Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Diffusion Model with Perceptual Loss
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Henry Cui
January 26, 2024
Research
530
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Diffusion Model with Perceptual Loss
Henry Cui
January 26, 2024
More Decks by Henry Cui
See All by Henry Cui
プロダクション言語モデルの情報を盗む攻撃 / Stealing Part of a Production Language Model
zchenry
1
260
Direct Preference Optimization
zchenry
0
470
レンズの下のLLM / LLM under the Lens
zchenry
0
240
Go with the Prompt Flow
zchenry
0
230
Mojo Dojo
zchenry
0
270
ことのはの力で画像の異常検知 / Anomaly Detection by Language
zchenry
0
730
驚愕の事実!LangChainが抱える問題 / Problems of LangChain
zchenry
0
330
MLOps初心者がMLflowを触る / MLflow Brief Introduction
zchenry
0
220
{{guidance}}のガイダンス / Guidance of guidance
zchenry
0
210
Other Decks in Research
See All in Research
Sleuthcon Keynote - How Cybercriminals (ab)use AI
fr0gger
0
260
SLAMはどこまで解決されたのか?
tomonom
0
840
某助成金プロジェクト採択に向けて企業研究所のアウトリーチ専任者がやったこと
afroscript
0
110
AIエージェント時代のLLM-jpモデルのあるべき姿
k141303
0
520
Harness Engineering and Al Agent
kzinmr
3
1.8k
多様なデータを許容し学習し続ける模倣学習 / Advanced Imitation Learning for VLA
prinlab
0
250
計算情報学研究室 (数理情報学第7研究室)2026
tomohirokoana
0
660
PGDM: Physically Guided Diffusion Model for L Downscaling
satai
3
360
Anthropic が提案する LLM の内部状態を自然言語で説明可能にした Natural Language Autoencoders / Natural Language Autoencoders Produce Unsupervised Explanations of LLM Activations
shunk031
0
150
人間中心の意思決定支援AI
yukinobaba
PRO
7
3.5k
JICA QUEST 共創×革新プログラム Impact Report(海ノ向こうコーヒー)
ontheslope
0
220
NLP colloquium: AI Safety Survey
kanekomasahiro
0
860
Featured
See All Featured
Accessibility Awareness
sabderemane
1
160
YesSQL, Process and Tooling at Scale
rocio
174
15k
Templates, Plugins, & Blocks: Oh My! Creating the theme that thinks of everything
marktimemedia
31
2.8k
Utilizing Notion as your number one productivity tool
mfonobong
4
440
Ten Tips & Tricks for a 🌱 transition
stuffmc
0
150
CSS Pre-Processors: Stylus, Less & Sass
bermonpainter
360
30k
Bootstrapping a Software Product
garrettdimon
PRO
307
120k
Building a Scalable Design System with Sketch
lauravandoore
463
34k
Cheating the UX When There Is Nothing More to Optimize - PixelPioneers
stephaniewalter
287
14k
CoffeeScript is Beautiful & I Never Want to Write Plain JavaScript Again
sstephenson
162
16k
First, design no harm
axbom
PRO
2
1.2k
Put a Button on it: Removing Barriers to Going Fast.
