Cálculo Numérico começam por aí, porque faremos diferente? Nem todos! Mas a resposta real é: “O método de eliminação de Gauss não acrescenta conceitos novos à Álgebra Linear Computacional”.
linhas da matriz. Vi num livro tradicional! Sim, e um colega do semestre anterior disse: “O método de eliminação de Gauss é uma chateação, só contas! ”
da matemática. Elas são o objeto de todo o Cálculo Diferencial e Integral. Em particular, vamos considerar funções de um espaço vetorial U em um outro espaço vetorial V : : → , ∈ ⟼ = () ∈ .
⟼ ( + ) = + , • ⟼ = (). Tais funções recebem o nome especial de transformações lineares. Particularizando ainda mais: funções : → de um espaço vetorial U para outro V que preservam as operações nativas de U e V.
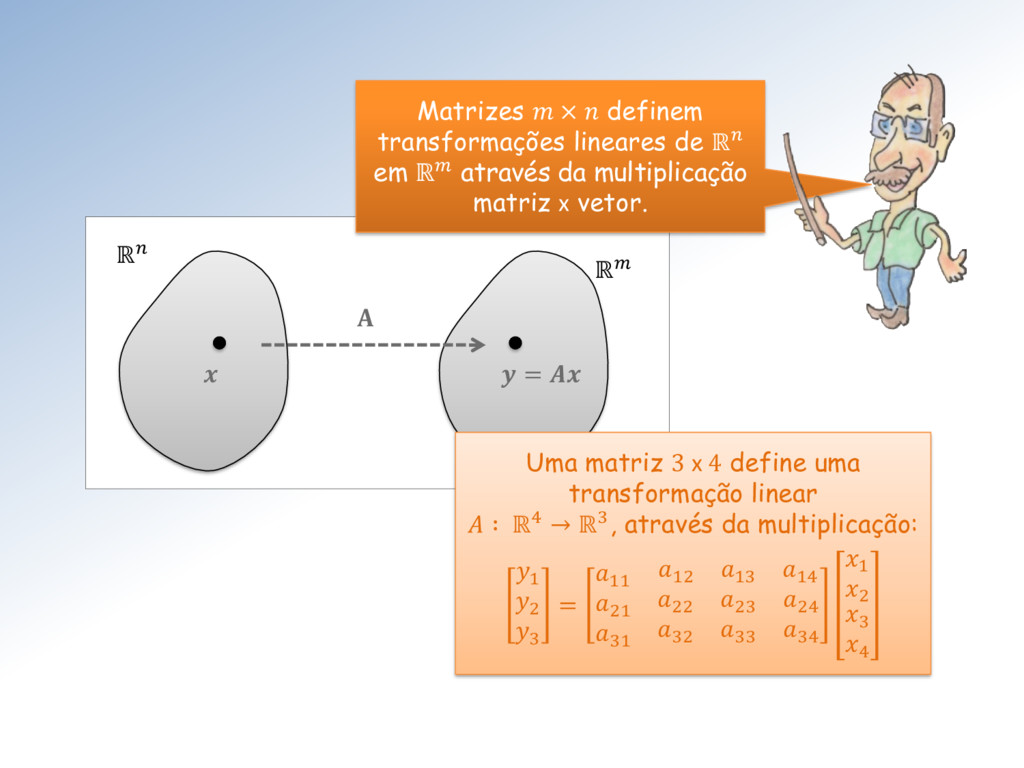
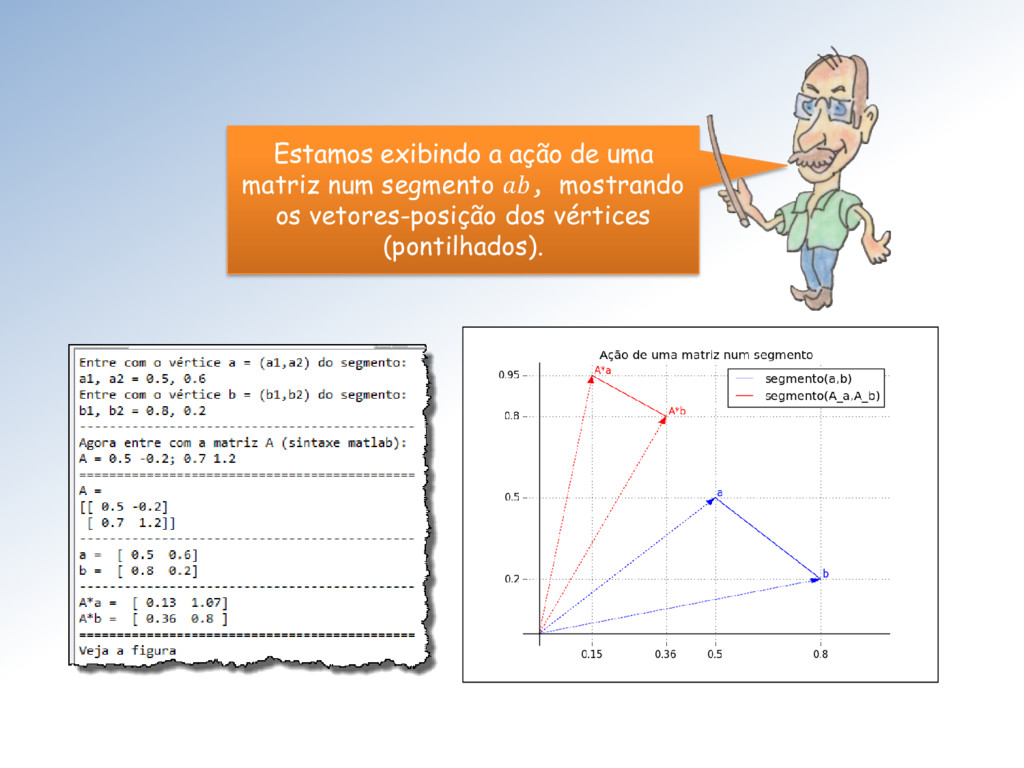
ℝ em ℝ através da multiplicação matriz x vetor. Uma matriz 3 x 4 define uma transformação linear ∶ ℝ4 → ℝ3, através da multiplicação: 1 2 3 = 11 12 13 14 21 22 23 24 31 32 33 34 1 2 3 4
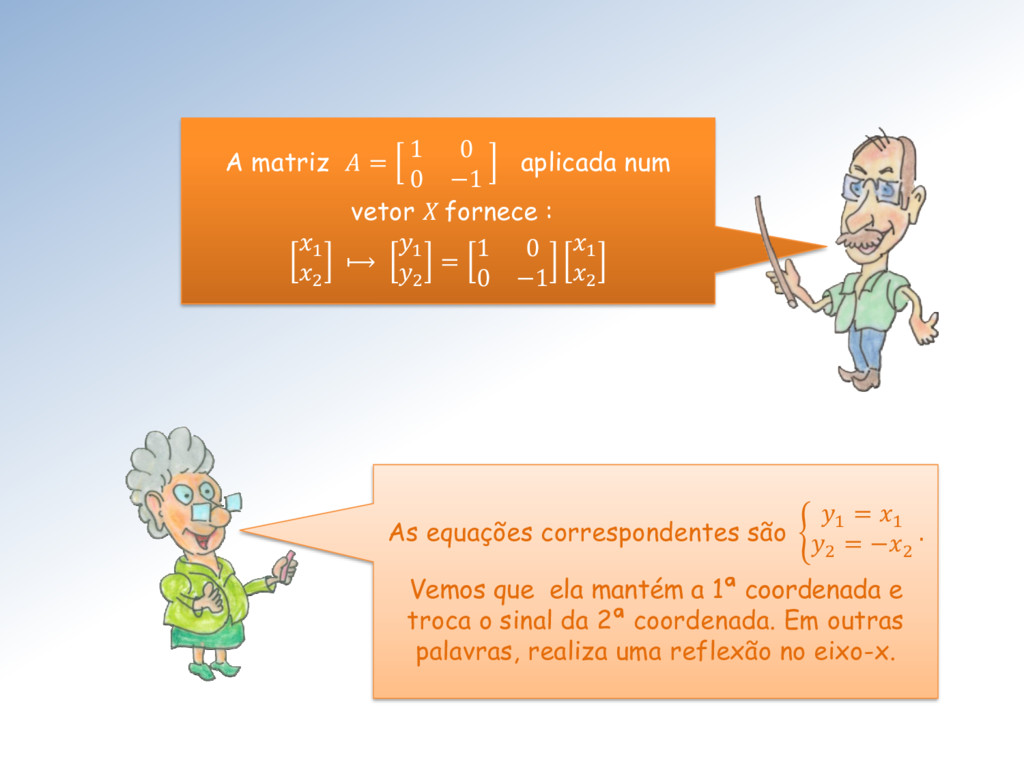
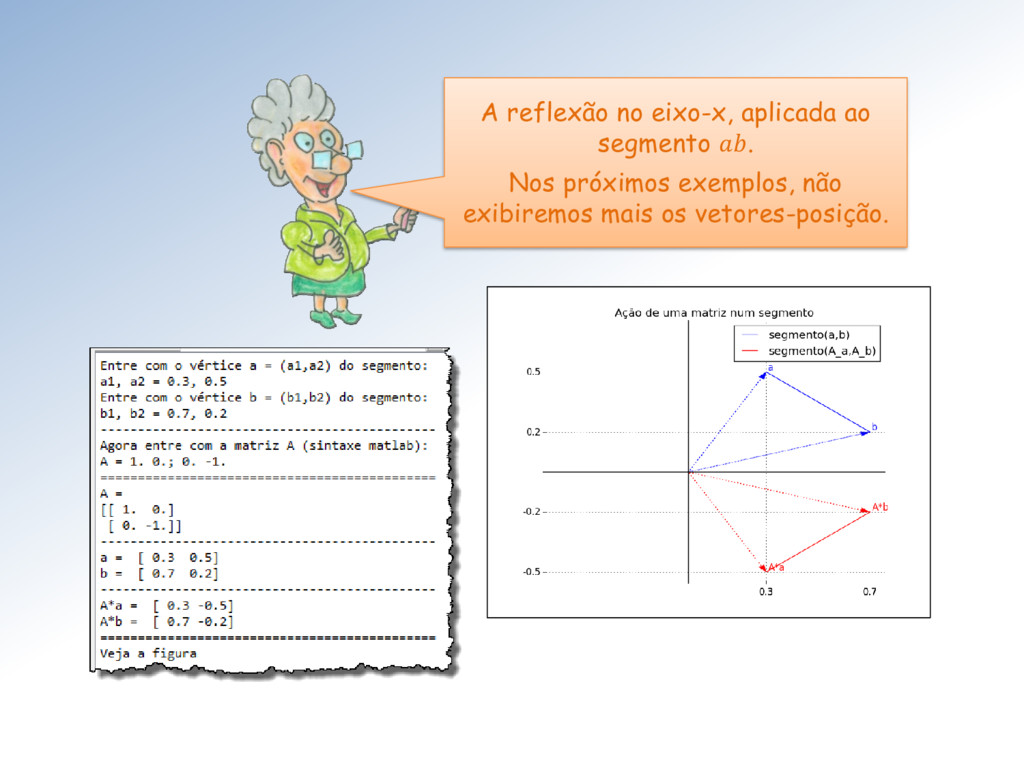
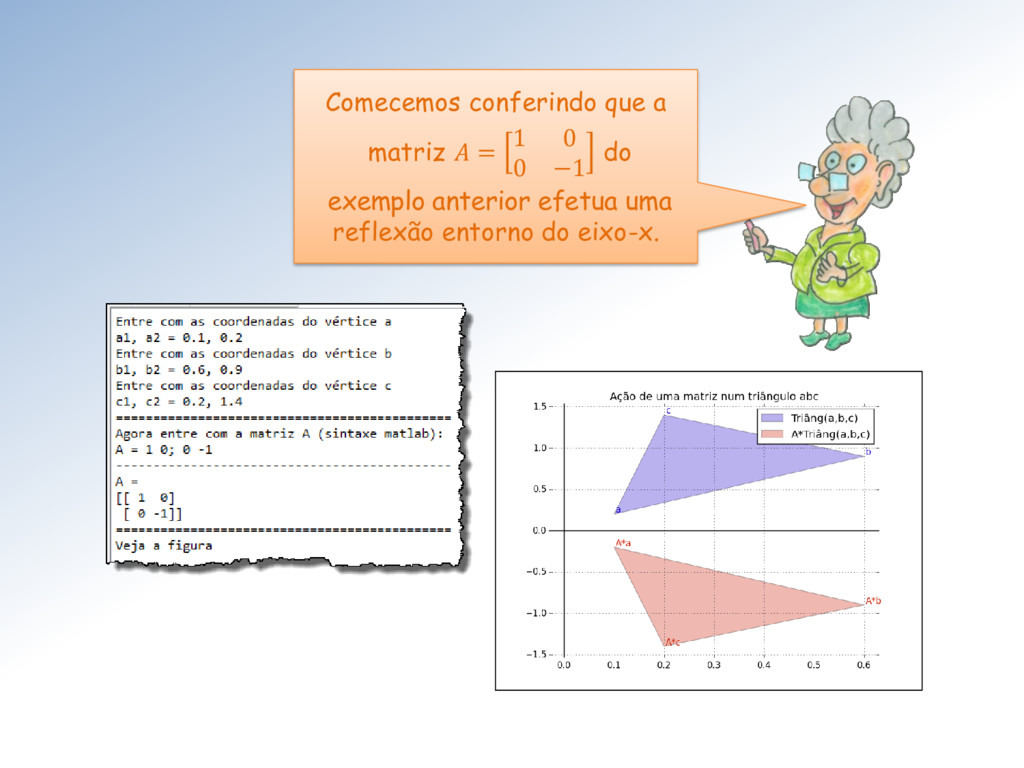
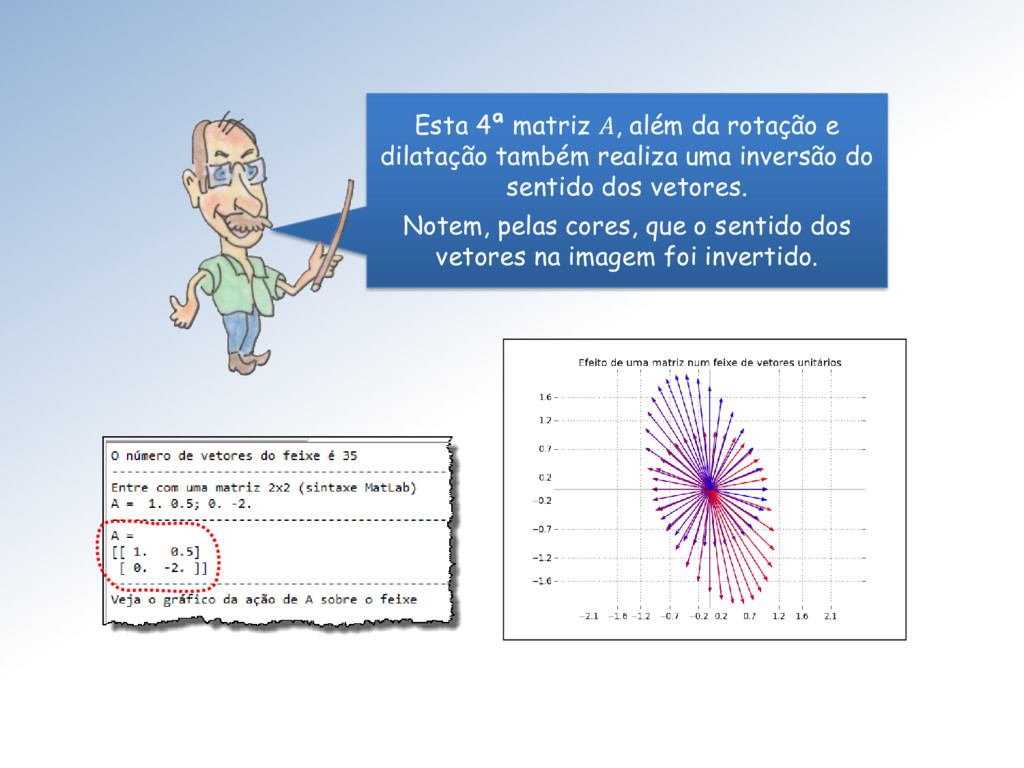
