Comment définir la saillance ? • Modélisation de la surface d’un maillage 3D • Construction des patches locaux adaptatifs • Saillance Mono/Multi-échelle • Concordance avec une pseudo-vérité terrain • Comparaison avec l’état de l’art • Sélection des points de vues optimaux • Perspectives 2
2 mécanismes attentionnels dans la vision humaine: Bottom-up (Ascendant) : La saillance ici est involontaire et est liée aux propriétés du stimuli « l’objet saute aux yeux ». Top-down (descendant) : La saillance dépend de ce que l’observateur recherche. « la facilité à trouver sur scène un objet déterminé ». Objectif : Déterminer La saillance liée au processus Ascendant appelée Saillance attentionnelle. Comment définir la saillance ? 5
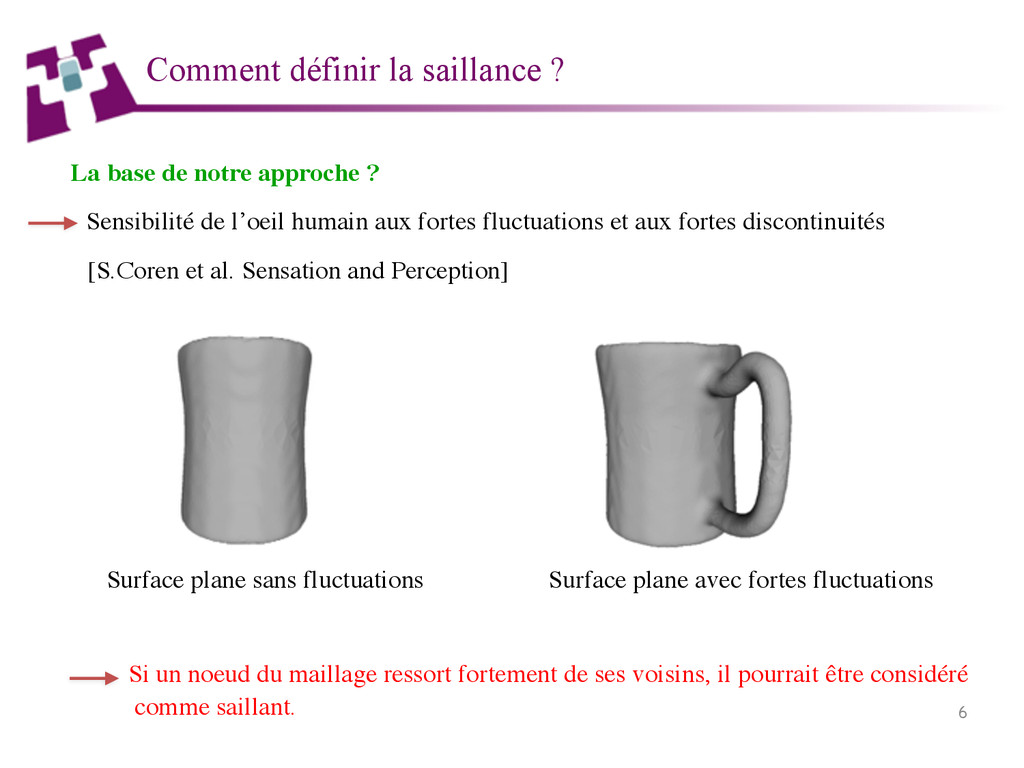
la saillance ? Sensibilité de l’oeil humain aux fortes fluctuations et aux fortes discontinuités Si un noeud du maillage ressort fortement de ses voisins, il pourrait être considéré comme saillant. La base de notre approche ? Surface plane sans fluctuations Surface plane avec fortes fluctuations 6 [S.Coren et al. Sensation and Perception]