kastner
60
4.4k
Transcript
Diffusion Model with Perceptual Loss 機械学習の社会実装勉強会第31回 Henry 2024/1/27
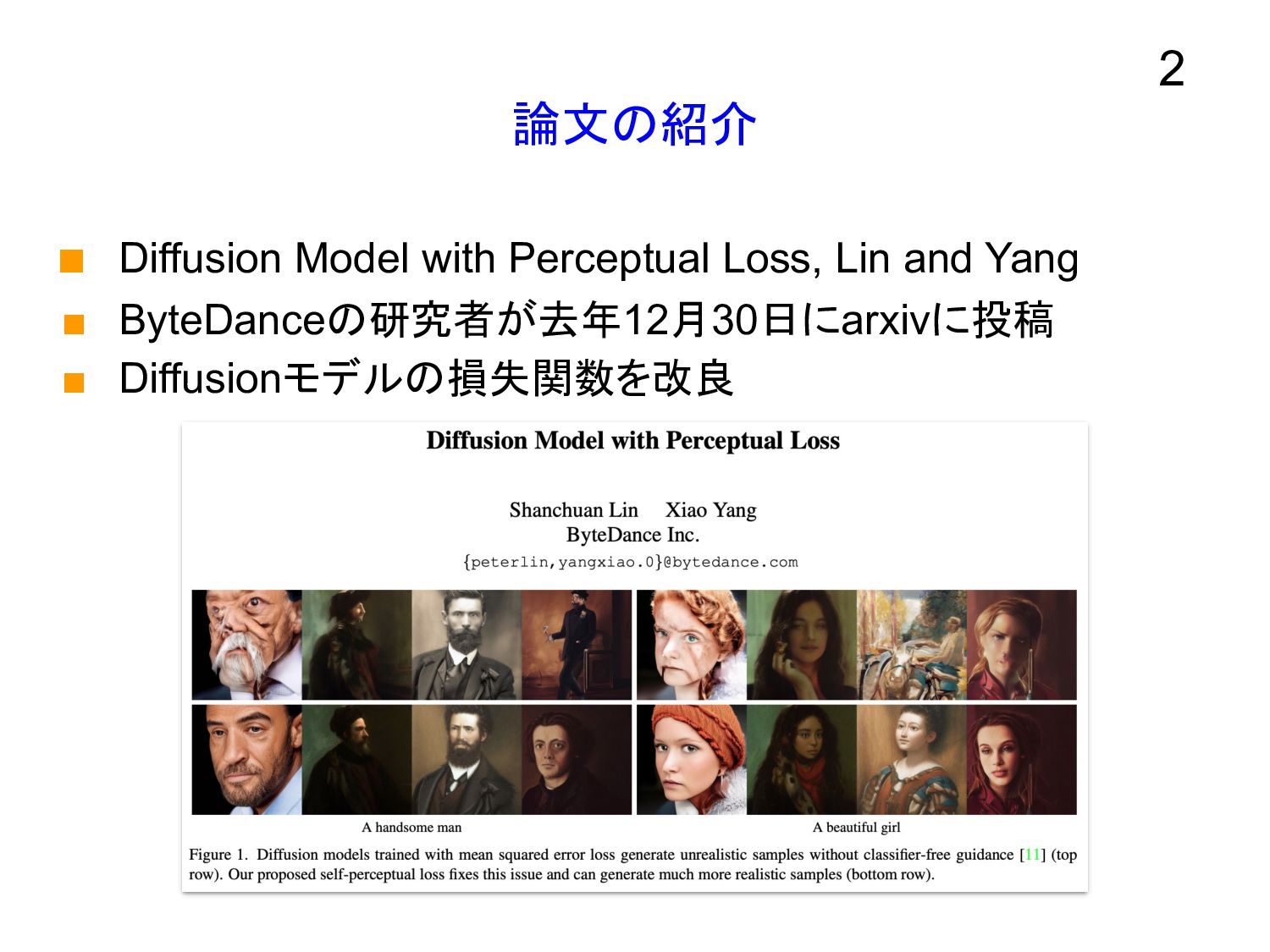
論文の紹介 ▪ Diffusion Model with