−2 . Vemos que ela mantém a 1ª coordenada e troca o sinal da 2ª coordenada. Em outras palavras, realiza uma reflexão no eixo-x. A matriz = 1 0 0 −1 aplicada num vetor X fornece : 1 2 ⟼ 1 2 = 1 0 0 −1 1 2
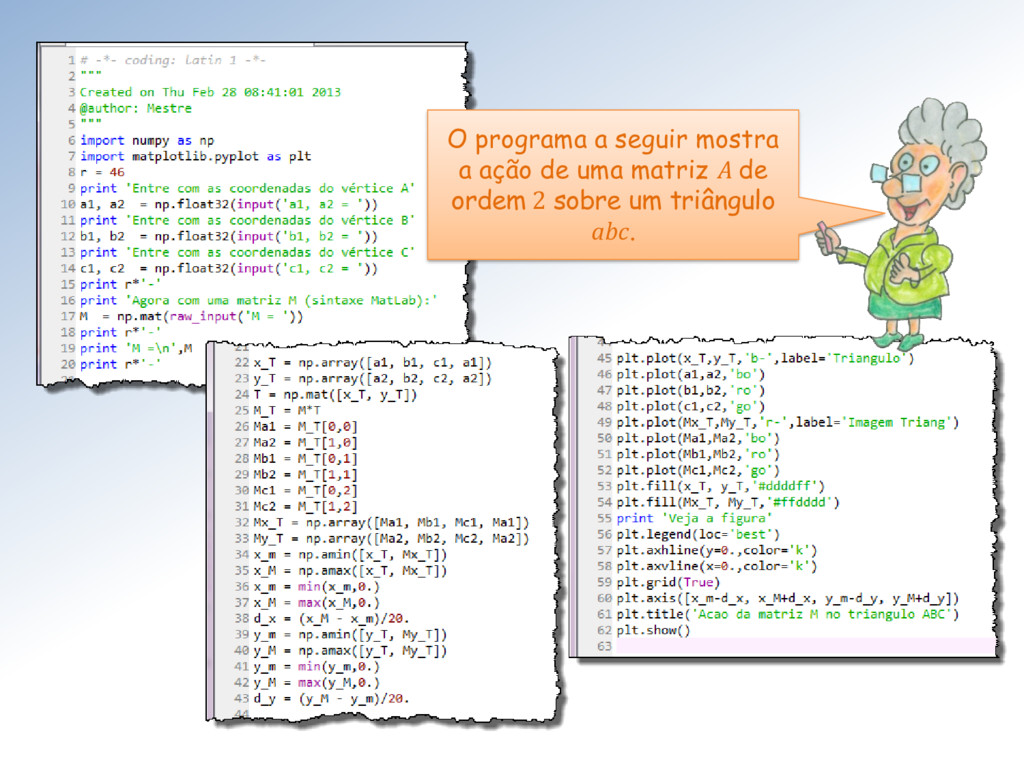
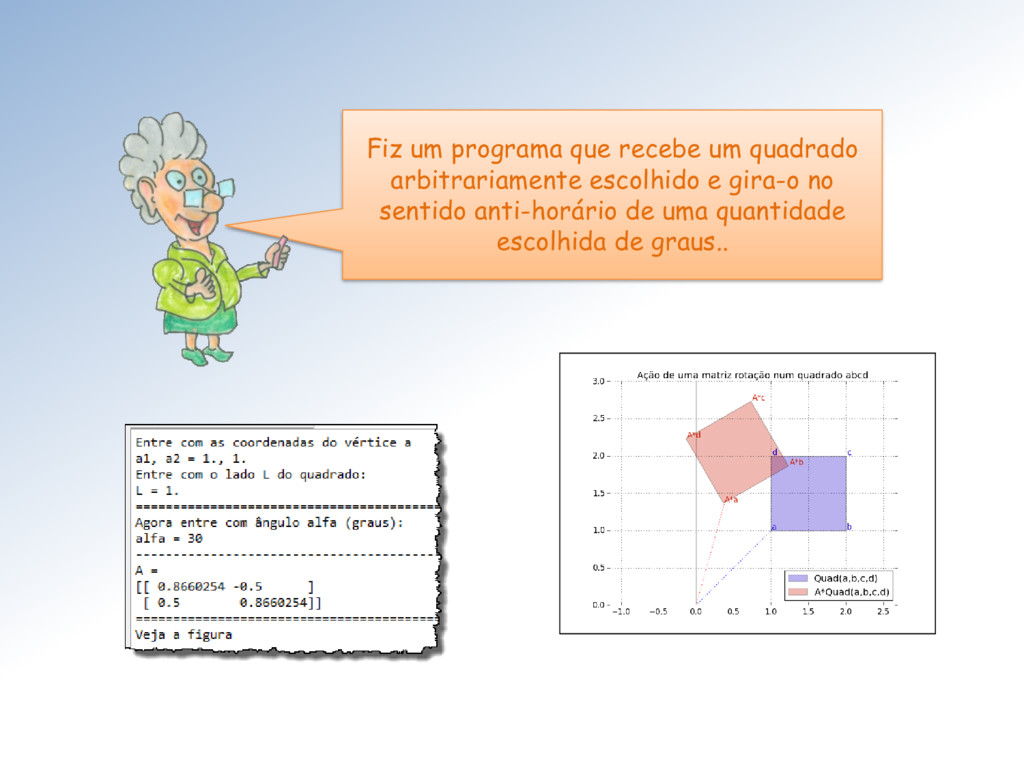
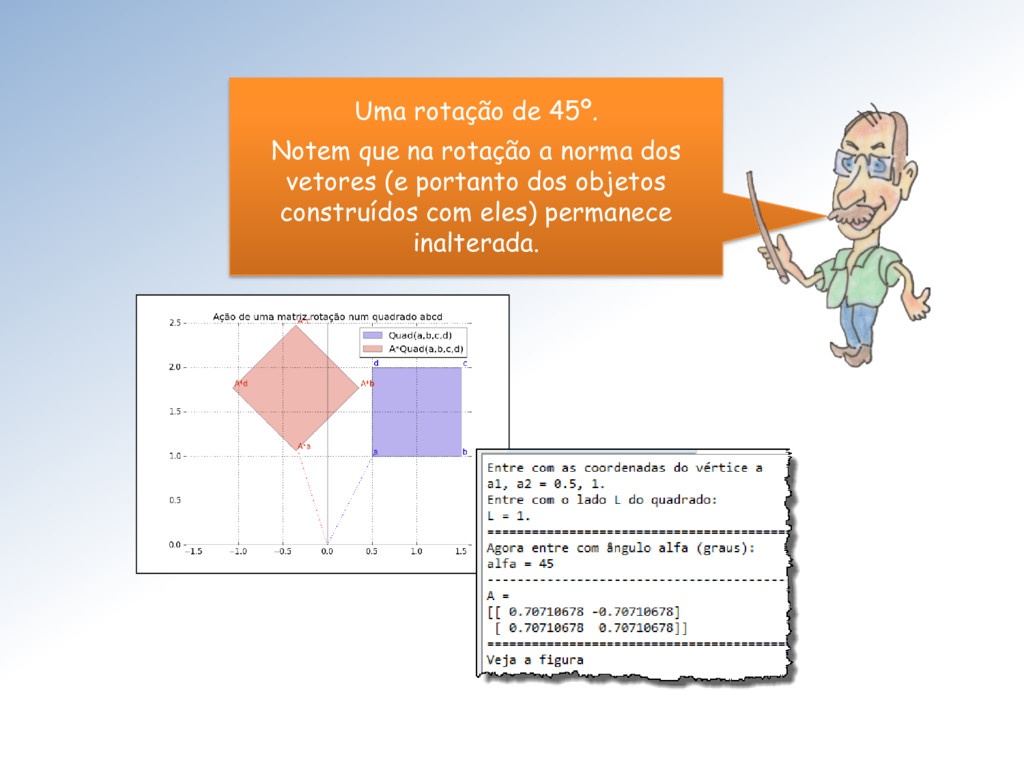
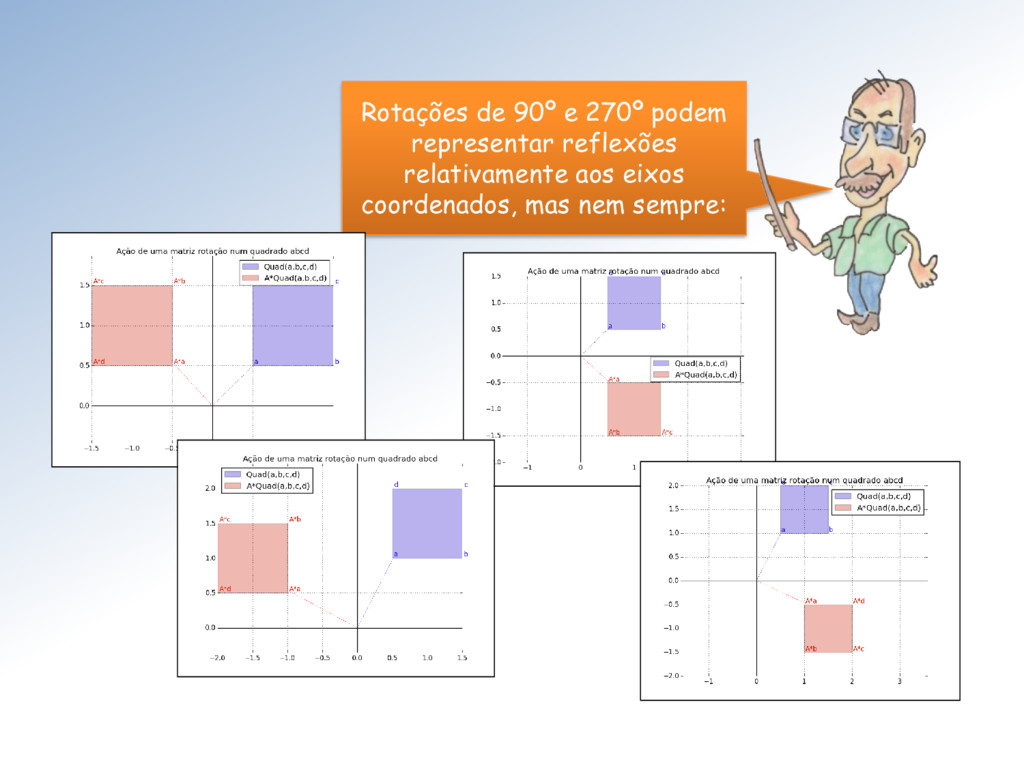
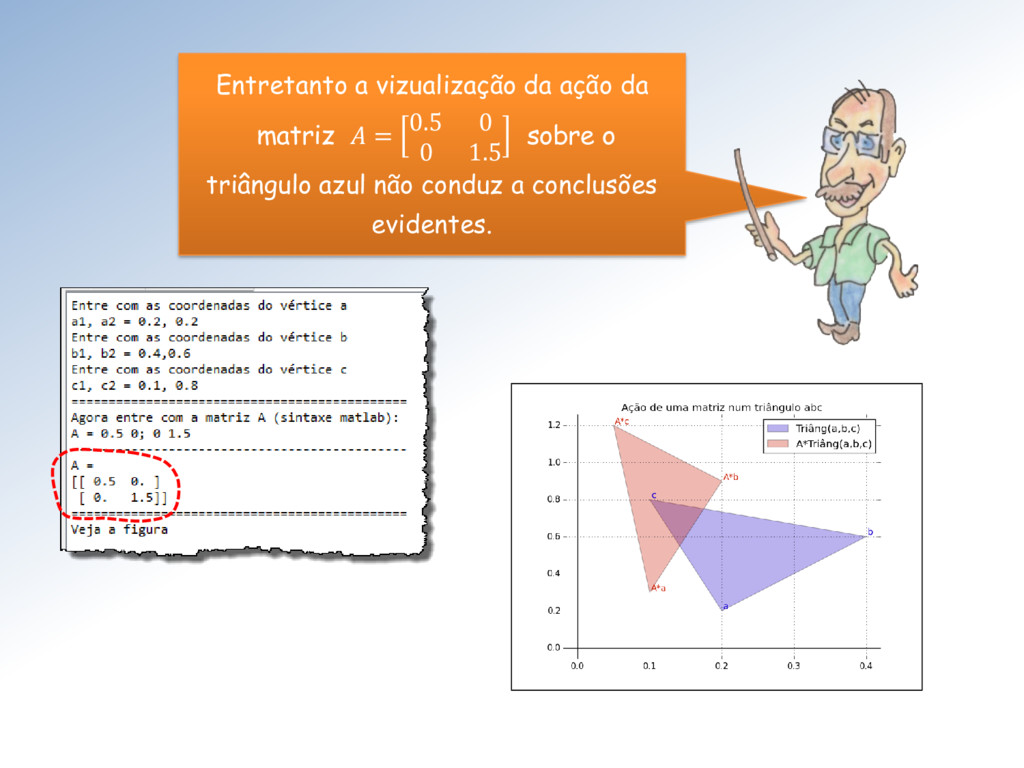
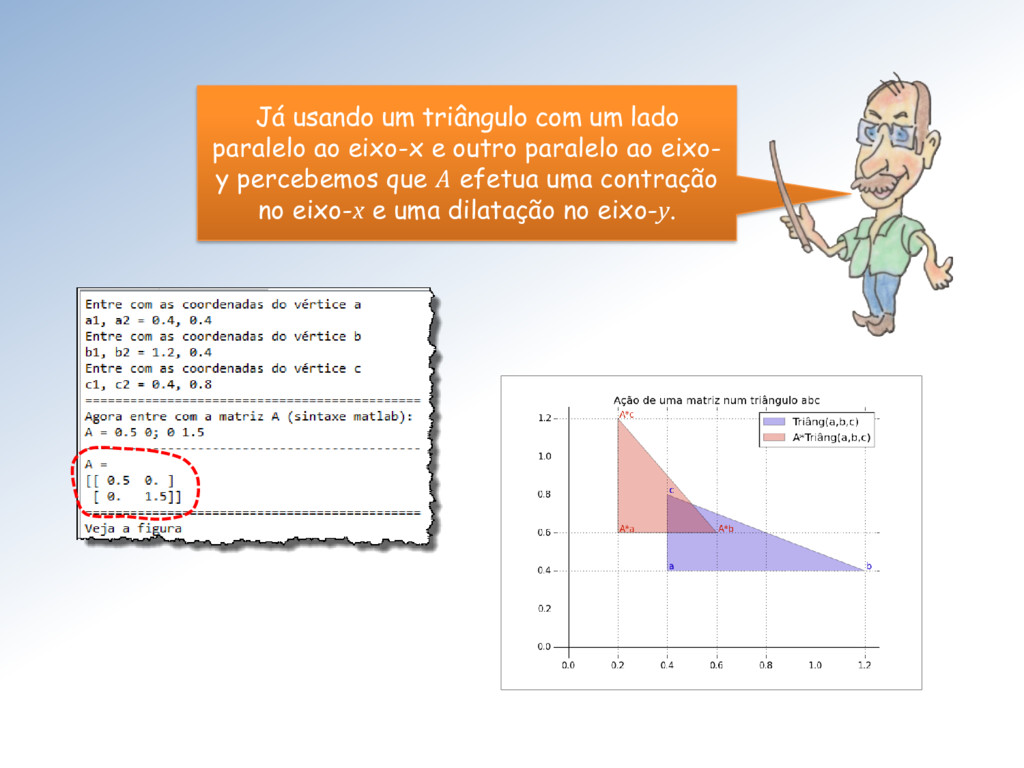
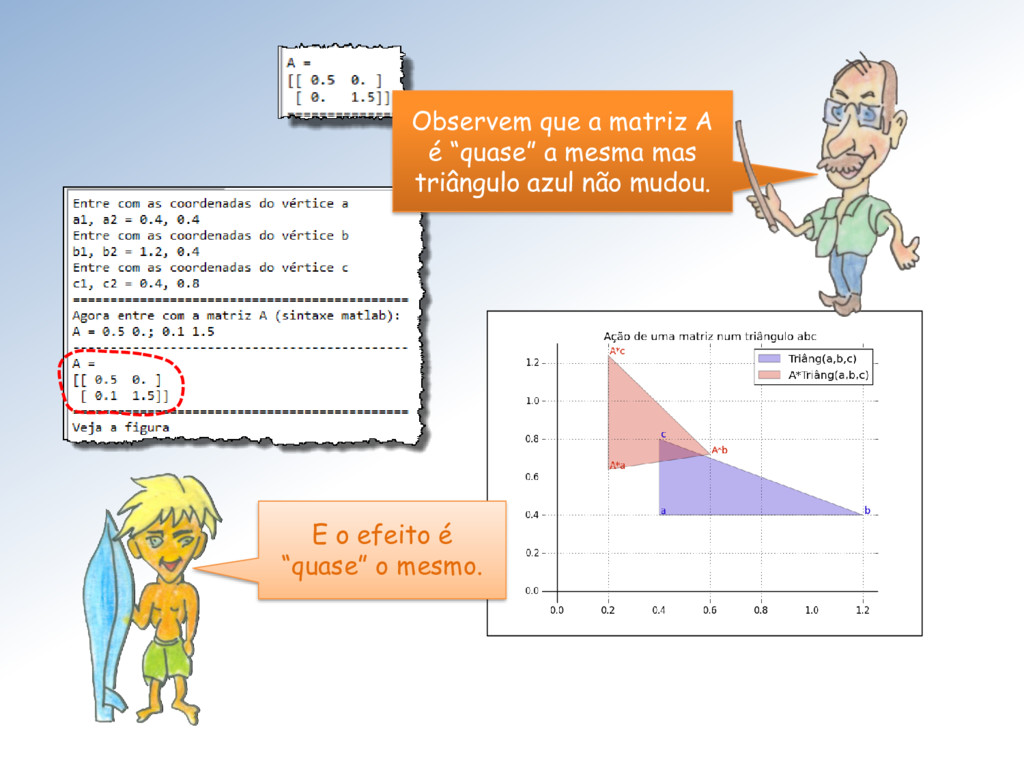
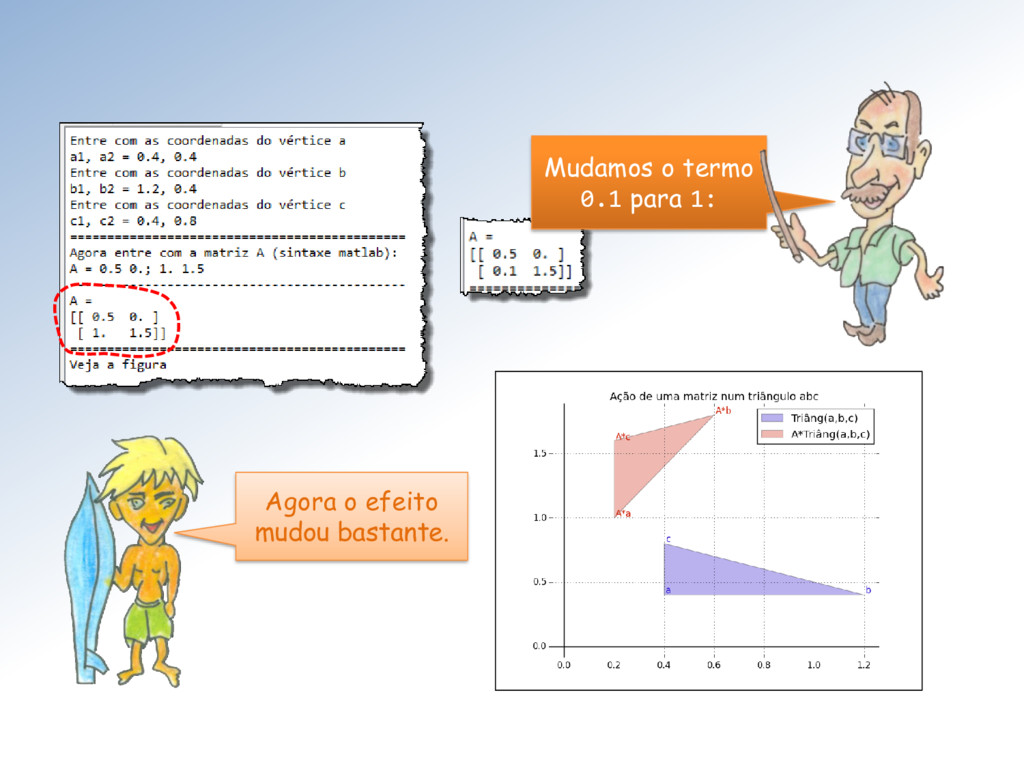
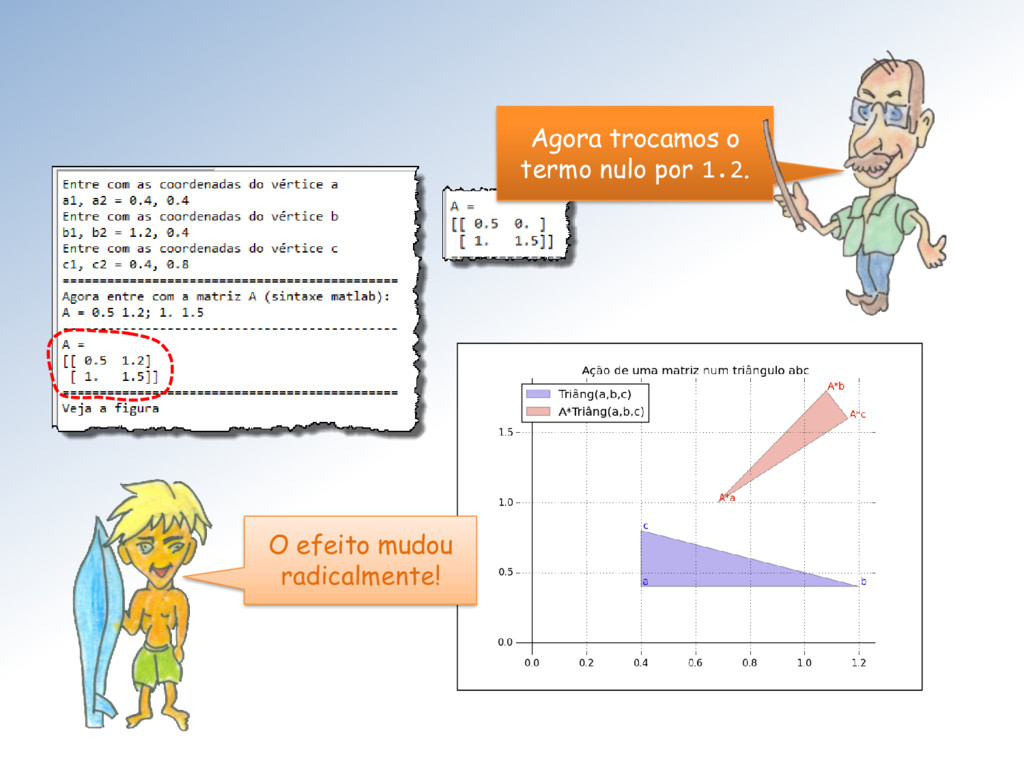
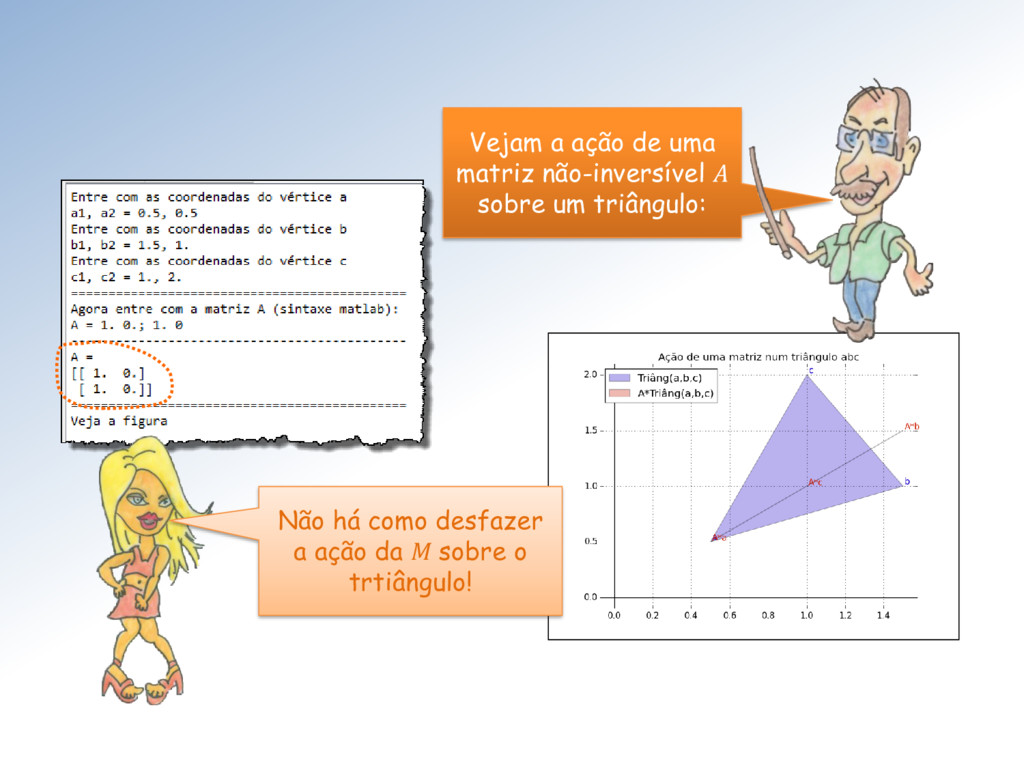