la surface 3D Objectif : Définir en chaque noeud du maillage un vecteur représentant la normale et le plan 2D tangent. ! Pour cela : ! l'ensemble des sommets l'ensemble des arêtes reliant un couple de sommets, le poids de l'arête . w(vi, vj) (vi, vj) 2 E G = (V, E, w) V E = V ⇥ V Soit un maillage M représenté par un graphe non orienté : 8
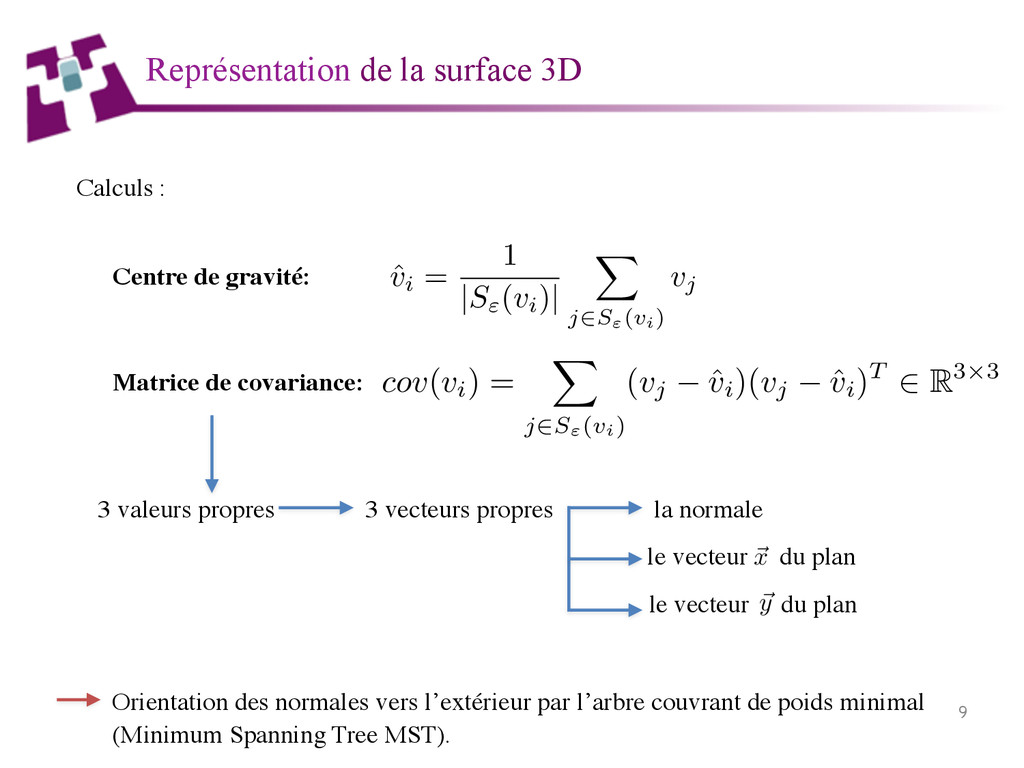
la surface 3D 3 valeurs propres 3 vecteurs propres la normale le vecteur du plan le vecteur du plan Calculs : Centre de gravité: Matrice de covariance: ~ x ~ y Orientation des normales vers l’extérieur par l’arbre couvrant de poids minimal (Minimum Spanning Tree MST). 9 ˆ vi = 1 |S"(vi)| X j2S"(vi) vj cov ( vi) = X j2S"(vi) ( vj ˆ vi)( vj ˆ vi)T 2 R3⇥3
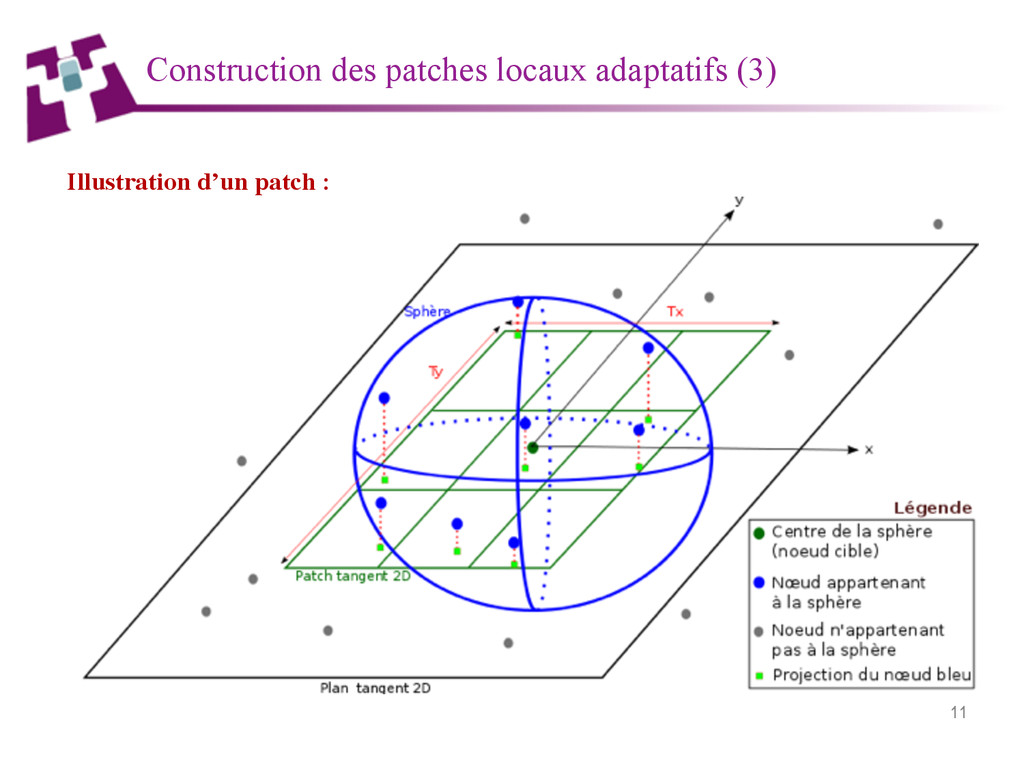
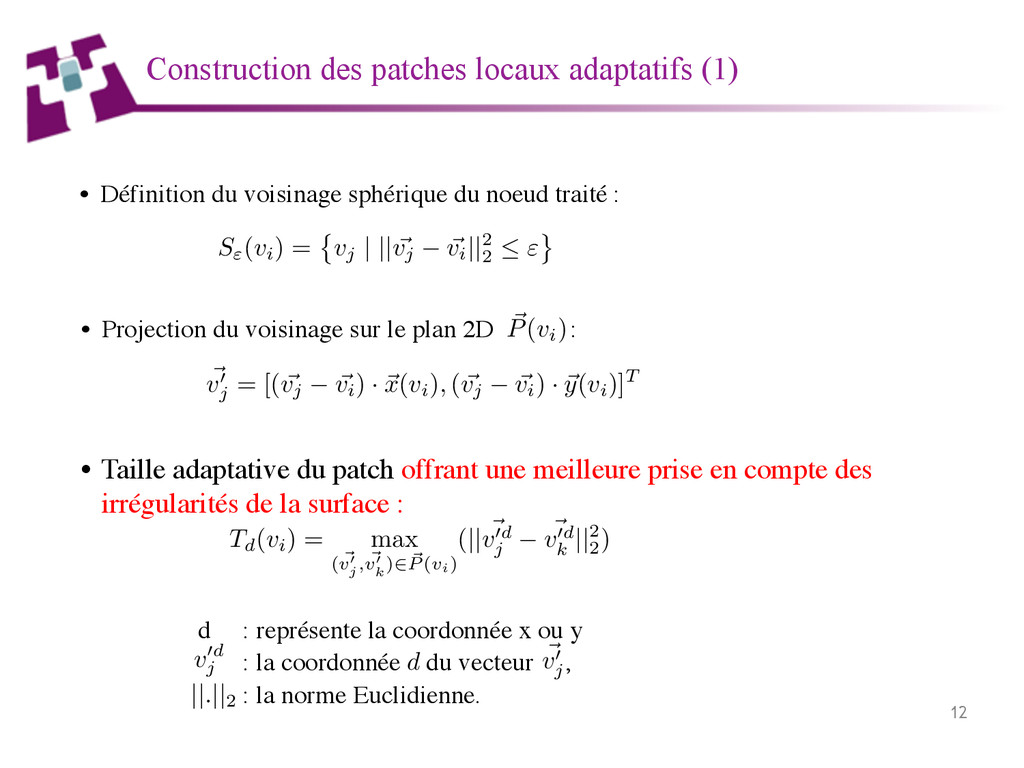
patches locaux adaptatifs (1) • Définition du voisinage sphérique du noeud traité : S"(vi) = vj | ||~ vj ~ vi ||2 2 " • Projection du voisinage sur le plan 2D : ~ v 0 j = [( ~ vj ~ vi) · ~ x ( vi) , ( ~ vj ~ vi) · ~ y ( vi)]T ~ P(vi) • Taille adaptative du patch offrant