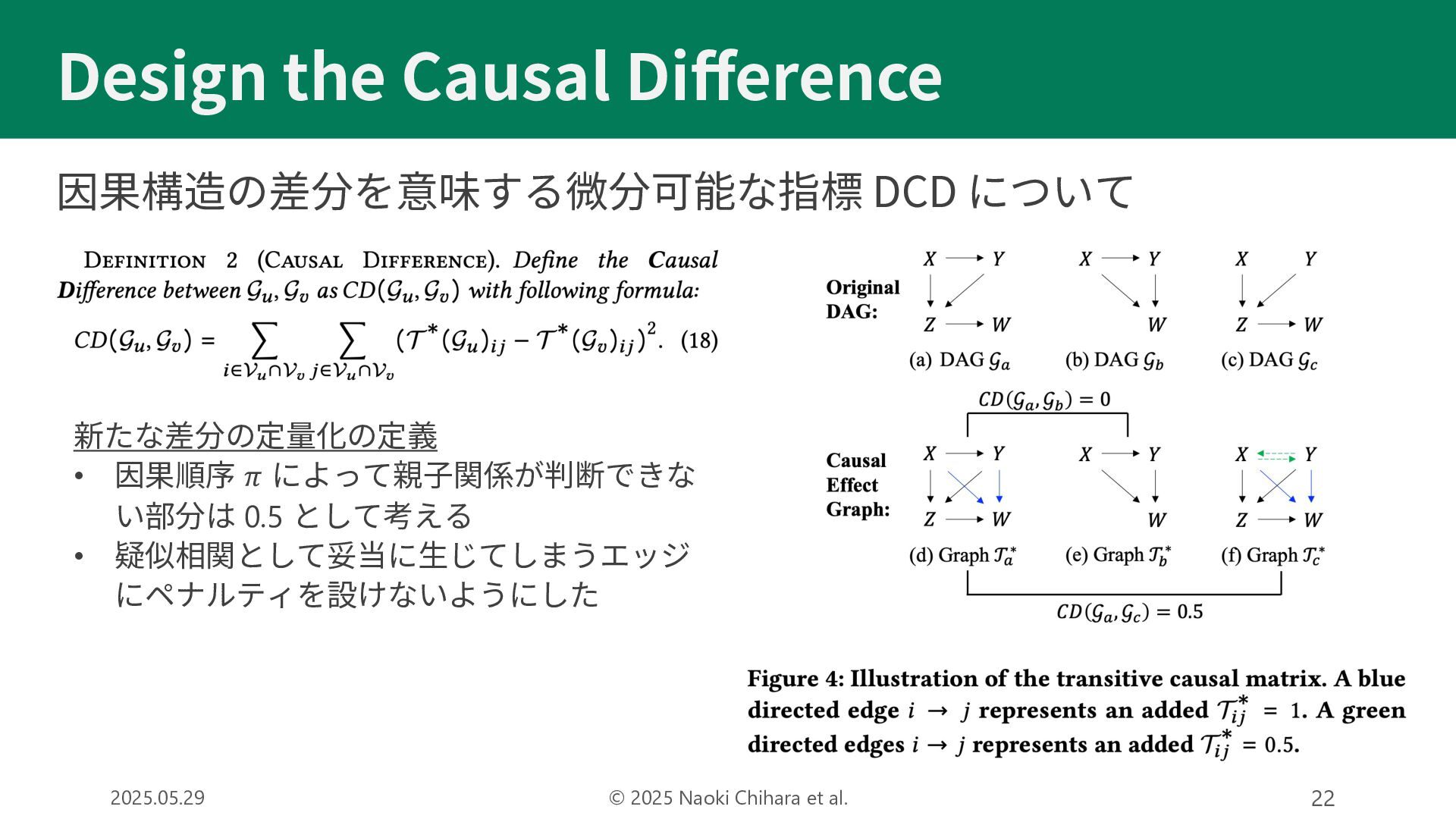
Design the Causal Difference 因果構造の差分を意味する微分可能な指標 DCD について 2025.05.29 © 2025
Naoki Chihara et al. 22 新たな差分の定量化の定義 • 因果順序 𝜋 によって親⼦関係が判断できな い部分は 0.5 として考える • 疑似相関として妥当に⽣じてしまうエッジ にペナルティを設けないようにした