Perceptual Loss, Lin and Yang
▪ ByteDanceの研究者が去年12月30日にarxivに投稿 ▪ Diffusionモデルの損失関数を改良 2
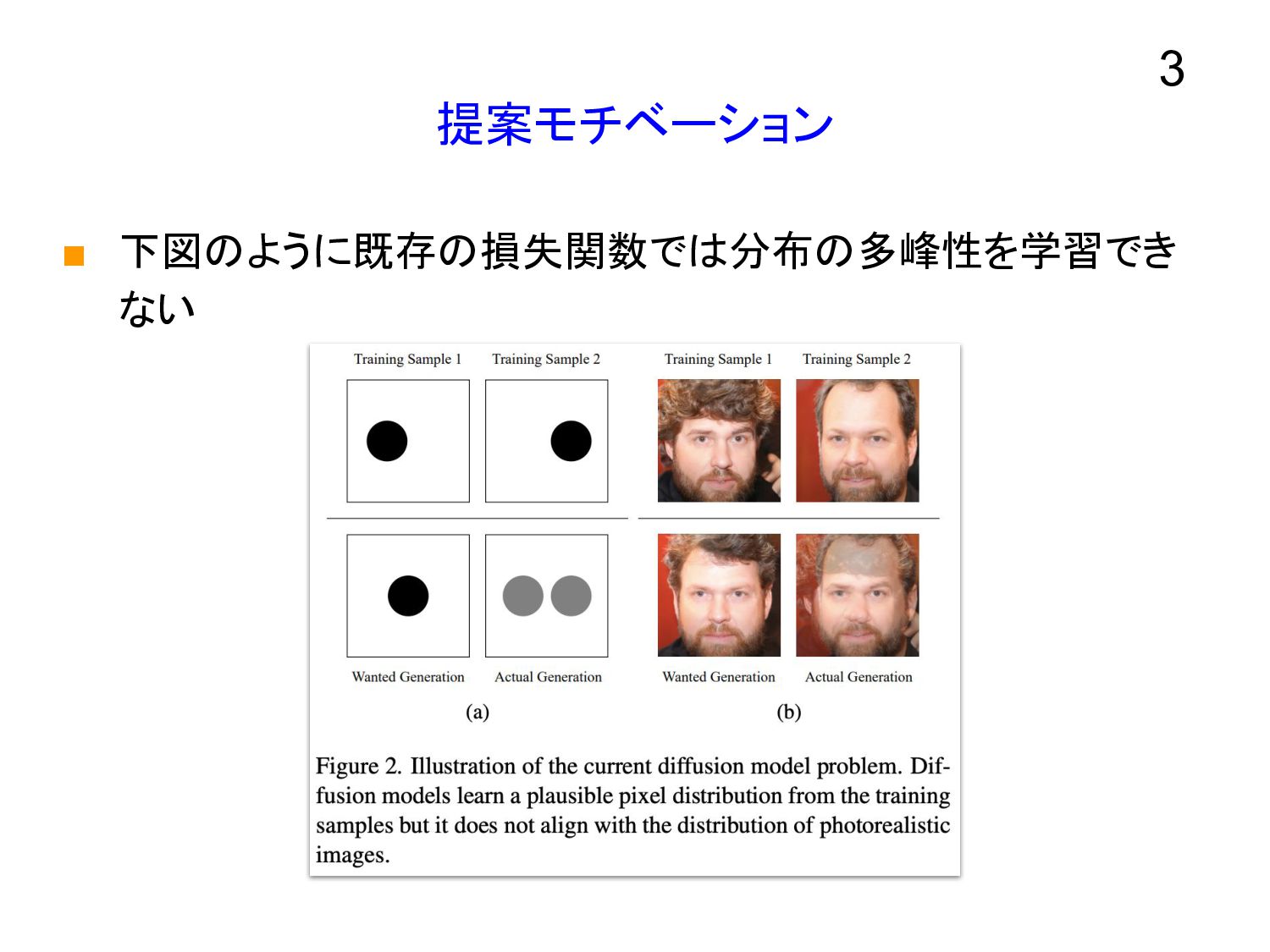
提案モチベーション ▪ 下図のように既存の損失関数では分布の多峰性を学習でき ない 3