une meilleure prise en compte des irrégularités de la surface : Td( vi) = max ( ~ v0 j , ~ v0 k )2 ~ P (vi) ( || ~ v0d j ~ v0d k ||2 2) d : représente la coordonnée x ou y : la coordonnée du vecteur , : la norme Euclidienne. v0d j d ~ v0 j ||.||2 12
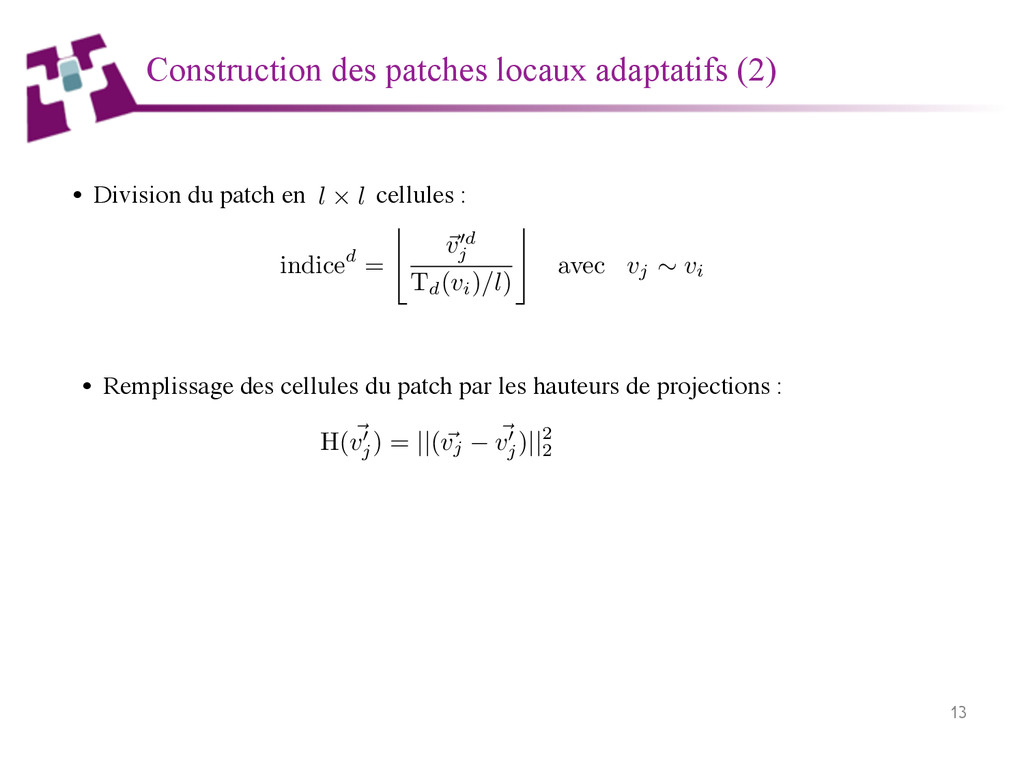
du patch en cellules : Construction des patches locaux adaptatifs (2) l ⇥ l indiced = $ ~ v0d j Td(vi)/l) % avec vj ⇠ vi • Remplissage des cellules du patch par les hauteurs de projections : H(~ v0 j ) = ||(~ vj ~ v0 j )||2 2 13
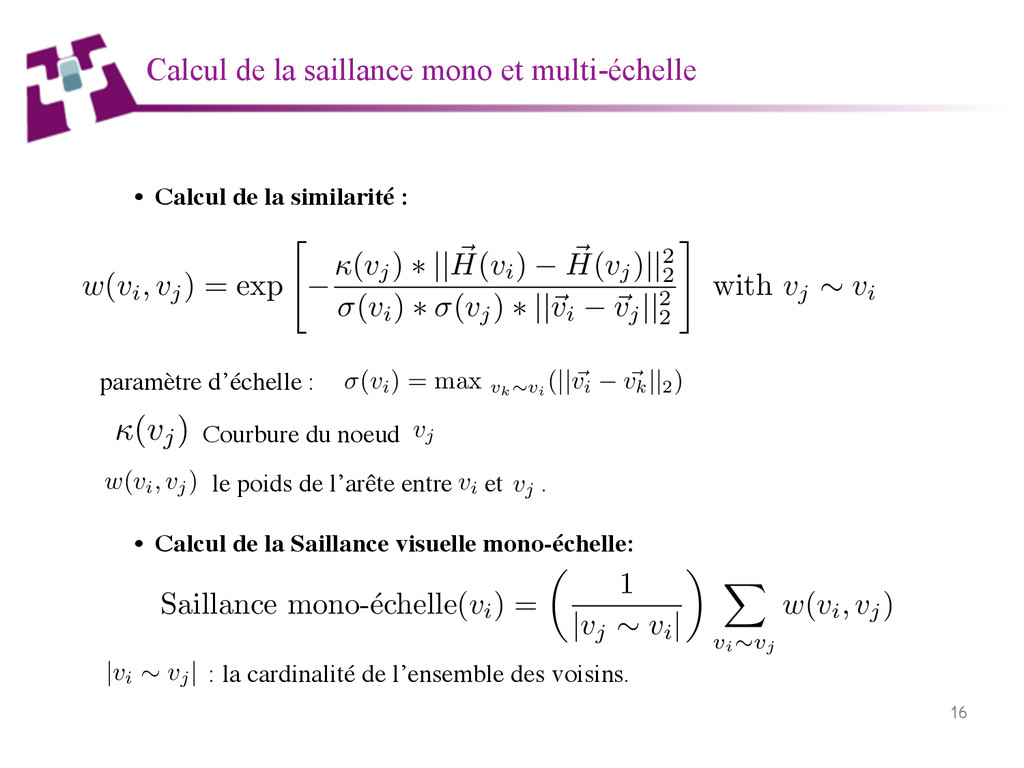