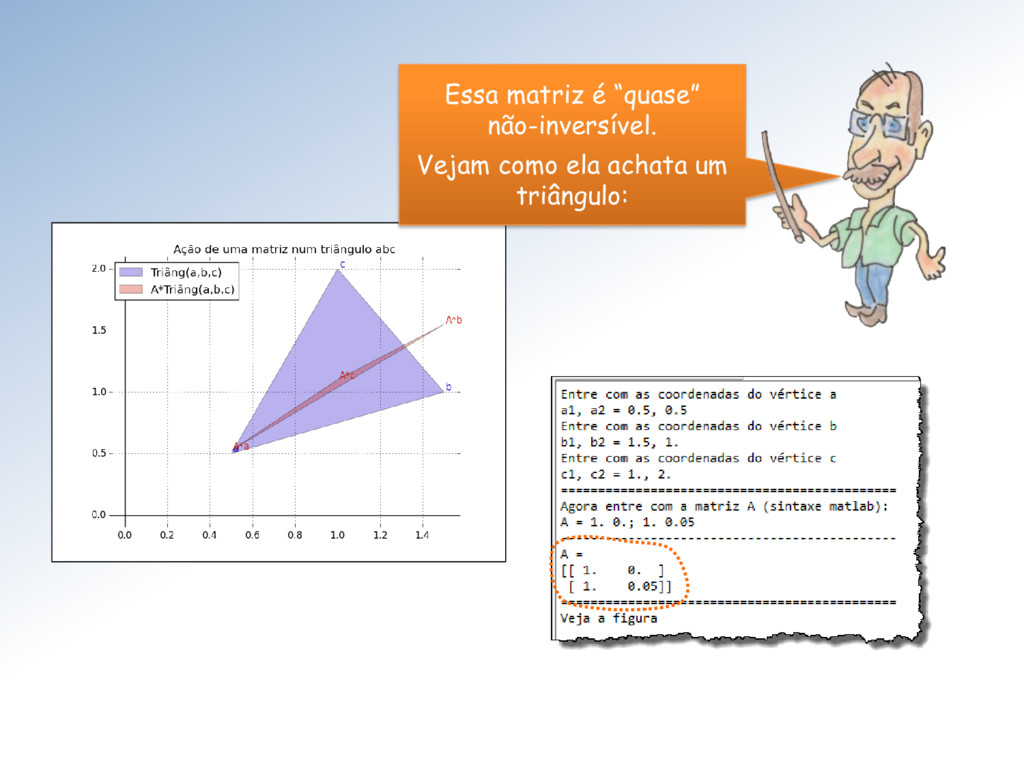
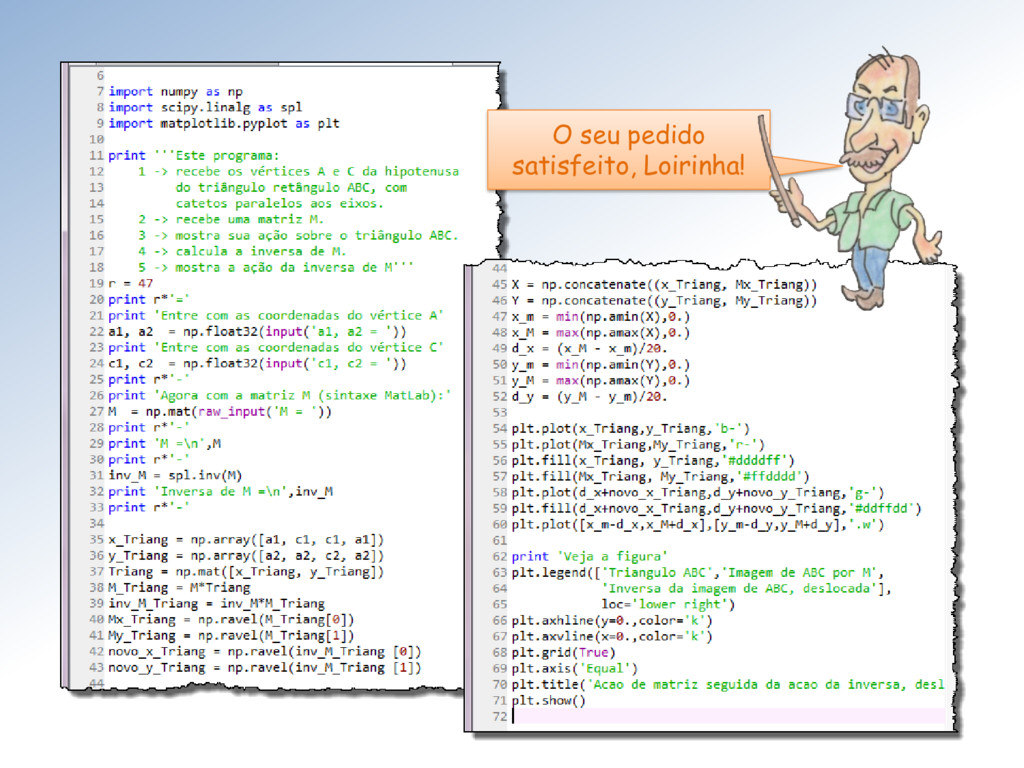
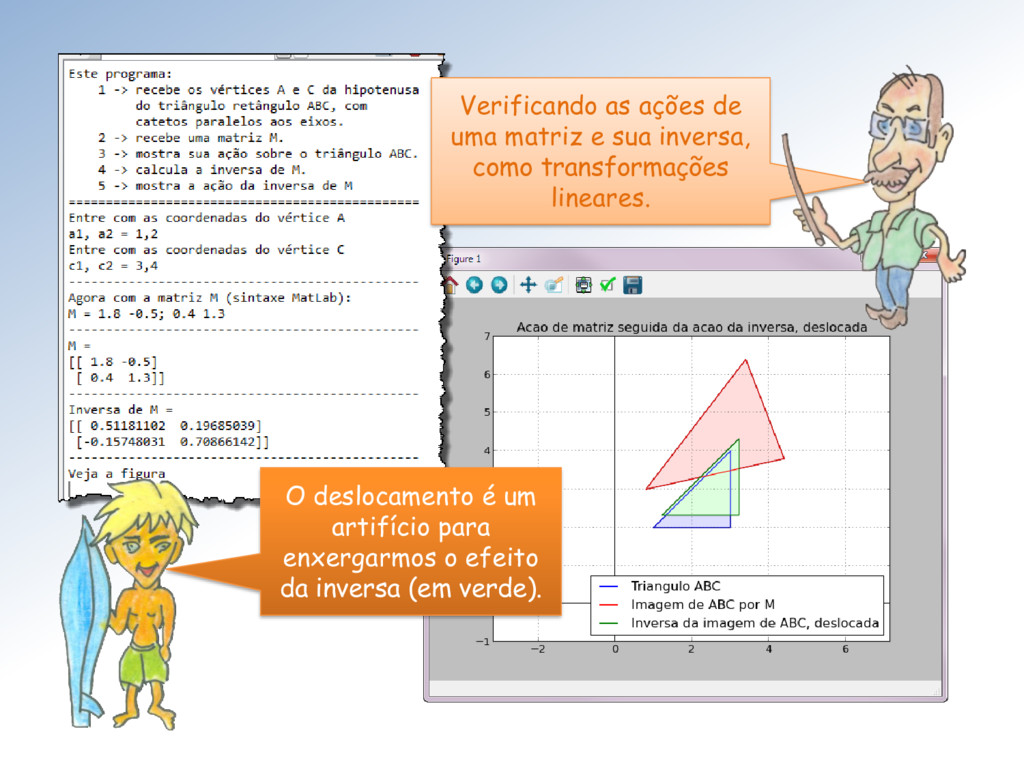
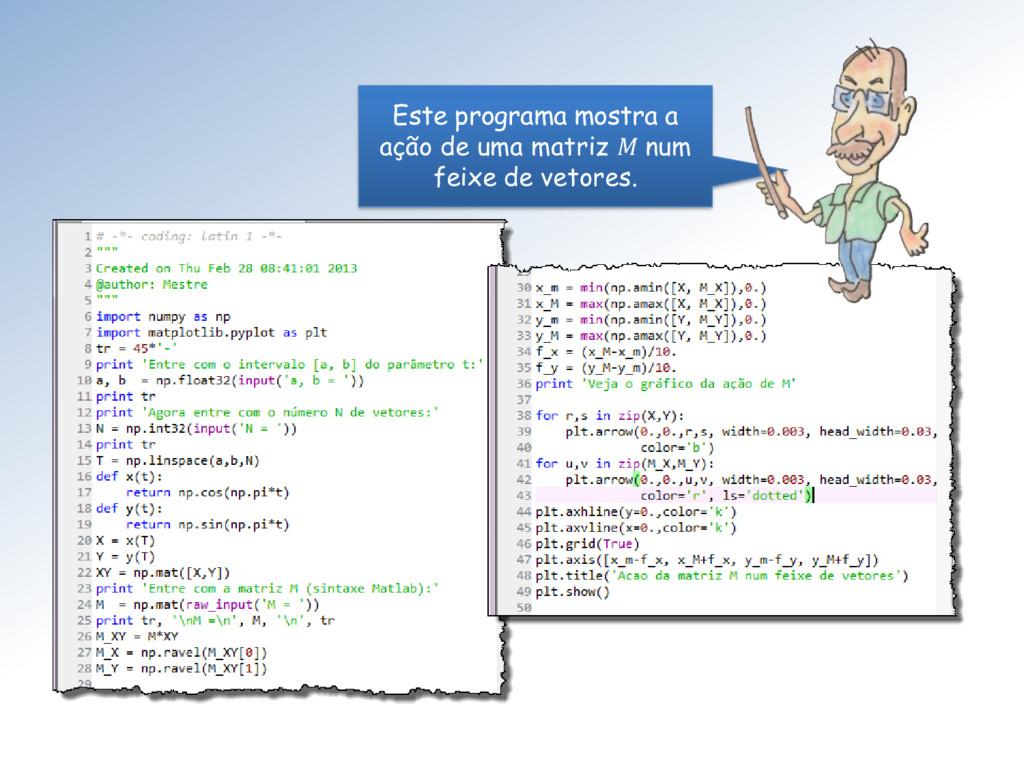
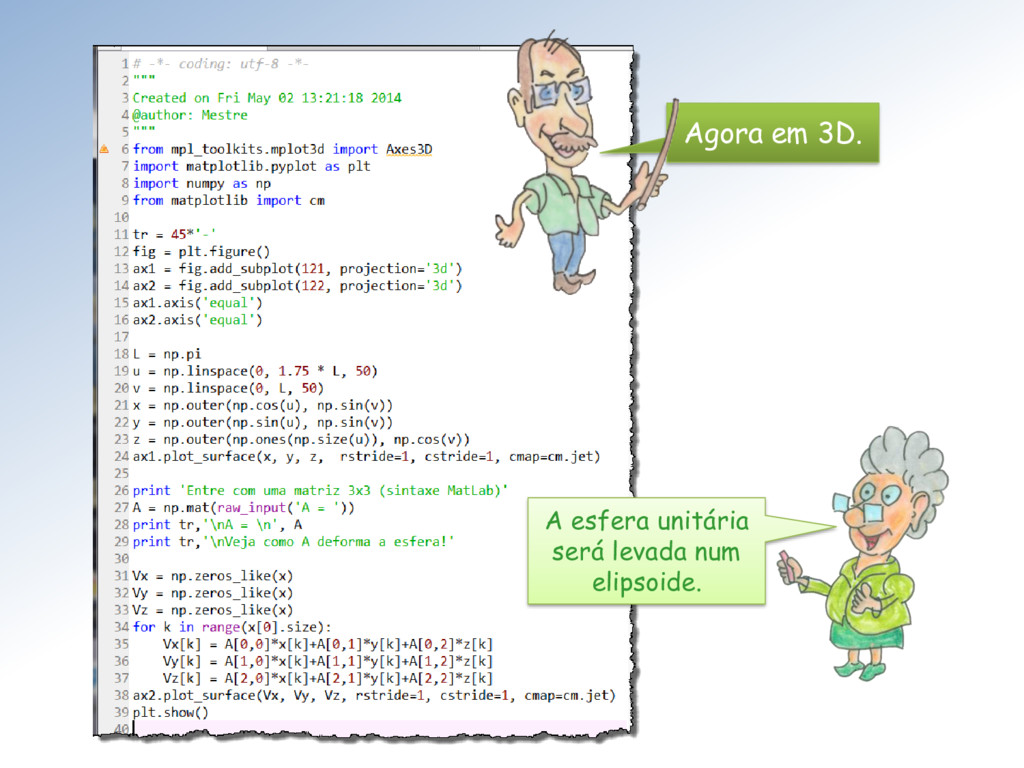
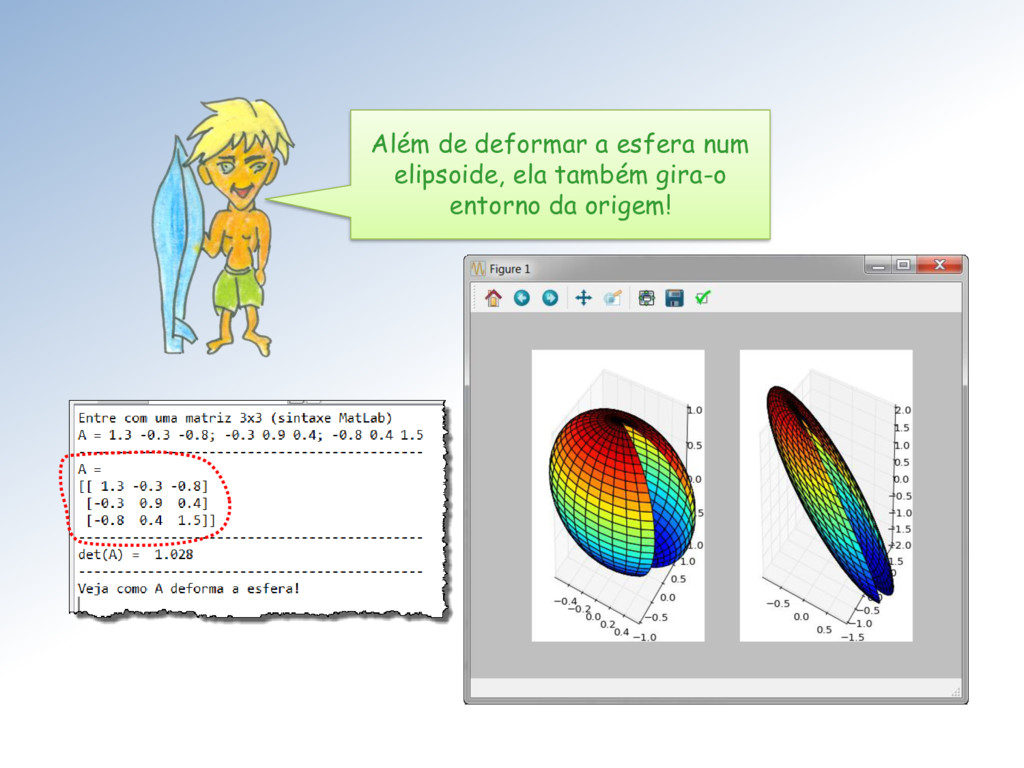
de uma matriz qualquer sobre um triângulo abc escolhido livremente. Mostraremos alguns exemplos com diferentes matrizes . Surfista, faça outros exemplos exploratórios.
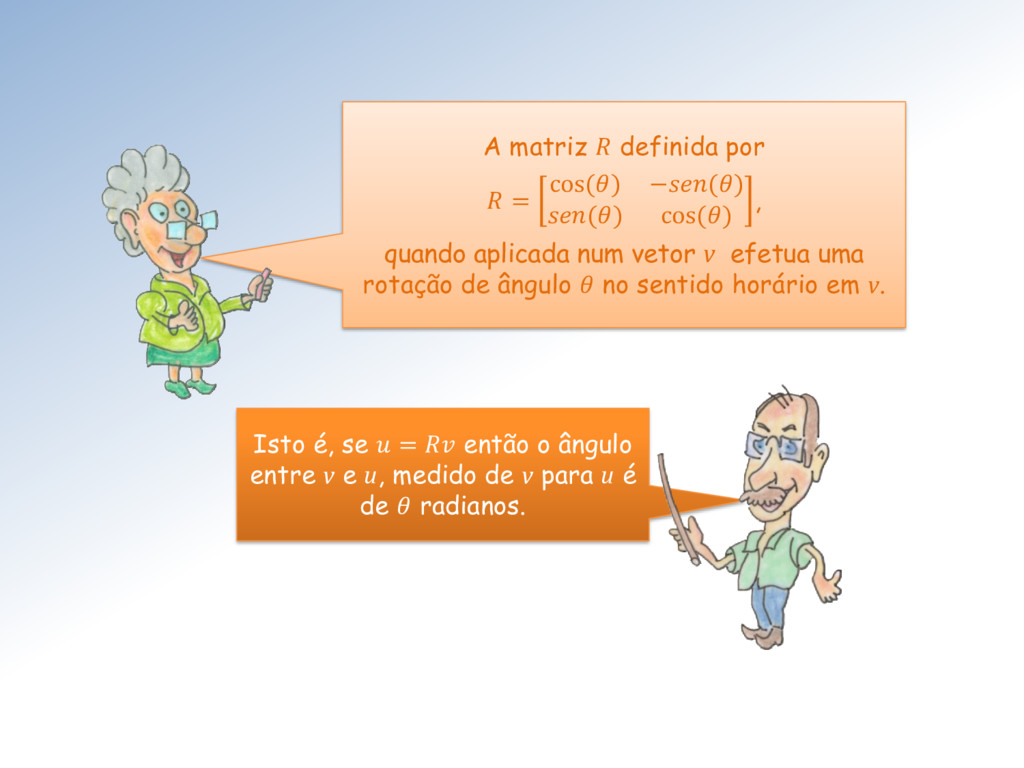
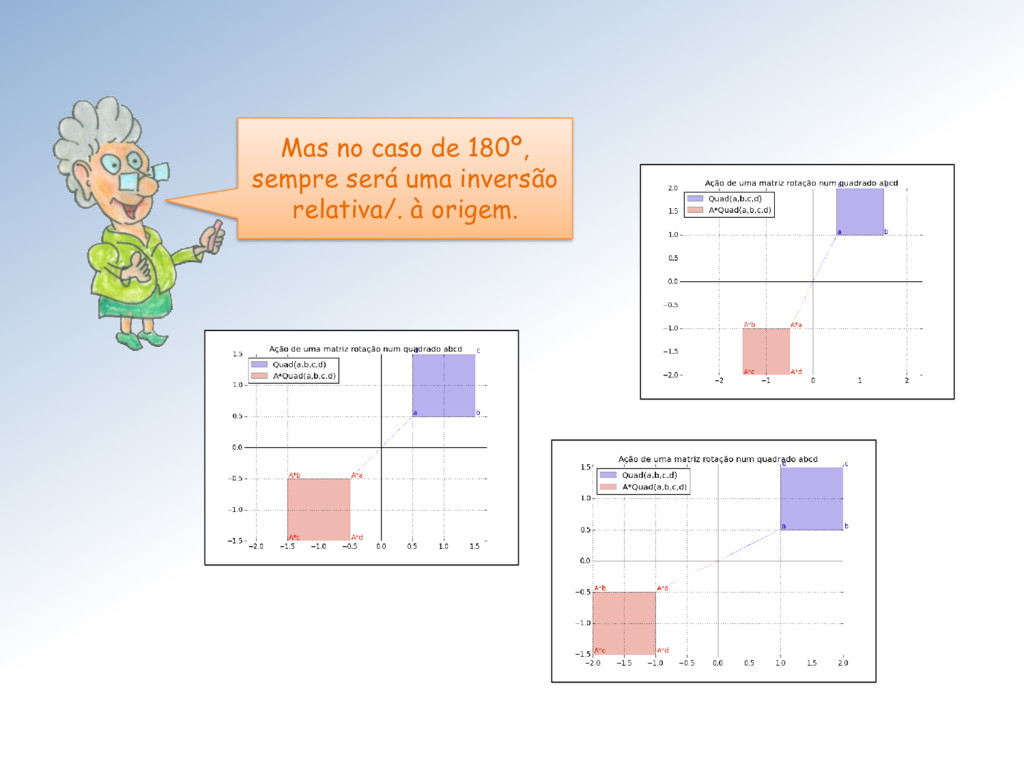
quando aplicada num vetor v efetua uma rotação de ângulo no sentido horário em v. Isto é, se = então o ângulo entre v e u, medido de v para u é de radianos.