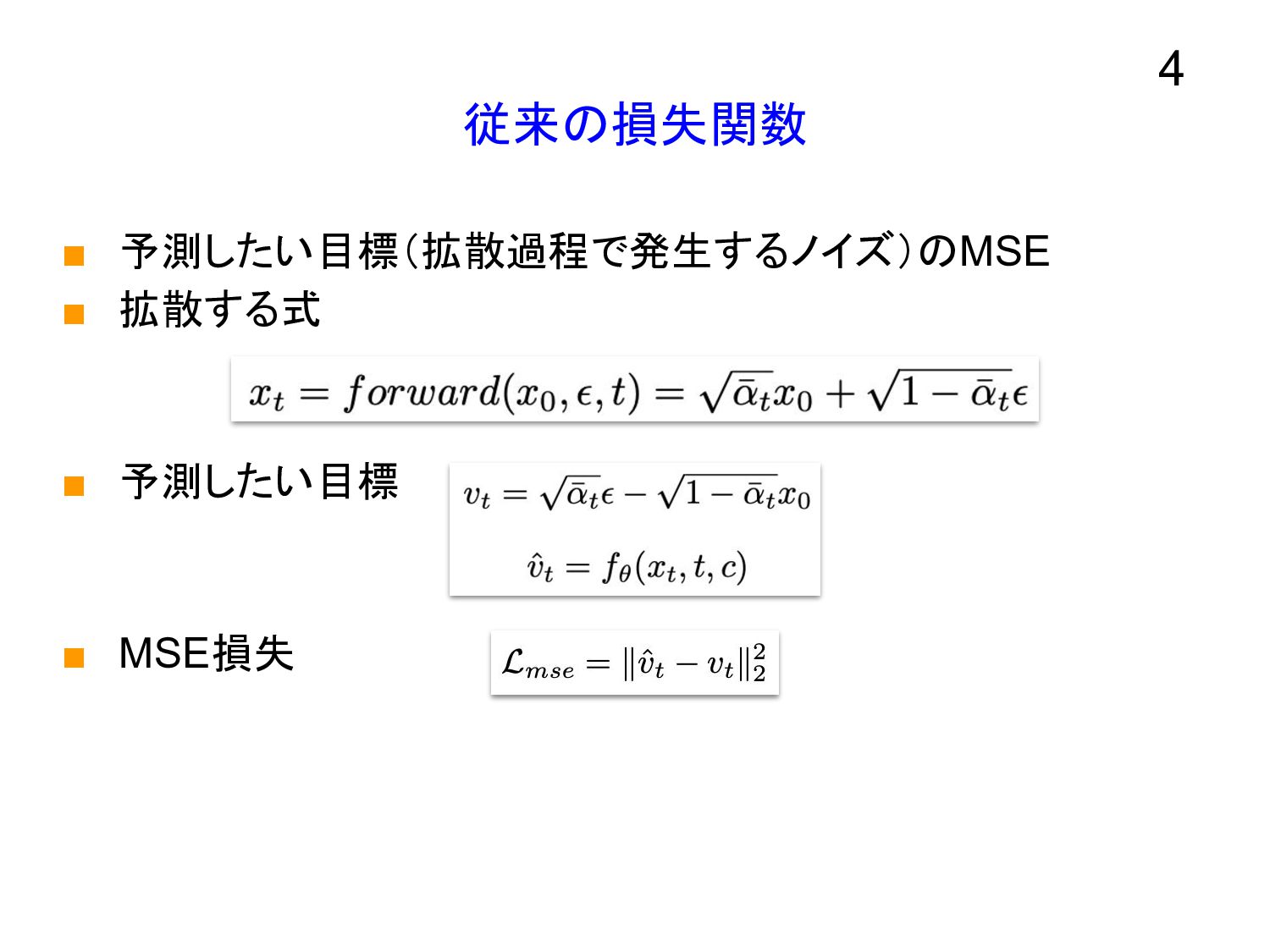
従来の損失関数 ▪ 予測したい目標(拡散過程で発生するノイズ)のMSE ▪ 拡散する式 ▪ 予測したい目標 ▪ MSE損失 4
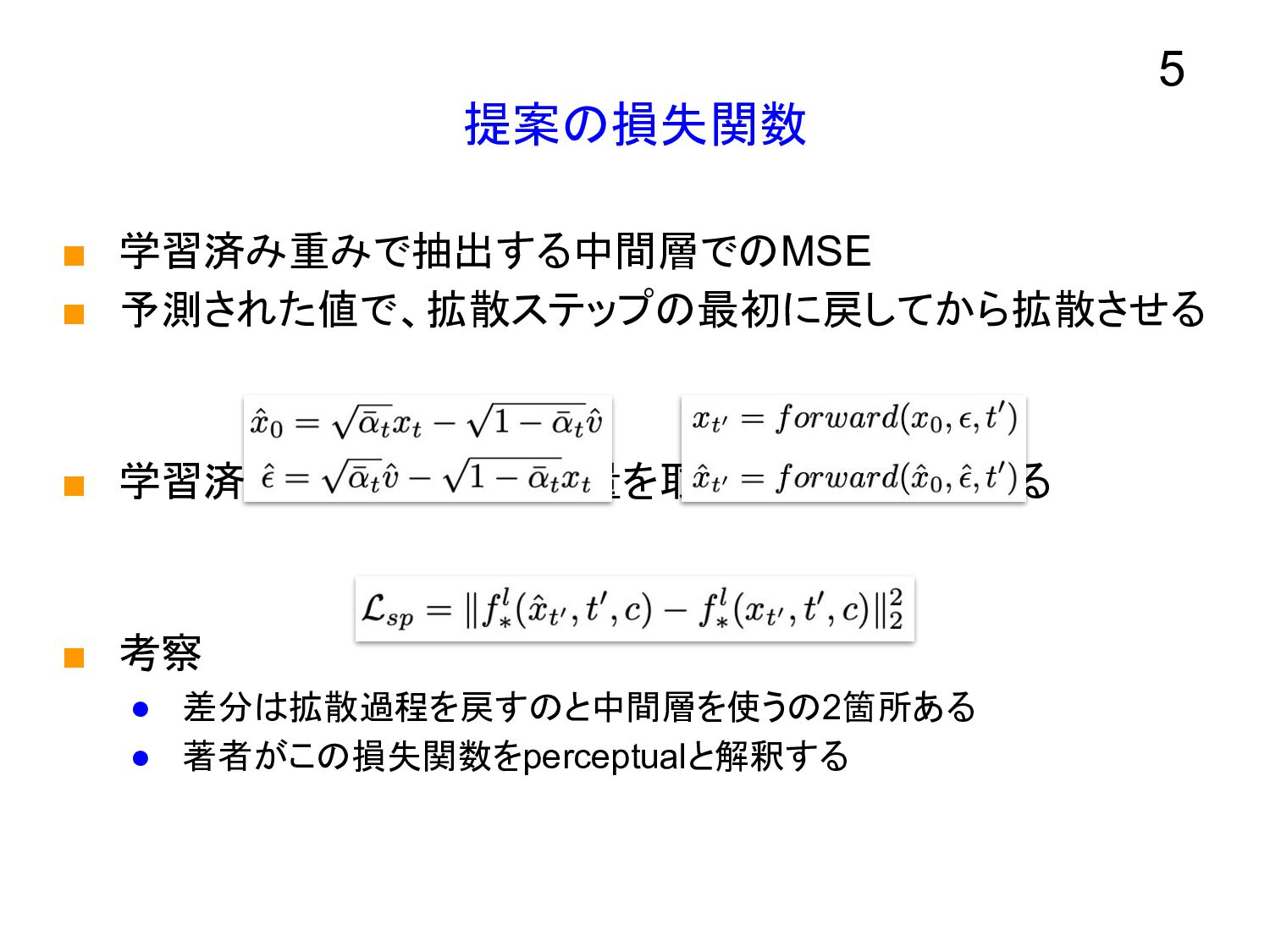