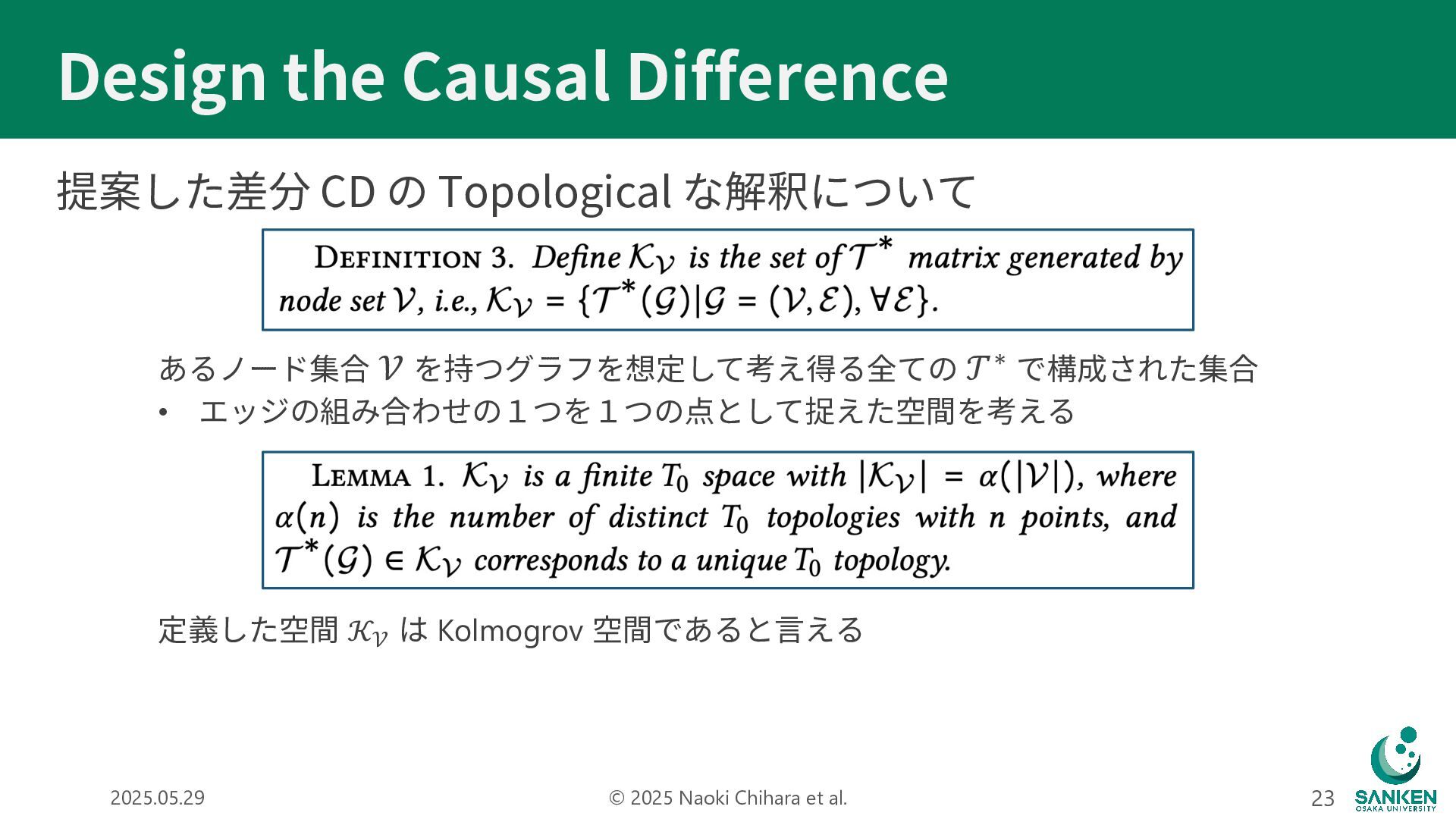
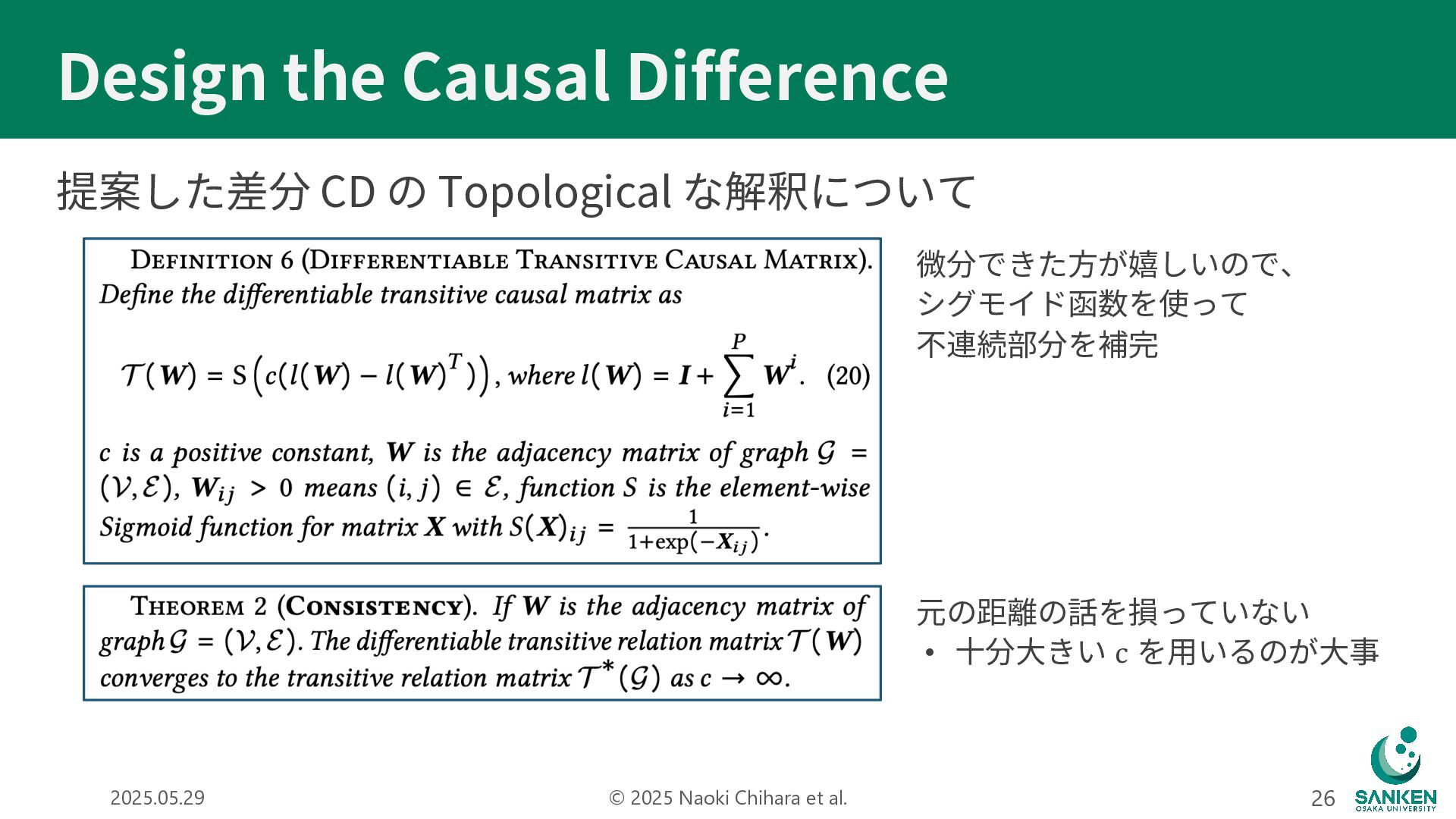
Design the Causal Difference 提案した差分 CD の Topological な解釈について 2025.05.29
© 2025 Naoki Chihara et al. 23 あるノード集合 𝒱 を持つグラフを想定して考え得る全ての 𝒯∗ で構成された集合 • エッジの組み合わせの1つを1つの点として捉えた空間を考える 定義した空間 𝒦𝒱 は Kolmogrov 空間であると⾔える
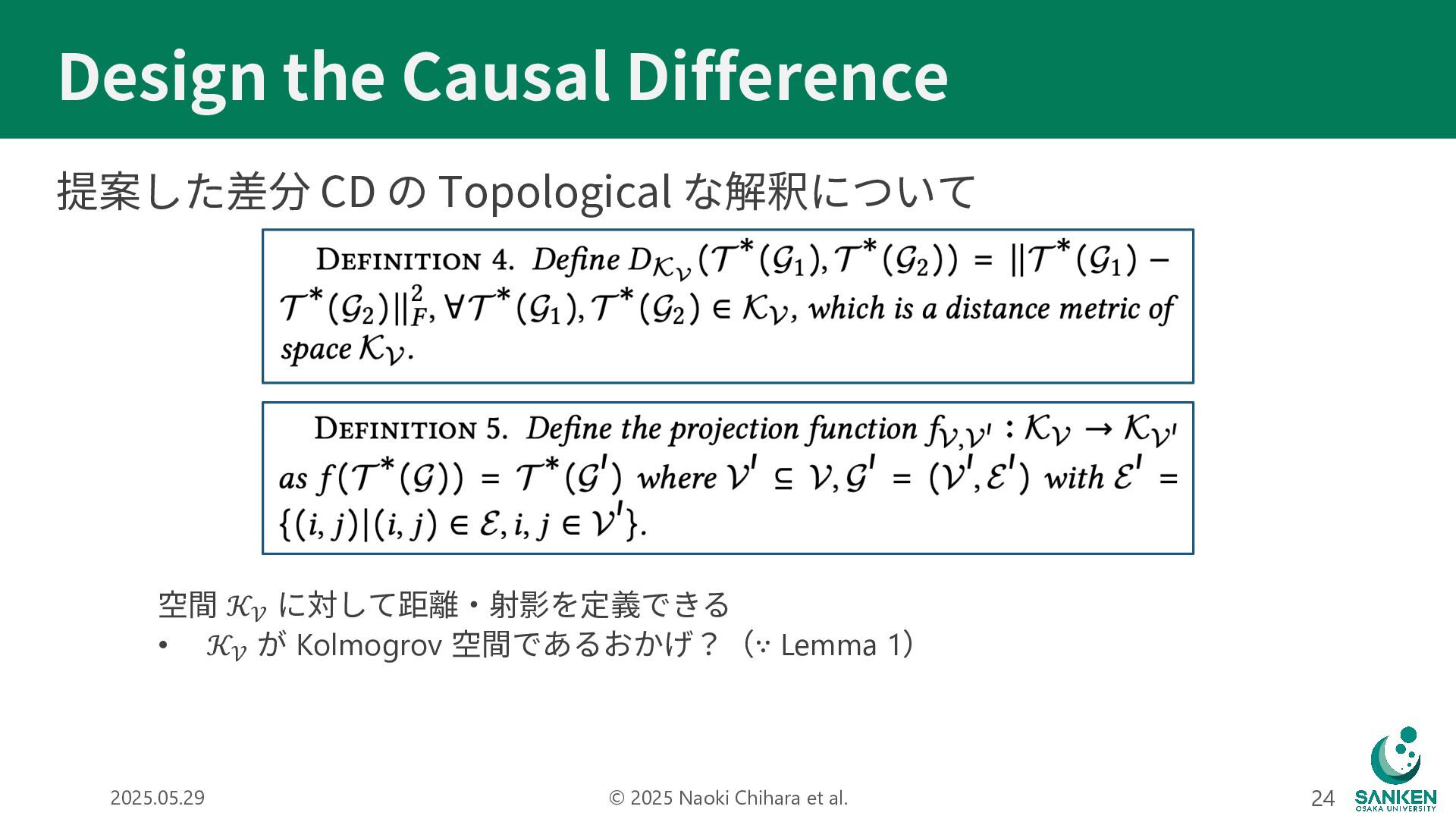
Design the Causal Difference 提案した差分 CD の Topological な解釈について 2025.05.29
© 2025 Naoki Chihara et al. 24 空間 𝒦𝒱 