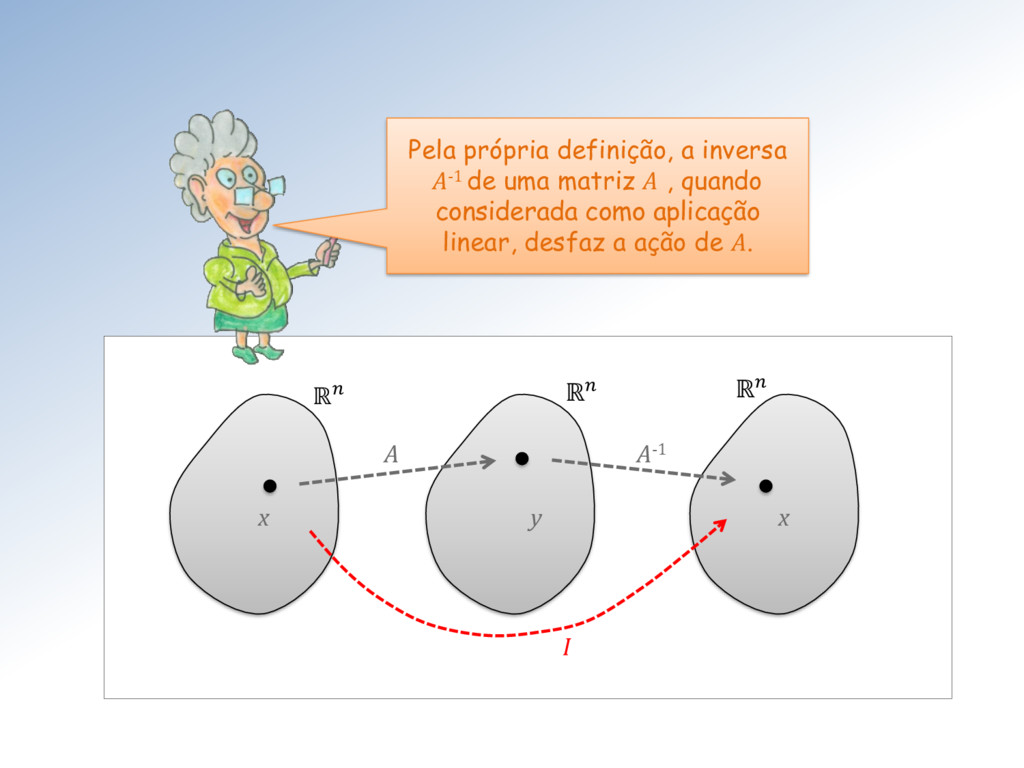
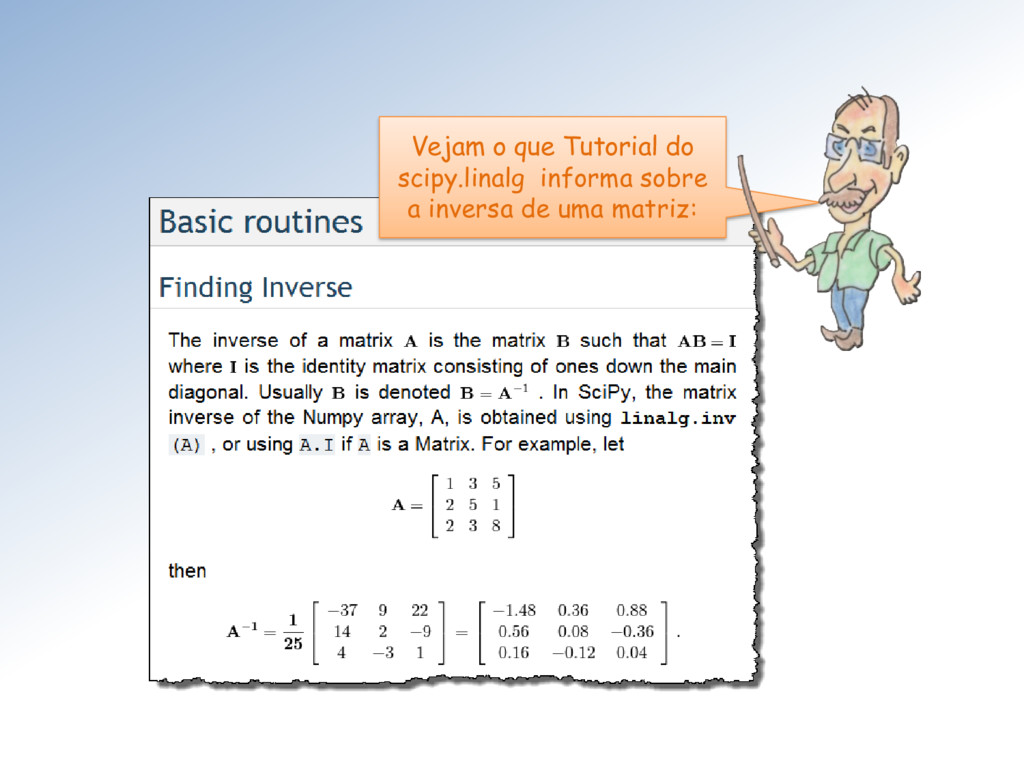
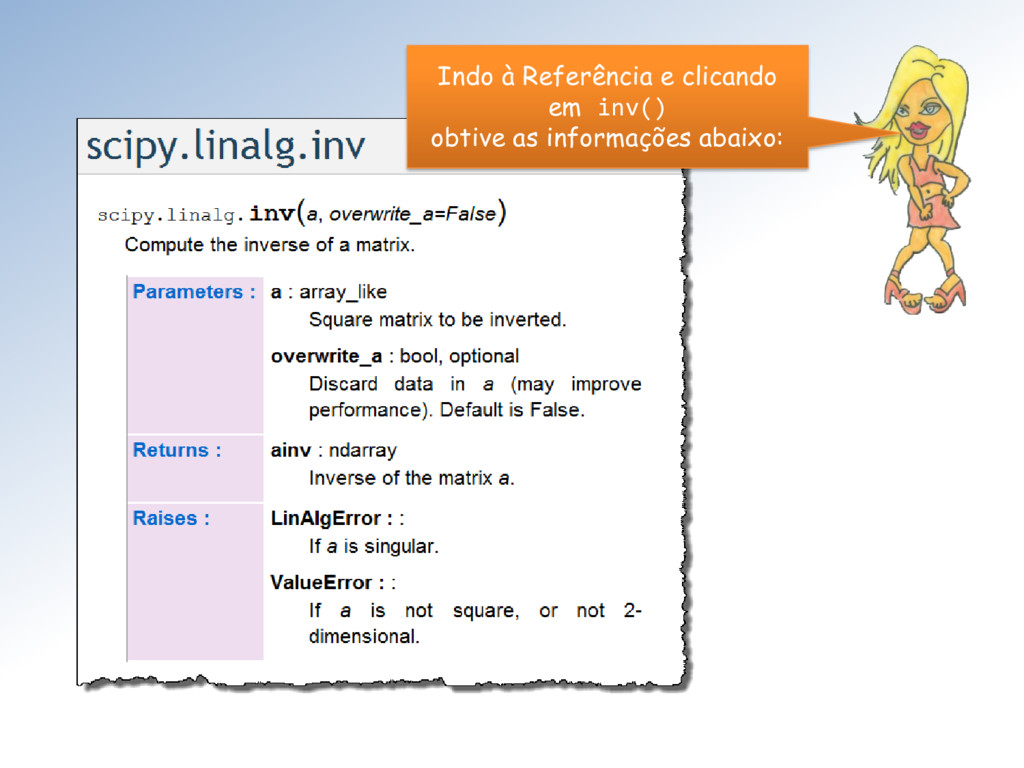
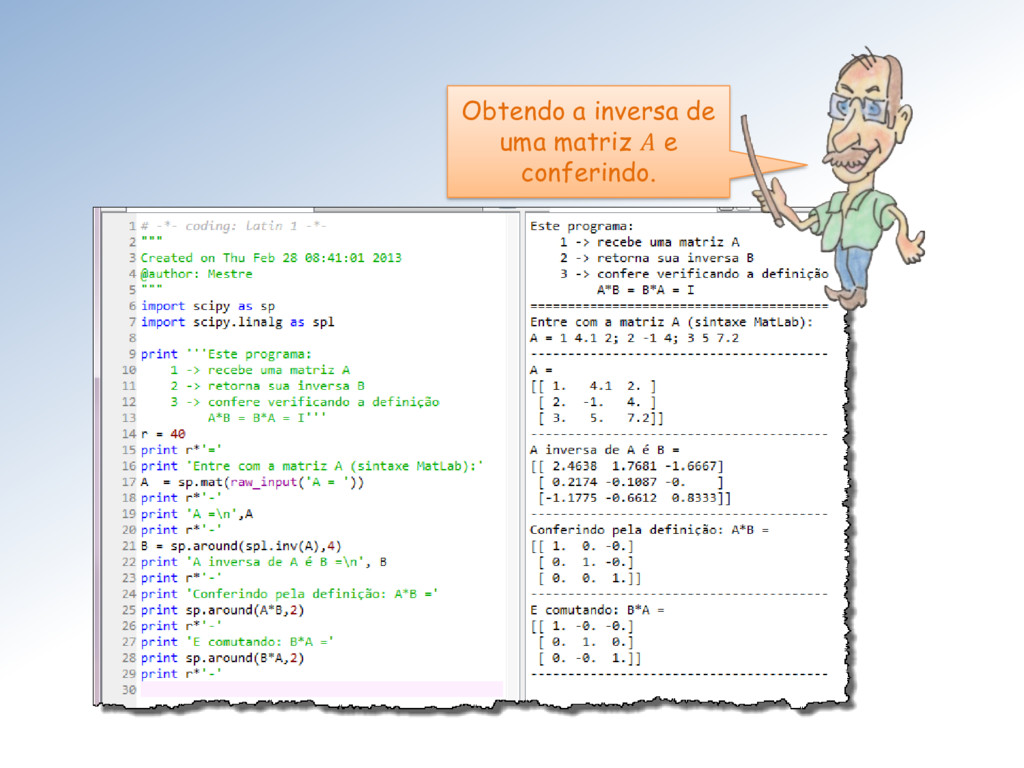
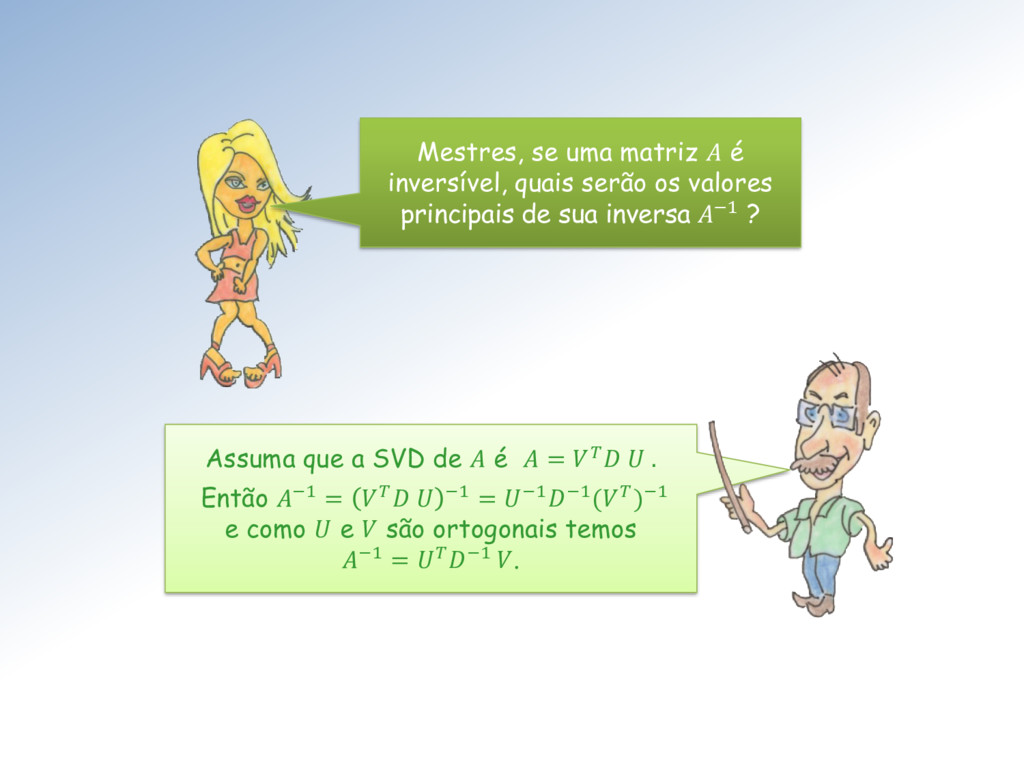
é uma matriz quadrada B de ordem n tal que ∙ = ∙ = Existem matrizes que não possuem inversa – são não-inversíveis. Uma matriz não possui mais que uma inversa. Além disso, a inversa da inversa é a própria!
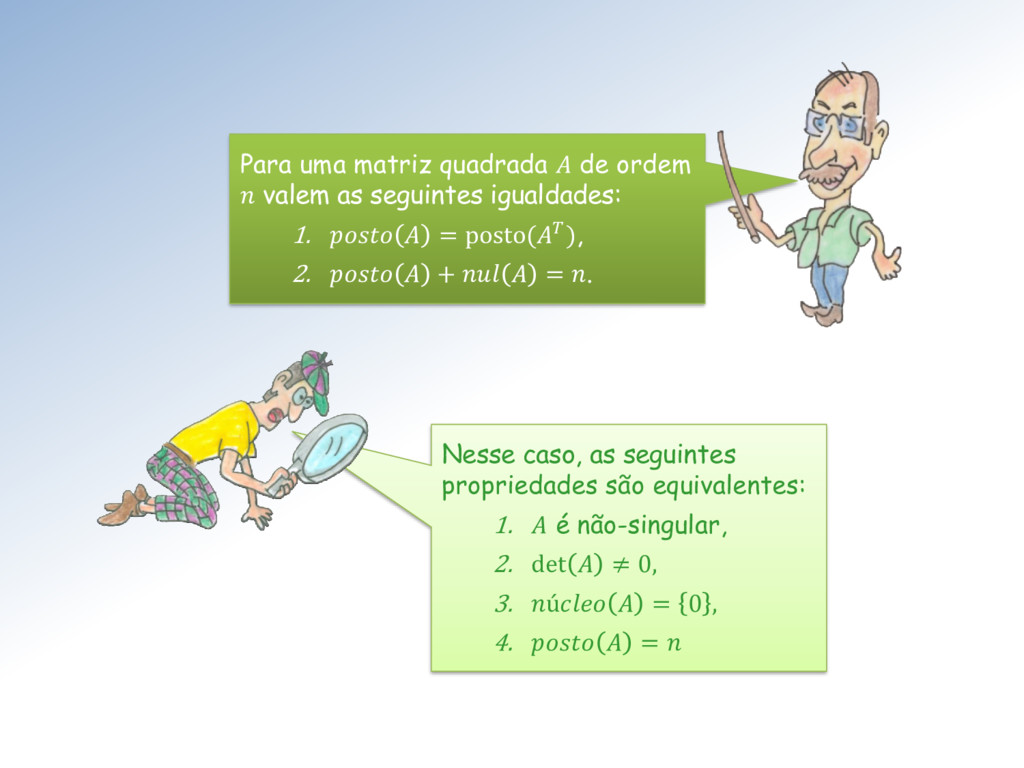
não-singular, i.é, det() ≠ 0 Entretanto, verificar se det() ≠ 0 para saber se A é inversível é uma técnica nunca utilizada em Álgebra linear computacional.