提案の損失関数 ▪ 学習済み重みで抽出する中間層でのMSE ▪ 予測された値で、拡散ステップの最初に戻してから拡散させる ▪ 学習済み重みで中間特徴量を取り出してMSEを取る ▪ 考察 •
差分は拡散過程を戻すのと中間層を使うの2箇所ある • 著者がこの損失関数をperceptualと解釈する 5
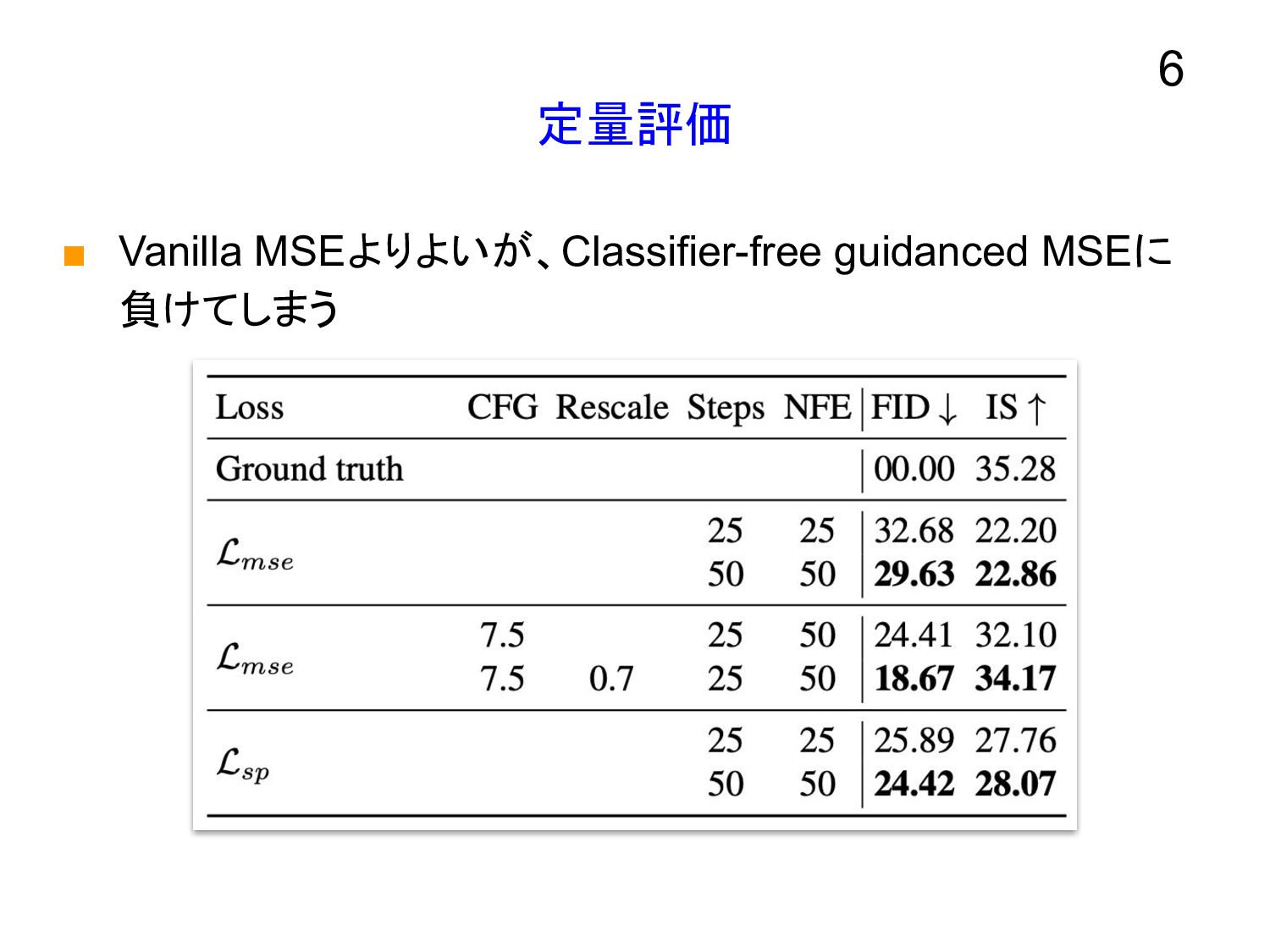