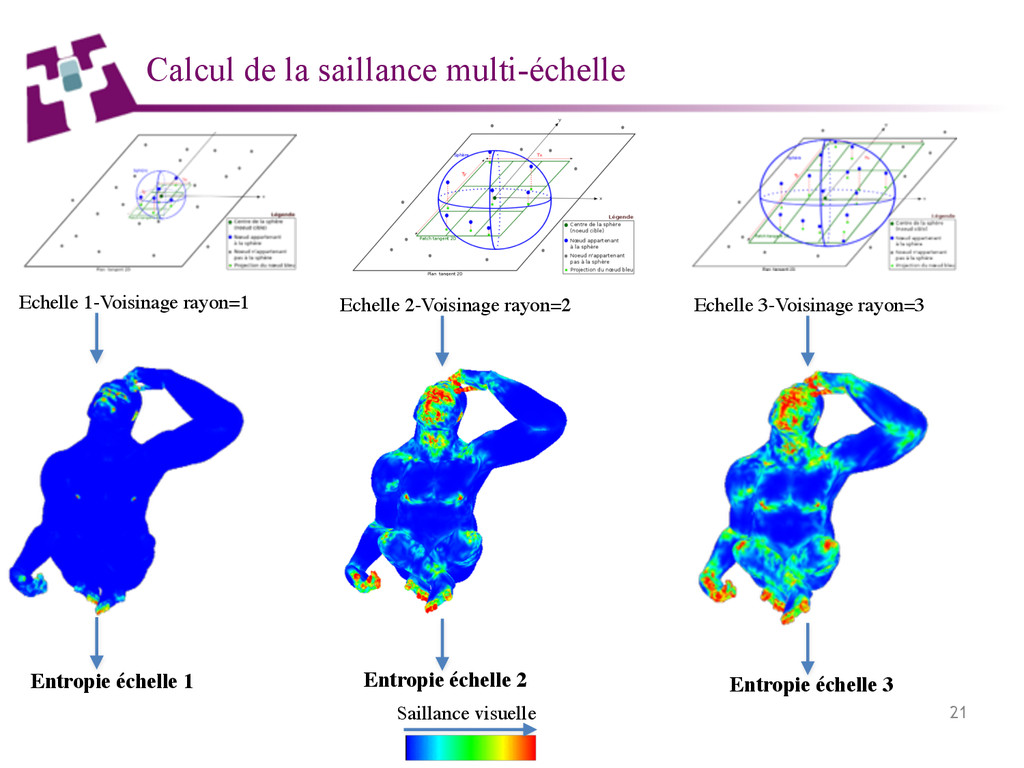
la saillance mono et multi-échelle • Calcul de la similarité : ( vi) = max vk ⇠vi ( ||~ vi ~ vk ||2) paramètre d’échelle : le poids de l’arête entre et . w(vi, vj) vi vj • Calcul de la Saillance visuelle mono-échelle: : la cardinalité de l’ensemble des voisins. 16 |vi ⇠ vj | Saillance mono-´ echelle( vi) = ✓ 1 |vj ⇠ vi | ◆ X vi ⇠vj w ( vi, vj) w ( vi , vj) = exp " ( vj) ⇤ || ~ H ( vi) ~ H ( vj) ||2 2 ( vi) ⇤ ( vj) ⇤ ||~ vi ~ vj ||2 2 # with vj ⇠ vi (vj) Courbure du noeud vj