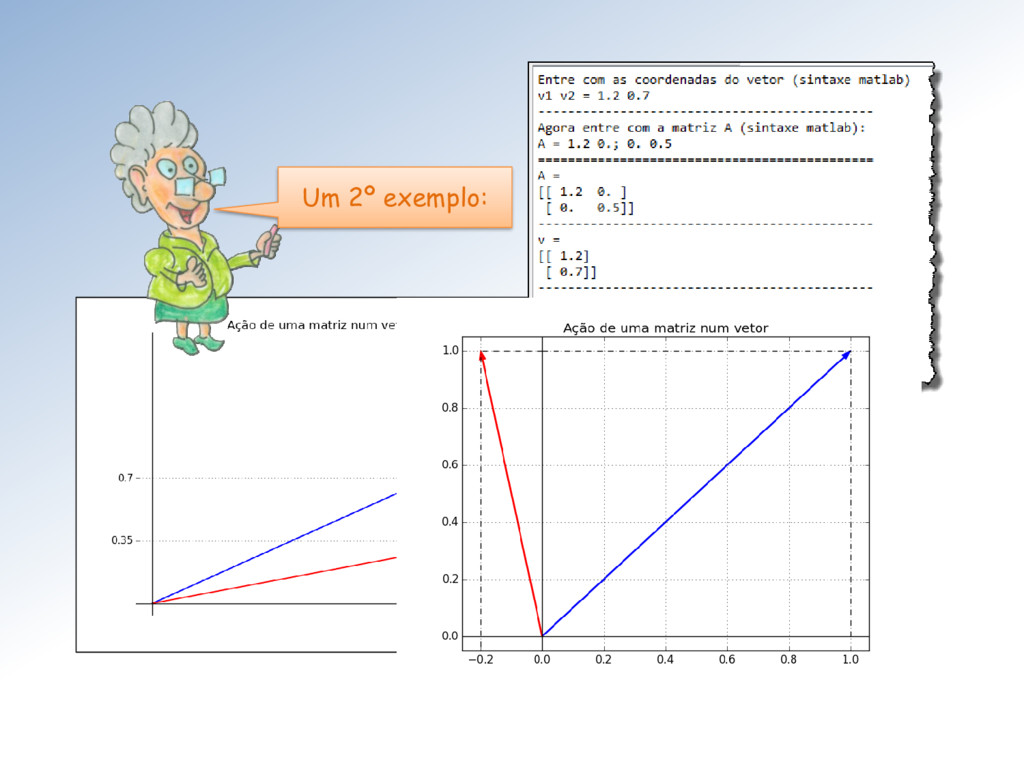
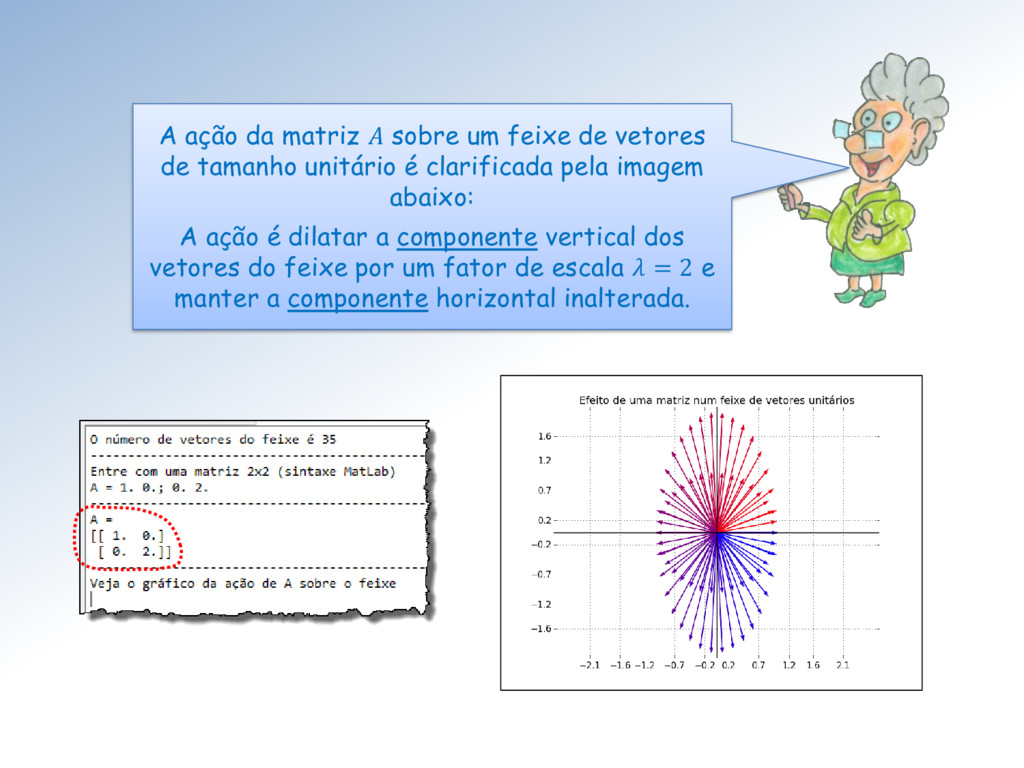
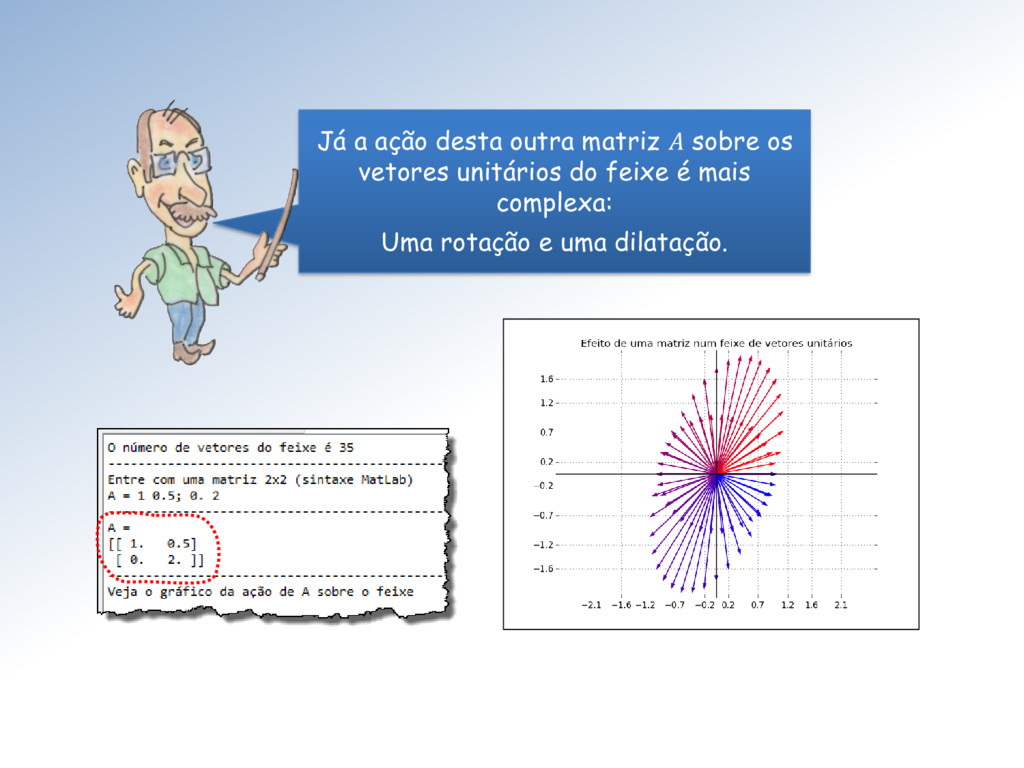
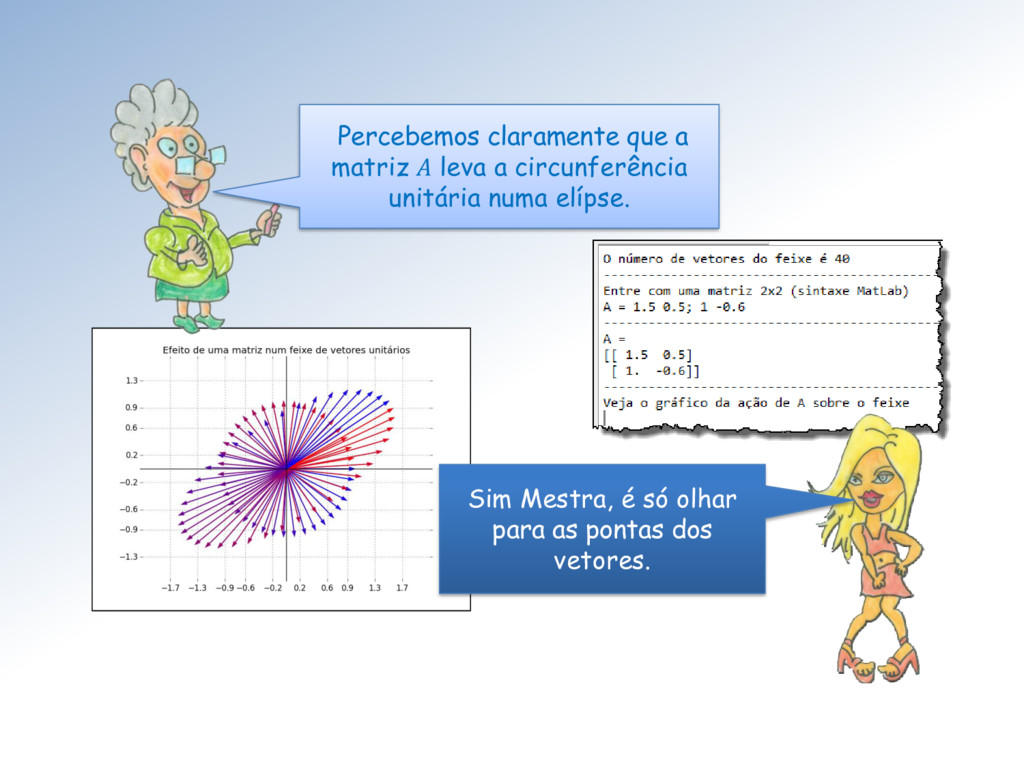
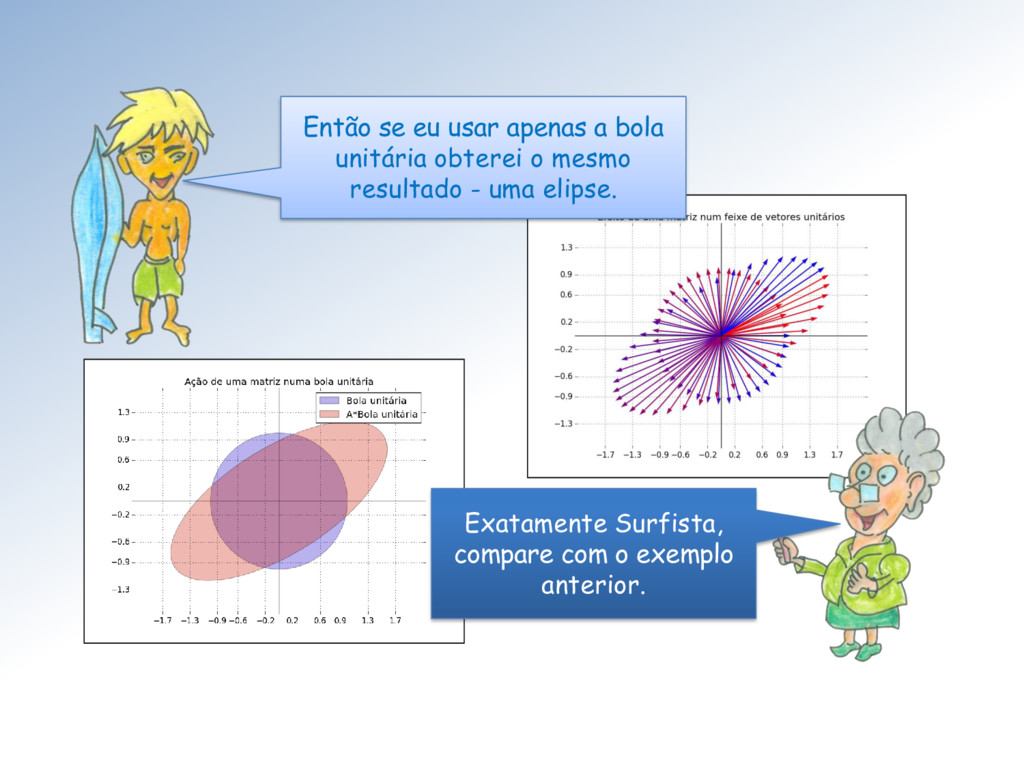
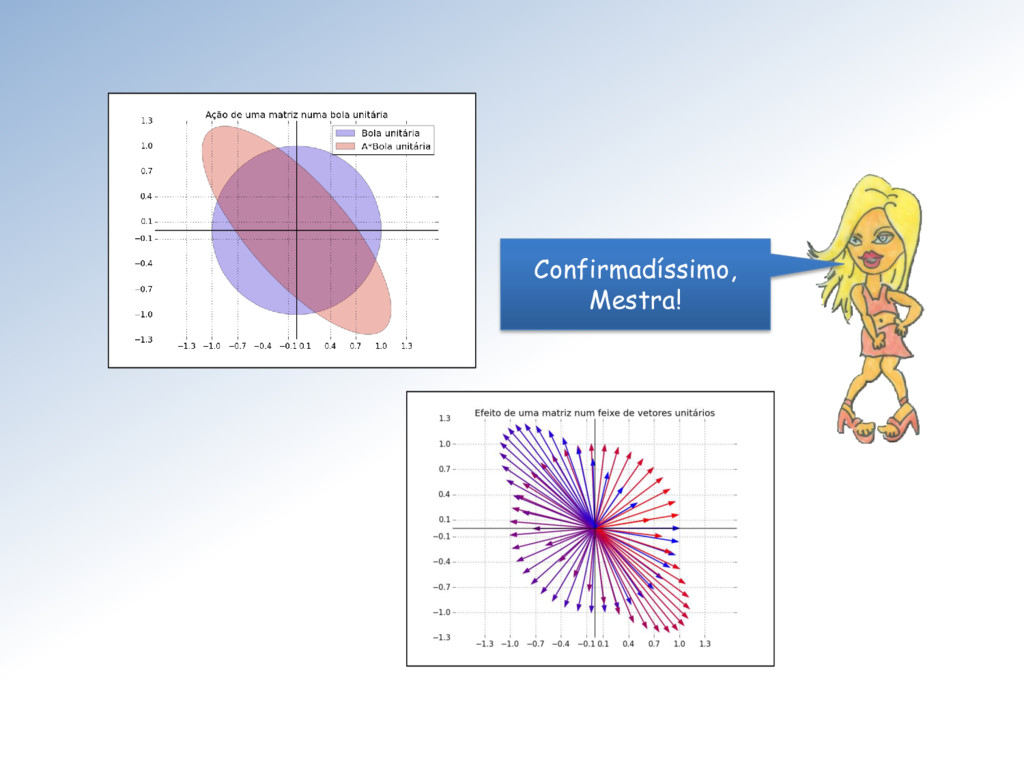
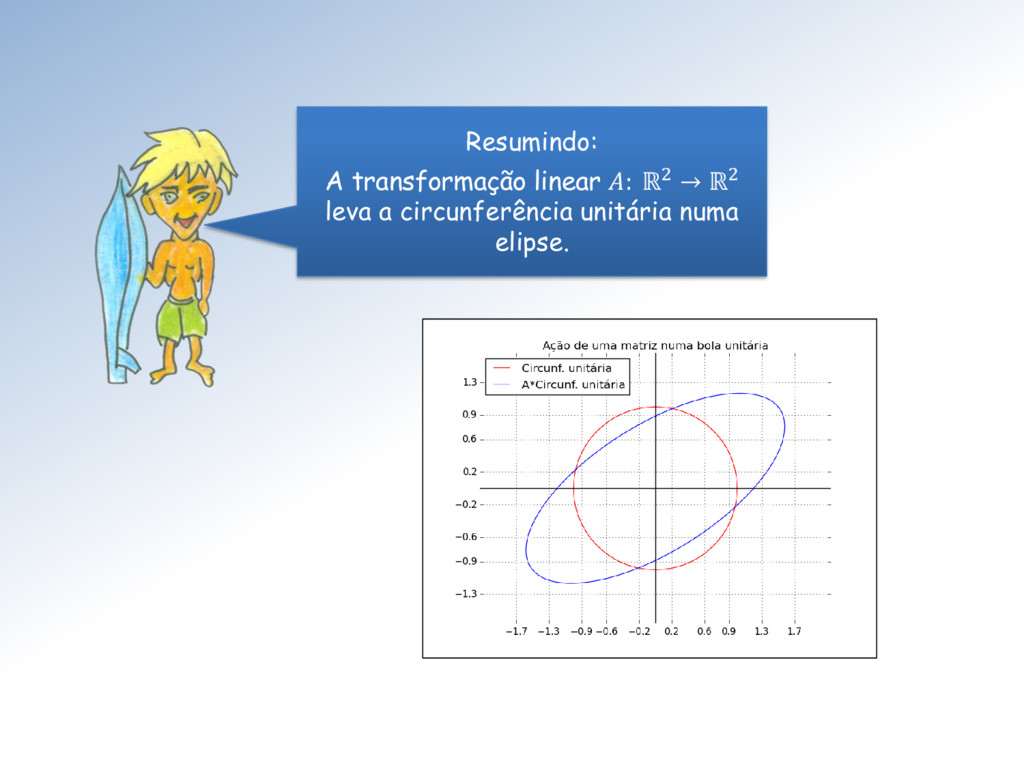
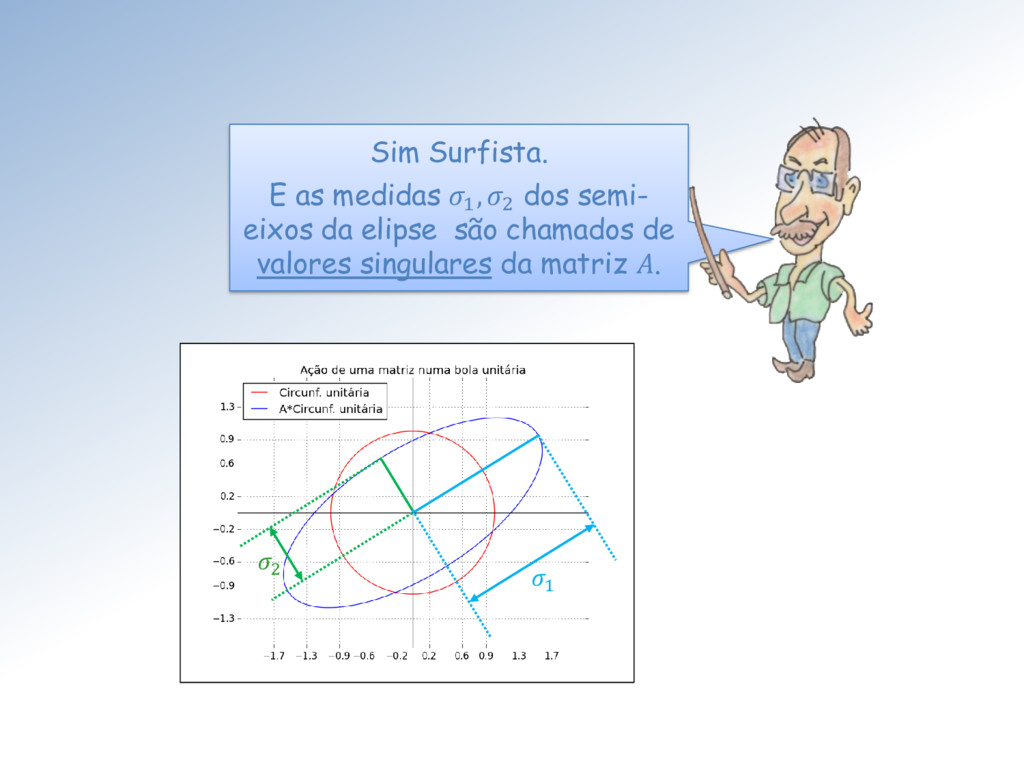
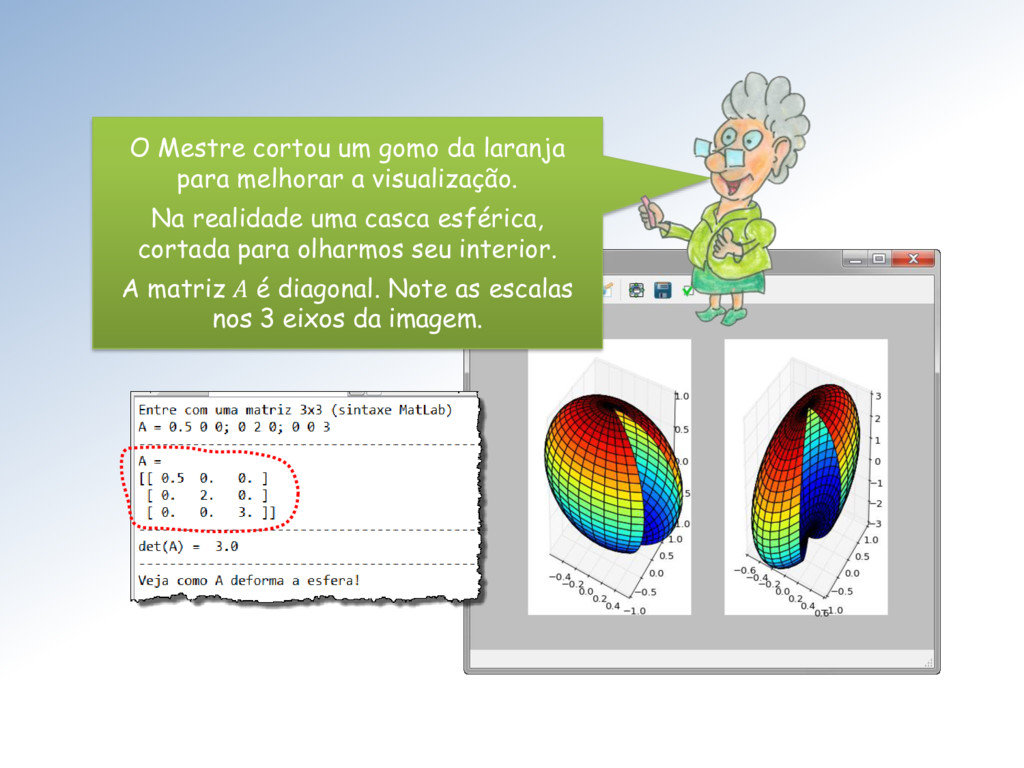
tamanho unitário é clarificada pela imagem abaixo: A ação é dilatar a componente vertical dos vetores do feixe por um fator de escala = 2 e manter a componente horizontal inalterada.