定量評価 ▪ Vanilla MSEよりよいが、Classifier-free guidanced MSEに 負けてしまう 6
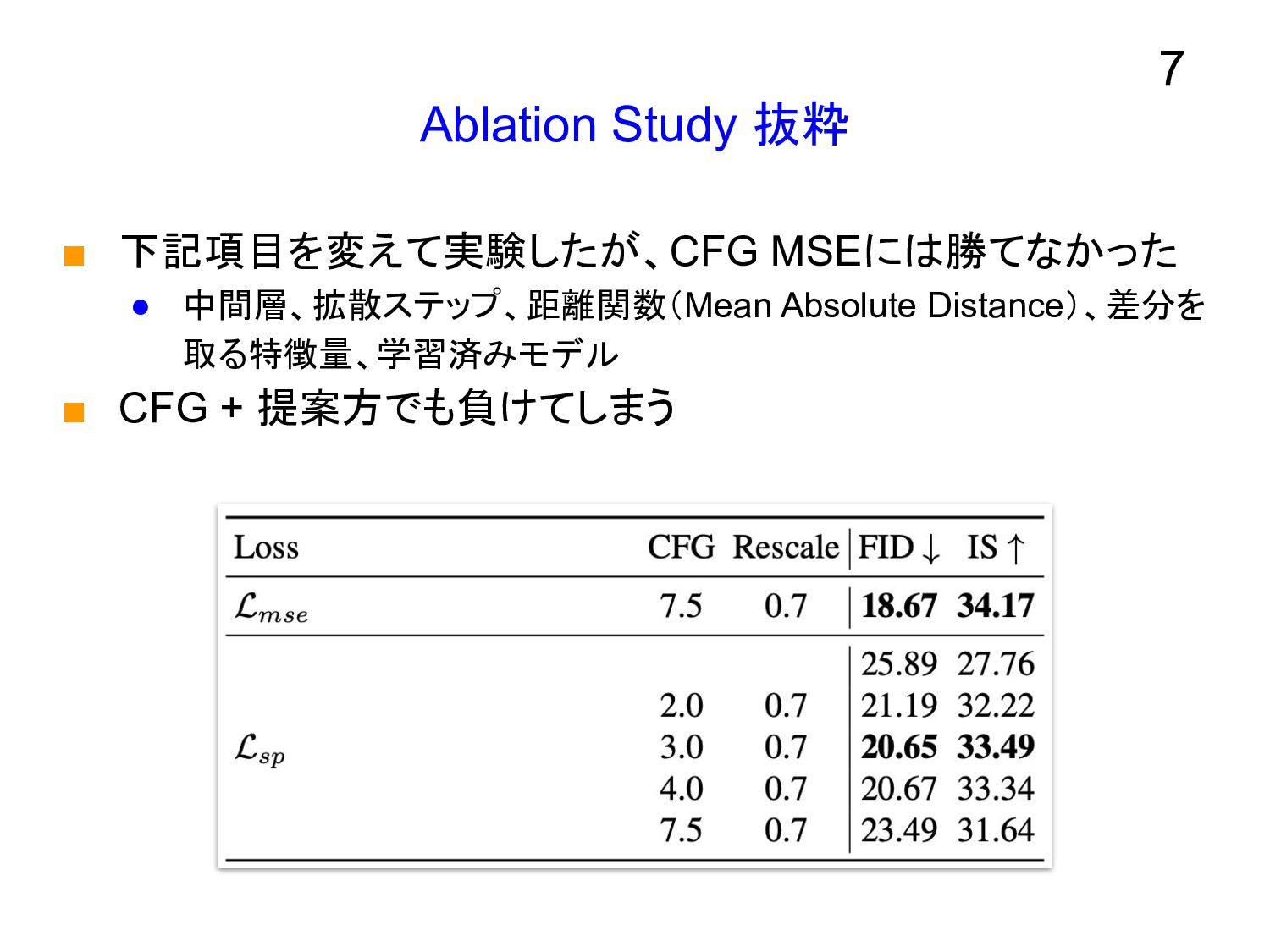
Ablation Study 抜粋 ▪ 下記項目を変えて実験したが、CFG MSEには勝てなかった • 中間層、拡散ステップ、距離関数(Mean Absolute Distance)、差分を
取る特徴量、学習済みモデル ▪ CFG + 提案方でも負けてしまう 7
まとめ ▪ Diffusion Modelの損失関数を改良する提案手法 ▪ 中間層を使うヒントになる 8
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}