に対して距離‧射影を定義できる • 𝒦𝒱 が Kolmogrov 空間であるおかげ?(∵ Lemma 1)
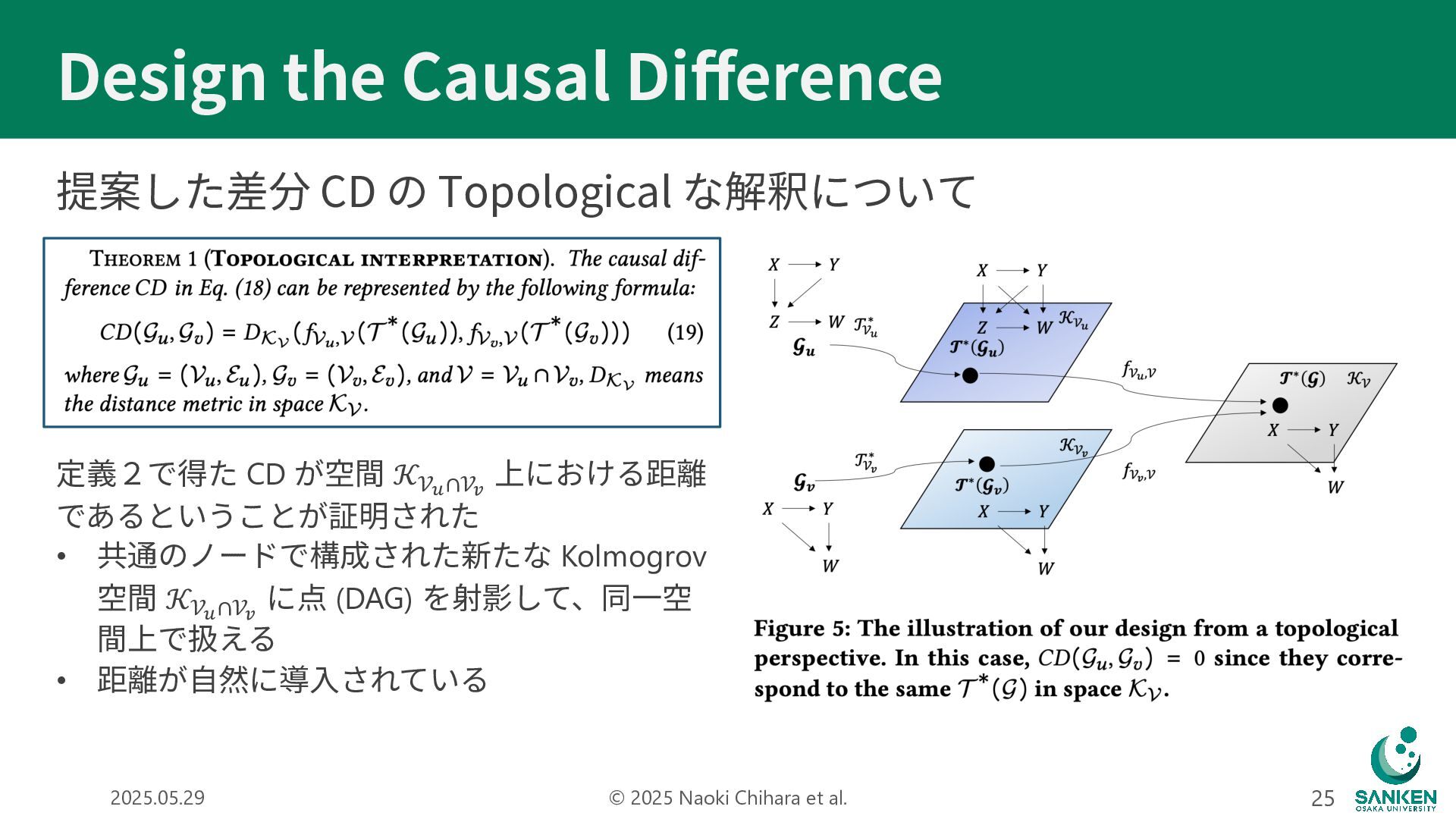
Design the Causal Difference 提案した差分 CD の Topological な解釈について 2025.05.29
© 2025 Naoki Chihara et al. 25 定義2で得た CD が空間 𝒦𝒱%∩𝒱& 上における距離 