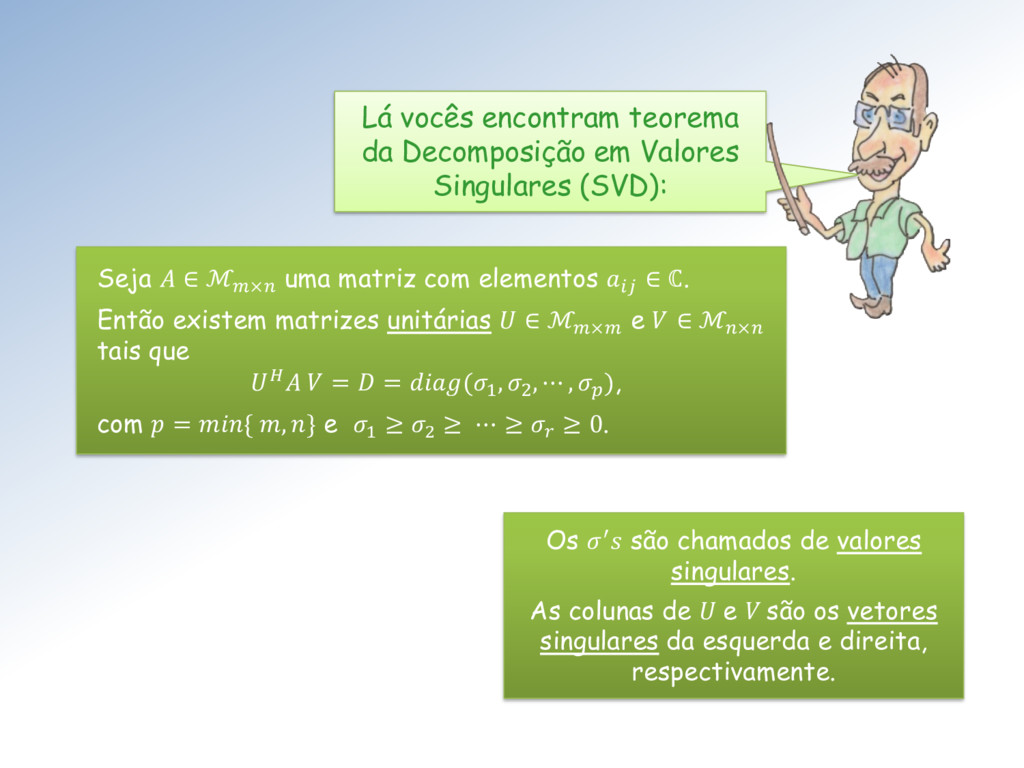
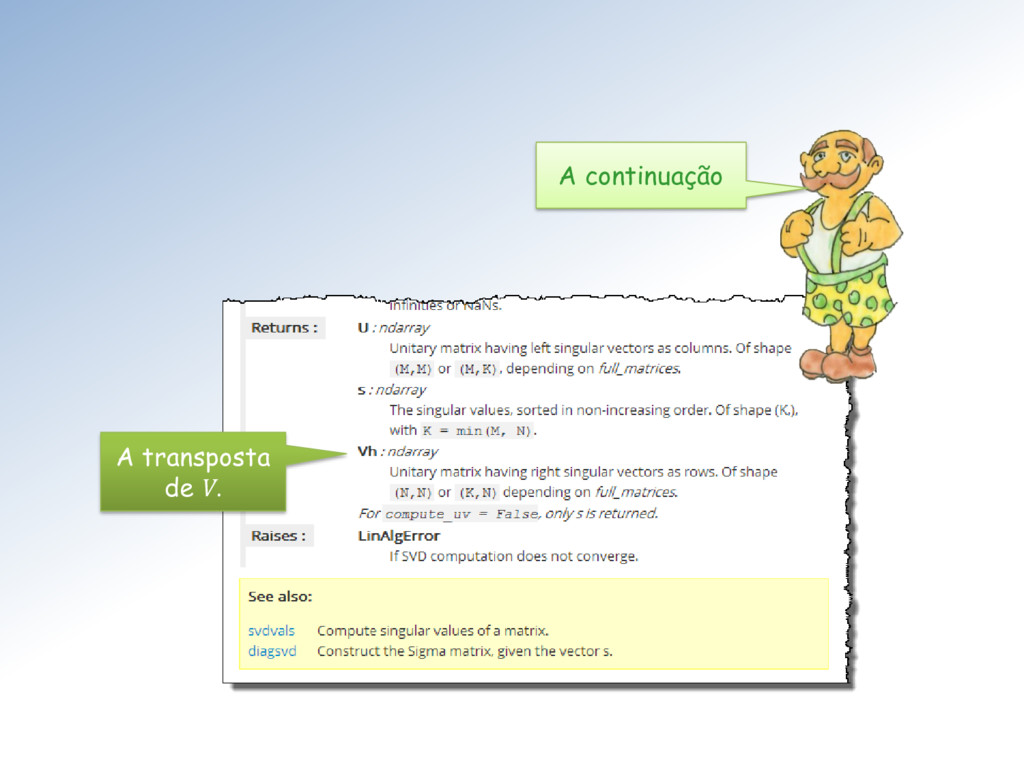
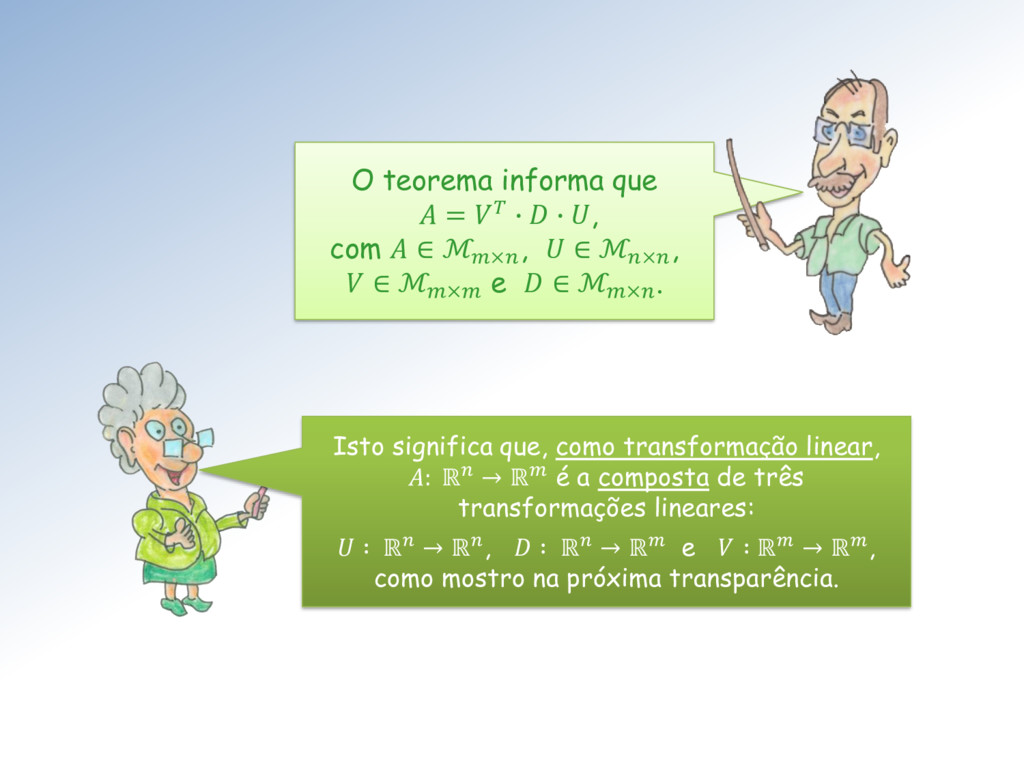
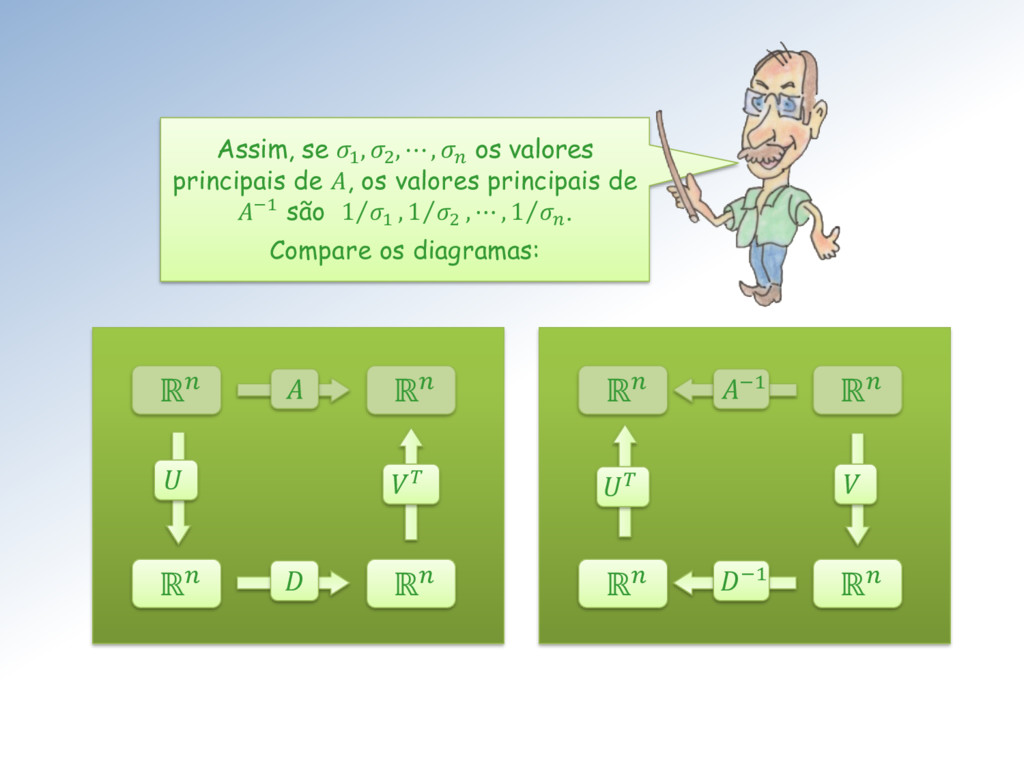
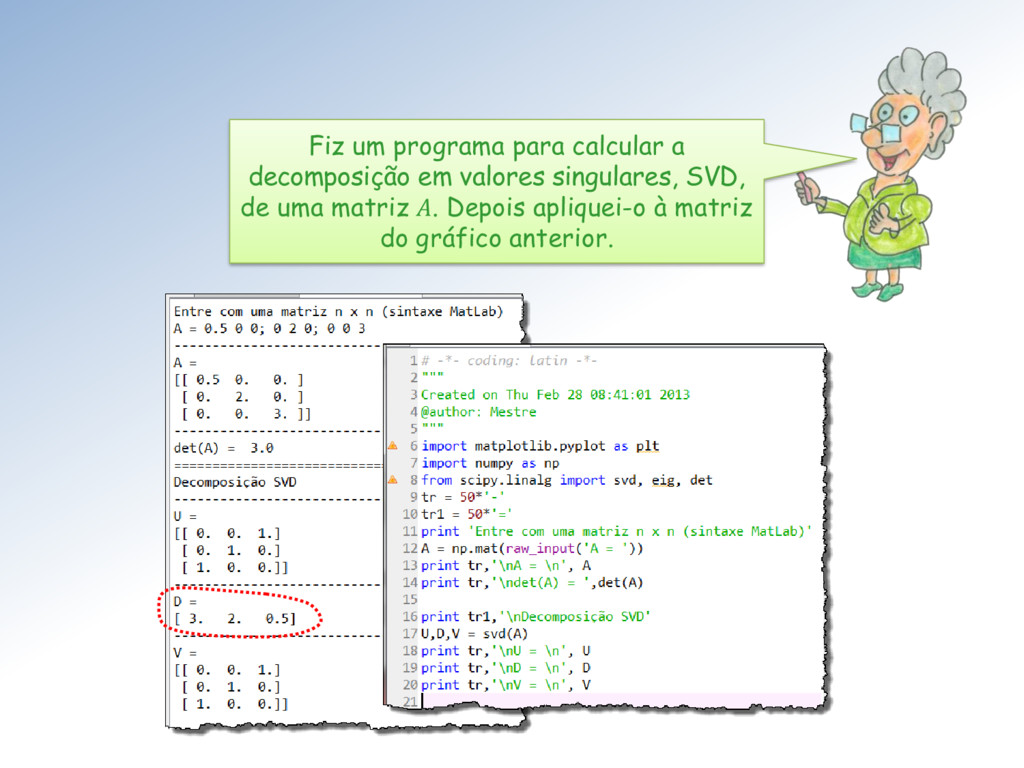
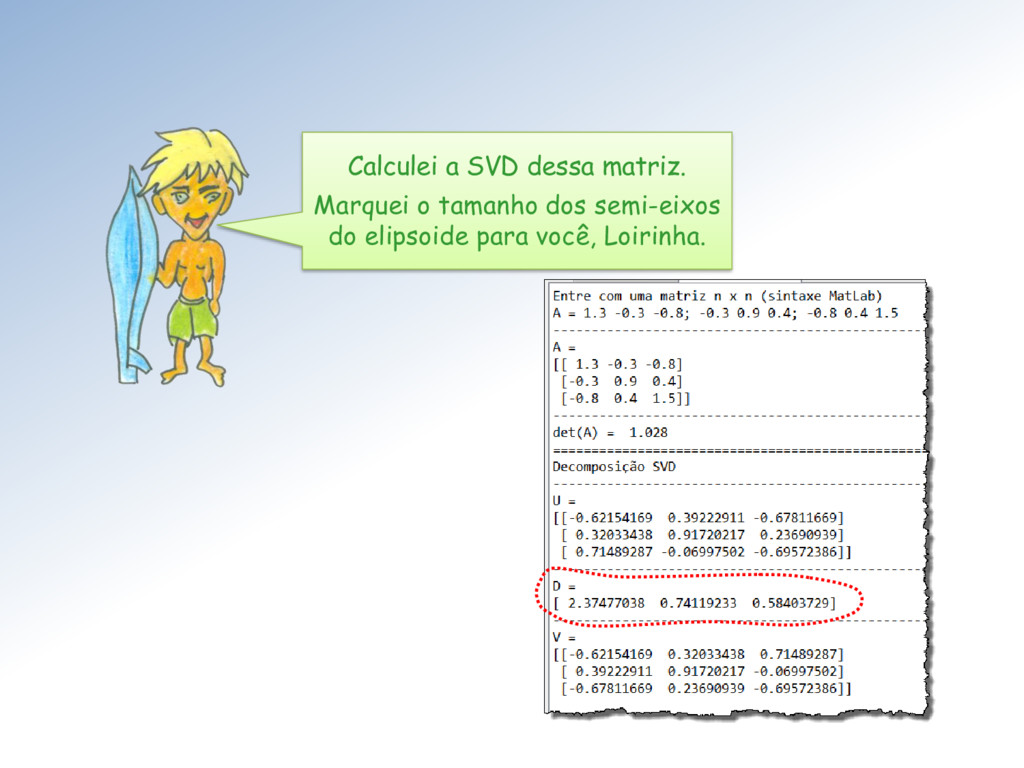
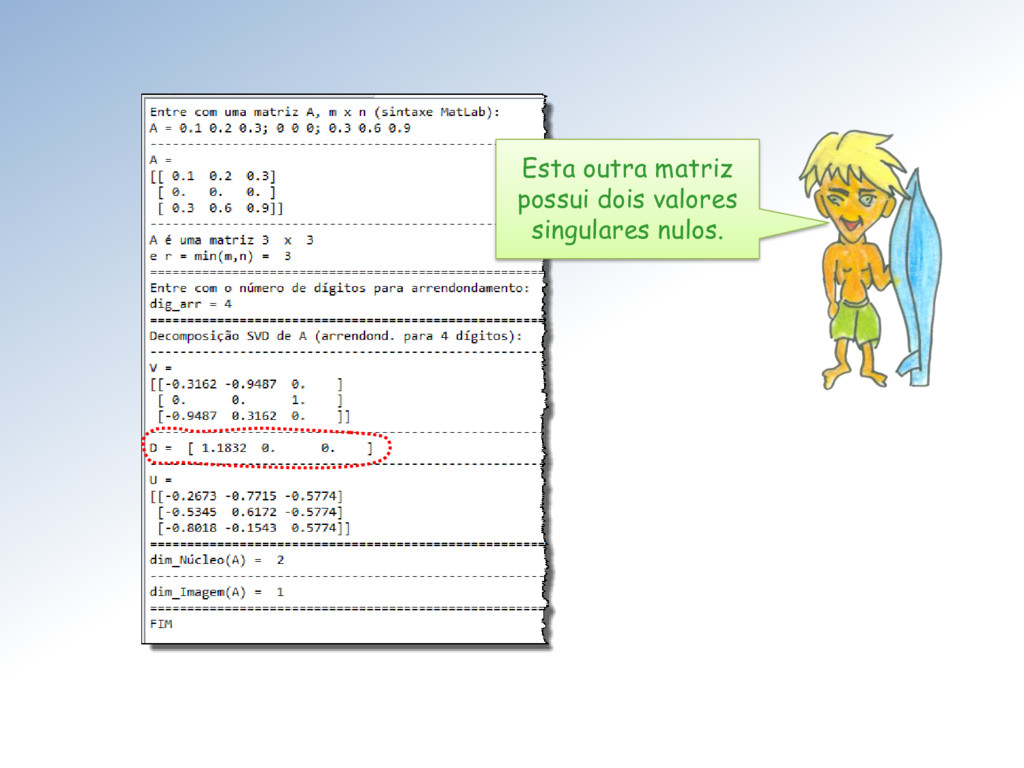
Seja ∈ ℳ× uma matriz com elementos ∈ ℂ. Então existem matrizes unitárias ∈ ℳ× e ∈ ℳ× tais que = = (1 , 2 , ⋯ , ), com = { , } e 1 ≥ 2 ≥ ⋯ ≥ ≥ 0. Os ′ são chamados de valores singulares. As colunas de U e V são os vetores singulares da esquerda e direita, respectivamente.
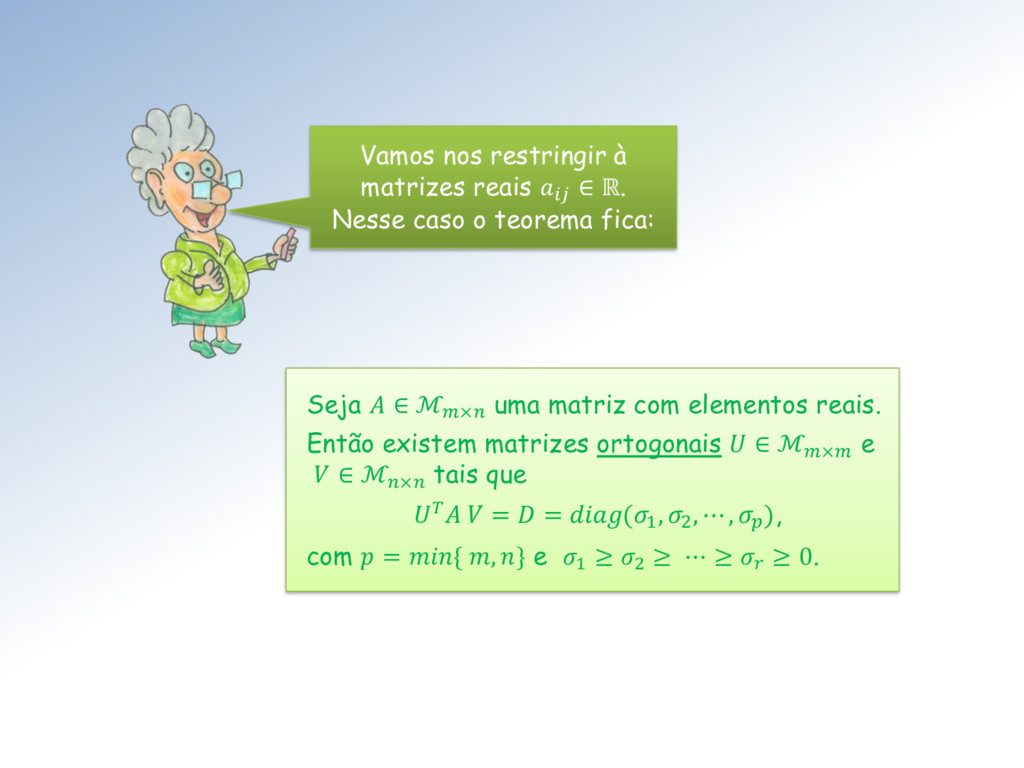
matrizes ortogonais ∈ ℳ× e ∈ ℳ× tais que = = (1 , 2 , ⋯ , ), com = { , } e 1 ≥ 2 ≥ ⋯ ≥ ≥ 0. Vamos nos restringir à matrizes reais ∈ ℝ. Nesse caso o teorema fica:
4 , que constituem as colunas da matriz e os vetores 1 , 2 , 3 , 4 que constituem as linhas da matriz são ortonormais. Sim Galileu, uma vez que: • ∙ = , • ∙ = .