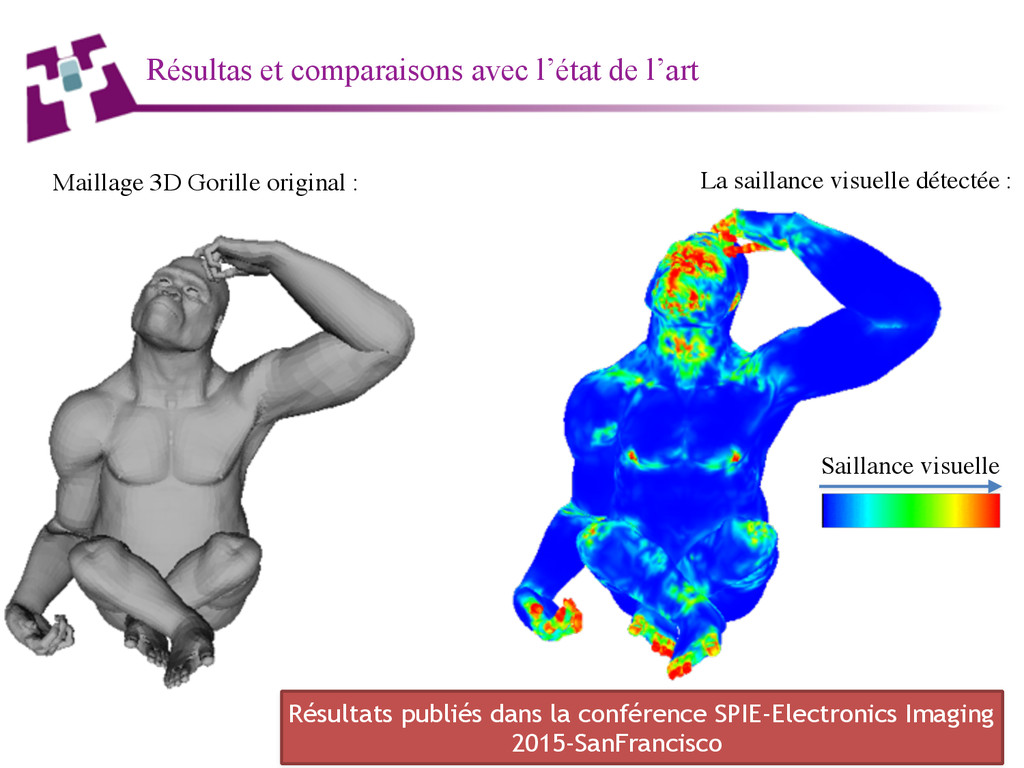
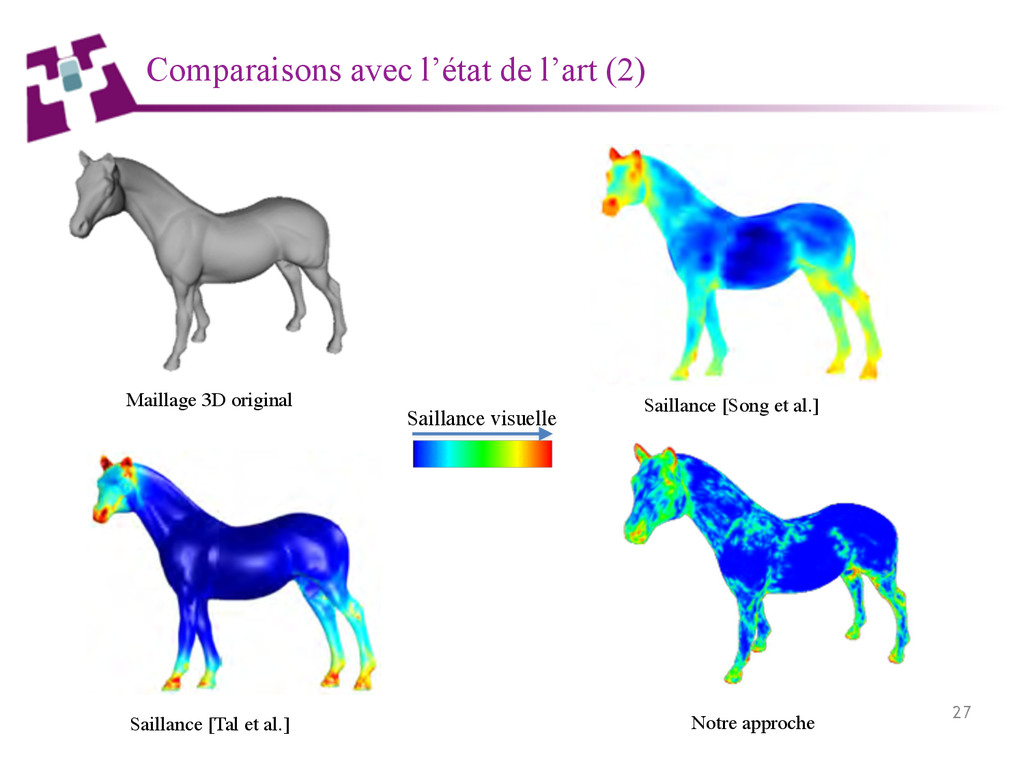
comparaisons avec l’état de l’art Maillage 3D Gorille original : 18 La saillance visuelle détectée : Résultats publiés dans la conférence SPIE-Electronics Imaging 2015-SanFrancisco Saillance visuelle
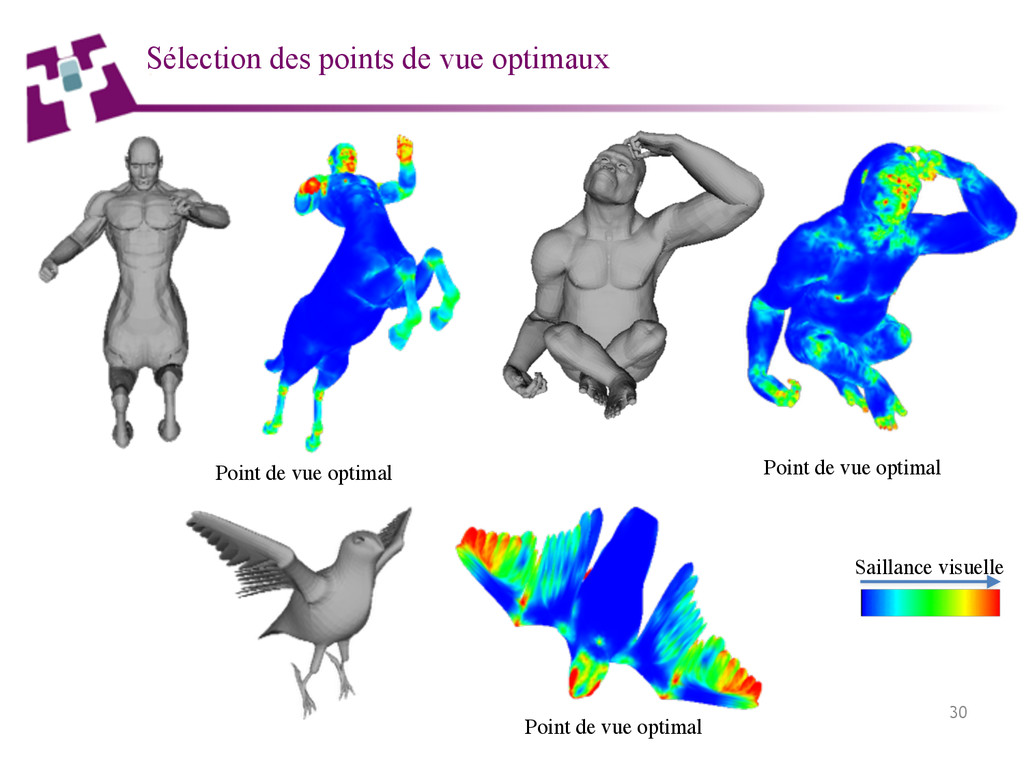
Sélection des points de vue optimaux 29 Présenter les points de vues les plus saillants du maillage 3D à l’observateur. Critère principal : Sélectionner les régions maximisant la saillance visuelle. Pour cela : 1) Echantillonnage d’une sphère englobant le maillage suivant l’axe x et sélection du meilleur point de vue Px. 2) A partir de Px, même processus selon l’axe y (sélection de Py). 3) A partir de Py, descente de gradient et sélection du point de vue optimal.
Amélioration de la carte de saillance. • Prise en compte de nouveaux attributs. • Analyse de leurs contributions respectives. Implémenter la saillance pour d’autres applications: Compression d’objets 3D : moins compresser les zones saillantes (préservation des détails). 31
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}