であるということが証明された • 共通のノードで構成された新たな Kolmogrov 空間 𝒦𝒱%∩𝒱& に点 (DAG) を射影して、同⼀空 間上で扱える • 距離が⾃然に導⼊されている
Design the Causal Difference 提案した差分 CD の Topological な解釈について 2025.05.29
© 2025 Naoki Chihara et al. 26 微分できた⽅が嬉しいので、 シグモイド函数を使って 不連続部分を補完 元の距離の話を損っていない • ⼗分⼤きい c を⽤いるのが⼤事
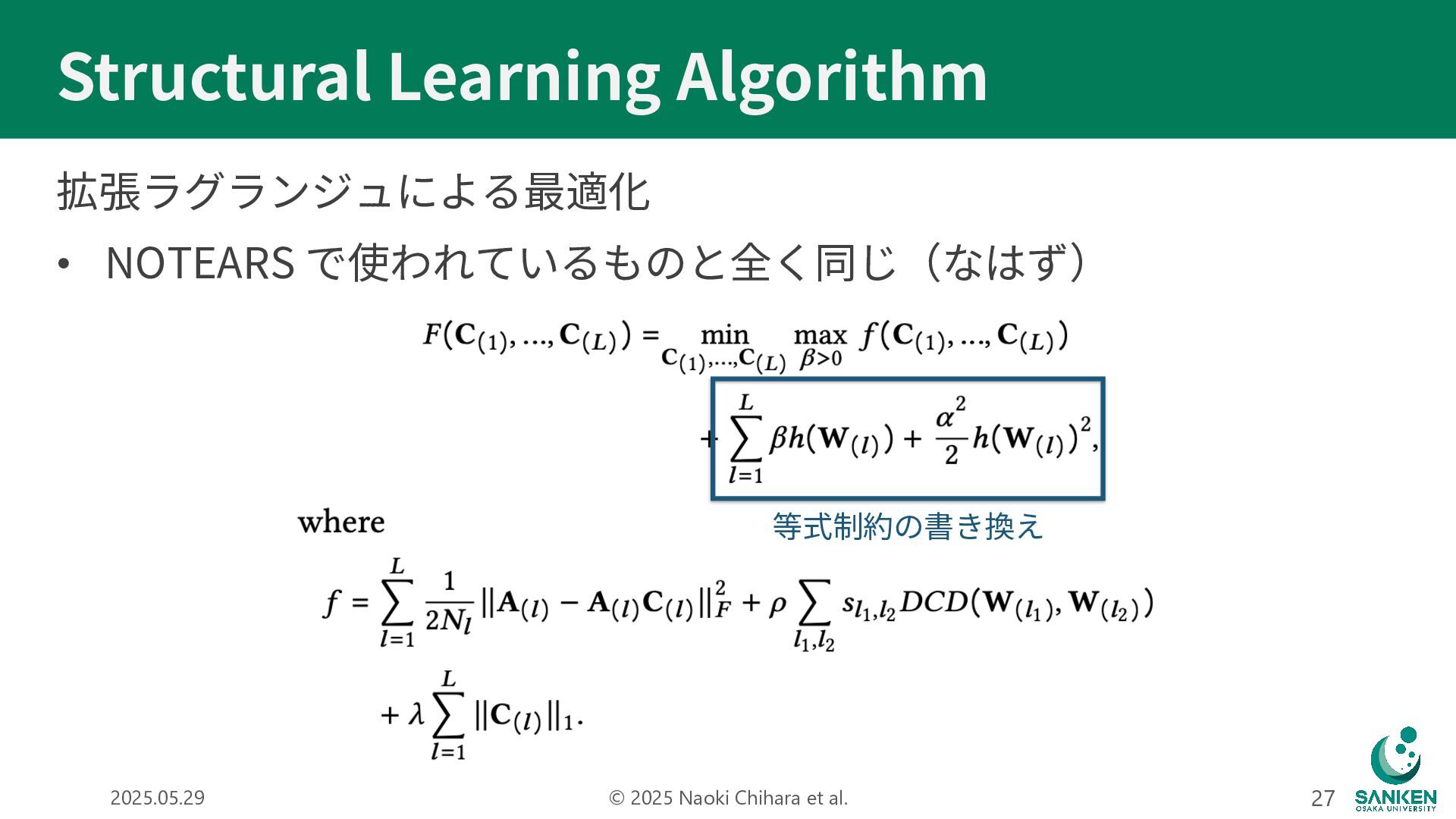
Structural Learning Algorithm 拡張ラグランジュによる最適化 • NOTEARS で使われているものと全く同じ(なはず) 2025.05.29 © 2025
Naoki Chihara et al. 27 等式制約の書き換え
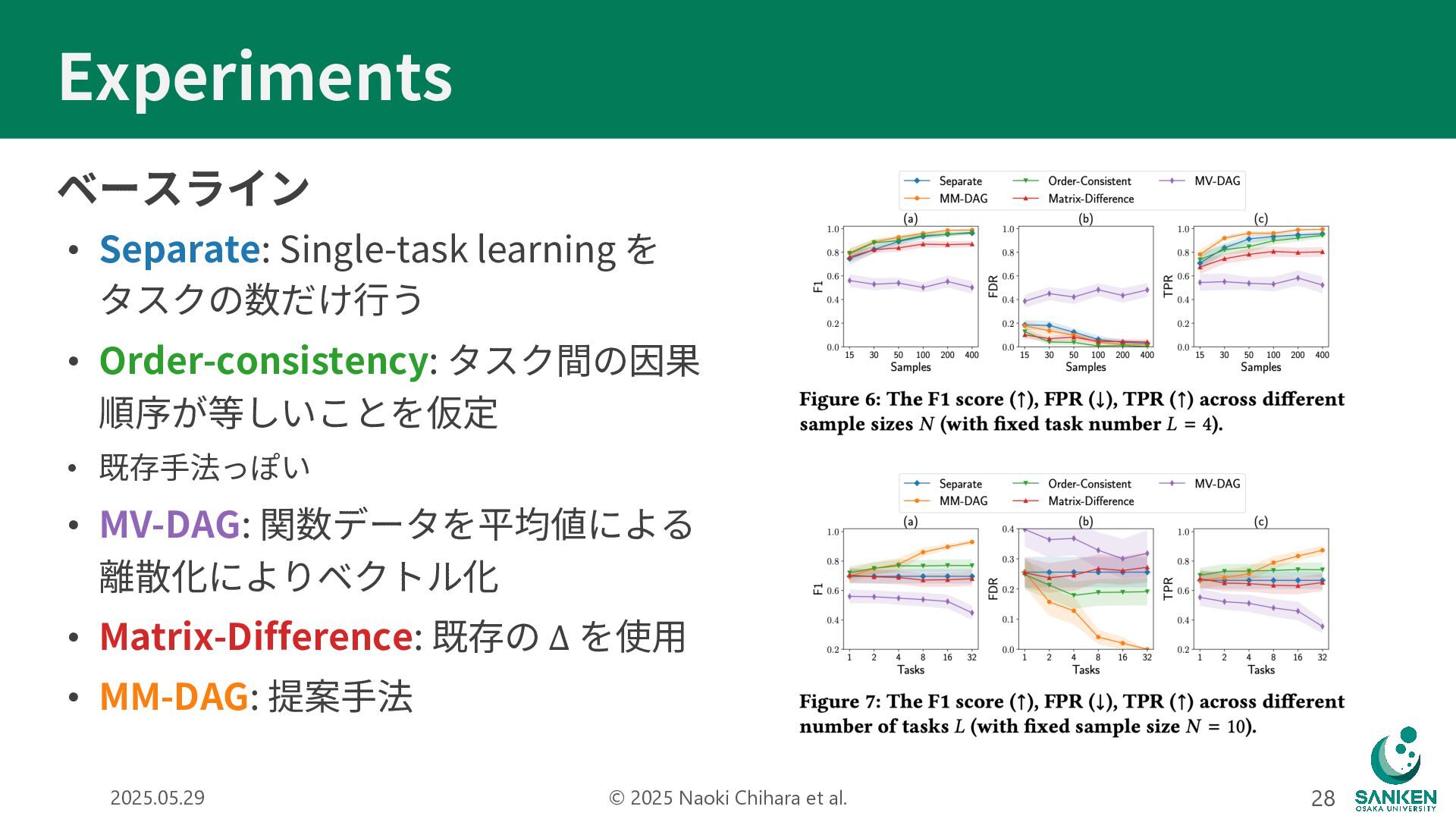