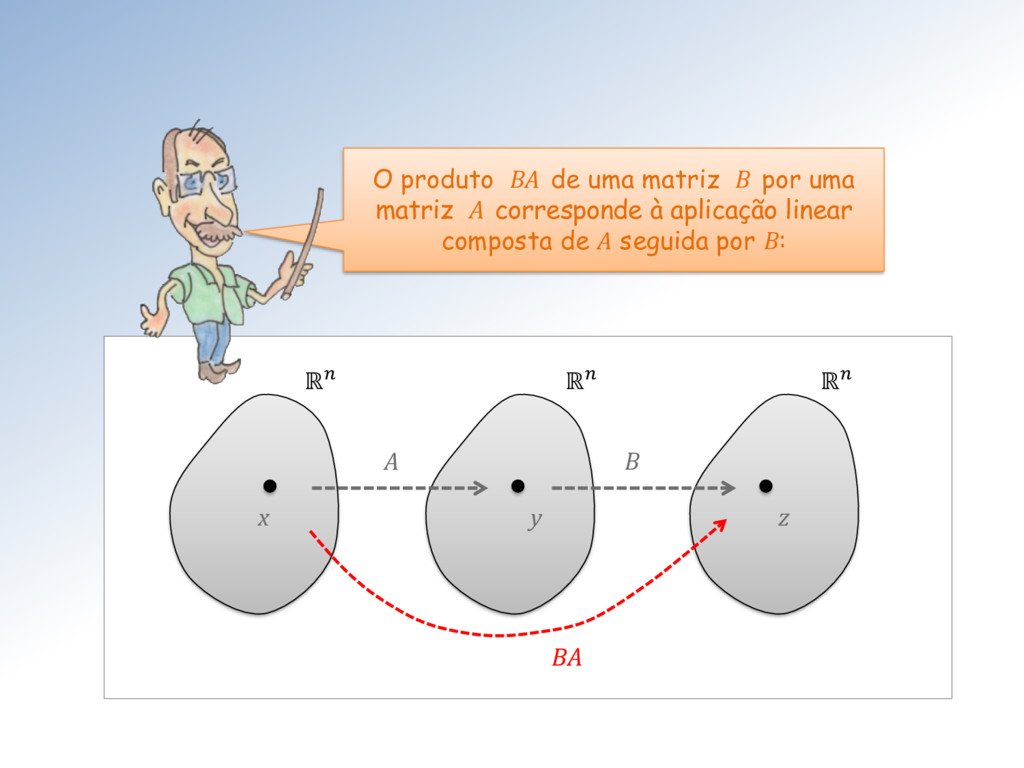
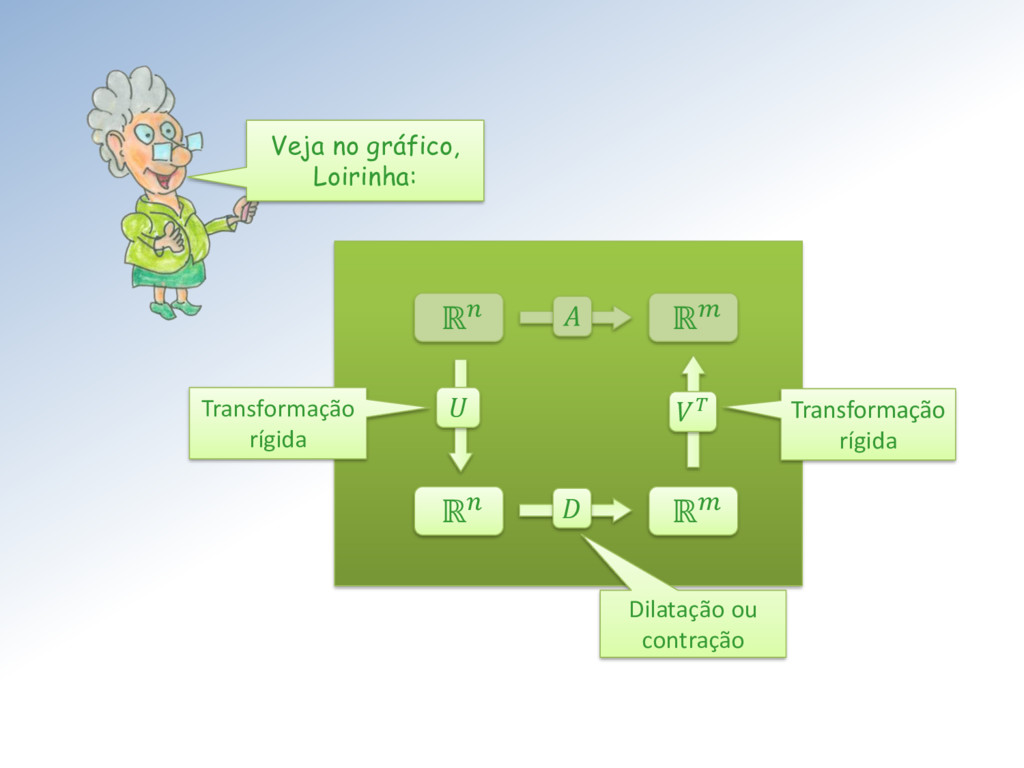
ℳ× , ∈ ℳ× , ∈ ℳ× e ∈ ℳ× . Isto significa que, como transformação linear, : ℝ → ℝ é a composta de três transformações lineares: ∶ ℝ → ℝ, ∶ ℝ → ℝ e ∶ ℝ → ℝ, como mostro na próxima transparência.
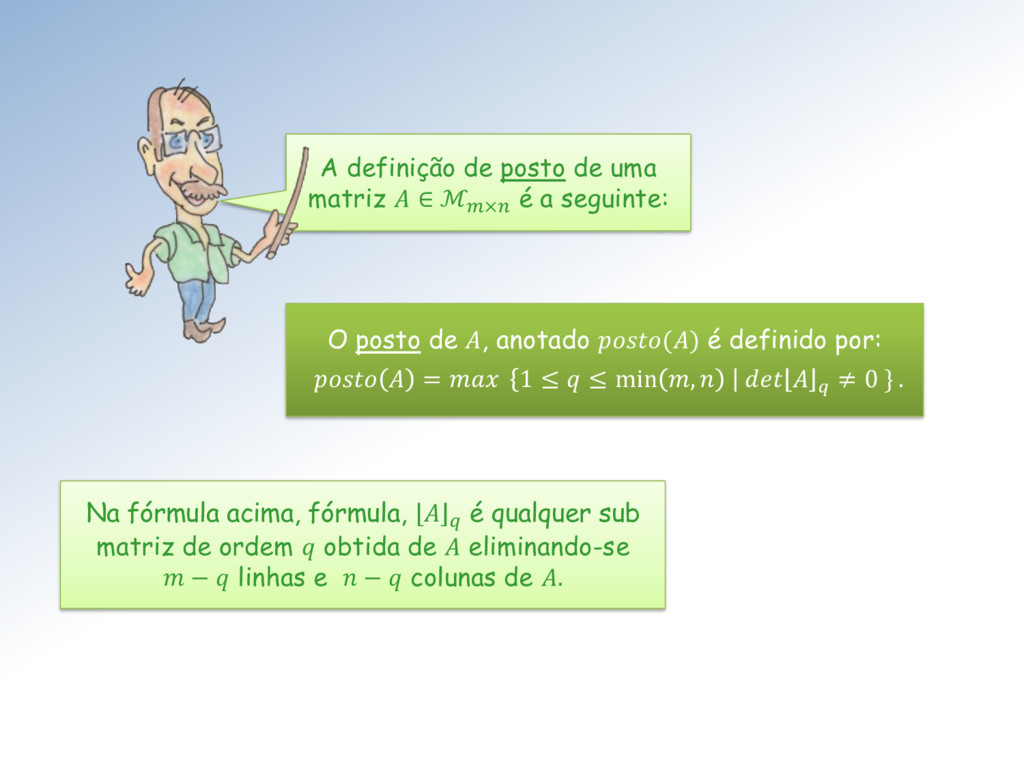
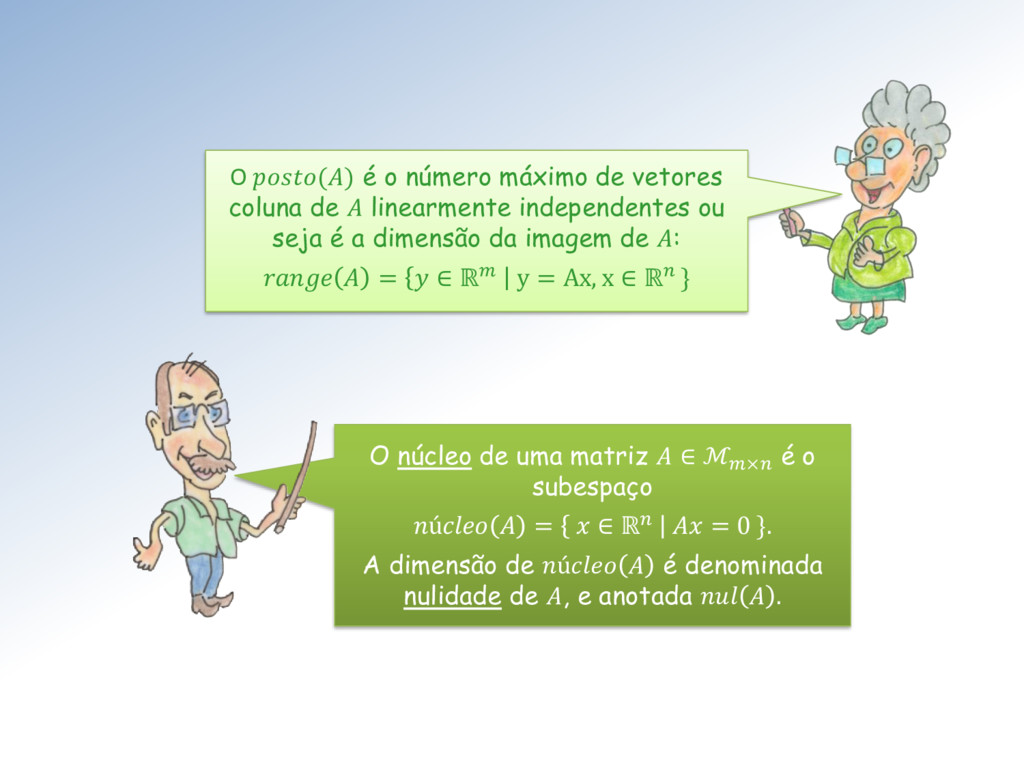
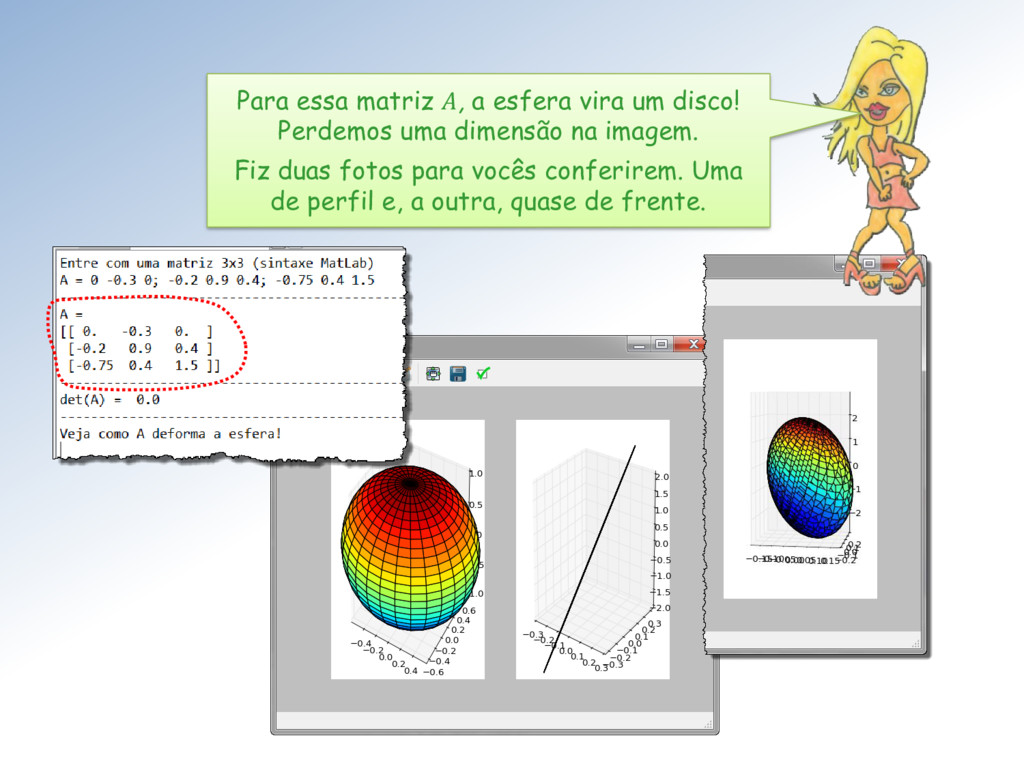
obtida de eliminando-se − linhas e − colunas de . O posto de , anotado () é definido por: = 1 ≤ ≤ min , ≠ 0 } . A definição de posto de uma matriz ∈ ℳ× é a seguinte:
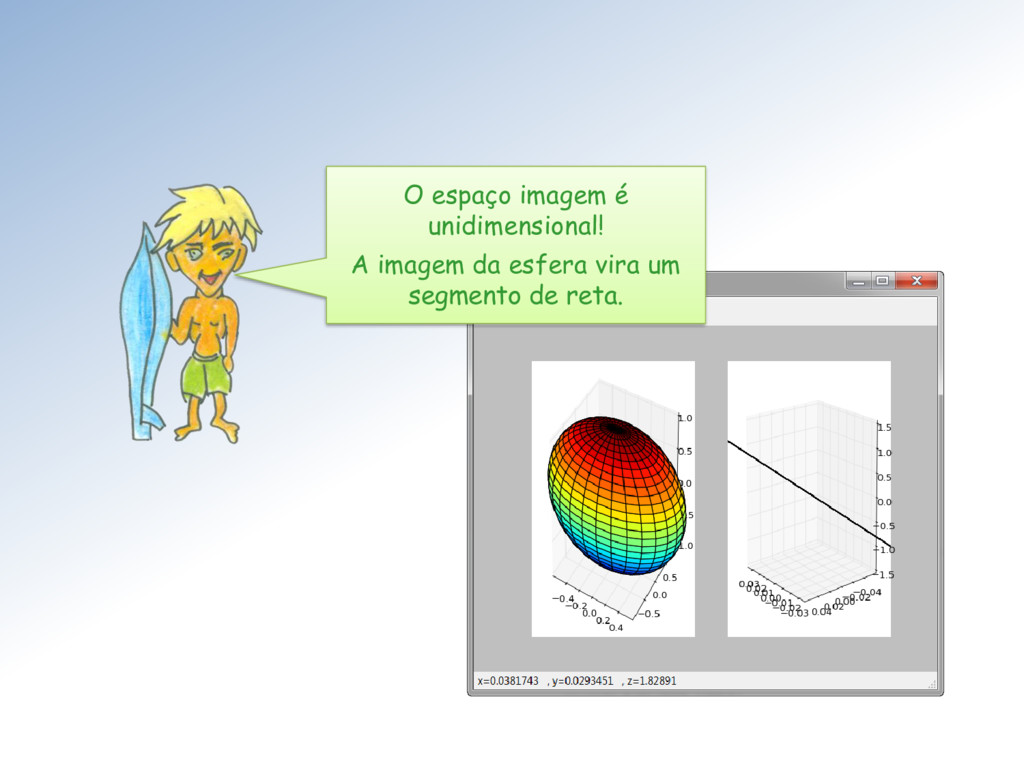
linearmente independentes ou seja é a dimensão da imagem de : = ∈ ℝ y = Ax, x ∈ ℝ } O núcleo de uma matriz ∈ ℳ× é o subespaço ú = ∈ ℝ = 0 }. A dimensão de ú é denominada nulidade de , e anotada .
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}