Experiments ベースライン • Separate: Single-task learning を タスクの数だけ⾏う • Order-consistency:
タスク間の因果 順序が等しいことを仮定 • 既存⼿法っぽい • MV-DAG: 関数データを平均値による 離散化によりベクトル化 • Matrix-Difference: 既存の Δ を使⽤ • MM-DAG: 提案⼿法 2025.05.29 © 2025 Naoki Chihara et al. 28
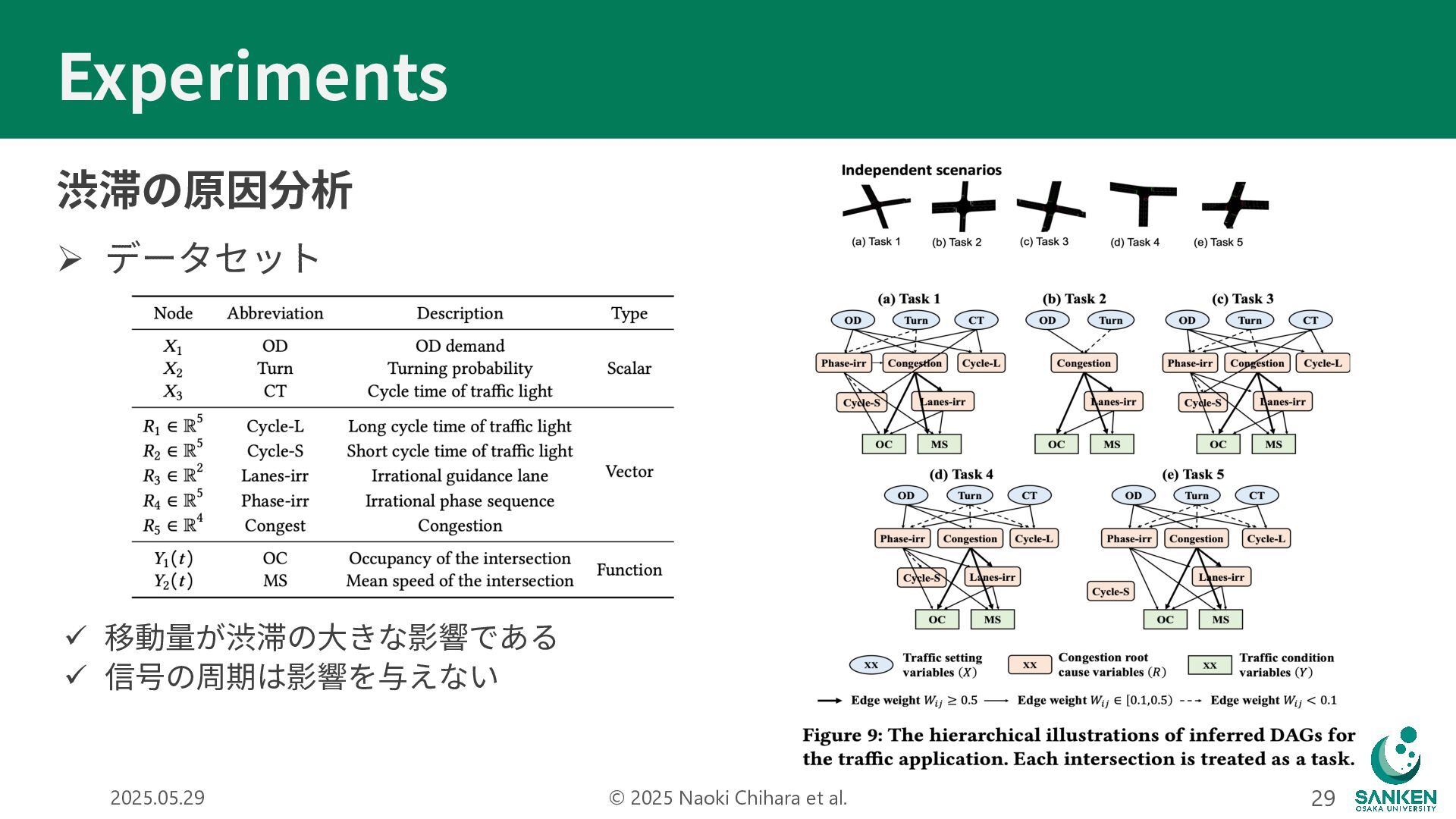
Experiments 渋滞の原因分析 Ø データセット 2025.05.29 © 2025 Naoki Chihara et
al. 29 ü 移動量が渋滞の⼤きな影響である ü 信号の周期は影響を与えない
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}